基于混合BTT/STT控制的滑翔制导炸弹自动驾驶仪设计
2016-12-14严大卫孙瑞胜陈洁卿
严大卫,孙瑞胜,陈洁卿,祝 刚
(1.南京理工大学 能源与动力工程学院,南京 210094;2.中国工程物理研究院 电子工程研究所,四川 绵阳 621900)
基于混合BTT/STT控制的滑翔制导炸弹自动驾驶仪设计
严大卫1,孙瑞胜1,陈洁卿1,祝 刚2
(1.南京理工大学 能源与动力工程学院,南京 210094;2.中国工程物理研究院 电子工程研究所,四川 绵阳 621900)
研究了混合BTT/STT控制技术在大升阻比滑翔制导炸弹上的应用。根据滑翔制导炸弹的动态特性和控制需求建立了BTT控制模型,设计了BTT控制结构。为解决BTT控制在小过载指令作用下可能会产生的滚转角指令抖动现象,提出了混合BTT/STT控制方法,即在小过载指令下适时引入STT控制。对比了六自由度弹道仿真与纯BTT控制模式。仿真结果表明,混合BTT/STT控制可有效解决滚转角指令抖动问题,研究结果可为滑翔制导炸弹BTT控制系统的工程实现提供技术参考。
滑翔制导炸弹;控制系统;混合BTT/STT控制;滚转抖动;数学模型
高度信息化、精确化和远程灵巧化的航空制导武器是未来战场一个重要的发展趋势,如美国的JDAM-ER和小直径炸弹(SDB),可攻击敌指挥控制掩体、防空设施、飞机跑道、导弹阵地、火炮阵地等多种目标[1]。文献[2]根据滑翔制导炸弹的战术技术性能要求,在纵向平面内分析了下滑—滑翔—俯冲的弹道特性,并给出了按照预定弹道倾角跟踪的控制方案,但没有考虑滑翔制导炸弹的空间飞行控制方式。为了充分研究滑翔制导炸弹在机动性能、气动效率等方面的性能,实现远程精确打击功能,可采用大升阻比的BTT飞行控制方式[3]。然而,通过分析BTT控制动力学与运动学方程可知,滑翔制导炸弹在小控制信号作用下,可能会出现滚转角指令大幅度的激烈变化,导致过载指令产生抖动现象,进而影响其控制效果。为了能在全弹道环境下都有满意的飞行控制性能,文献[4~12]采用了变结构、θ-D、SDRE、滑膜反演、H∞、参数空间和神经网络等方法,从提高系统鲁棒性能的角度设计了BTT导弹的自动驾驶仪。文献[13~14]则采用了混合BTT/STT控制,分别对大攻角导弹和远程空空导弹设计了控制算法,提高了导弹的机动性和稳定性。
本文针对滑翔制导炸弹无动力滑翔控制的特点,采用了混合BTT/STT控制技术,即炸弹在小信号控制状态下,采用STT控制方式;大信号控制状态下,采用BTT控制方式,并提出了混合BTT/STT控制模式方案以及制导指令形成方法。最后,通过与完全BTT控制模式的6DOF弹道进行对比仿真,验证了混合BTT/STT控制模式设计是合理、有效的。
1 系统描述
1.1 系统工作过程与特点
滑翔制导炸弹由机载投放,采用“惯性/卫星/导引头”复合制导体制。根据其战术技术特点,全弹道可以分成3个阶段:稳定下滑段、中段滑翔段、末段攻击段。炸弹由飞机高空投放后,制导系统首先进行姿态稳定控制,使得炸弹稳定下滑;待姿态稳定后,弹载计算机控制翼展机构展开滑翔弹翼组件,按照升阻比最大原则进行滑翔控制飞行,以获得最大的滑翔距离;当炸弹飞抵目标区域上空并满足末制导交接班条件时,系统进入末段攻击段,弹载计算机通过导引系统实时建立弹-目相对运动关系,形成控制指令,操纵舵面偏转,使炸弹导向目标。
滑翔制导炸弹是一种无动力面对称远程空地武器,全弹道飞行时间约有10 min,大部分处于亚音速段。在滑翔并攻击目标的过程中,其会受到扇面发射、风、传感器噪声以及目标本身的横向运动等因素的影响。这些都需要炸弹在侧向平面进行机动飞行,而其侧向力效率仅为升力的1/5,如果采用STT控制模式,势必要炸弹产生较大的侧滑角满足侧向需用过载,同时由于弹体侧滑引起的斜吹力矩也要消耗炸弹许多能量。这样大大抑制了炸弹气动效率的发挥。如若采用控制炸弹倾斜角至合理的位置上,通过炸弹升力在水平机动平面内的分量进行侧向机动的BTT控制模式,则可以充分利用滑翔制导炸弹大展弦比、大升阻比弹翼的气动优势,提高控制效率和精度,使得滑翔制导炸弹实现远程精确制导。
1.2 BTT控制数学模型
假设在BTT控制过程中滑翔制导炸弹的飞行攻角α、侧滑角β均为小量,即认为sinα≈α,cosα≈1,sinβ≈β,cosβ≈1;忽略二阶小量;建立炸弹动力学运动方程[15-16]:
(1)
式中:a1,a2,a3,a4,a5,b1,b2,b3,b4,b5,c1,c2,c3为气动参数;v为炸弹速度;g为重力加速度;ny,nz为导弹纵向和侧向过载;δx,δy,δz为三通道的控制舵偏角;γ为倾斜角;ωx,ωy,ωz分别为弹体3个轴向角速度;Jx,Jy,Jz分别为弹体3个轴向的转动惯量。
2 混合BTT/STT控制与结构设计
2.1 法向通道控制回路
法向通道控制一般有姿态控制结构和过载控制结构2种。过载控制方式相对姿态控制,其控制增益不随飞行速度和高度变化而变化,机动性和控制精度较好。为此,滑翔制导炸弹法向(俯仰、偏航)通道采用过载飞行控制结构,结构框图如图1所示。系统由角速率反馈回路、复合回路和加速度反馈回路3个回路组成。角速率反馈回路和复合回路实现对弹体的阻尼和增稳,加速度反馈回路实现炸弹法向过载控制。为便于控制器参数设计,将舵机环节、加速度表和陀螺传递环节置为1。
控制器的形式:
δ=Krω+KrKI∫ωdt+KrKIKA∫Δndt
(2)
式中:δ为法向通道控制舵偏角;nc为法向指令过载;ω为弹体法向转动角速度;Δn为法向过载偏差值;Kr,KI,KA为控制器参数。
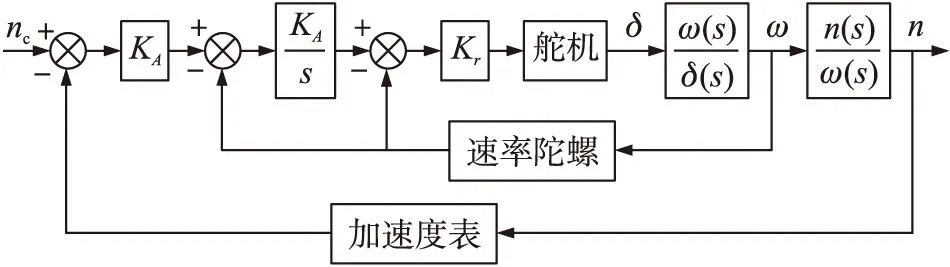
图1 法向过载控制回路结构框图
2.2 倾斜通道控制回路
倾斜通道控制回路采用倾斜角和倾斜角速率反馈结构,其自动驾驶仪基本结构如图2所示。图中,γc为滚转角指令。为了提高炸弹抗干扰能力,在炸弹倾斜角稳定回路引入了PI校正。弹体倾斜角的测量是由速率陀螺积分得到,积分初值由机载火控系统装定。

图2 滚动稳定回路系统结构框图
炸弹倾斜通道自动驾驶仪的设计参数有倾斜角控制增益Kγ和角速率控制增益Kp,这些参数的合理选择可以保证炸弹倾斜通道具有要求的动态性能和抗干扰能力。
控制器的形式:
δx=Kpωx+KpKγΔγ
(3)
式中:δx为滚动控制舵偏角,Δγ为倾斜角偏差值,γc为倾斜角指令。
2.3 BTT/STT控制逻辑

图3 BTT/STT自动驾驶仪控制结构
组合控制模式在弹体坐标系下指令过载nc分以下三段处理:
①小过载指令信号条件,即nc γc=0 (4) ②中等过载指令信号条件,即n1 (5) ③大过载指令信号条件,即nc>n2时,采用BTT控制模式: (6) n1和n2的选取与气动特性和弹道特性有关。 为发挥出BTT控制的优势,n2取值不宜过大,应尽量包络转弯时需用过载,同时当过载大于n2时可以避免因为风速变化、传感器噪声等因素引起滚转角大幅变化;n1取值主要考虑当过载小于n1时发挥STT控制的快速性,此时产生的侧滑角需较小,通常n1可以取为n2的1/5~1/10。 为了消除瞬时响应对系统的影响,当炸弹从末制导段到制导的最后阶段,并越过预置的剩余时间的门限时,STT指令被线性引入BTT指令逻辑中[6],指令形成方式为 (7) 式中:ρ参数在预定时间间隔内从0到1线性变化。 为了更好地分析BTT/STT组合控制效果,以某型滑翔制导炸弹的典型飞行条件为例,进行BTT/STT组合控制和单纯BTT控制的6DOF弹道对比仿真。初始投放条件:投放高度y0=4km,初速v0=1 000km/h,初始弹道倾角为0°,初始弹道偏角为7°。为使得滑翔制导炸弹在全弹道上均具有较好的鲁棒控制性能,本文采用参数空间法设计了控制器参数:Kr=0.8,KI=0.2,KA=100,Kp=0.26,Kγ=0.1,n1=0.1,n2=0.5。BTT/STT组合控制的切换时间取剩余时间为20s。图4~图7给出了BTT/STT组合控制弹道数字仿真结果,飞行过程中侧滑角有效控制在0附近,由BTT控制实现了转弯;在飞行末端由于引入了STT控制滚转通道也未出现抖动现象。图8、图9给出了单纯BTT控制模式与BTT/STT组合控制模式下的过载随时间的对比仿真曲线。从图中可以看出,在飞行末段60s开始,由于在小过载指令下纯BTT控制滚转角频繁变化使得法向过载剧烈抖动,而引入STT后的BTT/STT组合控制模式解决了BTT控制在小过载指令信号下制导信号剧烈抖动的问题,提高了滑翔制导炸弹的制导稳定性和准确度。 图4 空间飞行弹道曲线 图5 攻角与俯仰舵偏角随时间的变化曲线 图6 侧滑角与偏航舵偏角随时间的变化曲线 图7 滚转角与滚转舵偏角随时间的变化曲线 图8 纵向过载随时间变化的对比曲线 图9 侧向过载随时间变化的对比曲线 本文针对滑翔制导炸弹在小过载指令条件下存在的BTT控制抖动问题,结合STT控制的特点,设计了BTT/STT控制系统结构,即炸弹在小过载指令状态下,采用STT控制方式;大过载指令状态下,采用BTT控制方式。研究了BTT/STT组合控制模式方案以及指令形成方法,解决了BTT模式滚转角指令抖动问题,并通过6DOF弹道对比仿真验证了BTT/STT组合控制模式的合理性和有效性,为滑翔制导炸弹BTT控制系统工程实践提供了技术参考。 [1] 朱丽华.备受关注的美国小直径炸弹[J].现代军事,2005,12(9):45-46. ZHU Li-hua.The high-profile small diameter bomb[J].Conmilit,2005,12(9):45-46.(in Chinese) [2]YANG M,SHANG-GUAN Y L.Research of control for small diameter bomb[J].Tactical Missiles Control Technique,2006(4):7-9. [3]McGEHEE R M.Bank-to-turn technology,AIAA-1979-1752[R].1979. [4]童春霞,王正杰,张天桥.双滑膜变结构控制的BTT导弹自动驾驶仪设计研究[J].系统仿真学报,2005,17(3):518-521. TONG Chun-xia,WANG Zheng-jie,ZHANG Tian-qiao.Dual sliding mode variable structure control design for BTT missile autopilot[J].Acta Simulata Systematica Sinica,2005,17(3):518-521.(in Chinese) [5]董斌,李玉华.BTT导弹俯仰/偏航通道变结构控制系统设计[J].科学技术与工程,2011,11(14):3 197-3 200. DONG Bin,LI Yu-hua.Autopilot design of pitch and yaw channel for BTT missile based on model reference variable structure control[J].Science Technology and Engineering,2011,11(14):3 197-32 00.(in Chinese) [6]XIN Ming,BALAKRISHNAN S N,STANSBERY D T.Nonlinear bank-to-turn/skid-to-turn missile outer-loop/inner-loop autopilot design withθ-Dtechnique,AIAA-2003-5581[R].2003. [7]JAMES R C,DONALD T S.Nonlinear hybrid bank-to-turn/skid-to-turn missile autopilot design,AIAA-2001-4158[R].2001. [8]董朝阳,陈宇,王青,等.基于积分滑膜的BTT导弹鲁棒反演控制律设计[J].航空兵器,2011,44(1):3-8. DONG Chao-yang,CHEN Yu,WANG Qing,et al.Robust backstepping controller design based on integral sliding mode surface for bank-to-turn missiles[J].Aero Weaponry,2011,44(1):3-8.(in Chinese) [9]朱凯,齐乃明,秦昌茂.基于二阶滑模的BTT导弹反演滑模控制[J].系统工程与电子技术,2010,32(4):829-832. ZHU Kai,QI Nai-ming,QIN Chang-mao.Backstepping sliding mode control for BTT missiles based on second-order sliding mode[J].Systems Engineering and Electronics,2010,32(4):829-832.(in Chinese) [10]张颖昕,董朝阳,王青.BTT导弹的协调式分散鲁棒H∞控制器设计[J].宇航学报,2011,32(4):734-740. ZHANG Ying-xin,DONG Chao-yang,WANG Qing.Decentralized robustH∞controller design for bank-to-turn missile with coordinate loop[J].Journal of Astronautics,2011,32(4):734-740.(in Chinese) [11]何金刚,段朝阳.基于参数空间法的BTT导弹自适应自动驾驶仪设计[J].航空兵器,2010,43(6):29-32. HE Jin-gang,DUAN Chao-yang.Adaptive autopilot design for BTT missile based on parameter space method[J].Aero Weaponry,2010,43(6):29-32.(in Chinese) [12]方群,王祥.基于在线RBF神经网络的BTT导弹控制器设计[J].西北工业大学学报,2014,40(3):446-450. FANG Qun,WANG Xiang.Designing BTT missile flight controller with online RBF neural network[J].Journal of Northwestern Polytechnical University,2014,40(3):446-450.(in Chinese) [13]梁学明,杨士元,梁晓庚,等.混合BTT/STT大攻角导弹自动驾驶仪设计[J].清华大学学报,2011,71(1):7-11. LIANG Xue-ming,YANG Shi-yuan,LIANG Xiao-geng,et al.Hybrid BTT/STT autopilot design for high angle-of-attack missiles[J].Journal of Tsinghua University,2011,71(1):7-11.(in Chinese) [14]吕飞,姜殿民.远程空空导弹的BTT/STT复合控制算法研究[J].计算机仿真,2013,29(12):49-52. LV Fei,JIANG Dian-min.Research on hybrid BTT/STT control algorithm for long-range air-to-air missile[J].Computer Simulation,,2013,29(12):49-52.(in Chinese) [15]王凌艳,吕鸣,孙未蒙,等.BTT导弹的解耦问题综述[J].飞航导弹,2009,40(6):60-64. WANG Ling-yan,LV Ming,SUN Wei-meng,et al.Review on decoupling problem of BTT missile[J].Winged Missiles Journal,2009,40(6):60-64.(in Chinese) [16]张平,黄雅.导弹动力学建模与BTT解耦控制[J].系统仿真学报,2006,18(2):773-776. ZHANG Ping,HUANG Ya.Missile’s dynamical modeling and BTT decoupling control[J].Journal of System Simulation,2006,18(2):773-776.(in Chinese) Hybrid BTT/STT Autopilot Design for Glide Guided Bomb YAN Da-wei1,SUN Rui-sheng1,CHEN Jie-qing1,ZHU Gang2 (1.School of Power Engineering,Nanjing University of Science and Technology,Nanjing 210094,China; 2.Institute of Electronic Engineering,CAEP,Mianyang 621900,China) Hybrid BTT/STT(Bank-to-Turn/Skid-to-Turn)control system applied to glide guided bomb(GGB)was studied.According to the dynamic characteristics and control demands of GGB,BTT control model was built,and the control structure was designed.The roll command dithers when the small overload command occurs in BTT control mode.To solve the problem,the Hybrid BTT/STT control mode was introduced.The six-degree-of-freedom(6DOF)trajectory simulation of BTT/STT and full BTT control mode was carried out.The result shows that the hybrid BTT/STT is valid and effective.The achievement offers reference for the design of BTT control system of GGB. glide guided bomb;control system;BTT/STT control;rolling dither;mathematical model 2016-05-16 国家自然科学基金委员会和中国工程物理研究院联合基金(11176012);江苏省普通高校研究生科研创新计划项目(SJZZ15_0052) 严大卫(1991- ),男,硕士研究生,研究方向为弹箭飞行制导与控制。E-mail:1520172622@qq.com。 孙瑞胜(1978- ),男,副教授,博士,研究方向为弹箭飞行制导与控制。E-mail:srscom@163.com。 TJ765.2 A 1004-499X(2016)04-0047-05
3 6DOF仿真及其结果分析






4 结束语
