爬壁机器人防仰防溜研究*
2016-12-15袁晓洲朱志强
袁晓洲,朱志强
(江西铜业集团公司贵溪冶炼厂,江西 鹰潭 335424)
爬壁机器人防仰防溜研究*
袁晓洲,朱志强
(江西铜业集团公司贵溪冶炼厂,江西 鹰潭 335424)
爬壁机器人在高楼救援、侦察、幕墙清洗等危险性工作中应用非常广泛。但面临着很多技术性的难题,如壁虎脚吸盘自动吸附和自动解除吸附的问题、履带式吸盘机器人无法小半径转弯的难题、机器人在前进过程中车身前端后仰的问题、机器人在前进过程中车身侧滑的问题、机器人溜车的问题、机器人爬壁时越障和越沟槽的问题等。文章重点研究爬壁机器人爬升时车身前端后仰和下降时溜车问题。
履带式机器人;爬壁;防后仰;防下溜
21 世纪以来,国内外对机器人技术的发展越来越重视。机器人技术被认为是对未来新兴产业发展具有重要意义的高技术之一。欧盟在第七框架计划(FP7)中规划了“认知系统与机器人技术”研究、美国启动了“美国国家机器人计划”、日本、韩国在服务型机器人方面也制定了相应的研究计划[1],我国在国家高技术研究发展计划(863计划)、国家自然科学基金、国家科技重大专项等规划中对机器人技术研究给予极大的重视。国内外产业界对机器人技术引领未来产业发展也寄予厚。由此可见,机器人技术是未来高技术、新兴产业发展的基础之一,对于国民经济和国防建设具有重要意义[2]。
近年来,机器人技术研究与应用取得了突破式进展,尤其是履带式移动机器人的研究和应用更为广泛。如欧洲航天局的固定履带式机器人 Nanokhod、美国 iRobot 公司生产的 Packbot 系列机器人[3]、本千叶工业大学研制的搜救机器人“木槿”[4]等,主要运用在恶劣环境之中,有较强的爬坡、越障和跨沟能力。随着高楼林立,高楼救援、侦察、幕墙清洗等危险性工作需要机器人来代替。爬壁机器人的研究开始受到重视,但面临着很多技术性的难题,如壁虎脚吸盘自动吸附和自动解除吸附的问题、履带式吸盘机器人无法小半径转弯的难题、机器人在前进过程中车身前端后仰的问题、机器人在前进过程中车身侧滑的问题、机器人溜车的问题、机器人爬壁时越障和越沟槽的问题等。文章重点研究爬壁机器人爬升时车身前端后仰和下降时溜车问题。
1 履带式爬壁机器人机械结构设计
履带式爬壁机器人机械结构三维总装如图1所示。履带式爬壁机器人主要由动力装置,传动装置,执行装置及辅助部分(链条链轮,齿轮转动,离合器,推力轴承等)等组成。爬动前,小吸盘吸附壁面,动力装置通过链轮带动固定在链条之间的小吸盘运动,与主轴相连的摩擦片之间产生的摩擦力通过连杆传递给前轴,以使机器人与壁面受力均匀,机器人平稳向上爬动。当爬行到既定的距离需要转弯时,主电机停止转动,启动辅助电机,由辅助电机转轴相连的蜗杆带动涡轮轴上的大凸轮向内推动大吸盘,使大吸盘接触壁面,大凸轮转过一定角度后,凸槽拨动拨杆,大吸盘吸住壁面。此时,拉簧向外拉开小吸盘拨杆挡块,在弹簧的拉力作用下,拨杆弹开,小吸盘对壁面的吸附力消除。转轴继续转动,与轴相连的锥齿轮带动演变的卡当机构,该机构带动机器人转弯。转弯动作完成后,小凸轮向内推动小吸盘挡块,挡块拨动其拨杆,小吸盘吸附在壁面上,大吸盘在拉簧的回复拉力作用下脱离壁面,然后主电机启动,至此机器人即可按照转过的角度继续爬行。向下返程时,主电机主轴反转,在离合器的作用下,主轴上的摩擦片不产生相对运动,前后轴间的作用力失效,从而机器人可实现安全平稳的上下爬行和转弯的全能运动。
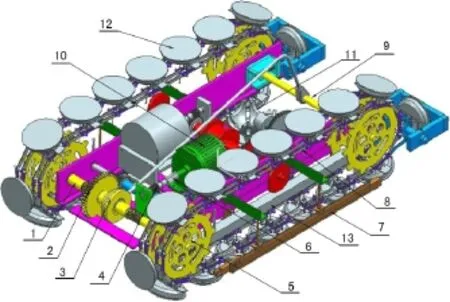
图1 履带式爬壁机器人机械结构三维总装图
2 履带式爬壁机器人车身前端防后仰技术方案
具体技术方案如图2所示。向上匀速运动时。运用摩擦力恒定打滑原理,当小车开始运动时利用单向轴承6的单向超越性使主动摩擦片5与主动轴8的运动同步,带动从动摩擦片4作圆周运动,并将两摩擦片产生的摩擦力通过压杆7传到小车前端,从而防止车身后仰。通过调整调距螺母1调节弹簧2的弹簧力,进而可随意调节主从摩擦片间的传动摩擦力。

图2 防后仰装置
3 履带式爬壁机器人防溜车技术方案
当机器人向下运动时,在重力作用下车身会加速运动,使主动轴上的动力成为主动件,从图2机械结构可以看出,设计的传动机构可使机构向下加速运动时自动锁死,实现向下运动时的匀速,保持机构的稳定性,防止溜车事件的发生,使前端压杆压力自动失效。
4 履带式爬壁机器人性能分析
设计的该套装置,在光滑墙面上自由移动时,有很好的操作性和和安全可靠性。经实验利用手动装置的攀爬速度可达2m/s,机动装置可载人在倾角为0~360℃的范围内的光滑墙壁或玻璃上随意移动,移动速度可用控制器在0~10m/min之间随意调节,可承受最大负载80kg,可实现小半径转弯(转弯半径为车身长度的一半),并可轻松跨越20mm以内沟槽,且性能稳定,不会发生溜车事故。
[1]徐扬生.智能机器人引领高新技术发展[N].科学时报,2010-08-12.
[2]谭民,王硕.机器人技术研究进展[J].自动化学报.2013,(7).
[3]朱晓光.双足机器人步态与路径规划研究[D].华北电力大学,2012.
[4]吴大华.四足仿生机器人状态感知系统的软件设计与优化[D].中南大学,2013.
TP242.2
A
2096-2789(2016)11-0010-02
湖北省自然科学基金项目(2014CFC1060);湖北省教育科学“十二五”规划课题(2013B320)。
袁晓洲(1964-),男,湖北汉川人,教授,硕士,研究方向:机械工程与高等教育研究。
朱志强(1981-),男,河南周口人,硕士研究生,副教授,研究方向:机械工程研究。
