基于移动平台的SIFT算法优化
2016-12-13马书香杨会伟
马书香,杨会伟
(芜湖职业技术学院信息工程学院,安徽芜湖 241001)
基于移动平台的SIFT算法优化
马书香,杨会伟
(芜湖职业技术学院信息工程学院,安徽芜湖 241001)
本文通过快速构建图像的低频信息图像,并完成其上的特征点检测,简化SIFT(Scale Invariant Feature Transform)图像匹配算法高斯空间构造的复杂度,以此来提高特征点检测效率,提高算法在移动设备上的运行速度,并在Android平台上将优化算法和SIFT算法进行对比。实验结果表明,优化的算法在多种场景下保证配准效果的同时提高了特征点检测速度,尤其是在旋转变化条件下效果更好。
低频图像;特征点检测;配准
SIFT(Scale Invariant Feature Transform)算法的核心是通过高斯变化获取尺度空间,然后在尺度空间中寻找特征点,并提取其位置、尺度等信息,在目标识别、图像检索等图像处理领域有着广泛的应用。随着移动平台的飞速发展,将优秀的算法应用于移动平台是一种迫切需求,但是SIFT算法存在计算量大、实时性差的问题,阻碍其在移动平台上的使用。因此,优化算法是必然趋势。
1 SIFT算法的基本原理
SIFT算法是在不同尺度空间上寻找极值点,提取图像的特征不变量,主要步骤如下所示。
1.1 尺度空间构建
一幅图像的尺度空间L(x,y,σ)为
L(x,y,σ)=G(x,y,σ)*I(x,y).
(1)
其中,G(x,y,σ)为尺度可变的高斯函数,*为卷积运算,I(x,y)为原图像。
利用不同尺度的高斯差分核与图像卷积生成高斯差分尺度空间D(x,y,kσ)为

(2)
其中,k为不同的高斯核尺度,k的初始值为1,尺度以k倍递增。
1.2 尺度空间极值点检测及定位
在高斯差分空间中间的几层图像上,将每个像素点与它同尺度的8个相邻点及上下相邻尺度对应的9×2个点比较,以确定其是否为极值点。然后利用拟合函数来确定关键点的位置和尺度,同时去除低对比度的关键点和不稳定的边缘响应点。
1.3 关键点特征方向的确立
采集关键点邻域像素的梯度方向分布特征,计算高斯空间图像(x,y)处的梯度值m(x,y)和方向θ(x,y)。

(3)

(4)
其中,L为关键点所在的尺度空间值。
统计邻域内像素的梯度和方向,把最大梯度值对应的角度值作为关键点的主方向。
1.4 关键点特征描述
在关键点所在的高斯图像上,将关键点附近的邻域划分为4×4个子区域,每个子区域作为一个种子点,每个种子点有8个方向。统计4×4个子区域的8个方向的梯度值,就生成了128维的关键点的特征向量,该向量就是SIFT的特征描述。
2 SIFT算法优化
根据SIFT原理可知,尺度空间的构造耗时多。另外,在SIFT算法高斯尺度空间构造的过程中,如果保持图像的分辨率不变,随着高斯平滑核的增大和逐步的高斯低通滤波,原体现图像细节的高频信号和污染图像的高频信号减少,包含图像大部分信息的低频信息被提取。因此,本文直接在低频图像中获取稳定的特征点,步骤如下:第一步,选择合适的高斯核对图像进行高斯滤波,滤除高频信号,保留图像的低频信号;第二步,在第一步中的低频信号上确定检测区域,并获取区域内的极值点,即稳定点。
2.1 高斯核的确定
首先对图像进行预处理,然后通过高斯滤波快速获取低频信息图像。对于多维高斯滤波运算采用分离滤波器把多维的卷积分解成多个一维卷积,从而提高运算速度。例如,图像的二维高斯滤波运算,先对图像的行进行一维卷积运算,再对图像的列进行一维卷积运算。由此可知,对图像进行一次高斯平滑滤波,其运算量与图像尺寸和高斯核有关。在图像尺寸确定的情况下,二维高斯滤波的计算量与σ成线性关系,σ越大,运算时间越长。
在低频信息图像检测区域固定的情况下,不断改变高斯核σ,将所检测到的稳定点进行统计,绘制σ(横坐标)和稳定点数(纵坐标)间的关系图(图1)。σ与检测的稳定点数近似反比关系,在σ达到一定值时稳定点数趋于稳定。

图1 高斯核σ与检测到的特征点数目的对应关系曲线
综合考虑特征点的稳定性、特征点的数目和检测时间三个关键性指标,在保障检测出的特征点数目稳定的情况下,σ越小检测时间越短,否则算法的实时性差。由图1知,σ在值为7时稳定点数已基本稳定。
2.2 稳定点检测区域的确定
在固定σ值为7的条件下,通过实验的方式确定极值检测区域。对不同图像的低频信息图像,统计其在大小不同的检测区域检测到的极值点数目,如表1所示。

表1 不同的极值点检测区域所检测出的稳定点数
其中,第一列为图像的名称,主要是从牛津大学标准图像库选取,第一行为稳定点检测邻域的半径大小,表格中内容为在所对应情况下的点数。
从表1可以看出,检测区域太小,检测到的稳定点数有冗余,算法执行时间长,会降低算法的实时性。当极值检测区域太大,所检测到的特征点数目减少的幅度太大,会降低配准效果,因此,本文选择以被检测点为中点,半径为3个像素点大小的范围作为检测区域,不仅能够保证适当数目的稳定检测点,还能够尽可能地提高算法的检测效率。
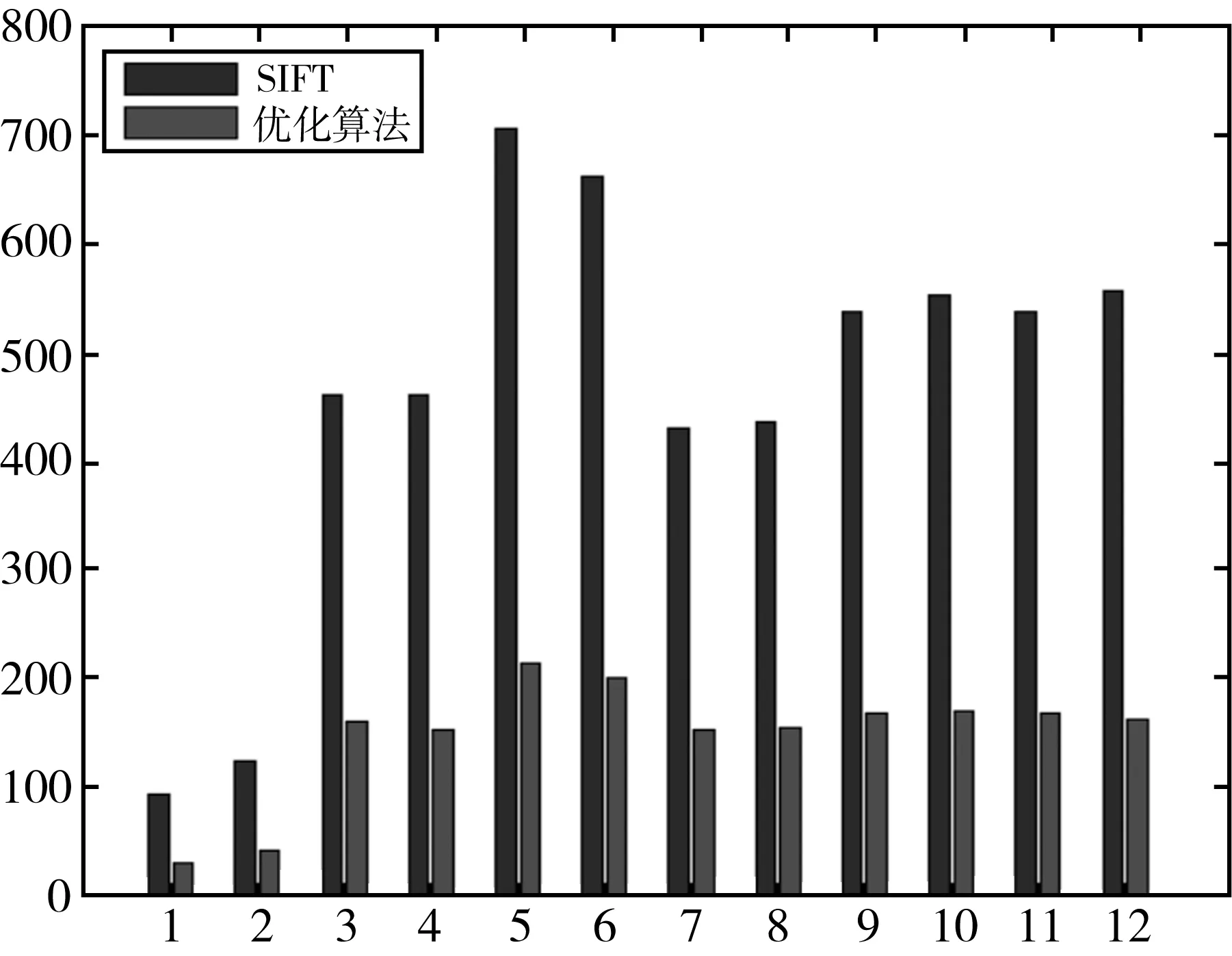
图2 不同场景的图像对在不同方法下的特征点检测运行时间(ms)
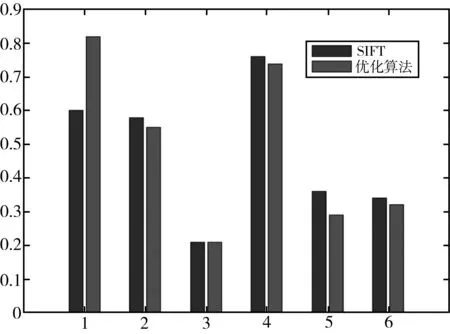
图3 不同场景的图像对在不同方法下的特征点配准率(%)
3 实验结果与分析
在Android移动设备平台上使用Android NDK和OpenCV,对不同场景下的图像采用两种算法从特征点检测时间和特征点配准率(两幅图像配准点和特征点数目比值的平均值)两方面进行对比分析。从旋转变化情况下的Adam组、光线变化条件下的Leuven组、模糊变化条件下的Trees组、压缩的条件下的UBC组、缩放条件下的Boat组、视角变化条件下的Graffiti组中每组选择两幅图像作为测试数据,编号为1到12,使用Matlab绘制不同环境下两种算法的对比曲线图(图2、图3)。
在图3中,配准率越大,检测出的特征点稳定性越高;反之,稳定性越低。由图3可知,Adam图像组,优化的特征点检测方法特征点配准率明显高于SIFT特征点检测方法。Trees图像组、Leuven图像组、UBC图像组、Graffiti图像组,优化算法和SIFT的特征点配准率相近。Boat图像组,SIFT特征点检测方法配准率明显高于优化算法。但是,由图2可知,优化算法的检测时间明显低于SIFT特征点检测方法。
4 结论
通过综合对比分析可知,SIFT方法所检测的特征点稳定,但是运算时间长,效率低。本文提出的优化方法,计算量相对较少,检测效率较高,特别是对于旋转变化的图像具有较高的特征点稳定性、特征点配准率以及较高的检测效率,明显优于SIFT方法,但是对于较大尺寸缩放条件下优化算法配准效果还有待提高。故本文提出的优化方法还存在一定不足,有待进一步的完善。
[1]刘佳,傅卫平,王雯,等.基于改进SIFT算法的图像匹配[J].仪器仪表学报,2013(5):1107-1112.
[2]柯杉,王博亮,黄晓阳.一种改进的SIFT算法及其在医学图像配准中的应用[J].厦门大学学报:自然科学版,2010(3):354-358.
[3]Oxford.Visual geometry group-affine covariant regions datasets[EB/OL].(2004-09-19)[2015-07-07]. http://www.robots.ox.ac.uk/~vgg/data/data-aff.html.
[4]李刚.疯狂Android讲义[M].2版.北京:电子工业出版社,2014.
[5]Lowe D.Distinctive image features from scale-invariant key-point[J].International Journal of Computer Vision,2004(2):91-110.
An Optimization of SIFT Algorithm Based on Mobile Platform
MA Shu-xiang,YANG Hui-wei
(Information Engineering Institute,Wuhu Institute of Technology,Wuhu Anhui 241001,China)
Through the rapid construction of low-frequency information and the feature point detection of the image,simplified SIFT (Scale Invariant Feature Transform) image matching algorithm for a Gaussian spatial structure complexity to improve the efficiency of feature point detection and improve the algorithm running speed in mobile devices. Finally,the optimization algorithm and SIFT algorithm are compared in the Android platform. The experimental results show that the optimization algorithm ensure the registration effect and improves the detection speed of the feature points in a variety of scenarios,especially the effect of the rotation change is better.
low frequency image;feature points detection;registration
2016-04-01
安徽省自然科学重点项目“基于目标特征提取的公共交通车辆客流量检测系统设计与实现”(KJ2016A758)。
马书香(1982- ),女,讲师,硕士,从事计算机控制与图像处理研究。
TP391
A
2095-7602(2016)10-0039-04
