约束非线性系统稳定经济模型预测控制
2016-12-17何德峰
何德峰
约束非线性系统稳定经济模型预测控制
何德峰1
考虑约束非线性系统,提出一种新的具有稳定性保证的经济模型预测控制(Economic model predictive control, EMPC)策略.由于经济性能指标的非凸性和非正定性,引入关于经济最优平衡点的正定辅助函数.利用辅助函数的最优值函数定义原始EMPC优化问题的稳定性约束.应用终端约束集、终端代价函数和局部控制器三要素,建立闭环系统关于经济最优平衡点的渐近稳定性和渐近平均性能.进一步,结合多目标理想点概念,将提出的控制策略用于多个经济性能指标的优化控制,得到稳定多目标EMPC策略.最后,以连续搅拌反应器为例,比较仿真结果验证本文策略的有效性.
模型预测控制,非线性系统,经济优化,稳定性,多目标控制
近年来,经济模型预测控制(Economic model predictive control,EMPC)在学术界和工业界受到了广泛关注[1−15].EMPC的一个显著优点是将过程实时控制与经济性能优化集成在一个最优控制的框架内设计[1−2].不同于传统MPC(Model predictive control)需要预先设定目标值为前提(故也称为目标跟踪型MPC)[1],EMPC原则上并不需要这样一个前提[2].由于这类MPC性能函数通常与过程的经济(环保)性能相关,故统称为经济MPC.但该“经济”并不特指某个经济性能,而泛指一类非正定和(或)非凸的任意性能函数.尽管如此,经济MPC和传统MPC的实施机理一样,即都采用滚动时域方式实现系统的闭环状态(或输出)反馈控制[1−3],但直接优化经济性能计算控制量给EMPC带来更复杂的稳定性问题[1,16].
常规EMPC稳定性需引入强对偶性或耗散性假设,并附加罚函数将经济性能函数转换为正定性能函数,再结合终端等式或不等式约束,建立EMPC的递推可行性和闭环稳定性[4−8,16−17].由于系统与性能函数不一定满足正则性(Regulation)条件[6],约束非线性系统通常不满足对偶性与耗散性假设[4].进一步,由于附加项通常是平衡点偏差的函数,将改变原经济性能的最优路径,影响原始经济性能,特别是终端等式约束加重了EMPC在线优化的计算量,同时会减小EMPC的吸引域.针对终端约束对经济性能的影响,文献[18]应用耗散性和能控性假设建立了无终端约束EMPC稳定性,但要求预测时域足够大,而这将增加EMPC在线优化的计算量.基于能控性假设和切换控制思想,文献[19]提出了基于Lyapunov函数的稳定EMPC策略,但为保证闭环系统的稳定性和渐近平均性能,需要在线求解三个非线性最优控制问题[20],增加了EMPC运行的复杂性.现有研究结果表明, EMPC的经济性能与稳定性存在一定的矛盾[7,16].如何在优化经济性能的同时确保闭环系统的稳定性是EMPC研究的一个关键问题.
另一方面,在工业过程经济目标优化操作中,通常存在多个相互矛盾的性能指标[21−22],且这些性能指标具有不同的物理含义.因为加权函数法使用简单,在控制实践中,通常被用来近似处理多目标优化控制问题.但各目标加权系数的选择与整定需要通过大量的离线实验完成,特别是在系统约束和目标函数非凸的情况下,权值选择与整定会异常困难[22−23].近年来,提出了一些新的多目标优化MPC设计,如基于稳态目标规划计算的双层多目标MPC[23]、参数规划多目标线性MPC[24]、混合逻辑整数规划多目标MPC[25−27]、考虑性能指标优先级要求的多目标MPC[28−30]以及基于多目标理想点跟踪的多目标MPC[31−32]等.由于理想点跟踪多目标MPC策略不需要人为选择各性能的加权系数,在不需要系统先验知识的条件下能自动处理各个性能指标的冲突性,成为目前广受关注的一种多目标MPC策略.但在理想点跟踪多目标MPC中,由于性能指标相互冲突,折中性能函数在稳态平衡点不为零,即折中性能函数不是稳态平衡点的正定函数,对应的控制器通常不稳定,因此可看作是一类特殊的EMPC问题,可采用EMPC方法建立理想点跟踪多目标MPC的闭环稳定性.
本文考虑具有状态和控制约束的非线性系统,提出一种新的具有递推可行性和稳定性保证的EMPC策略.通过离线计算经济性能指标的最优平衡点,引入关于该点偏差的正定辅助函数.利用辅助函数的最优值函数定义原始EMPC优化问题的一个稳定性约束.再应用终端约束集、终端代价函数和局部控制器等三要素[3],建立闭环系统关于经济最优平衡点的渐近稳定性和渐近平均性能.与现有稳定EMPC策略相比,本文的一个主要创新点是EMPC的递推可行性和渐近稳定性与非线性系统的强对偶性、耗散性条件无关,从而简化EMPC策略的设计.进一步,结合多目标理想点法[31],将上述结果推广至多个经济性能指标的优化控制问题,提出一种新的具有稳定性保证的理想点跟踪多目标EMPC策略.最后以连续搅拌反应器多目标控制为例,对比仿真验证本文结果的有效性.
符号说明:集合R≥0和I≥0分别表示非负实数集和非负整数集.Ia:b={i∈I≥0:a≤i≤b},其中a∈I≥0和b∈I≥0.符号uk表示k∈I时刻的一个信号序列,系统在k∈I≥0时刻的状态为系统在零时刻的状态.给定一个向量符号T表示的转置,表示的p范数,表示在第k时刻对
未来第k+i时刻的预测变量.
1 问题描述
考虑离散时间非线性系统
考虑经济性能函数Le:X×U→R.该函数关于连续且有界,但可能是非凸的且对于任意不一定是正定的.由文献[16]可知,极小化这类性能函数的控制律不一定保证闭环系统渐近稳定,甚至出现震荡和周期响应.尽管周期响应适用一些间歇工业过程,但大部分连续工业过程要求闭环系统是渐近稳定的.本文目标是设计一个经济最优状态反馈控制律使闭环系统能渐近稳定于最优经济平衡点同时满足系统状态和控制约束(2),以及渐近平均性能条件
2 稳定经济预测控制
2.1 预测控制器
令N∈I≥1为预测时域,定义k时刻的N步预测控制序列和对应预测状态序列给定紧集XT⊂X,如果uk满足∀i∈I0:N−1,以及和则该控制序列称为系统(1)的一个可行预测控制序列.
考虑系统(1)的一个可行预测控制序列uk及其对应的预测状态序列xk,定义如下目标函数:

为计算EMPC控制律,在每个时刻求解如下有限时域最优控制问题
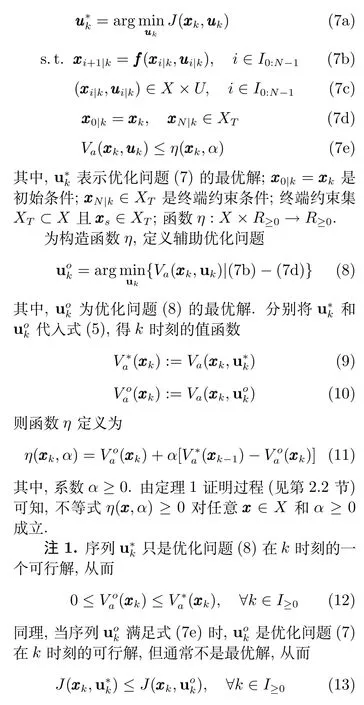
如果优化问题(7)在k时刻是可行的,则根据滚动时域控制原理,定义经济预测控制律如下:


本文将证明值函数(9)是系统(15)的Lyapunov函数,建立闭环系统关于的渐近稳定性结论.
算法1.(EMPC算法)
2.2 稳定性与平均性能
显然,XN满足XT⊆XN⊆X,且XN⊂XN+1.
定理1.如果假设1和2成立,则对于任意给定α≥0,优化问题(7)在XN内具有递推可行性,进而XN是闭环系统(15)的一个不变集.


进一步考虑控制序列(16),可得:

定理2.如果假设1和2成立,且优化问题(7)在初始时刻存在可行解.给定α∈[0,1),则是闭环系统(15)在XN内的渐近稳定平衡点,且XN是闭环系统的一个吸引域.
证明.任意给定α∈[0,1),由于优化问题(7)在初始时刻是可行的.根据定理1可知,该优化问题在任意k时刻存在可行解.

考虑假设1和2,将式(19)代入不等式(20)并整理得:

注3. 由定理2证明过程可知,闭环系统(15)的稳定性是通过不等式(7e)建立的,即利用(Ea,XT,π)满足假设1和2,使函数(9)成为闭环系统的Lyapunov函数,因此式(7e)是一类基于Lyapunov函数的稳定性约束.在常规的基于Lyapunov函数MPC策略[1,38]中,性能函数是关于平衡点偏差的正定函数,故Lyapunov稳定性约束是通过强制一个已知的正定函数的导数小于零构造的,而本文采用MPC的三要素原理建立闭环系统的Lyapunov函数,因此是两种不同的稳定性约束条件.其次,经济优化问题(7)的最优解并不能保证是优化问题(8)的最优解,而通常只是一个可行解;同理,尽管是优化问题(8)的最优解,但只是优化问题(7)的一个可行解.尽管如此,结合定理1和MPC三要素原理可得,由最优解定义的滚动时域控制器同样能保证的渐近稳定性,且XN是对应闭环系统的一个吸引域.最后,控制序列(16)只是优化问题(8)的一个可行序列,但不一定是优化问题(7)的可行序列,因为不等式(17)使得序列(16)不一定满足约束(7e).
定理3.如果假设1和2成立,且优化问题(7)在初始时刻存在可行解.如果给定α∈[0,1),则闭环系统(15)在吸引域XN内满足渐近平均性能(3).


即任意充分小ε>0,总存在一个有限时间T∗,当T>T∗时,式(24)成立.从而由极限理论可知,

结合式(25),对式(22)两边同时取极限,可得:

即闭环系统(15)在XN内具有渐近平均性能. □
注 4.闭环系统的渐近平均性能(26)是建立在无穷时间域上的结果,因此,在任意一个有限时间区间的平均性能值不一定小于稳态经济性能
3 一类多目标经济预测控制
上述稳定EMPC策略可以推广应用到多经济目标优化控制问题.本节结合多目标理想点概念[39],给出一种稳定多目标EMPC策略.
3.1 多目标理想点
考虑l∈I≥2个连续且有界的性能函数Lj: X×U → R,j∈I1:l.令为函数向量.在多目标优化问题中,这些性能函数可能相互冲突,此时不存在唯一的最优解同时极小化各个性能函数j∈I1:l.通常采用Pareto最优解定义多目标优化问题的有效解,但Pareto最优解通常不唯一(甚至无穷多个),并在目标空间Rl形成一个Pareto面(Pareto front)[39].因此,文献[28–30]等对具有优先级排序的多目标优化控制问题,采用字典序多目标优化方法设计多目标MPC控制器;而文献[31–32]等对一类冲突但无排序要求的多目标优化控制问题,提出了理想点跟踪多目标MPC控制器设计等.


其中,向量p范数‖·‖p定义了目标空间中性能值到理想点L∗的距离.则本节的目的是设计一个多目标状态反馈控制器使闭环系统在约束(2)作用下能渐近稳定于Pareto解同时极小化一组性能函数为此,结合算法1和多目标理想点法,设计一种理想点跟踪多目标优化经济模型预测控制器.
3.2 多目标EMPC
下面给出多目标EMPC控制律(30)的实施步骤.
算法2.(多目标EMPC算法)
1)系统在吸引域XN内渐近稳定于
2)系统在XN内满足如下性能:
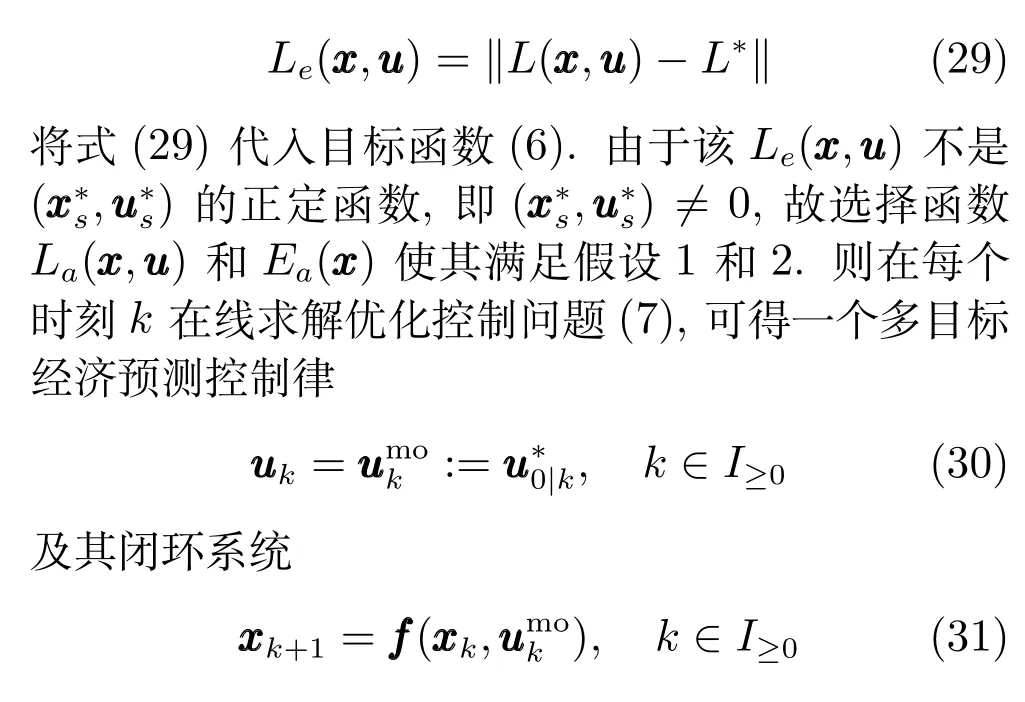
证明.考虑性能函数(29),并利用定理1~3的结果直接得到定理4. □
4 实例仿真
考虑二元物系聚合过程连续搅拌釜反应器[38],其动态聚合过程可描述为
其中,CA、T和Tc分别为反应物浓度(mol/L)、反应器温度(K)和冷却剂温度(K),模型参数为q=100 L/min,CAf=1 mol/L,UA=5×104J/min·K,ρ=1000 g/L,Cp=0.239 J/g·K, E/R=8750 K,k0=7.2×1010min−1,V=100 L,Tf=350 K,△H=−5×104J/mol.定义状态变量和控制变量u=Tc,及状态和控制约束

我们用多目标优化控制结果验证本文结果的有效性.
在聚合反应过程中,通常希望增强聚合反应速率以提高生产效率,即极小化性能函数

同时希望降低能源消耗,采用极小化性能函数

表示降低能源消耗.因此,一个理想的聚合反应过程控制器应该同时满足上述两个性能要求.
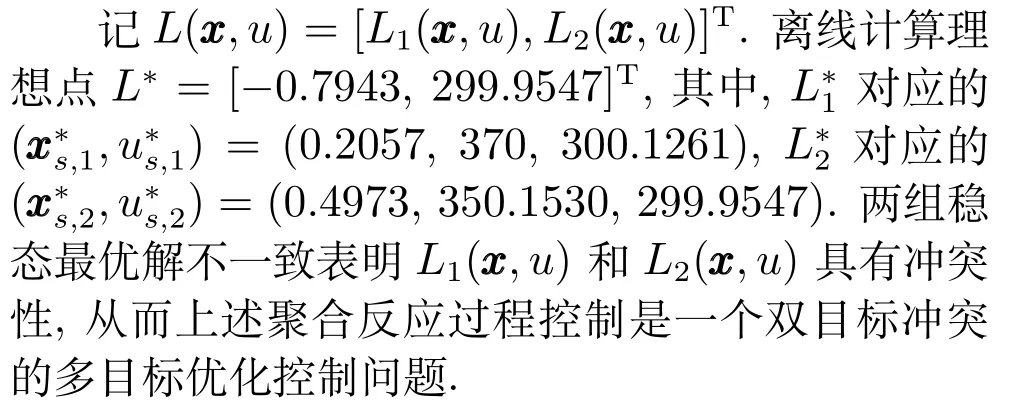
选择向量2-范数,定义折中经济性能函数
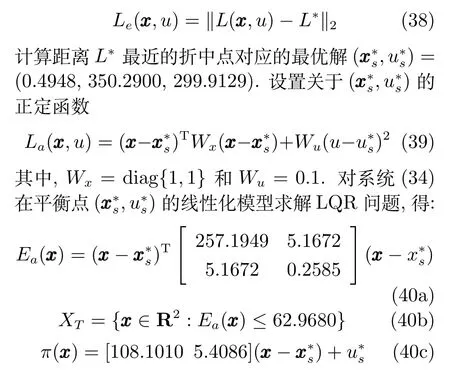
可以验证,三要素(40)满足假设1和2.
在仿真中,采用欧拉差分法离散系统(34),取采样周期为0.1 min,预测步长N为7,仿真总步长为30.采用MatLab 2007的fmincon函数优化计算最优控制问题(7)和(8).下面,先验证本文结果的正确性,再与文献[6]等提出的EMPC策略、常规目标跟踪型MPC策略做比较以验证本文结果的优越性.
4.1 仿真实验一
选取系统初始状态(0.7 mol/L,320 K),运行算法2,仿真结果如图1所示.其中,实线为α=0的仿真结果;虚线为α=0.3的仿真结果;点划线为α=0.7的仿真结果;点线为α=0.99的仿真结果.需要指出的是:为了更清楚地显示值函数在不同α取值时的差异,图1右下子图的时间坐标截取为前20步.由图1可知,对于系数α∈[0,1),值函数都是单调递减的.因此,由算法2产生的多目标EMPC及其闭环系统渐近稳定于Pareto最优稳态解且在所有时刻满足状态和控制约束(35).
尽管对系数α∈[0,1),闭环系统渐近稳定,但不同值对应的闭环系统的动态响应和经济性能是不一样的,图2给出了上述取值时的性能实时曲线.分析图1和2可知,α取值越小,值函数下降越快,闭环系统趋于最优平衡点的时间越短,但经济性能可能会下降,如图2左子图实线所示.反之亦然,如对应α=0.99的点线所示,尽管在30步仿真时间内,闭环系统还没有收敛至平衡点,但它的性能指标L1可以达到更小的值.因此,设计者可以通过调整α取值对闭环系统的收敛速度和经济性能进行权衡,从而提高经济预测控制器应用的灵活性.
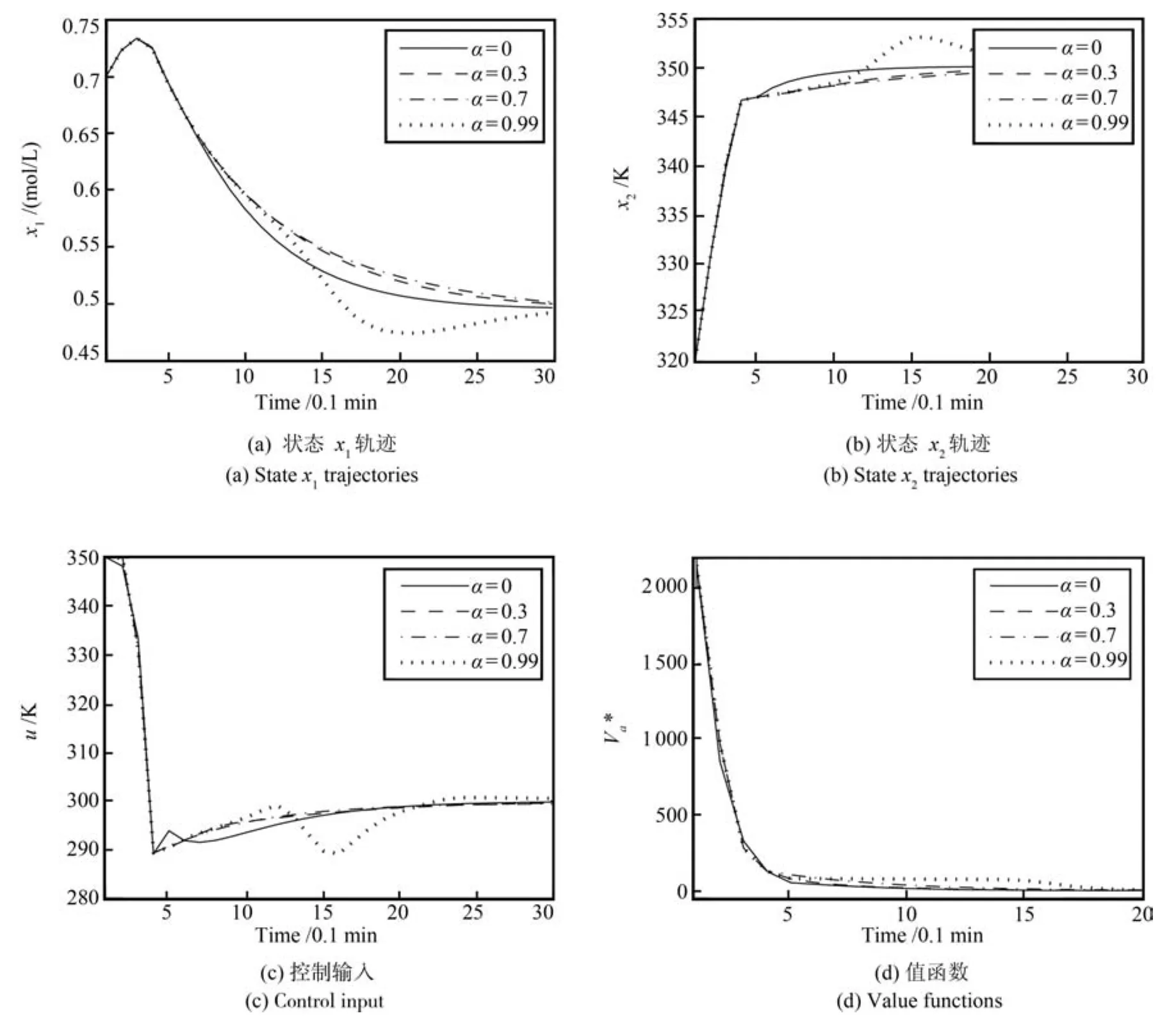
图1 状态轨迹、控制输入和值函数曲线Fig.1 Profiles of states,control and value functions
4.2 仿真实验二
为验证本文控制策略的优越性,对比文献[6]等提出耗散EMPC策略(简记为D-EMPC)和目标跟踪MPC策略(简记为T-MPC).由于T-MPC策略的性能函数总是设定值偏差的正定函数[1−2],因此在该次实验中,令正定函数(39)为T-MPC策略的性能函数.考虑初始状态(0.7 mol/L,320 K),图3给出了本文策略和其余两种策略在相同仿真环境下的控制结果.其中,实线表示本文策略(α=0.2)对应结果;点线表示D-MPC策略对应结果;虚线表示T-MPC策略对应结果;右下子图符号“*”表示性能理想点,“o”表示最优平衡点对应的经济性能.
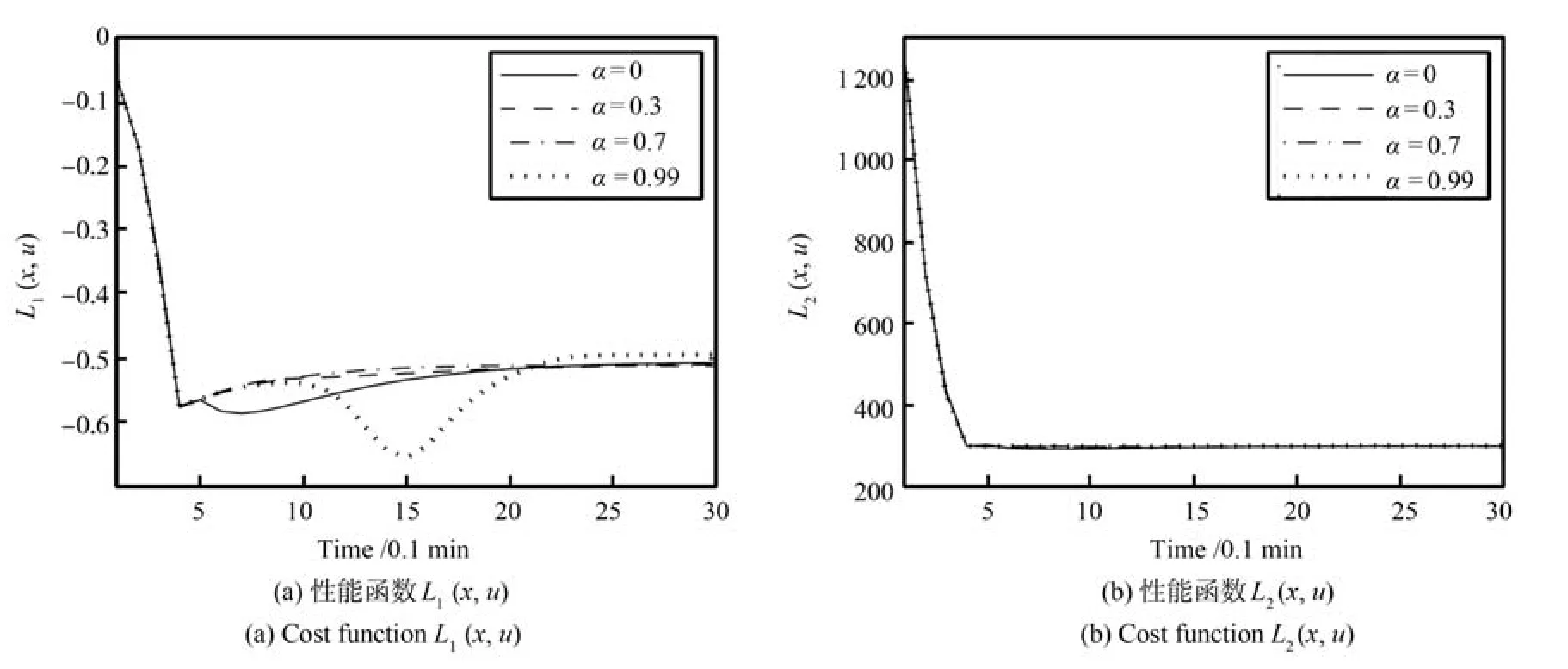
图2 性能函数实时曲线Fig.2 Real-time profiles of cost functions
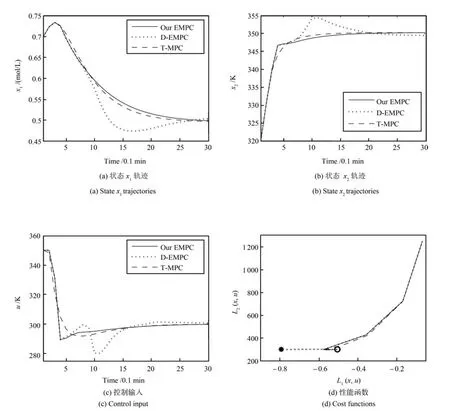
图3 状态轨迹、控制输入和性能函数相位曲线Fig.3 Profiles of states,control,and cost functions
由图3分析可知,本文策略和T-MPC策略对应的闭环系统渐近收敛至而D-MPC策略对应的闭环系统在暂态响应过程中出现震荡现象(如控制输入u),同时存在稳态误差(如反应器温度x2),这主要是因为D-EMPC策略要求被控系统和经济性能函数满足严格耗散性条件.但对于非线性系统,严格耗散性条件很难成立[5],如本例中的聚合过程(34)和经济性能(38)不满足严格耗散性条件,从而D-EMPC策略不能保证闭环系统收敛至对应的性能相位曲线也不能收敛至最优平衡点对应的经济性能“o”,如图3右下子图点线所示.另一方面,尽管本文策略和T-MPC策略的闭环系统都收敛至但收敛路径不一样.如果以进入稳态解±5%为界,那么本文策略对应闭环系统的收敛过渡时间小于T-MPC策略闭环系统的收敛过渡时间,从而加快闭环系统的过渡响应过程.
令Av{L1}和Av{L2}分别表示性能函数(36)和(37)的渐近平均性能,则进一步比较三种策略取得的渐近平均性能.取足够大的仿真时间步长100,图4和表1分别给出了三种策略关于性能函数(36)和(37)的瞬时性能和渐近平均性能.图4中实线为本文策略对应的结果;点线为D-MPC策略对应的结果;虚线表示T-MPC策略对应结果.由图4分析可知,对于本文策略和T-MPC策略取得的平均性能较优于D-MPC策略;对于三种策略取得的平均性能较为接近.进一步,以D-MPC策略取得的渐近平均性能值作为参考基准,对于本文策略和T-MPC策略分别增效1.52%和1.69%;对于本文策略和T-MPC策略分别增效0.34%和0.27%.综合图3和4和表1结果,验证了本文策略在性能优化方面的优越性.
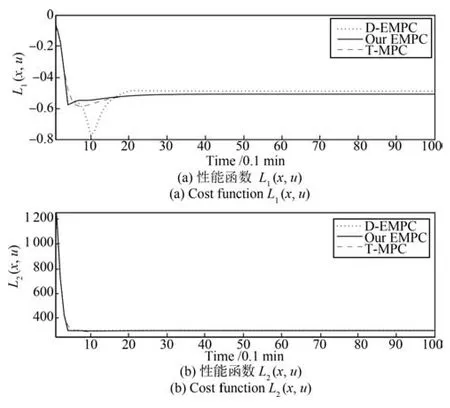
图4 性能函数的瞬时值曲线Fig.4 Real-time value profiles of cost functions
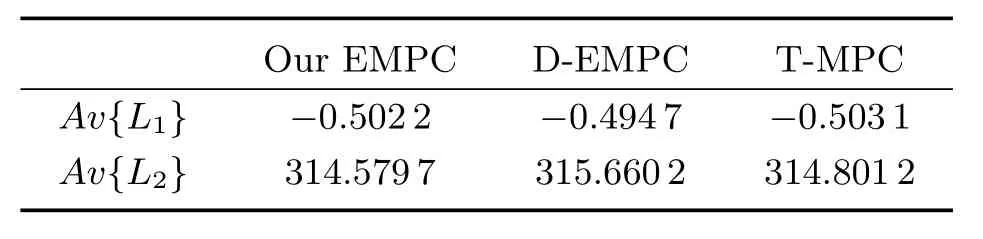
表1 渐近平均性能Table 1 Asymptotic average performance
5 结语
本文针对约束非线性系统,提出了一种新的稳定经济MPC策略.通过引入关于经济最优平衡点的辅助正定函数,并利用辅助函数的最优值函数定义原始EMPC优化问题的一类稳定性约束.应用常规MPC的终端约束集、终端代价函数和局部控制器三要素方法,建立了闭环系统关于经济最优平衡点渐近稳定性和渐近平均性能的充分条件.结合多目标理想点法,将提出EMPC策略推广至多经济目标函数优化控制问题.建立了多目标EMPC策略的渐近稳定性充分条件.通过对连续搅拌反应器多目标优化控制的对比研究,验证了本文结果的有效性.
1 Ellis M,Durand H,Christofides P D.A tutorial review of economic model predictive control methods.Journal of Process Control,2014,24(8):1156−1178
2 Tran T,Ling K V,Maciejowski J M.Economic model predictive control—a review.In:Proceedings of the 31st International Symposium on Automation and Robotics in Construction.Sydney,Australia:IAARC,2014.35−42
3 Mayne D Q.Model predictive control:recent developments and future promise.Automatica,2014,50(12):2967−2986
4 Angeli D,Amrit R,Rawlings J B.On average performance and stability of economic model predictive control. IEEE Transactions on Automatic Control,2012,57(7): 1615−1626
5 Diehl M,Amrit R,Rawlings J B.A Lyapunov function for economic optimizing model predictive control.IEEE Transactions on Automatic Control,2011,56(3):703−707
6 Amrit R,Rawlings J B,Angeli D.Economic optimization using model predictive control with a terminal cost.Annual Reviews in Control,2011,35(2):178−186
7 Fagiano L,Teel A R.Generalized terminal state constraint for model predictive control.Automatica,2013,49(9): 2622−2631
8 Ferramosca A,Limon D,Camacho E F.Economic MPC fora changing economiccriterion forlinearsystems. IEEE Transactions on Automatic Control,2014,59(10): 2657−2667
9 Huang R,Harinath E,Biegler L T.Lyapunov stability of economically oriented NMPC for cyclic processes.Journal of Process Control,2011,21(4):501−509
10 Chu B,Duncan S,Papachristodoulou A,Hepburn C.Using economic model predictive control to design sustainable policies for mitigating climate change.In:Proceedings of the 51st IEEE Conference on Decision and Control.Maui, HI:IEEE,2012.406−411
11 Hovgaard T G,Larsen L F S,Jørgensen J B.Flexible and cost efficient power consumption using economic MPC a supermarket refrigeration benchmark.In:Proceedings of the 50th IEEE Conference on Decision and Control and European Control Conference.Orlando,FL:IEEE,2011. 848−854
12 Ma W J,Gupta V.Desynchronization of thermally-coupled first-order systems using economic model predictive control. In:Proceedings of the 51st IEEE Conference on Decision and Control.Maui,HI:IEEE,2012.278−283
13 Lao L F,Ellis M,Christofides P D.Economic model predictive control of parabolic PDE systems:addressing state estimation and computational efficiency.Journal of Process Control,2014,24(4):448−462
14 Lao L F,Ellis M,Christofides P D.Smart manufacturing: handling preventive actuator maintenance and economics using model predictive control.AIChE Journal,2014,60(6): 2179−2196
15 Lao L F,Ellis M,Christofides P D.Economic model predictive control of transport-reaction processes.Industrial& Engineering Chemistry Research,2014,53(18):7382−7396
17 Rawlings J B,Angeli D,Bates C N.Fundamentals of economic model predictive control.In:Proceedings of the 51st IEEE Conference on Decision and Control.Maui,HI:IEEE, 2012.3851−3861
19 Heidarinejad M,Liu J F,Christofides P D.Economic model predictive control of nonlinear process systems using Lyapunov techniques.AIChE Journal,2012,58(3):855−870
20 Ellis M,Christofides P D.On finite-time and infinite-time cost improvement of economic model predictive control for nonlinear systems.Automatica,2014,50(10):2561−2569
21 Maree J P,Imsland L.On multi-objective economic predictive control of cyclic process operation.Journal of Process Control,2014,24(8):1328−1336
22 Vallerio M,van Impe J,Logist F.Tuning of NMPC controllers via multi-objective optimisation.Computers and Chemical Engineering,2014,61(11):38−50
23 Pan Hong-Guang,Gao Hai-Nan,Sun Yao,Zhang Ying, Ding Bao-Cang.The algorithm and software implementation for double-layered model predictive control based on multi-priority rank steady-state optimization.Acta Automatica Sinica,2014,40(3):405−414 (潘红光,高海南,孙耀,张英,丁宝苍.基于多优先级稳态优化的双层结构预测控制算法及软件实现.自动化学报,2014,40(3): 405−414)
24 Bemporad A,de la Pea D M.Multiobjective model predictive control.Automatica,2009,45(12):2823−2830
25 Zou Tao,Wang Xi,Li Shao-Yuan.Multi-model predictive control for nonlinear systems based on mixed logic.Acta Automatica Sinica,2007,33(2):188−192 (邹涛,王昕,李少远.基于混合逻辑的非线性系统多模型预测控制.自动化学报,2007,33(2):188−192)
26 Wang H Y,Huang D X,Jin Y H.A hybrid model predictive control for handling infeasibility and constraint prioritization.Chinese Journal of Chemical Engineering,2005,13(2): 211−217
27 Tyler M L,Morari M.Propositional logic in control and monitoring problems.Automatica,1999,35(4):565−582
28 He De-Feng,Song Xiu-Lan,Huang Hua.Stabilizing constrained model predictive control with prioritized multiobjectives.Control and Decision,2013,28(12):1831−1836 (何德峰,宋秀兰,黄骅.优先级多目标稳定化约束模型预测控制.控制与决策,2013,28(12):1831−1836)
29 He D F,Wang L,Sun J.On stability of multiobjective NMPC with objective prioritization.Automatica,2015,57: 189−198
30 Ocampo-Martinez C,Ingimundarson A,Puig V,Quevedo J.Objective prioritization using lexicographic minimizers for MPC of sewer networks.IEEE Transactions on Control Systems Technology,2008,16(1):113−121
31 Zavala V M,Flores-Tlacuahuac A.Stability of multiobjective predictive control:a utopia-tracking approach.Automatica,2012,48(10):2627−2632
32 He D F,Wang L,Yu L.Multi-objective nonlinear predictive control of process systems:a dual-mode tracking control approach.Journal of Process Control,2015,25(3):142−151
34 Yu Shu-You,Chen Hong,Zhang Peng,Li Xue-Jun.An LMI optimization approach for enlarging the terminal region of MPC for nonlinear systems.Acta Automatica Sinica,2008, 34(7):798−804 (于树友,陈虹,张鹏,李学军.一种基于LMI的非线性模型预测控制终端域优化方法.自动化学报,2008,34(7):798−804)
35 He D F,Yu L,Song X L.Optimized-based stabilization of constrained nonlinear systems:a receding horizon approach. Asian Journal of Control,2014,16(6):1693−1701
36 Xi Yu-Geng,Li De-Wei.Fundamental philosophy and status of qualitative synthesis of model predictive control.Acta Automatica Sinica,2008,34(10):1225−1234 (席裕庚,李德伟.预测控制定性综合理论的基本思路和研究现状.自动化学报,2008,34(10):1225−1234)
37 He De-Feng,Ding Bao-Cang,Yu Shu-You.Review of fundamental properties and topics of model predictive control for nonlinear systems.Control Theory and Applications,2013, 30(3):273−287 (何德峰,丁宝苍,于树友.非线性系统模型预测控制若干基本特点与主题回顾.控制理论与应用,2013,30(3):273−287)
38 Mhaskar P,El-Farra N H,Christofides P D.Stabilization of nonlinear systems with state and control constraints using Lyapunov-based predictive control.System&Control Letters,2006,55(8):650−659
39 Xu Jiu-Ping,Li Jun.Multiple Objective Decision Making Theory and Methods.Beijing:Tsinghua University Press, 2005. (徐玖平,李军.多目标决策的理论与方法.北京:清华大学出版社, 2005.)

何德峰 浙江工业大学信息工程学院教授.2008年获得中国科学技术大学自动化系博士学位.主要研究方向为鲁棒与预测控制.
E-mail:hdfzj@zjut.edu.cn
(HE De-Feng Professor at the College of Information Engineering,Zhejiang University of Technology.He received his Ph.D.degree from the Department of Automation,University of Science and Technology of China in 2008.His research interest covers robust and predictive control.)
Stabilizing Economic Model Predictive Control of Constrained Nonlinear Systems
HE De-Feng1
This paper proposes a novelty economic model predictive control(EMPC)scheme with guaranteed stability for constrained nonlinear systems.Some auxiliary positive-definite functions at economy optimal equilibrium points are introduced for economic performance functions that are generally non-convex and non-positive-definite.The optimal value function of the auxiliary function is used to define an adjustable stability constraint which is imposed on the original EMPC optimization problem.By the triplet of terminal constrained sets,terminal penalty functions and local controllers, it is proved that the closed-loop system is asymptotically stable at the economically optimal equilibrium point and has an asymptotic average performance.Moreover,the proposed EMPC scheme is extended to optimization control of multiple economic performance functions,together with the concept of multi-objective utopia points.Then a stabilizing multiobjective EMPC scheme is presented.Finally,the effectiveness of the obtained results is illustrated by a simulation example of a continuously stirred tank reactor.
Model predictive control(MPC),nonlinear systems,economic optimization,stability,multi-objective control Citation He De-Feng.Stabilizing economic model predictive control of constrained nonlinear systems.Acta Automatica Sinica,2016,42(11):1680−1690
何德峰.约束非线性系统稳定经济模型预测控制.自动化学报,2016,42(11):1680−1690
2015-04-20 录用日期2016-06-30
Manuscript received April 20,2015;accepted June 30,2016
国家自然科学基金(61374111),浙江省公益技术应用研究计划项目(2015C31057)资助
Supported by National Natural Science Foundation of China (61374111),Public Welfare Technology Application Research Project of Zhejiang Province(2015C31057)
本文责任编委乔俊飞
Recommended by Associate Editor QIAO Jun-Fei
1.浙江工业大学信息工程学院杭州310023
1.College of Information Engineering,Zhejiang University of Technology,Hangzhou 310023
DOI 10.16383/j.aas.2016.c150234
