船用温湿度传感器的温度特性研究*
2016-12-15孙佳,邹靖,胡桐,成文
孙 佳,邹 靖,胡 桐,成 文
(山东省海洋环境监测技术重点实验室,山东省科学院海洋仪器仪表研究所,国家海洋监测设备工程技术研究中心,山东青岛266001)
船用温湿度传感器的温度特性研究*
孙 佳*,邹 靖,胡 桐,成 文
(山东省海洋环境监测技术重点实验室,山东省科学院海洋仪器仪表研究所,国家海洋监测设备工程技术研究中心,山东青岛266001)
引起温湿度传感器测量误差的主要因素是背景噪声和传感器放大电路温漂,为了降低温湿度传感器的测量误差,通过设置滤波器并采用信号叠加方法抑制背景噪声;采用数据拟合技术确定放大电路温度特性,建立温度补偿模型编写温度校正软件并对放大电路温漂进行补偿。试验结果表明,温度补偿后的温湿度传感器测量精度得到明显提高。
温湿度传感器;温度特性;温度补偿;放大电路温漂
在海洋调查规范中规定,气象观测项目主要有空气温度、相对湿度等气象要素[1]。可见,气温和相对湿度是气象观测要素中非常重要的气象参数[2]。
目前,测量气温的仪器主要有干球温度表和铂电阻温度传感器,但这两种传感器都是根据物理特性制成,且传感器机械结构复杂,没有针对传感器的温度补偿措施或补偿方法[2-6];测量相对湿度的仪器主要有通风干湿表和湿敏电容湿度传感器。其中,通风干湿表是利用机械装置使温度表球部处于恒定速度的气流中以获得测量数据,机械部件多且易故障,不存在温度补偿措施[7];湿敏电容湿度传感器是通过有机高分子膜制作的一种小型电容器,同样没有针对传感器的温度补偿措施或补偿方法[8]。
船舶气象观测设备中应用的温湿度传感器中的温湿度敏感元件感知环境的温度和相对湿度,输出微弱的直流电信号,该微弱的电信号经过放大电路放大后输出温湿度测量信号[9-13]。在实际使用中,国内外的温度传感器和相对湿度传感器是分开的,温度传感器是通过铂电阻设计温度转换电路进行温度测量;相对湿度传感器是湿敏电容,电信号的处理电路复杂,没有针对转换电路的温度补偿措施[14-16]。鉴于以上因素,导致现在船用温湿度传感器的温度测量精度最高为±0.5℃,相对湿度测量精度最高为±5%RH,无法满足新型船舶气象观测设备对温度和相对湿度更高技术指标的要求。
为解决现有温湿度传感器存在的问题,提高船用温湿度传感器的技术指标及可靠性,本文对船用温湿度传感器的温度特性进行研究,针对引起温湿度传感器测量误差的主要因素:背景噪声和传感器放大电路温漂,提出一种船用温湿度传感器的温度补偿方法,通过设置滤波器和信号叠加的方法抑制背景噪声;通过试验数据拟合技术,确定放大电路的温度特性,建立温度补偿模型对放大电路的温漂进行补偿,降低温湿度传感器的测量误差,提高测量的准确性。
1 技术设计
船用温湿度传感器温度特性的研究主要包括:敏感元件微弱信号提取放大电路、放大电路温度特性的确定以及温度补偿方法的确定。敏感元件微弱信号提取放大电路包括直流斩波器、低噪声前置放大器、带通滤波器、交流放大器、移相器、驱动电路、乘法器、积分器及直流放大器等部分;放大电路温度特性的确定包括随机的3组放大电路置于恒温恒湿试验机内进行温度等间隔递增变化,记录3组放大电路的数据并进行数据处理,得到放大电路温度特性曲线;温度补偿方法包括通过温度特性曲线,结合转换电路中电压-温度转换系数和电压-相对湿度转换系数,建立温度(相对湿度)误差值与环境温度变化的映射关系方程,即放大电路温度补偿方法。
1.1 微弱信号提取放大电路设计
温湿度传感器敏感元件输出的微弱信号是直流电信号,该信号中包含有效信号和噪声信号,在时域中很难将有效信号从噪声中分离出来,因此需要将时域信号转换成频率信号,再进行处理。
微弱信号提取放大电路设计包括直流斩波器、低噪声前置放大器、带通滤波器、交流放大器、移相器、驱动电路、乘法器、积分器及直流放大器等部分,如图1所示。直流斩波器将恒定的直流信号转换成周期性变化的信号,该信号分为2路,分别进入信息通道和参考通道;信息通道中,信号经过两级放大和带通滤波器,滤除了远离有效信号频段的部分噪声;参考通道中,信号产生了恒定相移;乘法器对信息信号和参考信号进行自相关运算,由于噪声的自相关函数接近于0,所以经过乘法器后信号的信噪比大幅提高,再经过积分器和直流放大器,最后输出易于测量的直流电压信号。

图1 放大电路设计框图
1.2 确定放大电路温度特性
通过电阻箱和惠斯通电桥电路产生与温湿度传感器敏感元件输出一致的微弱电压信号,将此微弱电压信号作为放大电路的输入信号。将放大电路置于恒温恒湿试验机内,恒温恒湿试验机内温度从-50℃~50℃之间以10℃的温度等间隔递增变化,依次记录放大电路的输出值。为避免放大电路的个体差异性,选取同样电路配置的3组放大电路进行试验,分别标记为1#、2#、3#,试验流程示意图如图2所示。

图2 温度特性试验流程图
试验结束后,对记录的试验数据进行分类,将1#放大电路的同一输入值对应的输出值归为1组,共11组,绘制1#放大电路在相同输入的情况下,输出值随环境温度变化的曲线,如图3和图4所示。

图3 1#放大电路输出值随温度变化曲线

图4 电阻设定100 Ω时放大电路输出值随温度变化曲线
用11组测量输出值分别与对应理论输出值相比较(理论输出值是针对不同输入值,放大电路的输出值),输出偏差如图5所示。从图5中可以看出,偏差值随环境温度的变化而逐渐变化。比较不同输入值对应的11组输出偏差曲线,发现其变化趋势是一致的。11组输出偏差曲线内包含的这种规律性偏差正是由放大电路的温漂造成的。将11组输出偏差曲线进行积分叠加,从中分离出由于放大电路温漂引起的输出偏差,如图6中“○”所示。采用最小二乘法拟合,得到1#放大电路的温度特性方程(1),拟合误差为0.4 mV(RMS),其特性曲线如图6所示。

式中:ΔV为放大电路输出电压偏差值,T为环境温度。

图5 输出偏差值随环境温度变化曲线
采用相同的数据处理方法,绘制出2#放大电路在相同输入的情况下,输出值随环境温度变化的曲线,如图7所示。用11组测量输出值分别与对应理论输出值相比较,输出偏差如图8所示。从图中可以看出,偏差值随环境温度的变化而逐渐变化。比较不同输入值对应的11组输出偏差曲线,发现其变化趋势是一致的。这一现象与1#放大电路类似。将11组输出偏差曲线进行积分叠加,从中分离出由于放大电路温漂引起的输出偏差,如图9中“□”所示。采用最小二乘法拟合,得到2#放大电路的温度特性方程(2),拟合误差为0.5 mV(RMS),其特性曲线如图9所示。

图6 1#放大电路的温度特性曲线

图7 2#放大电路输出值随温度变化曲线

图8 输出偏差值随环境温度变化曲线
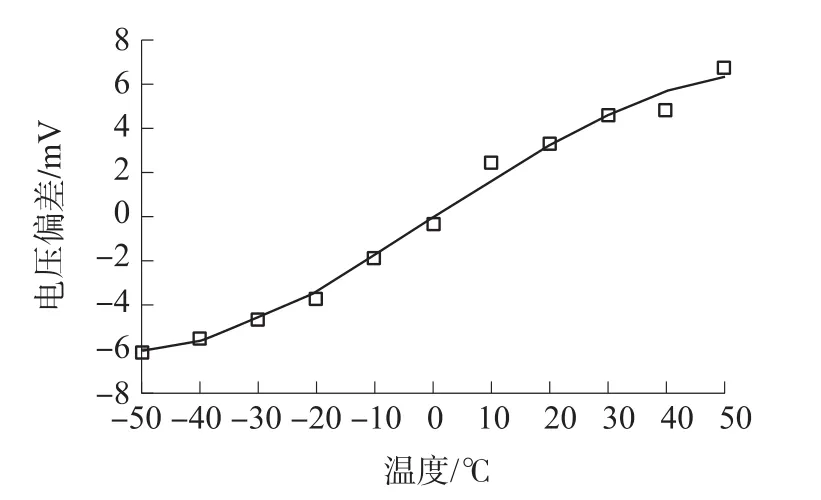
图9 2#放大电路的温度特性曲线

式中:ΔV为放大电路输出电压偏差值,T为环境温度。
采用相同的数据处理方法,绘制出3#放大电路在相同输入的情况下,输出值随环境温度变化的曲线,如图10所示。用11组测量输出值分别与对应理论输出值相比较,输出偏差如图11所示。从图中可以看出,偏差值随环境温度的变化而逐渐变化。比较不同输入值对应的11组输出偏差曲线,发现其变化趋势是一致的。这一现象与1#和2#放大电路类似。将11组输出偏差曲线进行积分叠加,从中分离出由于放大电路温漂引起的输出偏差,如图12中“*”所示。采用最小二乘法拟合,得到3#放大电路的温度特性方程(3),拟合误差为0.6 mV(RMS),其特性曲线如图12所示。

图10 3#放大电路输出值随温度变化曲线

图11 输出偏差值随环境温度变化曲线

图12 3#放大电路的温度特性曲线

式中:ΔV为放大电路输出电压偏差值,T为环境温度。
1.3 建立温度补偿模型
通过数学模型对得到的温度特性进行描述,通过温度补偿技术,对放大电路温漂引起的误差进行补偿,建立温度补偿模型,流程示意图如图13所示。

图13 温度补偿模型的建立流程示意图
采用回归分析方法,对1#、2#、3#放大电路的温度特性曲线进行重新拟合,得到放大电路的复合温度特性曲线,如图14所示。其拟合误差为5.1 mV(RMS),拟合方程为:

式中:ΔV为放大电路输出电压偏差值,T为环境温度。

图14 复合温度特性曲线
根据拟合方程(4)可知,环境温度变化导致的放大电路输出电压产生偏差范围是-5.6 mV~6.2 mV。
放大电路输出电压经过AD转换计算后,得到相应的温度和相对湿度值.根据设计,电压-温度转换系数 σT=31.25(℃/V),电压-湿度转换系数σRH=31.25(%RH/V)。当温湿度传感器测得的环境温度为T时,放大电路温漂引起的电压偏差转换成温度误差ΔT和湿度误差ΔRH表示为

设补偿后的温度和相对湿度分别为T′和RH′,则有

综上所述,温湿度传感器温度补偿方程为:

2 原理样机设计
2.1 硬件设计
为验证温度补偿方法的效果,制作3台温湿度传感器原理样机,对经过温度补偿的温湿度传感器原理样机进行试验验证。原理样机的硬件电路中选用高新能、低功耗、可编程AVR处理器,其内置8路16 bit的高速A/D转换器,微弱电压信号经过放大电路处理后,进入到AVR处理器中,通过A/D转换器采集后转换成数字信号输出。原理框图如图15所示。

图15 硬件设计原理框图
2.2 软件设计
程序流程示意图如图16所示。

图16 程序流程示意图
3 验证试验
验证试验均在山东省海洋环境监测技术重点实验室的恒温恒湿试验机中进行,如图17所示。验证试验选取了2套经过温度补偿的温湿度传感器标记为4#、5#以及1套未经温度补偿的传感器标记为6#,试验数据如表1~表6所示。

图17 验证试验设备

表1 4#温湿度传感器的温度试验结果 单位:℃

表2 4#温湿度传感器的相对湿度试验结果 单位:%RH

表3 5#温湿度传感器的温度试验结果 单位:℃

表4 5#温湿度传感器的相对湿度试验结果 单位:%RH

表5 6#温湿度传感器的温度试验结果 单位:℃

表6 6#温湿度传感器的相对湿度试验结果 单位:%RH
试验结果表明:经过温度补偿的温湿度传感器温度测量最大误差为0.2℃,相对湿度测量最大误差为1.3%RH;未经温度补偿的温湿度传感器温度测量最大误差为0.5℃,相对湿度测量最大误差为2.5%RH,由此可知,经过温度补偿的温湿度传感器的测量精度远优于现在船用的、未经补偿的温湿度传感器的测量精度,并且该温湿度传感器进行了陆试和海试,如图18所示。并配备有专用百叶箱,环境适应性好,可靠性高。

图18 海试环境
4 结论
论文详细阐述背景噪声和传感器放大电路温漂对温湿度传感器测量精度的影响,通过温度试验采用数据拟合技术,确定温湿度传感器放大电路的温度特性,对放大电路的温漂进行补偿,降低温湿度传感器的测量误差,提高测量的准确性,研制了温湿度传感器原理样机,并进行了陆试和海试,完全可以满足港口、岸站、舰船等海洋环境的气象观测要求。
[1]中国国家标准化管理委员会.GB/T 12763.3—2007海洋调查规范第3部分:海洋气象观测[S].北京:中国标准出版社,2007.
[2]刘涛,漆随平,王洋,等.船舶气象仪电磁兼容性试验及分析[J].机械管理开发,2010,16(6):37-38.
[3]黄强,滕召胜,唐享,等.电子分析天平温度漂移补偿算法研究[J].仪器仪表学报,2015,36(9):87-95.
[4]侯立群,赵雪峰,冷志鹏.光纤光栅应变传感器温度补偿计算值的改进[J].传感技术学报,2014,27(1):70-73.
[5]贾桂文,张景川,陈德旺.基于BIC准则模型选择的光纤光栅波长温度拟合研究[J].传感技术学报,2014,27(2):217-221.
[6]行鸿彦,邹水平,徐伟.基于PSO-BP神经网络的湿度传感器温度补偿[J].传感技术学报,2015,28(6):864-869.
[7]邵仙鹤,鲁志成,王翥.基于最小二乘曲面拟合的流量计量温度补偿算法[J].传感技术学报,2016,29(6):897-902.
[8]叶永伟,陆俊杰,钱志勤,等.基于LS-SVM的机械式温度仪表误差预测研究[J].仪器仪表学报,2016,31(1):57-66.
[9]简弃非,刘海燕.SnO2纳米传感器的灵敏度温度特性曲线拟合研究[J].传感技术学报,2005,18(1):236-240.
[10]Qing Xiuwu,Guo Fangzhang,Li Liyan.Temperature and Humidi⁃ty Sensor Research Based on Monobus Technology[C]//Proceed⁃ings of 2015 4th National Conference on Electrical,Electronics and Computer Engineering(NCEECE 2015),2015:156-162.
[11]陈敏,马丽.传感器特性曲线的一种拟合方法[J].传感器技术,2003,15(1):124-129.
[12]孙德敏,张利,王永,等.基于乘积型最小二乘法的传感器特性拟合[J].传感技术学报,2002,15(4):203-207.
[13]Gao Zhiqiu,Bian Lirigen.Turbulent Variance Characteristics of Temperature and Humidity over a Non-Uniform Land Surface for an Agricultural Ecosystem in China[J].Advances in Atmospheric Sciences,2006,30(6):210-216.
[14]李德胜,赵新民.一种传感器非线性反函数校正方法[J].仪器仪表学报,1991,16(2):145-149.
[15]曾喆昭,李仁发.高阶多通带滤波器优化设计研究[J].电子学报,2002,22(1):23-27.
[16]孙以材,陈志永,王静.传感器与固体电子学中非线性函数多项式拟合的规范化[J].电子器件,2004,27(1):65-69.

孙 佳(1983-),男,2007年于佳木斯大学获得学士学位,2010年于哈尔滨工程大学获得硕士学位,现为山东省科学院海洋仪器仪表研究所工程师,主要研究方向为海洋仪器仪表及自动控制,sunjia0502@163.com;

邹 靖(1986-),男,2008年于河海大学获得学士学位,2013年于中国科学院大气物理研究所获得博士学位,现为山东省科学院海洋仪器仪表研究所副研究员,主要研究方向为海气耦合数值模拟,zoujing6323659@126.com。
The Research of Marine Temperature and Humidity Sensor Temperature Characteristic*
SUN Jia*,ZOU Jing,HU Tong,CHENG Wen
(Shandong Provincial Key Laboratory of Ocean Environmental Monitoring Technology,Institute of Oceanographic Instrumentation Shandong Academy of Sciences,National Engineering and Technological Research Center of Marine Monitoring Equipment,Qingdao Shandong 266001,China)
According to the background noise and the temperature drift of sensor amplifier circuit are the main factors causing the measurement error of the temperature and humidity sensor,it is proposed to suppress the back⁃ground noise by setting up the filter and using the signal superposition method;the temperature characteristic of amplifier circuit is determined by data fitting technique,the temperature compensation model is established,write temperature calibration software and the temperature drift of the amplifier circuit is compensated.The experiment results show that the measurement accuracy of the temperature and humidity sensor after temperature compensation is significantly improved.
temperature and humidity sensor;temperature characteristic;temperature compensation;amplifier circuit temperature drift
TH765
A
1004-1699(2016)11-1666-07
EEACC:7230 10.3969/j.issn.1004-1699.2016.11.007
项目来源:山东省科学院青年科学基金项目(2014QN034,2014QN035)
2016-05-10 修改日期:2016-06-28