插电式混合动力汽车能耗及其影响因素分析
2016-12-08陈雪平张海亮钟再敏陈辛波
陈雪平, 张海亮, 钟再敏, 陈辛波
(1.同济大学 汽车学院,上海 201804; 2.上海汽车集团股份有限公司,上海 200041)
插电式混合动力汽车能耗及其影响因素分析
陈雪平1, 张海亮2, 钟再敏1, 陈辛波1
(1.同济大学 汽车学院,上海 201804; 2.上海汽车集团股份有限公司,上海 200041)
通过建立插电式混合动力汽车(plug-in hybrid electric vehicle, PHEV)的前向仿真模型,对其能耗进行仿真,并分析PHEV能耗的使用影响因素.基于Modelica物理建模语言,搭建PHEV整车动力传动及纵向动力学模型,并在标准测试工况下仿真整车各部分能耗变化.针对影响PHEV能耗的使用因素,重点仿真分析表征行驶工况的平均车速和驾驶激进性对电量消耗(charge deplete, CD)阶段电耗和电量保持(charge sustain, CS)阶段油耗的影响规律.通过分析不同车速与驾驶激进性下各部分能耗以及动力部件工作效率的影响,揭示了行驶工况对能耗影响规律的内在机理.
插电式混合动力汽车; 能耗; Modelica语言; 行驶工况; 驾驶激进性
插电式混合动力汽车(PHEV)既能通过获取电网电能而充分降低燃油消耗,又不完全依赖充电基础设施,是一种成本相对较低,容易实现的过渡性电动汽车解决方案[1].PHEV通常具有多种工作模式,不同模式之间能耗差异明显,受用户使用方式影响显著[2],具有复杂的能耗特征.基于仿真方法的能耗研究成本低、易操作,且更易揭示能耗影响规律.目前国内外学者都是利用Simulink[3],ADVISOR[4],AVL CRUISE[5],PSAT[6]等成熟商业软件对混合动力汽车能耗进行仿真分析.基于Simulink的建模仿真采用信号流方式,因果关系在建模阶段确定,不易搭建复杂物理对象模型,而且模型可移植性较差.商业仿真平台CRUISE和PSAT基于物理建模方法,但其提供的模型封闭,仅对研究者提供参数定义接口,其内部不可修改也不可见,无法满足许多特定模型需求.
Modelica是面向对象、多领域物理建模语言[7],目前已有多个基于Modelica语言的建模与仿真平台,其应用日益广泛.Modelica的陈述式特性非常适合用于搭建车辆正向仿真模型.
影响车辆能耗的因素可总结为结构和使用方式两方面[8].对于PHEV,由于其多能量源(发动机和动力电池)及其引起的多工作模式的存在,使得其能耗受用户使用方式与环境等因素的影响更显著,因此,研究使用方式对能耗的影响规律对车辆设计和用户使用都具有重要意义.
本文首先针对PHEV能耗影响因素特征,以某PHEV为研究对象,建立用于正向仿真的整车Modelica模型,然后仿真分析了PHEV在NEDC(new european driving cycle)循环工况中的能耗组成,最后仿真分析PHEV能耗受不同行驶工况的影响规律及其内在机理.
1 PHEV仿真模型
1.1 PHEV整车模型架构
通过建立描述车辆纵向动力学特征的PHEV模型以计算能耗,该模型参考Modelica模型库VehicleInterfaces中的顶层设计模式,采用前向仿真结构,如图1所示.仿真系统中的控制信号通过总线结构进行通信.
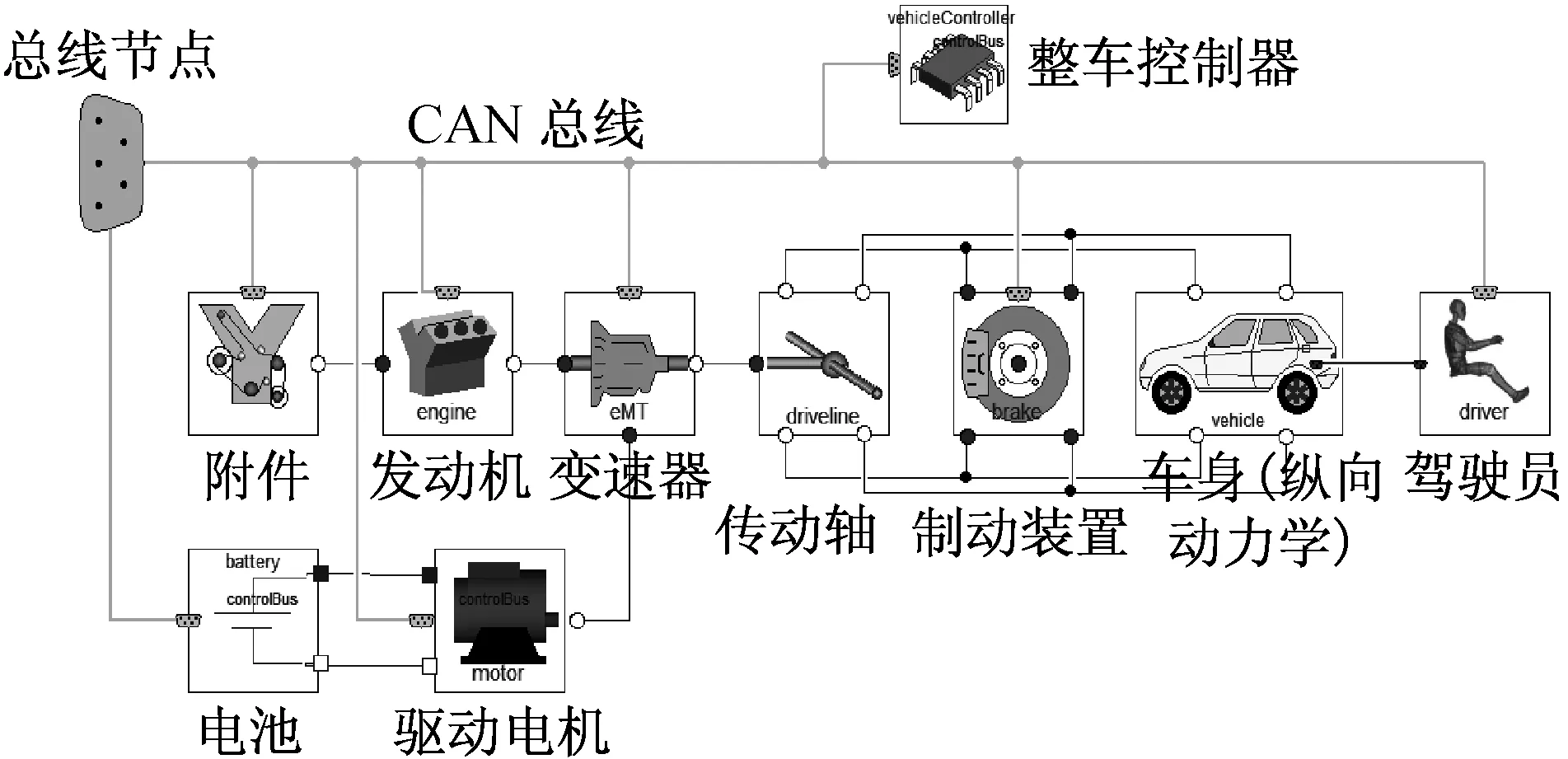
图1 基于Modelica的PHEV纵向动力学模型
Fig.1 Longitudinal dynamic model of PHEV using Modelica
整车主要参数如表1所示.
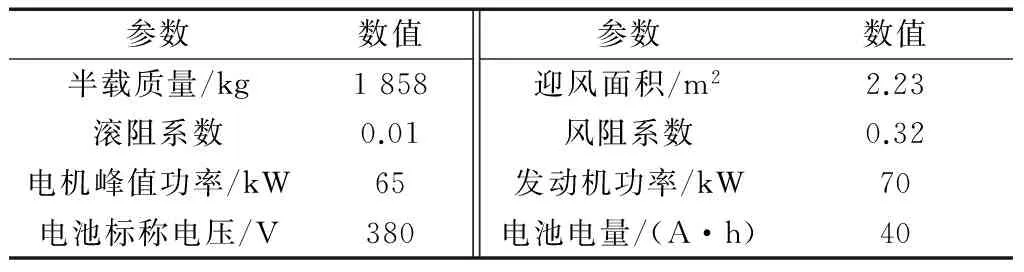
表1 整车参数
模型基于Modelica语言搭建,包括动力系统、传动系统、车身、轮胎、制动系统等.该PHEV为并联、插电式混合动力车,基于NEDC标准测试工况,对其能耗研究分为CD阶段的电耗(electrical consumption, EC, kW·h·(100 km)-1)和CS阶段的油耗(fuel consumption, FC, L·(100 km)-1)两方面.
1.2 基于Modelica的关键部件模型
对于PHEV经济性的仿真,发动机和驱动电机这两个能量转换模块的建模至关重要.
1.2.1 发动机
本文采用试验建模法搭建汽油发动机模型,即在建立模型前通过试验获得发动机转矩、转速、燃油消耗等数据,采用查表或数据拟合方式得到发动机的工作特性.所搭建的发动机本体模型能模拟以下工作过程和特性:①启动和停机过程.启动过程将发动机转速从0升高到怠速区间;停机过程输出发动机内部阻力产生的负转矩.②动力输出动态特性.根据节气门开度目标值及发动机当前转速得出相应输出转矩,通过惯性环节模拟输出扭矩的动态响应.③燃油消耗动态特性.根据发动机当前转矩、转速以及节气门开度变化率得出相应燃油消耗率.
1.2.2 驱动电机
驱动电机选用插入式永磁同步电机.为提高仿真速度,驱动电机建模同样采取实验法,基于电机速度-转矩特性以及效率特性曲线,建立其稳态动力学Modelica模型[9],如图2所示.
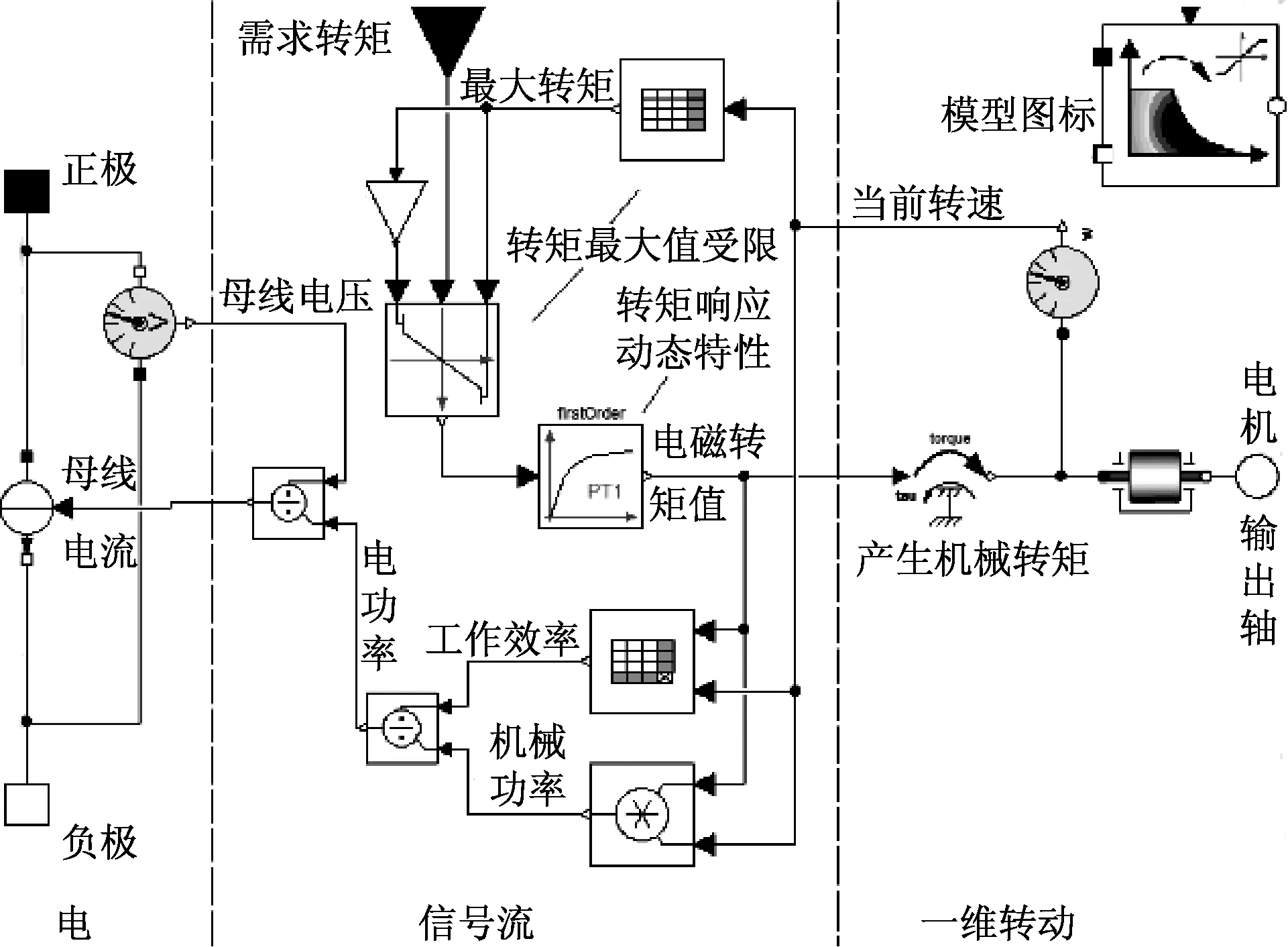
图2 驱动电机稳态模型拓扑图
1.2.3 驾驶员模型
为实现仿真按既定工况运行,正向仿真时需通过建立驾驶员模型,使其在能够反映工况需求的前提下尽可能模拟真实驾驶员的操作过程.本文的驾驶员模型主要根据给定工况和实际车速计算加速踏板和制动踏板位置,是典型因果模型.算法主体是车速闭环,以及修正车速偏差的比例积分(PI)调节.
1.3 能耗模型
PHEV的能量消耗主要包括发动机内阻消耗、电池内阻消耗、电机能量转换消耗、传动系机械损耗、制动损耗以及整车阻力损耗.通过建立随工况变化的制动力矩模型实现模拟发动机内阻损耗;通过建立等效内部电阻模型实现模拟电池内阻损耗;通过插入电机工作效率随工况变化的二维表格实现模拟电机能量转换消耗;传动系机械损耗包括离合器摩擦损耗、齿轮传动损耗以及轴承摩擦损耗,第一项由摩擦片间滑动摩擦力和相对转速确定,第二、三项能耗的模拟通过试验获得的齿轮传动效率及轴承摩擦力两个二维表格实现;制动损耗由制动盘与轮毂间摩擦力和相对转速决定;整车阻力包括加速阻力、轮胎与地面的滚动阻力、坡道阻力以及风阻.
1.4 控制策略
整车动力系统能量管理采取简单易行的逻辑门稳态控制策略实现,即根据动力电池荷电状态(stage of charge, SOC)确定PHEV在CD还是CS模式工作,再根据目标扭矩计算值和当前车速判断CD模式下发动机是否开启、应输出的转矩值,以及CS模式下电机应输出的转矩值.
制动能量回馈控制策略采用串联式,即最大限度回收制动能量[13].所搭建的车辆模型为前驱车型,前轮可提供机电复合制动,后轮只能提供机械制动.根据驾驶员制动强度,在满足前后制动力分配法规以及保证紧急制动时制动安全前提下,确定电机制动力.当车速过低时,由于电枢反电动势过低而导致再生制动失效,电机制动力迅速降为零.
2 PHEV能耗组成仿真分析
2.1 CD阶段综合电耗
CD阶段主要由动力电池提供能量驱动车辆按照给定循环工况行驶.行驶过程能量的消耗主要包括电池损耗、电机损耗、传动系能耗、制动能耗、轮胎与路面之间的滚动阻力能耗以及风阻能耗6部分,单个NEDC循环工况内的各部分能耗的变化过程及最终分布如图3、图4所示.
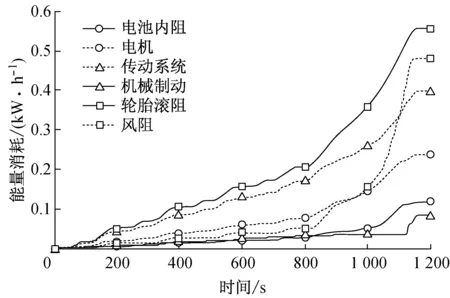
图3 CD模式下的能耗变化
如图5所示,仿真过程车辆行驶11.03 km,其中电池消耗电量1.75 kW·h,发动机消耗汽油0.066 L.根据汽油热值,即每升汽油的能量等效为8.9 kW·h,折算成电量后的百公里综合电耗ECD为16.46 kW·h.

图4 CD模式NEDC工况下的能耗分布
Fig.4 Energy consumption distribution following NEDC at CD stage
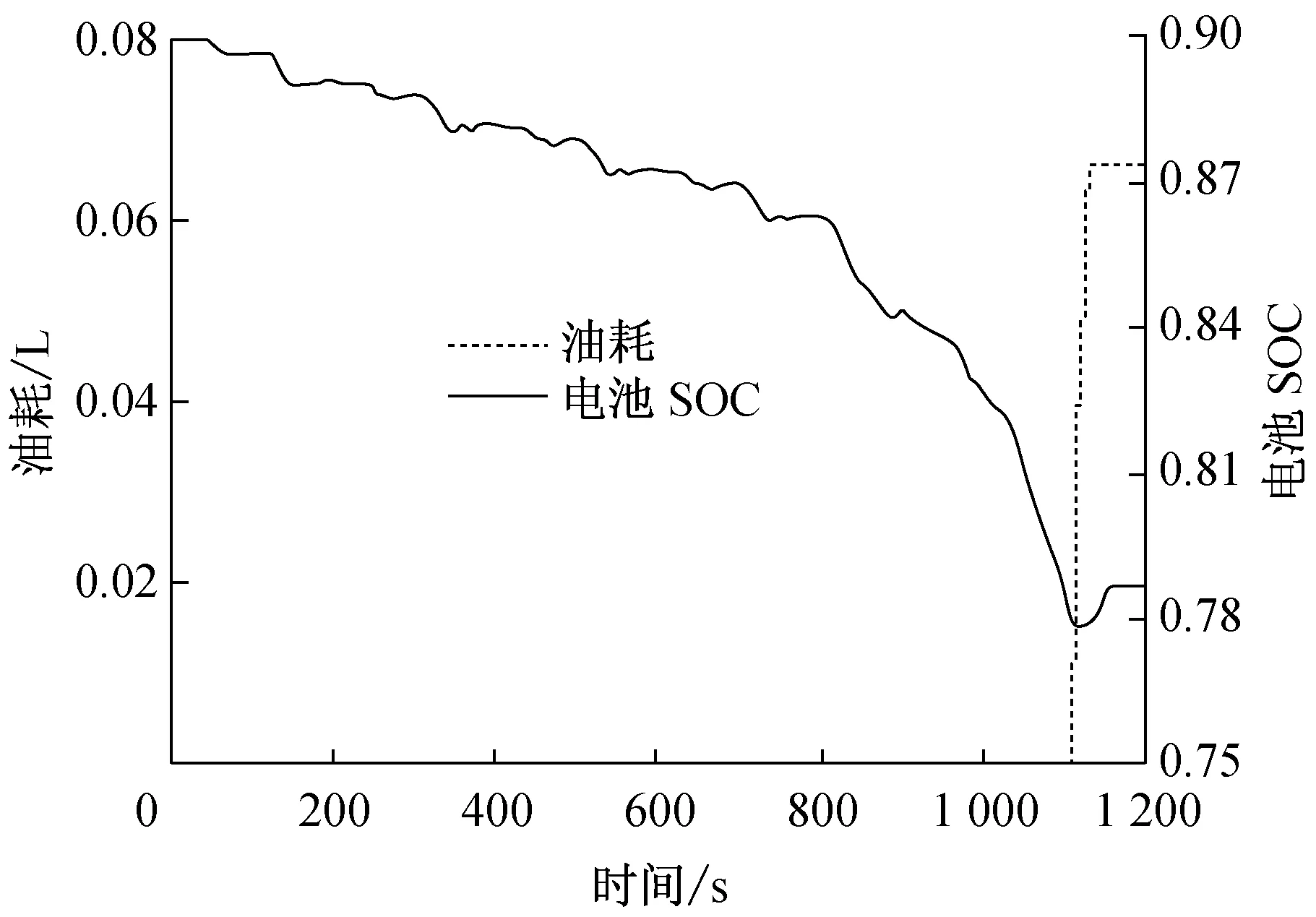
图5 CD模式下的NEDC工况电耗与油耗
2.2 CS阶段综合油耗
电量保持CS阶段,车辆动力主要来自发动机.较之CD模式,车辆内部阻力增加了发动机内部摩擦阻力及其附件损耗,如图6、图7所示.
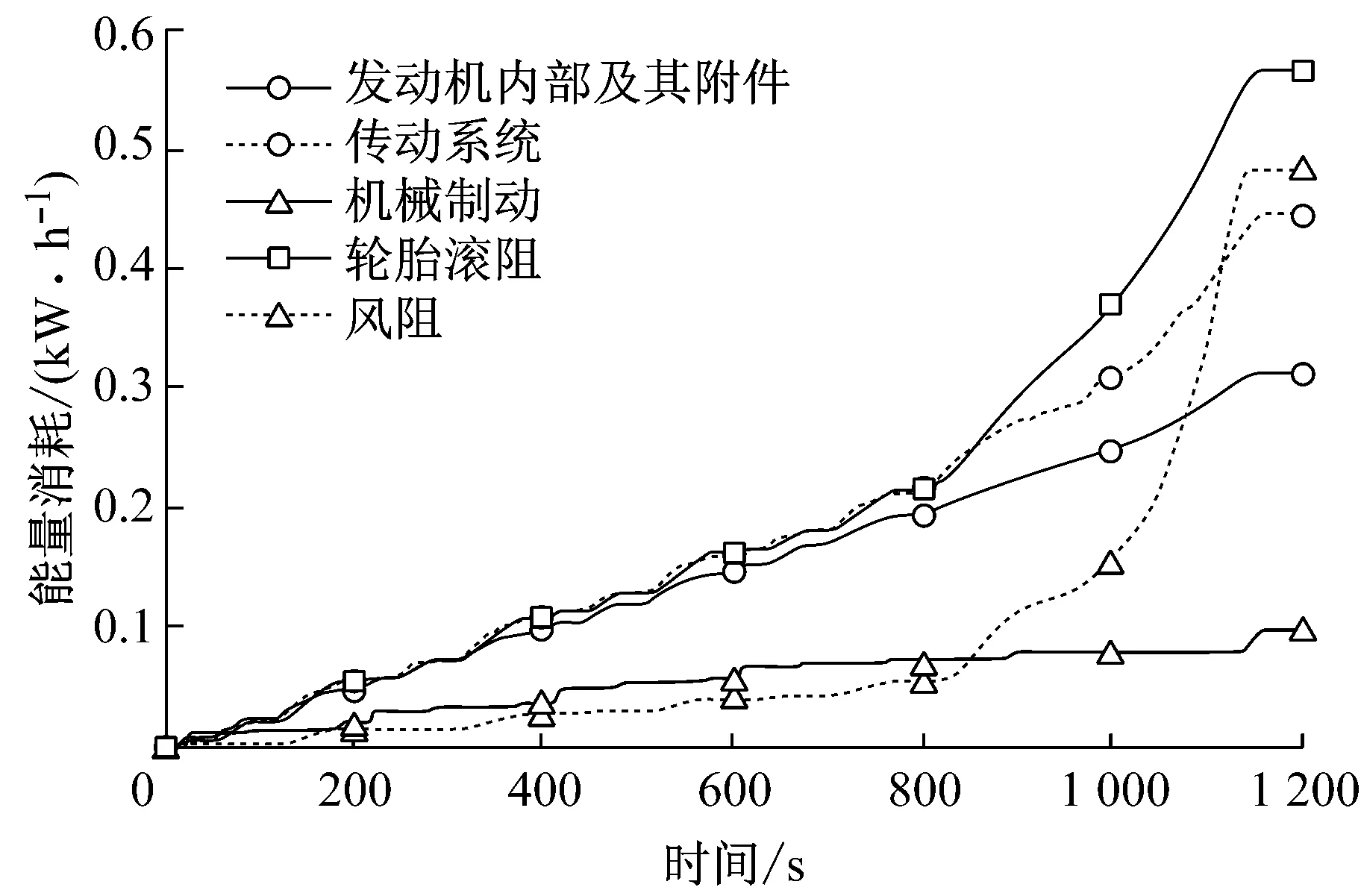
图6 CS模式下的能耗变化
图8显示NEDC单循环工况内发动机消耗0.97 L汽油,电池电量增加0.35 kW·h,按照能量等效成百公里油耗为8.66 L.
3 能耗影响因素仿真分析
3.1 工况参数
通常用平均车速、平均加/减速度、怠速时间比3个特征参数反映不同行驶工况[9].怠速时间比对应动力系统的工作时间.车速与加/减速度会对动力系统的工作点以及能耗分布造成影响,因此本文只对这两个参数对能耗的影响进行仿真分析.文献[11]提出用一个“驾驶强度(driving intensity)”参数统一表征平均车速和平均加/减速度.本文为了区别二者对PHEV能耗的影响规律,将反映驾驶员驾驶车辆激进程度的加/减速度以激进因子G表示,令标准NEDC工况对应的G为1.
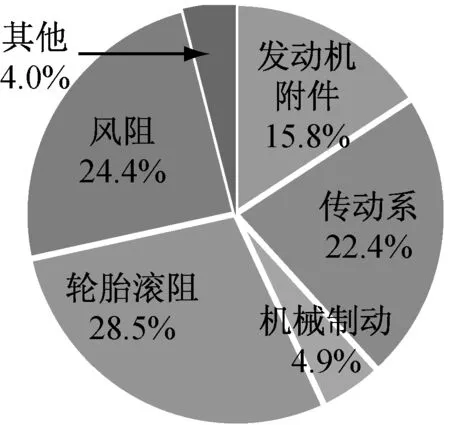
图7 CS模式NEDC工况下的能耗分布
Fig.7 Energy distribution following NEDC cycle at CS stage
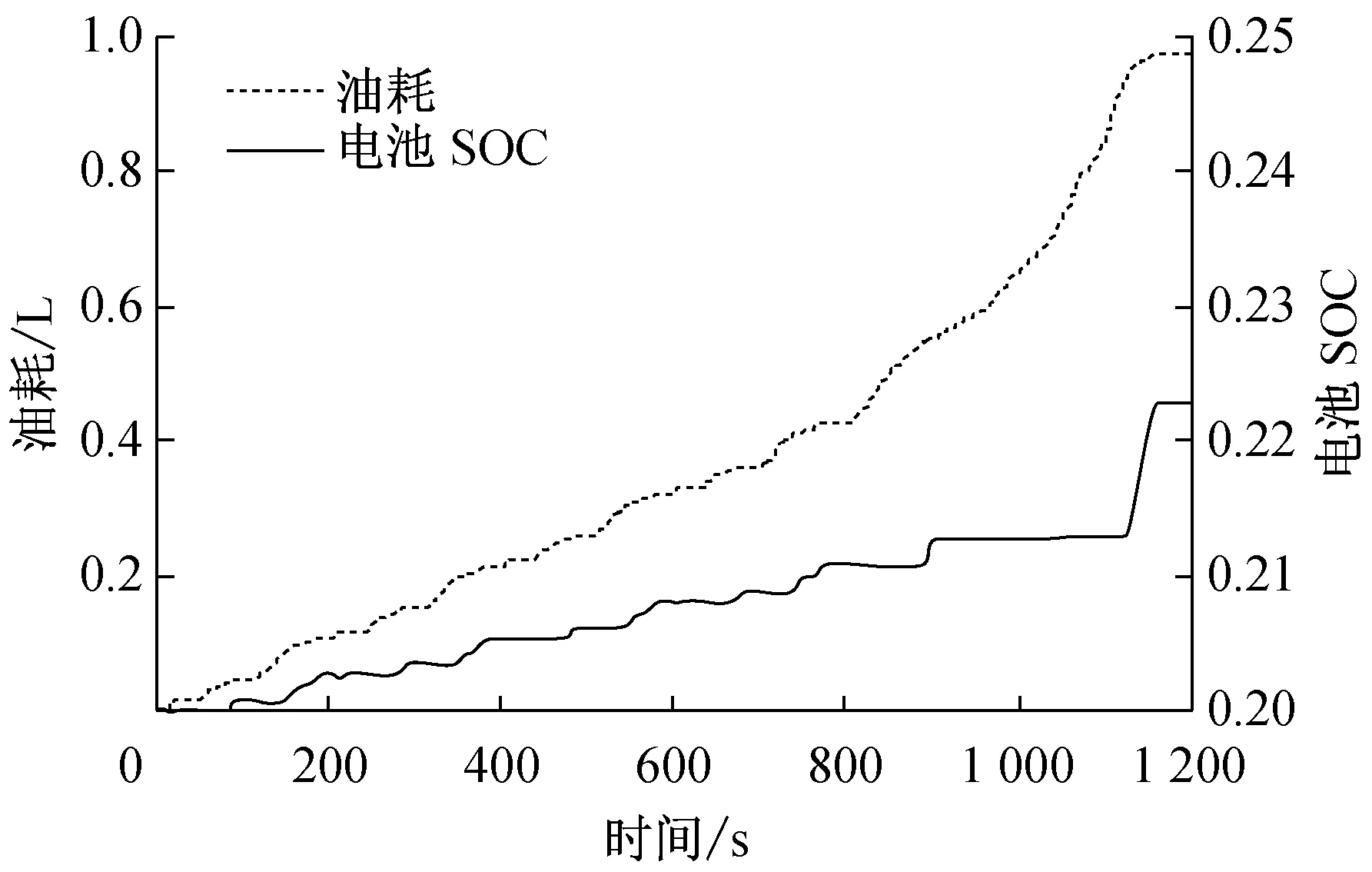
图8 CS模式NEDC工况下的油耗和电耗
基于标准NEDC工况分别衍生出不同平均车速和激进因子的循环工况曲线.图9所示为标准NEDC工况以及1.3倍车速和激进因子的NEDC曲线.值得注意的是,衍生工况的最高车速受限于当前驱动部件的最高转速及其最大功率.
3.2 CD电耗影响
图10为CD模式下百公里电耗随平均车速和驾驶激进性的变化曲线.平均车速较低时电耗随车速增大而减小,至29.1 km·h-1达到最小.车速继续增大,则电耗也逐渐增大.而驾驶激进性增大总会导致电耗增加,只是开始阶段电耗增加速率较小.
进一步分析并比较电耗峰/谷值对应的行驶工况与标准NEDC工况下各部分能耗.
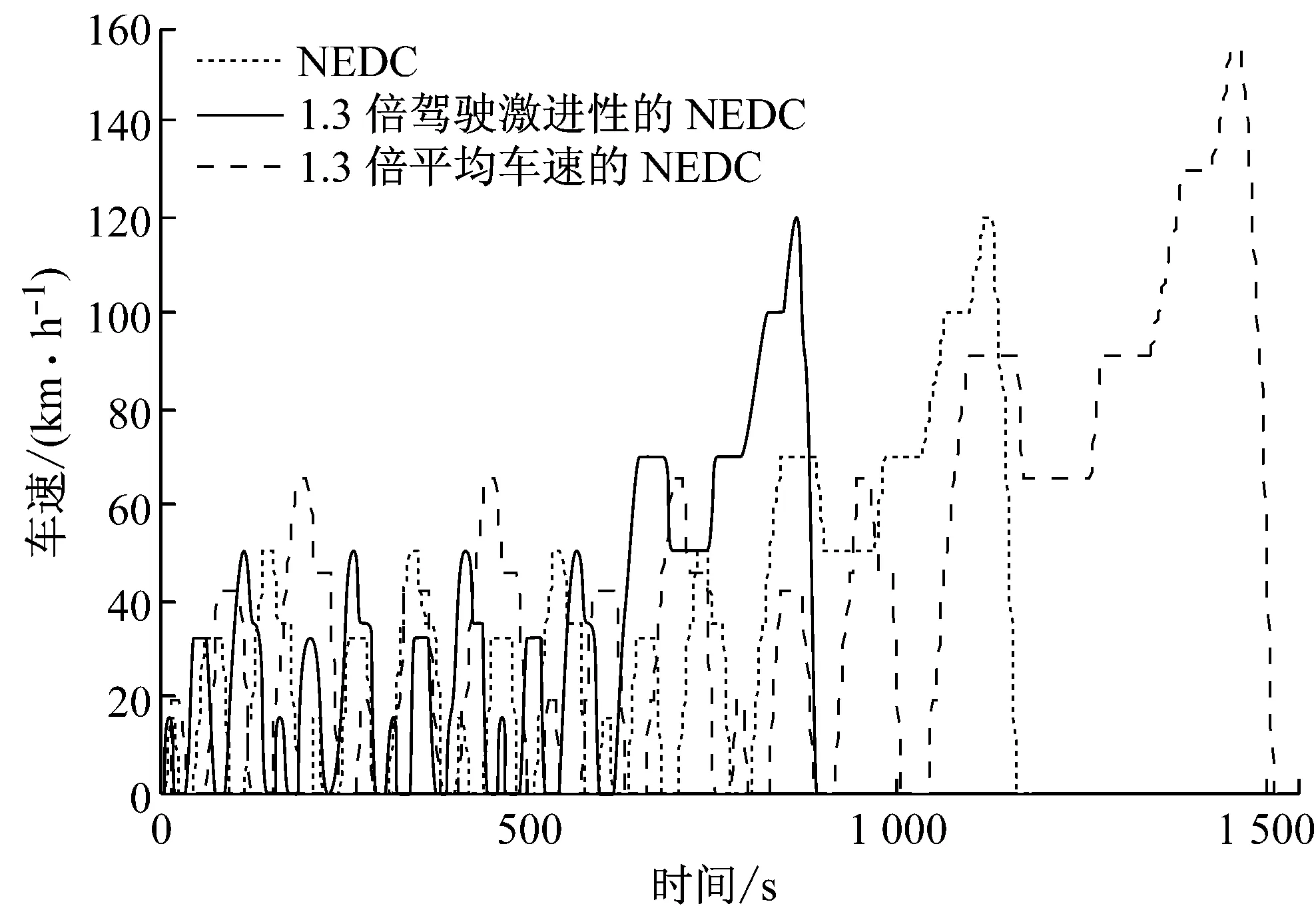
图9 不同NEDC工况曲线
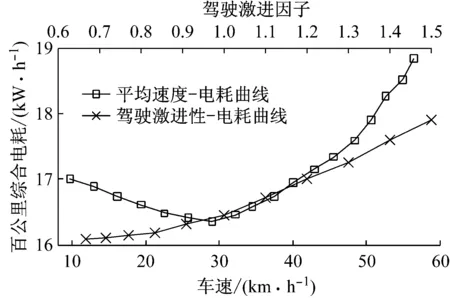
图10 行驶工况对电耗的影响
图11为平均车速分别为29.1和54.9 km·h-1时单位行驶里程内各部分能耗相对于平均车速为32.3 km·h-1,即标准NEDC工况下各部分能耗的变化.由于驾驶行为对滚阻几乎没有影响,因此不考虑滚阻能耗的变化.车速越低,电机负荷越小,效率越低,能够回馈的能量也越低,二者导致车速影响下的CD电耗曲线的前半段电耗随车速增大而下降.后半段电耗上升主要是因为风阻、传动系统等能耗的增加.高速行驶时,大功率需求使得控制器启动发动机参与车辆驱动.由于发动机热效率远低于电机机电转换效率,因此油耗等效成电耗后将增大整车的平均电耗.
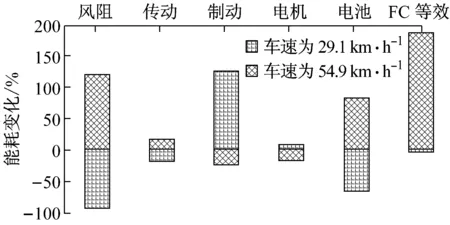
图11 CD模式平均车速对各部分能耗的影响
Fig.11 Influences on each energy consumption component from average vehicle speed on CD stage
图12所示为驾驶激进性因子分别为0.67和1.50时单位行驶里程内的各部分能耗相对于标准NEDC工况下各部分能耗的变化.风阻由车速决定,因此其能耗不受驾驶激进性影响.驾驶激进性越高表明加/减速度越大,则驾驶员作用于油门踏板和制动踏板深度越大,分别导致电机处于低速大扭矩的低效率区间的概率增大以及电机制动力的减少.大油门操作也使发动机工作更频繁,增加了油耗.
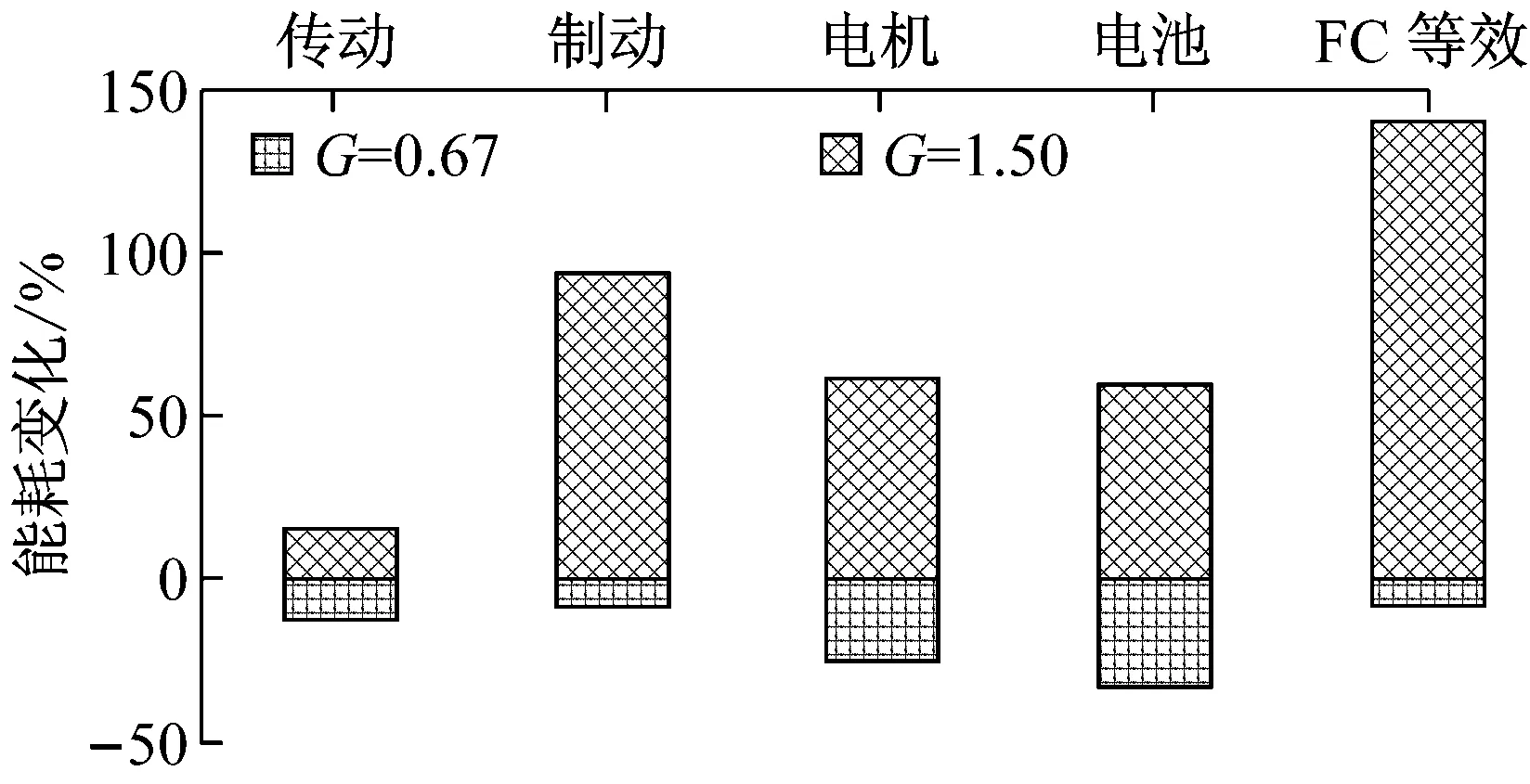
图12 CD模式驾驶激进性对各部分能耗的影响
Fig.12 Influences of driving aggressiveness at CD stage on each energy consumption component
3.3 CS油耗影响
图13为CS模式下的油耗随平均车速和驾驶激进性的变化曲线.驾驶激进性对CS油耗的影响趋势与其对CD电耗的影响一致,但敏感度更高.CS油耗受平均车速影响呈现两端升高,中间下降的趋势.
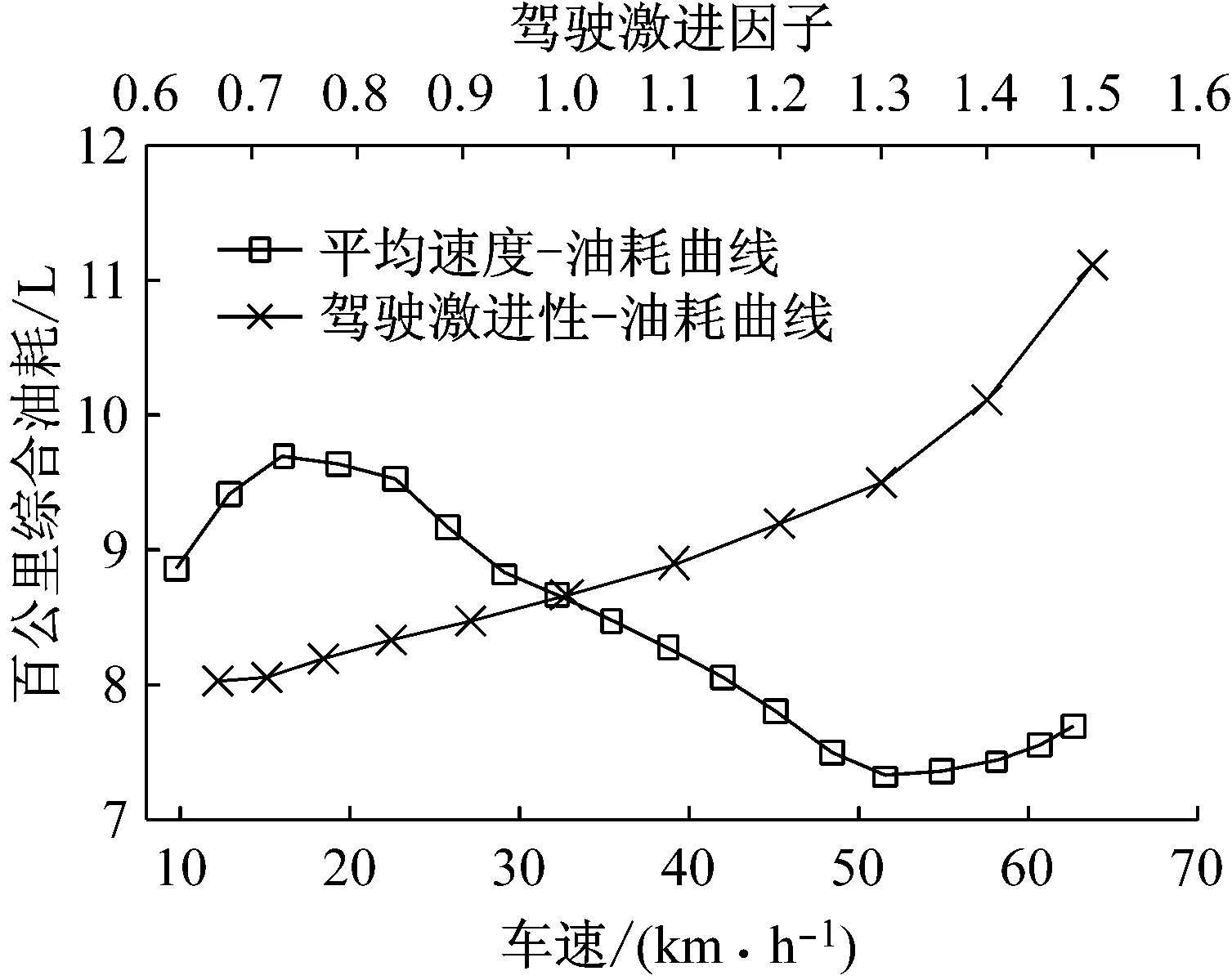
图13 行驶工况对油耗的影响
Fig.13 Influence of driving cycles on fuel consumption
CS模式下,风阻、传动系统、机械制动能耗与CD模式一致,与滚阻能耗归并为其他项,较之CD模式能耗增加了发动机附件一项,如图14所示.选取平均车速分别为12.9 km·h-1和62.8 km·h-1时单位行驶里程内各部分能耗与标准NEDC工况下各部分能耗进行比较.车速影响下的CS油耗曲线的前小段油耗上升主要是因为电机驱动比例,即EC等效油耗的下降,中间段下降主要是发动机平均燃油燃油消耗率的降低,车速越高,发动机负载越大,工作在高效区的概率越大,因此能耗越低,如图15所示(图中数字表示发动机燃油消耗率,g·(kW·h)-1).后小段上升主要是因为风阻等能耗的增大.
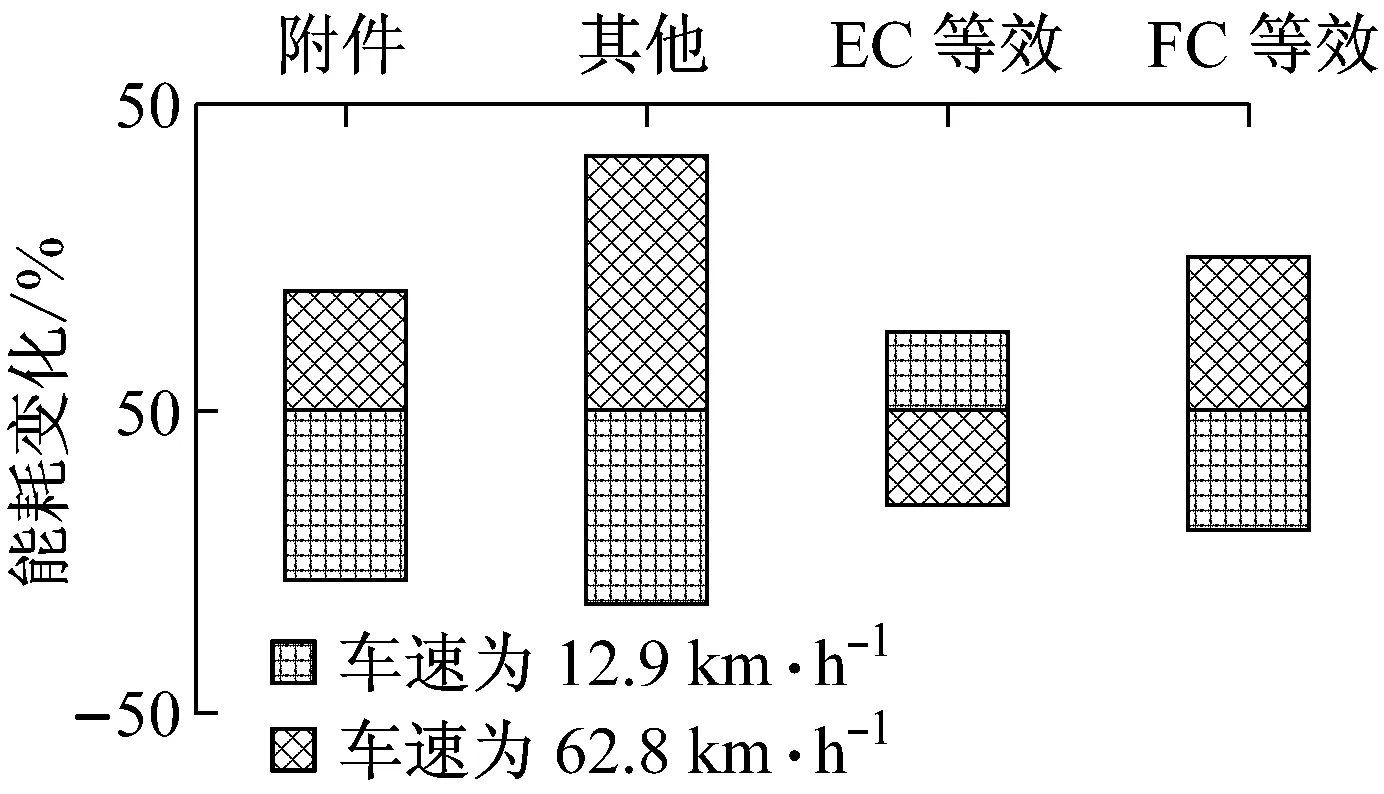
图14 CS模式平均车速对能耗和发动机燃油消耗率的影响
Fig.14 Influences of average vehicle speed at CS stage on each energy consumption component and fuel consumption rate
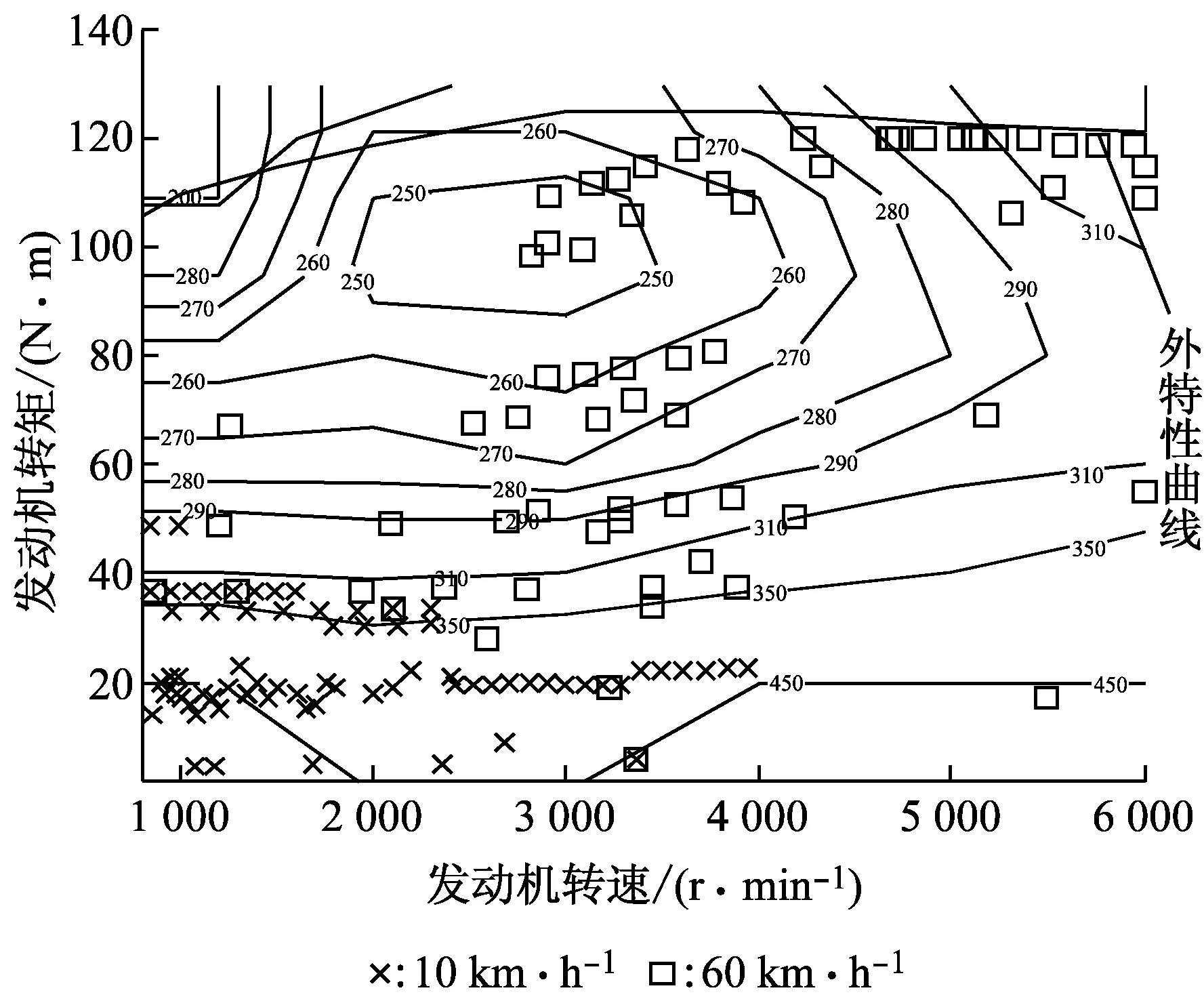
图15 CS模式不同平均车速下发动机工作点分布
Fig.15 Influences of average vehicle speed at CS stage on distribution of engine working points
图16为驾驶激进性因子分别为0.67和1.50时单位行驶里程内的各部分能耗相对标准NEDC工况下能耗的变化.驾驶激进性影响下的CS油耗曲线上升是因为总能耗和发动机燃油消耗率的增大.
综合比较CD电耗与CS油耗受平均车速和驾驶激进性代表的行驶工况的影响,如表2所示.
油耗受驾驶行为的影响较之电耗更大,二者均随驾驶激进增大而升高.但平均车速对二者的影响规律不同,电耗的最低点在平均车速的中低段,油耗的最低点处于平均车速的偏高速段.

图16 CS模式驾驶激进性对能耗和发动机燃油消耗率的影响
Fig.16 Influences of driving aggressiveness at CS stage on each energy consumption component and fuel consumption rate
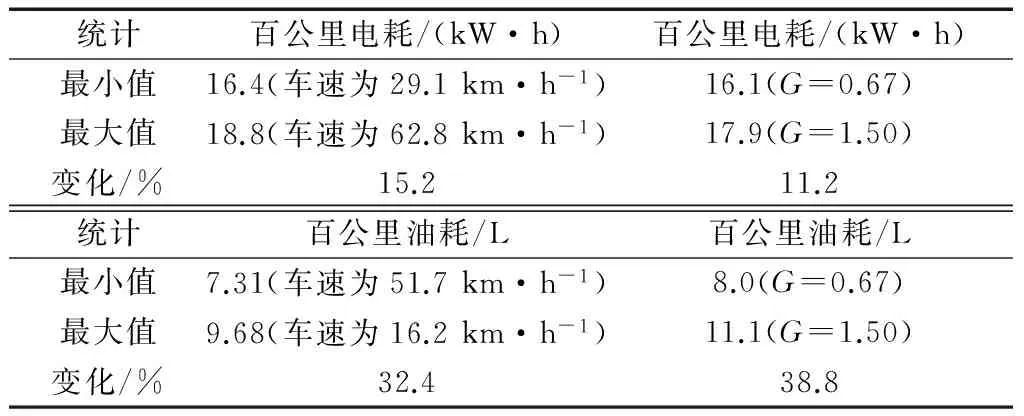
表2 电耗和油耗受驾驶工况影响统计
4 结语
(1)基于Modelica物理建模语言搭建的PHEV整车模型进行能耗仿真,由于其完全开放特性,不仅可以节约软件成本,而且能够为研究者提供可靠且高效的正向仿真平台.
(2)以平均车速和驾驶激进性表征影响车辆能耗的行驶工况因素.无论是CD电耗还是CS油耗,都随驾驶激进性升高而增大.CD电耗随平均车速增大先减小后增大,最低点处于中低速段,而CS油耗随平均车速增大先增大,然后减小,最后增大,最低点处于中高速段.
(3)对在用PHEV能耗的使用因素影响进行了仿真分析,有助于用户了解驾驶行为与能耗的关系,指导用户更经济地使用PHEV.
[1] Bradley T H, Frank A A. Design, demonstrations and sustainability impact assessments for plug-in hybrid electric
vehicles[J]. Renewable and Sustainable Energy Reviews, 2009, 13(1): 115.
[2] 彭文明.插电式混合动力电动汽车能耗研究[D].武汉:武汉理工大学,2013.
PENG Wenming. Investigation on the energy consumption of PHEV[D]. Wuhan: WuHan University of Technology, 2013.
[3] 黄贤广,何洪文.混合动力车辆动力系统建模与仿真[J].车辆与动力技术,2008(2):43.
HUANG Xianguang,HE Hongwen. Modeling and simulation of a HEV powertrain system[J]. Vehicle & Power Technology, 2008(2): 43.
[4] 曾小华, 王庆年, 李骏, 等. 基于ADVISOR2002混合动力汽车控制策略模块开发[J]. 汽车工程, 2004, 26(4): 394.
ZENG Xiaohua, WANG Qinnian, LI Jun,etal. The development of HEV control strategy module based on ADVISOR2002 software[J]. Automotive Engineering, 2004, 26(4): 394.
[5] 王庆年, 于永涛, 曾小华, 等. 基于CRUISE软件的混合动力汽车正向仿真平台的开发[J]. 吉林大学学报: 工学版, 2009,39(6): 1413.
WANG Qingnian, YU Yongtao, ZENG Xiaohua,etal. Development of forward-looking simulation platform for hybrid electric vehicle based on software CRUISE[J]. Journal of Jilin University: Engineering and Technology, 2009,39(6): 1413.
[6] Freyermuth V, Fallas E, Rousseau A. Comparison of powertrain configuration for plug-in HEVs from a fuel economy perspective[C]∥SAE 2008 World Congress & Exhibition. Warrendale: SAE International, 2008: 2008-01-0461.
[7] Fritzson P. Principles of object-oriented modeling and simulation with Modelica 2.1[M]. Hoboken: Wiley Interscience, 2004.
[8] Carlson R B, Shirk M G, Geller B M. Factors affecting the fuel consumption of plug-in hybrid electric vehicles[C]∥The 25th World Battery, Hybrid and Fuel Cell Electric Vehicle Symposium & Exhibition(EVS 25). Shenzhen: EVS, 2010: 1-9.
[9] Kessler M, Andres M, Schmitt T. Control and characteristic map generation of permanent magnet synchronous machines and induction machines with squirrel cage[C]∥10th International Modelica Conference. Lund: Modelica Association and Linkoping University Electronic Press, 2014: 1151-1160.
[10] 段幼华. 混合动力轿车复式制动系统的研究[D]. 长春:吉林大学,2007.
DUAN Youhua. Study on regenerative braking system of hybrid electric car[D]. Changchun: Jilin University, 2007.
[11] Carlson Richard Barney, Lohse-Busch Henning, Duoba Michael,etal. Drive cycle fuel consumption variability of plug-in hybrid electric vehicles due to aggressive driving[C]∥SAE 2009 World Congress & Exhibition. Warrendale: SAE International, 2009: 2009-01-1335.
Simulation and User Factors Analysis of Energy Consumption of Plug-in Hybrid Electric Vehicles
CHEN Xueping1, ZHANG Hailiang2, ZHONG Zaimin1,CHEN Xinbo1
(1. School of Automotive Studies, Tongji University, Shanghai 201804, China; 2. SAIC Motor Co., Ltd., Shanghai 200041, China)
The energy consumption of plug-in hybrid electric vehicles (PHEVs) was simulated using forward-facing stream of calculations, and the user influence factors of the economy of PHEVs were discussed. Then, the model of powertrain and longitudinal dynamics system of PHEVs were built based on Modelica language and utilized to simulate the fuel consumption of Charge-sustaining (CS) mode and electric consumption of Charge-depleting (CD) mode under the standard driving cycle. Finally, the influencing mechanism of average driving speed and driving aggressiveness on CS fuel and CD electrical consumption was obtained by analyzing the energy consumption of each consuming component and the engine thermal efficiency.
plug-in hybrid electric vehicles; energy consumption; Modelica language; driving cycles; driving aggressiveness
2015-11-14
国家自然科学基金(51575392)
陈雪平(1987—),男,博士生,主要研究方向为新能源汽车动力系统控制.E-mail:1210083@tongji.edu.cn
U469.7
A