肘关节屈运动相关肌肉表面肌电信号研究*
2016-12-15何小耀韦宇炜何汉武王俊华曾科学
何小耀,韦宇炜,何汉武,王俊华,曾科学
(1.广东工业大学,广东 广州 510000;2.广东省第二中医院,广东 广州 510000)
肘关节屈运动相关肌肉表面肌电信号研究*
何小耀1,韦宇炜1,何汉武1,王俊华2,曾科学2
(1.广东工业大学,广东 广州 510000;2.广东省第二中医院,广东 广州 510000)
针对表面肌电控制对信号通道数和数据量的要求,文章以肘关节屈运动的角度识别为研究目标,通过对相关肌肉表面肌电信号进行去噪,提取特征值,建立表面肌电信号与关节运动角度的映射关系,旨在找出最能表征肘关节屈运动的肌肉。通过实验数据发现肱二头肌和肱桡肌用于肘关节屈运动角度识别的准确率更高。
表面肌电;肘关节屈;运动;角度;识别
我国人口众多,其中残疾人达到6千万之多,这其中,肢体残疾约占45%,而肢体残疾中,又以上肢残疾居多。传统的上肢康复训练方法是依靠专业的理疗医师对患者进行手把手的训练。对于这种病患,医师的辅助训练虽有一定的帮助,但是不会太理想,主要问题在于训练效率不高,操作过程带有医师的主观态度,康复评定标准无理论依据[1]。利用人体表面肌电信号(以下简称sEMG)控制外骨骼机器人,使用机器人的“体力”来带动患者做康复运动。这种方式不仅可以继承目前的康复模式和方法,还有可能彻底解决这些康复训练方法中存在的问题[2]。
用sEMG控制外骨骼康复训练,为了防止对患者造成二次伤害,对关节运动角度识别有较高的要求。为此,文章选取肘关节屈运动的角度识别为研究对象。肘关节的屈运动涉及到多组肌肉:肱二头肌、肱肌、肱桡肌、桡侧腕屈肌、和尺侧腕屈肌,利用多块肌肉的肌电信号表征肘关节运动,必将提高识别率。但这将使数据过于庞大,信号处理实时性降低。最重要的是,对于截肢患者,有时无法获得多块肌肉的sEMG,为此,期望能够找到最能表征肘关节屈运动的肌肉,仅利最少的肌肉信号实现角度识别。
文章通过采集肘关节屈运动相关肌肉的sEMG,对sEMG去噪,提取特征,利用BP神经网路建立sEMG与关节运动角度的关系,从而利用sEMG识别关节运动角度。通过分析不同肌肉sRMG对角度的识别率,来找出更能表征肘关节屈运动角度的肌肉,为识别肘关节屈运动肌肉的选择提供依据。
1 肌电信号的采集、去噪与特征提取
1.1 肌电信号的采集
肌电信号采集时,因表面肌电信号极其微弱, 其电压值在50μV~2000μV之间,其能量主要集中在10Hz-500Hz之间。采集电路需对信号进行放大、滤波,采集过程如图1所示。
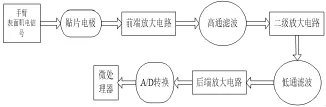
图1 sEMG信号流向图
1.2 小波去噪
采集到的sEMG仍旧含有大量噪声,需要做进一步去噪处理。小波变换是一种时间窗和频率窗都可以改变的视频分析方法,不仅能反应信号在全部频率上的整体时域特征,而且能提供频率段所对应的时间信息。此外,小波变换在高频段具有高的时间分辨率,低的频率分辨率;低频段具有高的频率分辨率,低的时间分辨率,其在时频域都有很强的局部特征表征力。因此,小波变换在非平稳信号的去噪以及特征提取领域有着十分广泛的应用[3-5]。表面肌电信号可以表示为:

其中s(i)为含有噪声的sEMG信号,x(i)为有用信号,e(i)为噪声信号。
通过对s(i)进行小波分解,由于噪声常包含在具有较高频率的细节中,因此通过选取一定的阈值对分解的得到的小波系数进行处理,然后再重构信号,即可达到消噪的目的。利用Matlab进行去噪处理,使用阈值去噪函数wden,采用sym8小波进行5层分解。肘关节5次伸屈运动、肱桡肌sEMG信号去噪前后的波形如图2所示。
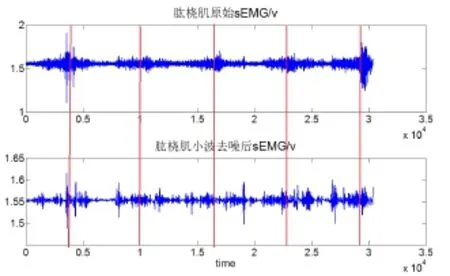
图2 去噪前后的肱桡肌信号
1.3 特征提取
sEMG是肌肉收缩时产生的电信号,为了建立sEMG与肘关节屈运动的映射关系,需从sEMG信号波形中选取影响肘关节运动的参数。相关文献[6-8]中介绍了肌电信号的相关特征值:为了提高抗噪能力,提取sEMG细节特征采用了基于自排序熵的特征值提取方法;为了获得分离度大的信号特征值,可以采用基于小波变换的方法。综合考虑,文章选取三个特征值:通过阈值的sEMG数据点数的百分比,sEMG均方根值,sEMG能量值。
(1)通过阈值的sEMG数据点数百分比。以平伸状态下的肌肉sEMG值为参考,选取其最大值,最小值为阈值,对屈运动状态下的sEMG进行阈值滤波,计算通过阈值的数据点数占数据的百分比。通过的数据点数越多,说明肌肉发力时间越长,能够在一定程度上反应肘关节的运动角度。
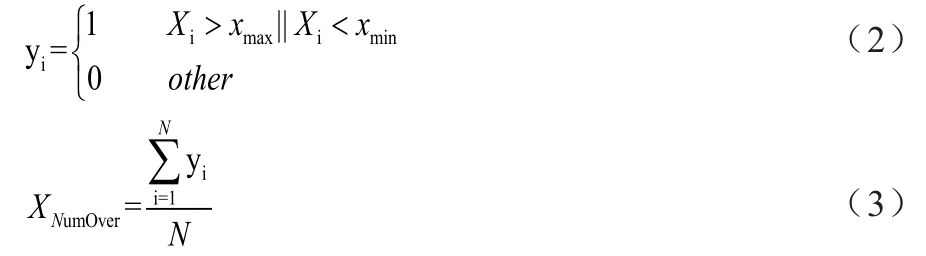
其中Xi为屈运动sEMG值,Xmax、Xmin为平伸状态下sEMG最大、最小值,yi表示是否通过阈值滤波,N表示采样点数,XNumOver表示通过阈值滤波占采样数的百分比。
(2)sEMG均方根值。EMG均方根值的大小同样是反应肌肉的活动变化,选取均方根值作为特征值之一。

XRMS表示sEMG的均方根值
(3)sEMG能量值。sENG的求取方法为通过对sEMG进行小波包分解,取相应的小波包系数的平方和即为能量值:

其中Ci为小波包分解的高维系数矩阵
如图3所示,采集到的肱桡肌sEMG的三个特征值与角度,其中数据来自10次肘关节屈运动。
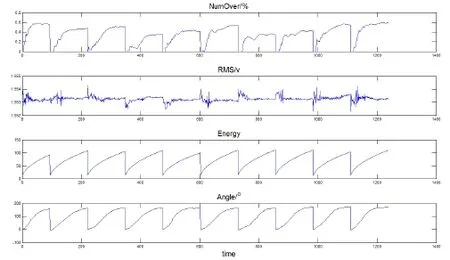
图3 肱桡肌sEMG的三个特征值与肘关节屈运动角度
2 肘关节屈运动角度定量辨识
2.1 BP神经网络设计
文章采用BP神经网络对样本数据进行训练建立sEMG与运动角度之间的关系[9-11],结构如图4所示。
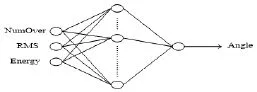
图4 BP网络结构
该BP网络共三层,输入成含有3个节点,输出层含有一个节点,对于隐含层节点数的确定,文章采用的确定方法为:

其中n为隐含层神经元数,nin为输入神经元数,nout为输出神经元数,a为1~10之间的常数。
经过不断的尝试,将n定位10得到的训练结果较好。
2.2 实验及结果
本实验招募6名志愿者,年龄在18~35岁之间,没有运动神经类疾病;在最近的6个月里,前臂没有出现扭伤、运动损伤、断裂等影响运动功能的伤病;最近两天没有进行过剧烈的运动;没有肌肉酸痛及不适;非敏感性皮肤。本次实验使用的器材有:sEMG、Agcl电极、角度采集仪等。
数据采集方法:Agcl电极贴于相关肌肉表面,测试者在无负重情况下,平缓的做肘关节屈运动,采集仪记录sEMG信号;角度采集仪放置与受试这段手臂处采集角度信息。每位受试者分别采集肱二头肌、肱桡肌、尺侧腕屈肌、桡侧腕屈肌,考虑到肱肌为深层肌,且大部分人该块肌肉不明显,因此文章暂不研究。每块肌肉采集25组数据,其中20组用于BP网络训练,5组用于测试预测结果。
为了保证采集过程的一致性,在采集每一块肌肉的sEMG信号时,应做相同的处理:用酒精擦拭相应皮肤,检测电极相隔距离一致,参考电极位置不变等。利用上文中方法求取肌肉各组sEMG的特征值与对应的角度信息,并定义后好BP神经网络,分别对采集的20组数据进行训练。用5组测试数据测试预测结果,其中一位受试者的预测结果如图5所示。
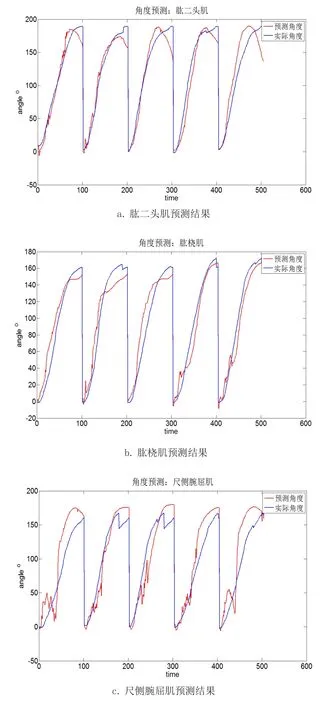
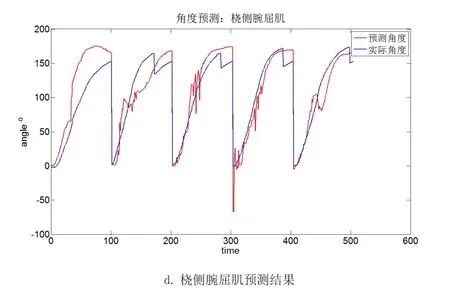
图5 某一位受试者肘关节屈运动角度预测情况
为了分析预测结果,求取预测值与实际值误差的均方根值,各受测者的各肌肉预测值与实际值误差的均方根RMS值如表1。
2.3 结果分析
从表1中可以看出,肱二头肌和肱桡肌的sEMG预测的角度误差更小,表明肱二头肌与肱桡肌与肘关节屈运动的关系更加紧密,这与医学观点:参与肘关节屈运动的
主要肌肉为肱二头肌与肱桡肌,相符合[12]。后续在识别肘关节屈运动时,只需采集肱二头肌和肱桡肌,甚至只采集肱桡肌的sEMG信号。这样可以大大减少数据采集量,在患者某些肌肉无法采集到数据的情况下,利用其较少的甚至是一块肌肉的信号进行识别,就显得尤为重要。
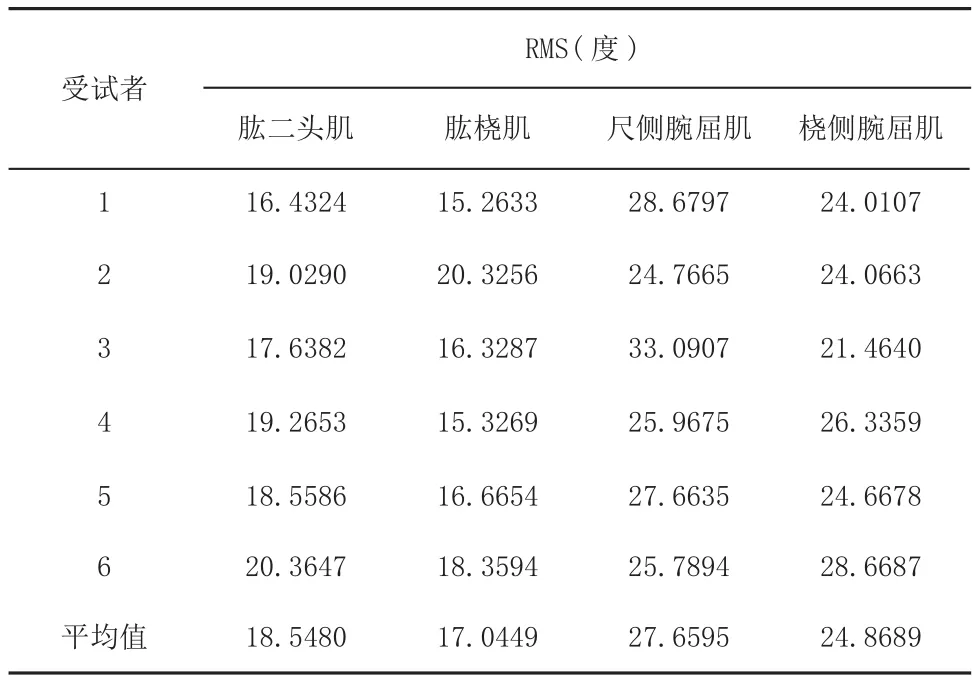
表1 肘关节屈运动角度预测误差
3 结束语
文章通过研究肘关节屈运动相关肌肉:肱二头肌、肱桡肌、尺侧腕屈肌、桡侧腕屈肌的sEMG信号,分别采集其sEMG信号,滤波去噪,提取特征值,利用BP神经网络建立sEMG与肘关节屈运动角度的映射关系。通过对不同肌肉的预测网络测试,发现肱二头肌和肱桡肌的预测结果要明显好于尺侧腕屈肌和桡侧腕屈肌,说明参与肘关节屈运动的肌肉有多快,但有主次之分,并且每块肌肉所能代表肘关节屈运动的程度也不一样,肱二头肌与肱桡肌最能表征肘关节屈运动。因此,在进行肘关节角度预测时,只需采集最具价值的肌肉sEMG信号,而无需采集所有相关肌肉的sEMG信号。从而减少识别所需的肌肉数量,减少数据,提高运算速度。
[1]耿松松.中国残疾人康复现状与问题研究[D].兰州大学,2013.
[2]常微微.上肢外骨骼康复机器人控制系统研究[D].河北工业大学,2013.
[3]张启忠,席旭刚,罗志增.基于表面肌电信号形态特征的多模式识别研究[J].传感技术学报,2012,(12):1636-1642.
[4]朱艳芹.基于LabVIEW的小波去噪技术的研究及应用[D].武汉工程大学,2008.
[5]周伟.MATLAB小波分析高级技术[M].西安:西安电子科技大学出版社,2006.5-9.
[6]谢平,魏秀利,杜义浩,等.基于自排序熵的表面肌电信号特征提取方法[J].模式识别与人工智能,2014,27(6):496-501.
[7]罗志增,王人成.基于表面肌电信号的前臂手部多运动模式识别[J].模式识别与人工智能,2006,27(9):996-999.
[8] Reddy NP ,Gupat V.Toward direct biocontrol using surface EMG signals:Control of finger and wirst joint models [J]. Medical Engineering & Physics, 2007:398-403.
[9]孙保峰.基于神经网络的表面肌电信号分类方法研究[D].吉林大学,2013.
[10]柳松青.MATLAB神经网络BP网络研究与应用[J].计算机工程与设计,2003,27(11):81-84.
[11]雷俊.基于ARM的表面肌电信号采集与模拟仿真系统的设计[D].吉林大学,2014.
[12]余慧杰.具有生理学特性的高精度人体肌肉疲劳建模及其在手臂屈伸运动中的应用研究[D].复旦大学,2008.
Q983+.4
A
2096-2789(2016)11-0011-03
广东省科技计划“基于功能电刺激的瘫痪患者步态康复训练机器人的设计及研发”项目(2013B010102010)。
