基于虚拟样机技术的动力稳定车新型稳定装置研究
2016-12-15韩世昌黄亚宇
韩世昌, 黄亚宇, 胡 斌
(1昆明理工大学 机电工程学院,昆明 650500;2昆明中铁大型养路机械集团有限公司,昆明 650217)
基于虚拟样机技术的动力稳定车新型稳定装置研究
韩世昌1, 黄亚宇1, 胡 斌2
(1昆明理工大学 机电工程学院,昆明 650500;2昆明中铁大型养路机械集团有限公司,昆明 650217)
运用虚拟样机技术,结合刚柔耦合多体动力学,针对稳定车稳定装置开发新型的激振结构,利用ADAMS软件建立了新型稳定装置的虚拟样机,根据现行稳定车工作参数标准在其有效工作范围内各取三组激振频率和垂直静压力对装置工作进行仿真,并从激振频率与激振力两方面对新结构的动力学响应进行分析,并与列车真实运行情况和现行机构工作参数进行了对比评价,总结了不同激振频率和垂直静压力对新型稳定车稳定装置的激振力的影响。同时针对新结构的工作特点,提取了关键部件的实时仿真载荷谱,运用扩展有限元法对其进行有限元分析,仿真结果与后期进行的样机试验一致,其虚拟仿真结果的可信性为进一步开发改进提供了有效的动力学参数依据。
动力稳定车;新型稳定装置;虚拟样机;扩展有限元
动力稳定车是先进的大型铁路线路养护机械[1],经过大、中修后的铁道路线通过动力稳定车作业能够迅速地提高线路的横向阻力和道床的整体稳定性,从而为取消线路作业后列车慢行创造了条件。这对于日益繁忙的高速、重载和大运量的铁路干线运输来说,意义十分重大。WD320型稳定车是我国在引进国外机器、技术的基础上,通过消化、吸收,逐步实现国产化自主研发成功的第一台稳定车,在此过程中许多专家学者以及从事相关行业的工程技术人员做出了不少贡献。朱兴良[2]针对DGS-62N型动力稳定车不同引进批次的不同激振器结构进行了对比和分析,总结了新结构的优点。苏保生[3]介绍了DGS-62N型动力稳定车稳定装置的国产化研究状况。杜利伟[4]对WD320稳定装置进行了结构改造,解决了早期生产的稳定装置底板及枕梁间焊接缺陷及滚轮断裂等问题。同时他和孙建英[5]对稳定装置振动系统进行分析,建立了振动系统微分方程并讨论了其振动特性。马占川[6]和刘永健[7]也针对稳定车在控制系统和电气系统方面进行了改进。但是,自WD320稳定车研发成功以后并没有较大的升级及改造。本研究正是服务于昆明中铁大型养路机械集团有限公司自主研发的改造项目,意在运用虚拟样机技术,结合刚柔耦合多体动力学,针对稳定车稳定装置开发一种新型的激振结构,对新结构的动力学响应与现行机构工作参数进行对比,并通过提取关键部件的载荷谱运用扩展有限元法进行重点分析,仿真结果与样机试验一致,其虚拟仿真的可行性为进一步的开发和改进提供了有效的动力学参数依据。
1 模型建立
1.1 稳定装置及其新结构工作原理
稳定装置是动力稳定车的主要作业装置,它在稳定车的安装位置如图1(a)所示,两个稳定机构在车架中部的下方,通过四杆机构和垂直油缸柔性地连接在车架上。作业时由一台液压马达通过传动轴同时驱动两个激振器,使其产生同步振动,调节液压马达的转速可以改变激振器的振动频率。作业结束时将稳定装置提起,并用锁定机构锁在车架上。
稳定装置的工作原理是模拟列车对轨道的动力作用而设计的。新结构的设计目的在于取消齿轮副,以及减少轴承等易磨损件的数量,从而提高使用可靠寿命。同时,能够控制参与激振的质量,相应的控制稳定装置激振器的振幅。其新结构简图如图1(b), 激振器改为单偏心轴,并通过两片板弹簧悬挂在稳定装置的内部。同时由于滑轨机构解放了其上下自由度,所以偏心轴转动引起的上下振动被抵消,只有水平方向的振动通过悬挂板弹簧传递到整个稳定装置并且参与到稳定车对轨道的作业。
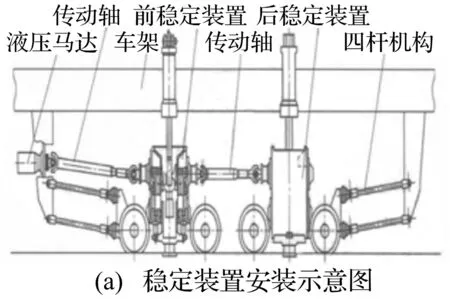
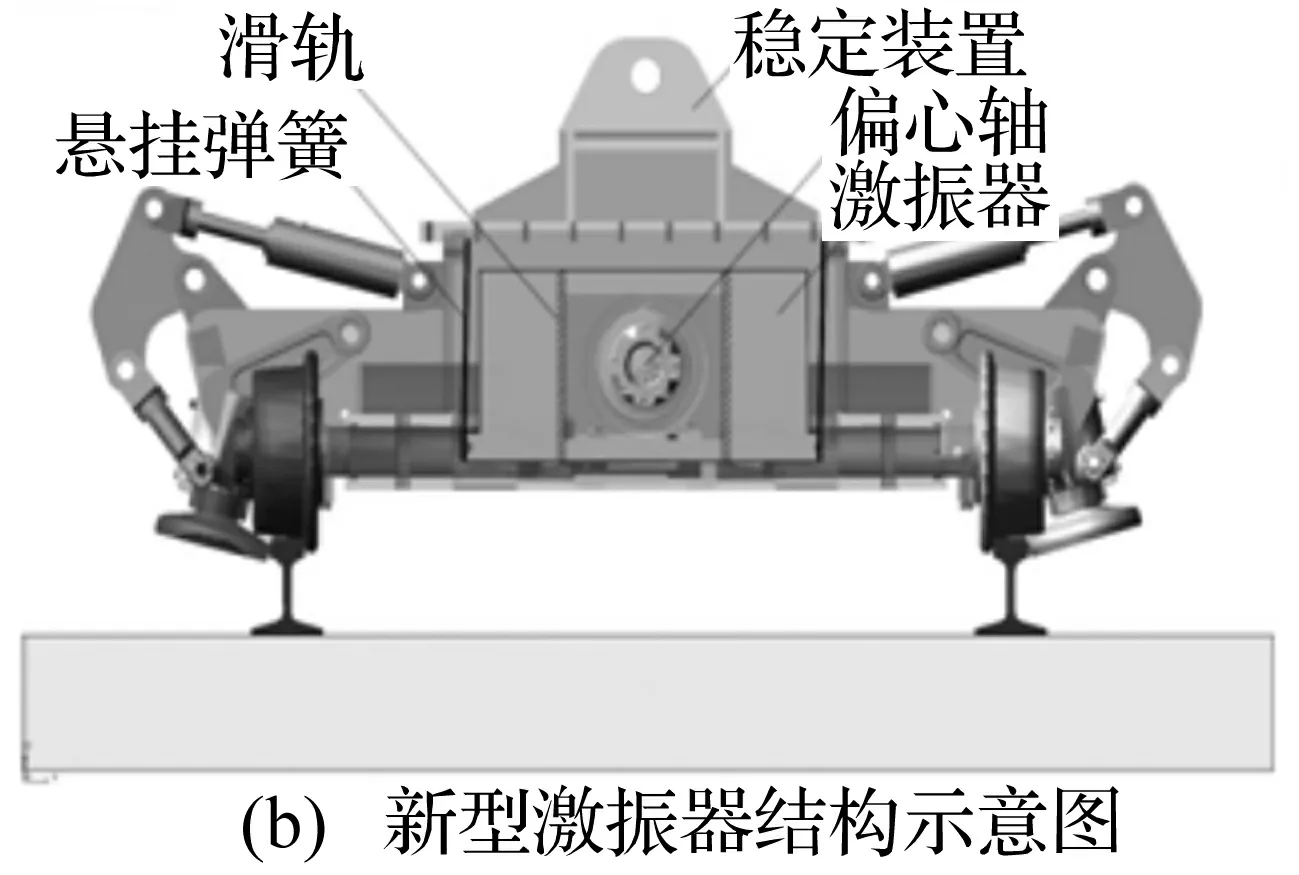
图1 稳定装置及新结构示意图Fig.1 Stabilizing device and its new structure
1.2 动力学分析方法
1.2.1 柔性体坐标系和基本参量
柔性体任一点运动是连体坐标系的刚体运动与弹性变形的合成[8-9]。柔性体上任一点的位置、速度、加速度定义如下。
对任一点P,其位置向量是
r=r0+A(sp+up)
(1)
式中:r是P点在惯性坐标系中的位置向量;r0是连体坐标系原点在惯性坐标系中的位置向量;A是方向余弦矩阵;sp是柔性体未变形时P点在连体坐标系中的位置向量;up是相对变形量。相对变形量up可用不同的方法离散化,如采用模态坐标描述
up=ΦPqf
(2)
式中:ΦP是满足里茨基向量要求的假设变形模态矩阵;qf是变形的广义坐标。
P点的速度和加速度可以对应求导得到
(3)
1.2.2 刚柔耦合系统的动能和势能
(1) 动能
设ξ是(6+k)维的广义坐标,则考虑P点变形前后的位置、方向、模态其速度表示为
(4)
柔性体的动能为
(5)
(2) 势能
柔性体的势能为
W=Wg(ξ)+0.5ξTKξ
(6)
式中:Wg(ξ)是重力势能,K是结构的广义刚度矩阵(对应于模态坐标q)。
Wg(ξ)=∫vργPgdV=∫vρ[rB+A(SP+ΦPq)]TgdV(7)
(3) 能量损失和阻尼
能量损耗函数为
(8)
式中:D是阻尼系数矩阵,在正交模态振型假设下是由对角线模态阻尼率Ci组成的。
1.2.3 刚柔耦合系统动力学方程的建立
以拉格朗日方程导出柔性体动力学方程,并通过约束方程组装成多柔体系统,再运用拉格朗日乘子法,建立刚柔耦合系统动力学控制方程[10]。
(9)
式中:L=T-W是拉格朗日项;Ψ=0是约束方程;λ是对应于约束方程的拉格朗日乘子向量;Q是投影到广义坐标的广义力。将上节中的T、W、Γ代入上式,代入刚柔耦合系统的动力学微分方程为
(10)
1.3 动力学仿真建模
1.3.1 动力学模型工况参数设定
相对于原结构的工作模式,液压马达提供的振动频率为0~45 Hz,垂直静压力0~240 kN,且根据我国的线路条件,在新铺设的线路上作业时,激振器的振动频率一般为25~28 Hz;在既有线路上的作业,振动频率一般为29~30 Hz 。因此,仿真参数也选择在这个范围内,振动频率将采用25 Hz,30 Hz和最大45 Hz,同时垂直静压力分别采用120 kN,180 kN和最大240 kN。
1.3.2 柔性体的导入
本研究将悬挂激振器的板弹簧,以及轨道两个部分通过.mnf中性文件将仿真中的刚体替换为柔性体。由于板弹簧是传递激振器振动和激振力的关键部件,而且在初期设计时只是对其进行了静态校核,所以了解其动态加载后的受力情况对于后期评价其工作效率、工作寿命有着重大意义。同时,由于轨道是轨枕系统中直接受到激振力冲击的部件,为了减小冲击变形对整个系统仿真误差的影响,也将其替换为柔性体。图2分别为导入ADAMS的柔性体。
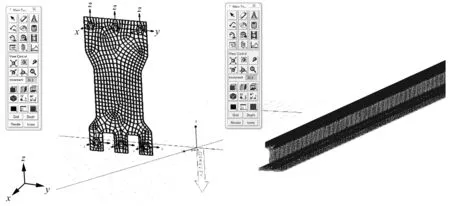
图2 柔性体文件Fig.2 Flexible bodies for ADAMS
1.3.3 稳定装置模型的建立
本文将运用多体仿真软件ADAMS对整个稳定装置的新结构进行建模求解。将三维模型和一段枕轨导入ADAMS,并使用板弹簧和轨道的.mnf柔性文件替换刚性板弹簧和轨道文件,完成替换后将板弹簧的上下螺栓孔分别与激振器和稳定装置通过固定副连接,轨道与轨枕通过固定副连接。之后设置各个构件和零件的属性,根据工作原理添加相应的约束,例如稳定装置中的连杆与连杆,连杆与框架之间用旋转副连接,轮子与钢轨之间建立接触关系并设置摩擦因数,偏心轴与激振器之间采用旋转副连接,对该旋转副施加驱动等。设置完的稳定装置如图3。同时,根据作业走行速度,设稳定装置的初速度为2.5 km/h(695 mm/s)。轨枕系统与地面增加阻尼(预设100 NS/mm)以模拟道砟的缓冲效果。
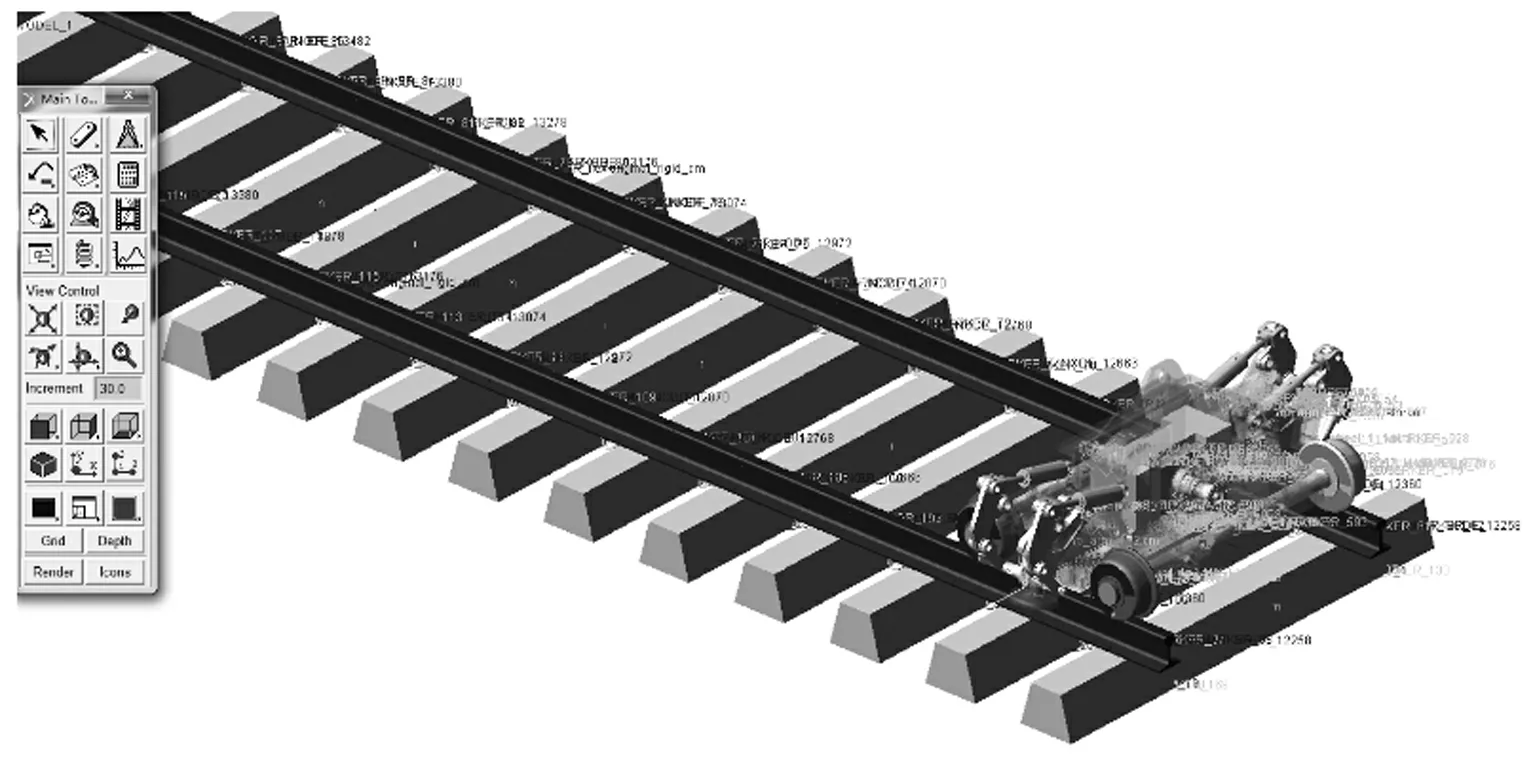
图3 稳定装置虚拟装置模型Fig.3 Virtual model of stabilizing device
2 仿真结果分析
上述设置替换等步骤完成后,分别采用不同垂直静压力和激振频率来研究稳定装置工作受力状况、工作效率,得到激振力随着不同参数输入产生的变化规律,给出垂直静压力和激振频率对激振力的影响。分析新型稳定装置对模拟列车运行时对轨道产生的振动和压力两方面是否满足工作要求。
2.1 对轨道振动模拟的验证分析
考虑到稳定装置的走行轮是传递激振力和下压力的主要工具,它与柔性轨道的接触力,即激振力将作为重点输出进行研究,如图4所示。
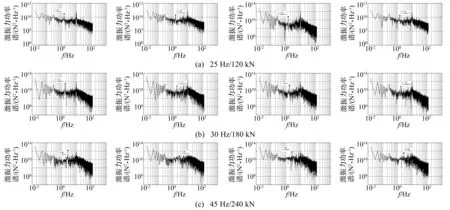
图4 不同工况各走行轮总激振力功率谱Fig.4 PSD of total vibrating force for walking wheels under different working conditions
图中仅选择了25 Hz/120 kN,30 Hz/180 kN,45 Hz/240 kN三组参数下稳定装置四个走行轮总激振力的功率谱,其激振力频率平均值分别为1.445 Hz,1.734 Hz和2.589 Hz,从图中可见,在每个工况参数下四个走行轮的激振力的频率稳定一致,其激振力的频率随激振频率和垂直静压力的增大而增大。到工作范围的极值参数45 Hz/240 kN时,频率达到了2.6 Hz。该最大频率与文献[11]中2004年朔黄铁路典型货车车辆运行动力学试验中得到的空载货车临界蛇形失稳状态的车体横向蛇形运动的主频,2.69 Hz,(试验中C64货车空车以75 km/h的速度运行,已到达蛇形失稳的边缘状态)一致,说明该稳定装置在工作频率方面确实能够达到模拟列车运行时对轨道产生的振动作用。
2.2 对轨道压力模拟效率的验证分析
将各个工况参数下的每个走行轮激振力的载荷谱求有效值,可以得到不同工况下的总激振力,如表1所示。
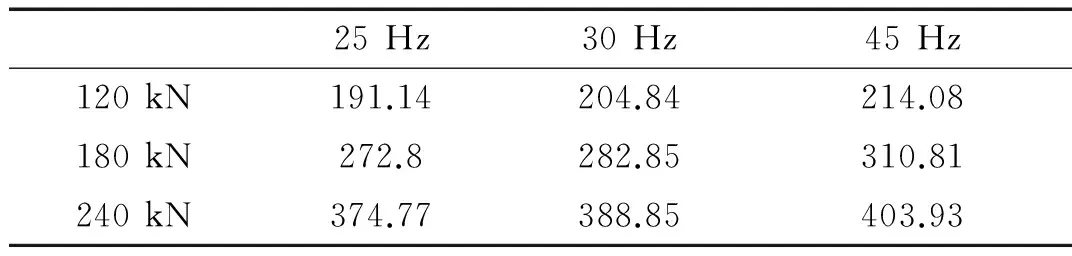
表1 不同工况参数下新型稳定装置的有效激振力(kN)
根据国家规定的稳定车稳定装置的参数标准[12],表1中的激振力工作范围完全符合标准为0~Nmax,(Nmax>320 kN),并且考虑到下压力能够做到无级调节,该装置的激振力范围能够符合在不同环境下轨道作业对激振力的要求。
同时,将四个走行轮的仿真数据在不同垂直静压力下的有效值进行对比,如图8所示,可以得到以下结论:
(1) 新型稳定装置在工作激振力方面的仿真结果能够达到模拟列车运行时对轨道产生的压力作用且按照标准符合实际作业的要求。
(2) 工作走行轮的激振力随着垂直静压力的增大而增大,这将能大大提高道碴充填和密实的效果。
(3) 激振器的振动频率增大,激振力也会相应的随之增大,但在增大幅度上并不明显。
(4) 实际中对新型线路采用25~28 Hz,既有线路采用29~30 Hz比较合理,激振力已经能够满足作业需要,且较低频率的采用也能在一定程度上延长轴承等耗损件的寿命。
2.3 板弹簧动力学载荷谱
为了更详细的研究稳定装置中关键部件的受力情况,还需要借助有限元方法进一步对其工作过程的应力应变状态进行分析。新型稳定装置中的悬挂板弹簧是传递激振器振动和激振力的关键部件,所以详细分析其工作受力、工作寿命对于保证工作效率,保障安全生产都有重要的意义。根据图5中的规律,现将最大激振力时,即垂向静压力240 kN,振动频率45 Hz时的板弹簧的载荷谱导出,如图6所示为板弹簧下端与激振器的螺栓链接之一的三个轴向的受力情况,供分析其动力学响应使用(共三个连接,篇幅原因仅在文中画出其中一个)。

图5 不同工况各走行轮总激振力有效值Fig.5 Effective value of total vibrating force of walking wheels in different working conditions
3 悬挂弹簧动力学响应分析
3.1 扩展有限元分析及样机结果对比
本文即借助有限元软件ABAQUS,采用XFEM方法对板弹簧进行有限元建模分析。从图6可以看出板弹簧在X方向(沿轨道方向)的受力相对其他两个方向受力非常小,在接下来的动态响应分析中将予以忽略,并将另外两个方向的载荷谱做简化作为边界条件加载以简化计算时间。有限元计算后,板弹簧随加载时间的应力情况如图7所示。其受力特点如下:① 弹簧下部曲线过渡边缘出现应力集中;② 在仿真开始不久(时间步0.544 s时)裂纹开始产生;③ 裂纹继续扩展;④ 在接近完成仿真时间2 s时裂纹长度已经达到失效
长度,同时裂纹方向发生了变化已转至水平方向,且板弹簧下端发生弯卷。仿真结果表明悬挂弹簧下端在较短时间内发生了断裂,且断裂一直随时间扩展直至失效。
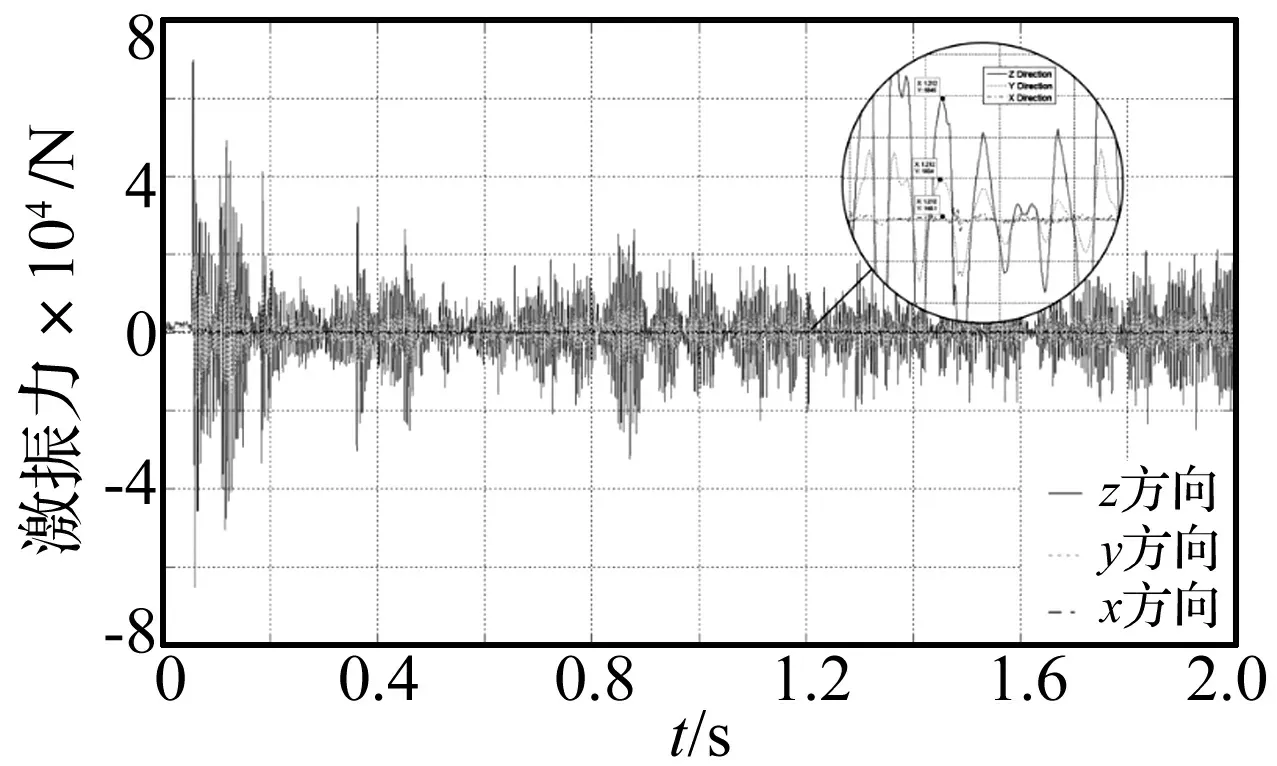
图6 板弹簧载荷谱Fig.6 Loading history of hanging board

图7 扩展有限元仿真结果Fig.7 Simulation result of XFEM
3.2 样机实验
有限元的仿真结果说明在此工况下现行结构的板弹簧强度不足,仍有必要改进以保证正常工作寿命。将此结果与工厂技术部分讨论后,在提前做好安全防范措施的前提下进行了样机试验,图8为实验装置,工作人员在做最后检查,实验结果与仿真结果一样,板弹簧作为传递振动的关键部件很快出现裂纹并失效,如图9所示。试验中板弹簧的裂纹位置及开裂方向与仿真一致,很好的说明了虚拟样机数据的可信性,能够为针对新型结构的板弹簧强度设计的改进提供有力数据支撑。
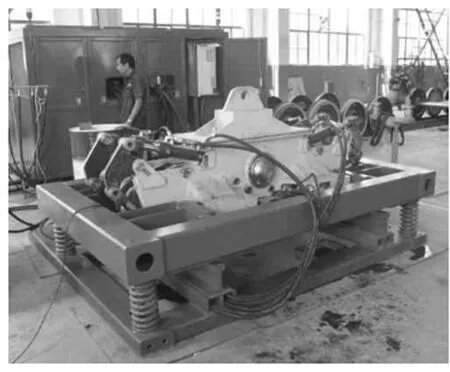
图8 新型稳定装置样机试验Fig.8 Prototype of new stabilizing device

图9 样机中失效板弹簧Fig.9 Failed hanging board
4 结 论
(1) 利用ADAMS软件建立了新型稳定装置的虚拟样机,并在其工作有效范围内各取三组激振频率和垂直静压力对装置工作进行仿真,仿真结果证明新型稳定装置能够有效地模拟列车对轨道的动力作用,并且符合实际作业的标准。
(2) 通过仿真结果可以看出工作走行轮的激振力随着垂直静压力的增大而增大,这将能大大提高道碴充填和密实的效果。激振器的振动频率增大,激振力也会相应的随之增大,但在增大幅度上并不明显。实际中对新型线路采用25~28 Hz,既有线路采用29~30 Hz比较合理,激振力已经能够满足作业需要,且较低频率的采用也能在一定范围上延长轴承等耗损件的寿命。
(3) 将稳定装置的关键部件板弹簧的载荷谱提取并运用扩展有限元方法对其进行应力分析,结果表明现行板弹簧的结构并不合理,强度不能满足工作状态下的载荷谱需求,实际样机试验也证明了扩展有限元结果的有效性,板弹簧有必要在后期进行再设计以满足新型稳定装置的工作要求。
[1] 赵凤德.动力稳定车[M].第1版.北京:中国铁道出版社,2005:1.
[2] 朱兴良.DGS-62N动力稳定车激振器结构对比分析[C]// 大型养路机械学术研讨会论文集.北京: 中国铁道学会,2003:39-42.
[3] 苏保生.动力稳定车稳定装置的国产化研究[J].铁道建筑,1997(2):31-35. SU Baosheng. localization research on stabilizing device of dynamic track stabilizer[J]. Railway Engineering,1997(2):31-35.
[4] 杜利伟. WD320稳定装置结构改造研究[J].机车车辆工艺,2005,12(6):6-7. DU Liwei. Research on structure retrofit for stabilizing device of WD320 dynamic track stabilizer [J]. Locomotive & Rolling Stock, 2005,12(6):6-7.
[5] 孙建英,杜利伟. WD320型稳定装置振动分析[J].现代商贸工业,2007,19 (12):278-279. SUN Jianying, DU Liwei. Vibrating analysis of the stabilizing device of WD320 dynamic track stabilizer [J]. Modern Business Trade Industry, 2007,19(12):278-279.
[6] 马占川.动力稳定车稳定头垂直下压力控制系统技术改造的探讨[J].铁道建筑,2008(8):106-107. MA Zhanchuan. Technical reconstruction on vertical pressing control system of the stable head for a dynamic track stabilizer [J]. Railway Engineering, 2008(8):106-107.
[7] 刘永建.WD320型动力稳定车电气控制系统改进的研究[D].济南:山东大学,2007.
[8] 贺朝霞,刘更,吴立言. 基于试验的刚柔耦合动力学建模方法研究[J].机械设计,2008, 25(9):76-78. HE Zhaoxia, LIU Geng, WU Liyan. Research on dynamics modeling method of rigid-flexible coupling based on experiment[J]. Journal of Machine Design,2008,25(9):76-78.
[9] 杨辉,洪振嘉,余征耀. 刚-柔耦合多体系统动力学建模与数值仿真[J].计算力学学报,2003,20(4):402-408. YANG Hui, HONG Zhenjia, YU Zhengyao. Dynamic modeling and numerical simulation for a rigid-flexible coupling multibody system [J]. Chinese Journal of Computational Mechanics, 2003,20(4):402-408.
[10] 韩清凯,罗忠. 机械系统多体动力学分析、控制与仿真[M].第1版.北京:科学出版社,2010:156.
[11] 翟婉明.车辆-轨道耦合动力学[M].第3版.北京:科学出版社,2007:152-153.
[12] 中华人民共和国铁道部. 中华人民共和国铁道行业标准轨道动力稳定车:TB/T 3064.1—2003[S].北京:铁道部标准计量研究所,2003.
[13] BELYTSCHKO T, BLACK T. Elastic crack growth in finite elements with minimal remeshing [J]. International Journal for Numerical Method in Engineering, 1999,45(5): 601-620.
A new type of stabilizing device for a dynamic track stabilizer based on virtual prototype technology
HAN Shichang1, HUANG Yayu1, HU Bin2
(1. School of Mechanical and Electrical Engineering, Kunming University of Science and Technology,Kunming 650500, China;2. China Railway Large Maintenance Machinery CO.,LTD. Kunming 650217, China)
Virtual prototype technology combined with the rigid-flexible coupled multi-body dynamics was applied in this study for a newly developed stabilizing device of a dynamic track stabilizer. The virtual prototype for the new stabilizing device was modeled using ADAMS software. 3 sets of exciting frequencies and vertical static pressures in its effective working range were introduced in the device’s simulation. The dynamic responses of the new device were analyzed from both exciting frequency and exciting force aspects, and they were compared with working parameters of the current stabilizing device and the situation of the real vehicle operation. The effects of exciting frequency and vertical static pressure on the exciting force of the new device were studied. Aiming at the working features of the new device, the simulated realtime load spectrum of key parts was extracted, the new device was analyzed with the extended FE method. The simulation results agreed well with those of the physical prototype tests. The simulation results of the virtual prototype for the new device provided a reference for further improving the new stabilizing device.
dynamic stabilizer; new stabilizing device; virtual prototype; extended finite element method
2015-07-23 修改稿收到日期:2015-11-02
韩世昌 男,博士生,1985年7月生
黄亚宇 男,硕士,教授,1962年7月生
E-mail:731968982@qq.com
TP391.9;U273.4
A
10.13465/j.cnki.jvs.2016.21.034
