山区高速公路相邻组合路段设计安全评估
2016-12-08王雪松吴杏薇
王雪松, 刘 姣, 吴杏薇
(1.同济大学 道路与交通工程教育部重点实验室,上海 201804; 2.华盛顿大学 土木工程系,西雅图 98195)
山区高速公路相邻组合路段设计安全评估
王雪松1, 刘 姣1, 吴杏薇2
(1.同济大学 道路与交通工程教育部重点实验室,上海 201804; 2.华盛顿大学 土木工程系,西雅图 98195)
利用驾驶模拟技术,基于湖南省永吉高速公路道路设计参数及周边地形环境参数,搭建了山区高速公路驾驶场景.以直线与平曲线及平曲线与平曲线两类相邻组合路段为研究对象,从实验设计、数据处理、指标选取、模型建立方面介绍了以驾驶模拟数据为基础的道路安全评价方法.实验结果表明,直线与平曲线相邻路段,直线长度、运行车速均与断面车速差呈正相关;平曲线与平曲线相邻路段,前一平曲线路段长度、前后平曲线半径之比均与断面车速差呈正相关.根据断面车速差分布特征,可将相邻组合路段线形安全性划分为“GOOD”,“FAIR”和“POOR”.
安全评估; 驾驶模拟器; 山区高速公路; 相邻组合路段; 断面车速差
驾驶员在驾驶车辆过程中,通过获取的道路环境信息,采取相应的驾驶行为控制车辆运行.道路设计线形作为驾驶员获取的一条重要环境信息,直接影响着驾驶员的操纵行为,如方向盘转动、加减速、车速选择等.因此在道路设计过程中应充分考虑驾驶员驾驶行为特性、驾驶能力及所能承担的驾驶负荷,减少驾驶员操作错误的可能性,这也是进行公路安全评价的基本依据.不协调的道路线形,如在相邻组合路段上线形设计元素突变,不仅会诱导驾驶员产生无意识的危险驾驶行为,甚至会令驾驶员感到措手不及而引发不当的驾驶操作[1].因此,通过驾驶员在组合路段上的驾驶行为和车辆运行特征反应道路线形设计中的问题是可行的.
相邻组合路段是指平面设计参数不同的路段相互衔接,例如直线与平曲线相连.驾驶员在山区高速公路驾驶时,在直线路段与平曲线路段过渡,或者不同平曲线之间过渡,容易引起较大的车速变化.相邻路段车速差过大会增加驾驶员不适感,甚至形成安全隐患.我国现有的公路设计规范和标准主要针对单一道路特征断面制定,对于设计要素在相邻组合路段上的规定还停留在定性层面,缺乏组合线形路段设计参数的定量选取标准.对地形复杂地区(如山岭和丘陵地区)公路,可能会出现单一设计要素分别满足规范要求,但是相邻路段组合则出现安全隐患的问题,如长直线接小半径曲线.相邻组合路段的车速一致性是衡量道路安全的重要指标之一.前人的实验研究一般采用断面车速差对相邻组合路段的车速一致性进行评估,并发现相邻组合路段设计参数与断面车速差的部分关系,但是该领域的研究大部分基于国外驾驶员进行,国内几乎还未开展相关研究,现阶段研究成果未充分考虑我国具体驾驶环境、驾驶员驾驶习惯、地形特点等因素,且由于前人实验设备的限制,批量采集驾驶员在不同组合路段上的车辆运行参数较困难,组合线形种类及数量受到限制,难以系统性地检验不同组合路段线形设计对于断面车速差的影响.
运行车速是指在特定路段长度上车辆的实际行驶速度.现阶段在使用运行车速进行公路项目安全性评价时认为, 道路线形变化与运行车速变化具有同步性, 即当道路线形条件发生变化时, 车辆运行车速同时发生变化.运行车速的变化也是道路几何设计不一致的显著指标[2].车速一致性是判断道路线形是否安全的一个重要依据.不适宜的车速选择会导致潜在的安全问题.通常用自由交通流下测定的各类小汽车在车速累计分布曲线上第85个百分位的车辆行驶速度作为运行车速,即v85.对于平曲线设计要素,Bella[3]评估了不同平曲线设计要素及断面配置对车速的影响,发现运行车速不仅受本设计路段的影响,还与相邻路段有关.特别地,Bella[4-5]对直线路段和平曲线路段过渡期间的断面车速差进行研究发现,断面车速差对道路设计一致性具有重要意义.断面车速差反映了连续两个断面间的车速一致性,较大的断面车速差更易成为安全隐患.
《公路工程技术标准》[6]和《公路路线设计规范》[7]均提出了不同设计参数路段衔接应协调,速度过渡应顺适的要求.在2004年颁布的《公路项目安全评价指南》[8]中还引入了高速公路运行车速应用模型.但是现阶段基于运行车速的安全评价应用范围十分有限,并且该指南只是简单针对运行断面车速差的结果进行分级,并未给出组合线形设计参数与运行断面车速差的定量关系,同时,其对运行车速的评价标准是参考美国联邦公路署(Federal Highway Administration,FHWA)的研究成果确定的,未能充分考虑我国具体驾驶环境、驾驶员驾驶习惯、地形特点等因素.
随着高仿真驾驶模拟技术的不断发展,越来越多的研究者开始利用驾驶模拟器分析和解决道路设计中存在的问题.一项美国公路研究项目提出,在道路设计过程中,应积极利用高仿真驾驶模拟器来提高道路设计效率和安全性[9].Wang等[10]基于驾驶模拟器获取的车辆运行数据,系统研究了山区高速公路组合路段对车辆横向加速度的影响.在过去的几年中,多位研究者的主要成果已经证实,先进的驾驶模拟器是研究道路设计问题的有效工具[11].
驾驶模拟器作为一种能够模拟真实道路环境并采集道路设计数据及车辆运行数据的科学工具,为道路线形安全评价提供了数据采集的基础.本文基于湖南省永吉高速公路道路设计参数及周边地形环境参数,在驾驶模拟器中构建山区高速公路进行实验,以直线与平曲线相邻及平曲线与平曲线相邻这两类组合路段为研究对象,分别建立多元线性回归模型,以反映道路设计参数对断面车速差的影响,并根据断面车速差的分布特征,将相邻组合路段线形安全性划分为“GOOD”,“FAIR”和“POOR”.
1 实验设计与数据采集
1.1 道路建模
本实验使用同济大学的交通行为与交通安全虚拟现实平台进行驾驶模拟实验,该实验平台是目前国内最先进的驾驶模拟器系统,系统整体见图1.

图1 同济大学驾驶模拟器
本实验基于湖南省永吉高速公路设计参数及其周边地形环境数据,在驾驶模拟器中精确模拟一条双向四车道山区高速公路,包括平曲线线形、纵断面、横断面和路侧元素,如图2所示.根据实验驾驶员完成实验后填写的“驾驶模拟器场景反馈评价问卷”,简要分析了驾驶模拟器视景的真实度情况.问卷评价内容包括道路标志标线真实性、护栏树木真实性、环境动感真实性等,评价结果为21名驾驶员中超过80%的人认为本实验的实验场景是真实可靠的.
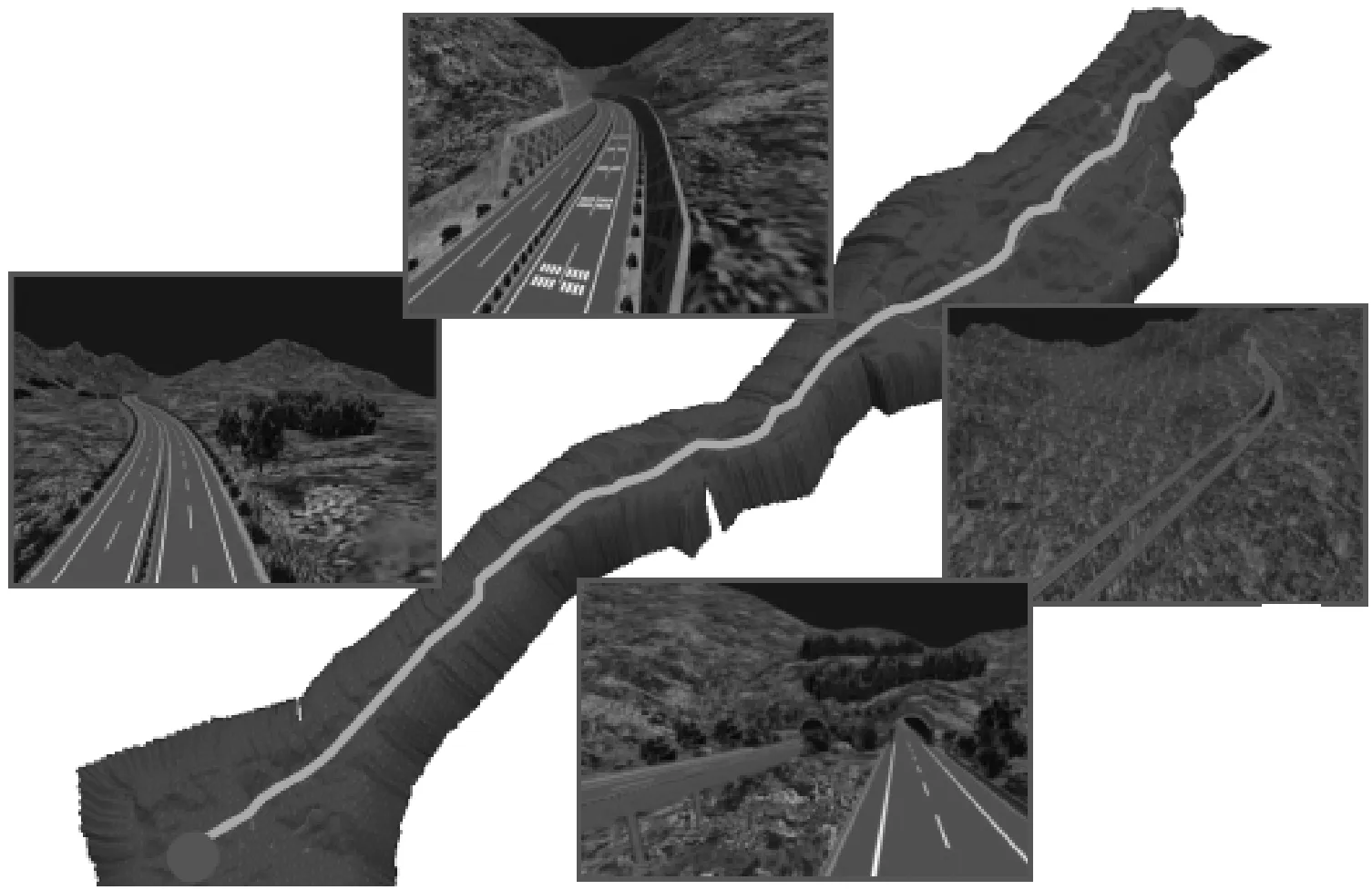
图2 驾驶模拟器场景
本研究依据测试道路的平面线形特点,将路段划分成直线单元和曲线单元(包含圆曲线和缓和曲线)两种类型,双侧共105个路段单元,如表1所示.
选取该模拟高速公路上的69组平面线形组合路段为研究对象,其中直线+平曲线组合路段30组,平曲线+平曲线组合路段39组.
1.2 实验人员
本实验通过海报张贴、网络发布等渠道招募和选择测试驾驶员共22名,其中男性18名,女性4名,征募要求为总驾驶里程至少10 000 km,且每年年均驾驶里程不少于3 000 km.在招募过程中,为保证所收集数据的真实性和有效性,在模拟驾驶过程中若有驾驶员出现较为严重的不适,例如眩晕、恶心和头痛等,则将其从样本中排除.在招募测试驾驶员时,尽可能包含各类职业和年龄段的驾驶员,其中职业包含公交驾驶员、出租车驾驶员、代驾驾驶员、办公文教人员、学生等,由于实验过程中有一名男性驾驶员感到不适,因此总的分析样本为21名驾驶员,其年龄跨度为23~59岁(平均年龄36.5岁,标准差10.4岁),其中年龄小于35岁的8名,35~45岁之间的8名,大于45岁的5名.按驾龄将驾驶员分为新手驾驶员(驾龄<4年)、经验驾驶员(驾龄4~10年)、熟练驾驶员(驾龄>10年),其占总分析样本人数比例分别为23.81%,47.62%,28.57%.
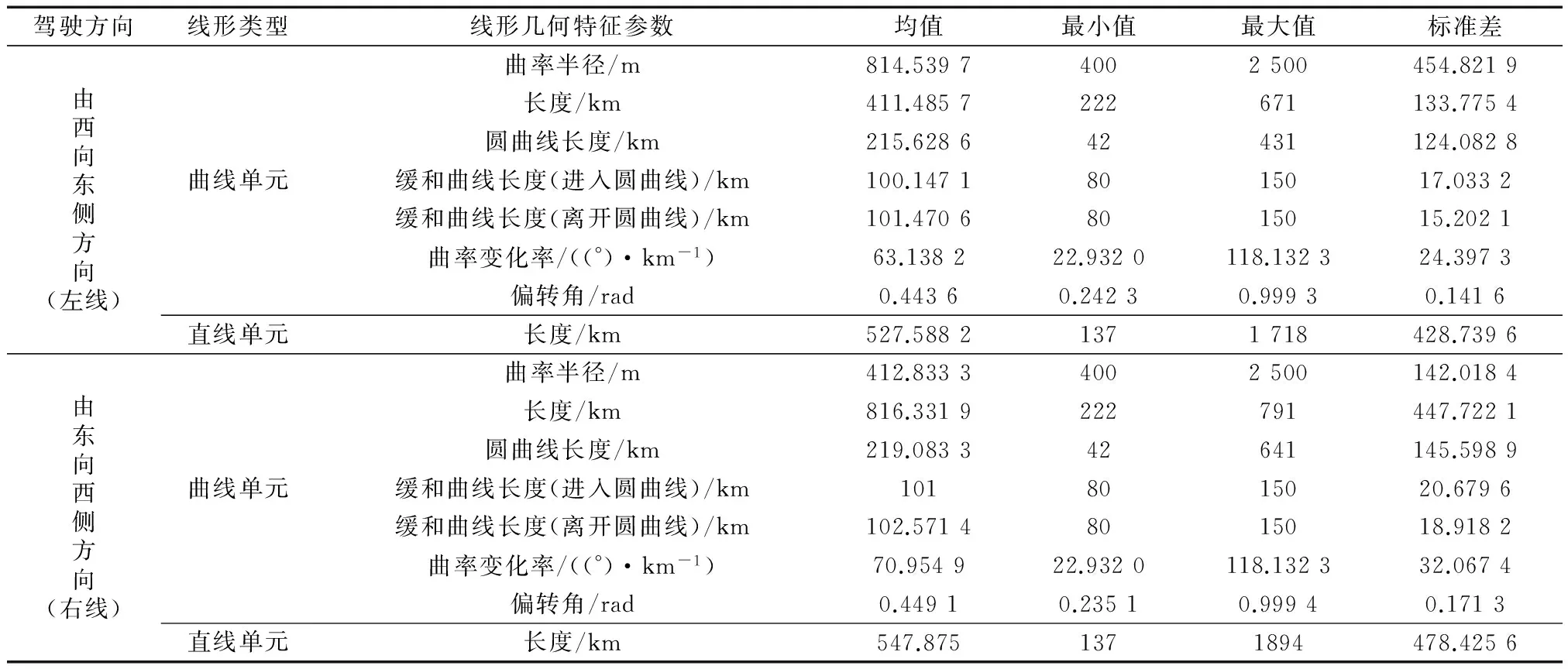
表1 路段线形几何特征
1.3 实验流程
驾驶员在充分了解实验内容并熟悉驾驶环境后,在驾驶模拟器中分别进行由西向东和由东向西两部分驾驶实验.实验场景为白天,路面条件干燥良好,并且两侧路段都保持畅通状态,使其驾驶过程中不受其他车辆干扰.图3所示,分别为驾驶模拟实验场景中道路和驾驶员视野情况.在进行实验过程中,车辆运行数据将被持续记录.

a 研究的山路

b 驾驶员驾驶环境
2 分析方法
2.1 指标选取
断面车速差对评价相邻组合路段线形安全具有重要意义[1].《公路项目安全性评价指南》[8]把相邻单元运行车速的差值作为评价指标,用以分析道路路线设计的安全性.Hirsh[12]认为简单将前后连续断面在固定位置的运行车速差值作为断面车速差会过低估计单个驾驶员所经历的车速下降值.因此,McFadden等[13]提出了一种新的断面车速差参数的计算方法.他们将断面车速差定义为最大车速变化值的第85分位值(vmsr85),即首先计算单个驾驶员在直线路段最后200 m的最大车速 (vmax200)和曲线路段上最小车速(vminc)的差值,再取所有样本驾驶员差值的第85分位值作为该连续路段的断面车速差.计算公式如下:
(1)
传统的运行车速采集方法选取路段上固定断面点进行观测,而本研究在驾驶模拟器中完成,记录的行车速度为实验车辆沿着道路线形的连续的直线速度,采集频率为20 Hz.在计算运行车速的过程中,首先提取路段上每间隔5 m的平均车速值,并在此基础上计算每名驾驶员在相邻组合路段上的最大车速差,以所有驾驶员最大车速差的第85分位作为相邻组合路段的断面车速差.
2.2 指标评价
2.2.1 指标评价依据
根据Cafiso等[14-15]的研究,当安全替代指标服从正态分布时,第50和第85分位值对于变量的分布范围具有较为典型的代表性,可以作为划分路段安全水平的阈值.
基于上述原理,图4给出了断面车速差(vmsr85)的累计百分率曲线.结果表明,断面车速差能非常好地拟合正态分布,因此选取第50和第85分位值作为阈值来区分不同路段的车速一致性与安全性是合理的.
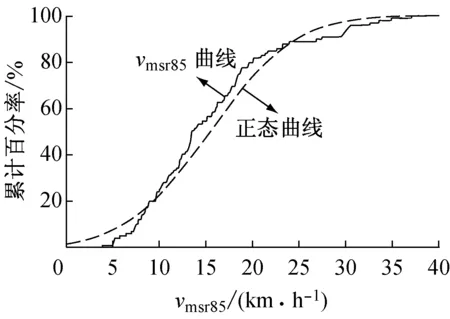
图4 vmsr85的累计百分率曲线
2.2.2 指标评价结果
通过对速度一致性评价指标进行统计分析,发现断面车速差(vmsr85),在1%的显著程度上拟合正态分布(Shapiro -Wilk检验系数为0.929).能够利用正态分布的分位值来鉴定相邻组合路段车速一致性的优劣.通过借鉴Cafiso等[14-15]提出的方法,将单项指标分布的第50和第85分位值作为“GOOD”,“FAIR”和“POOR”的阈值.在速度一致性评价中,路段vmsr85≤15.38 km·h-1被判定为“GOOD”;15.38 km·h-1 3.1 参数相关性分析 表2为各项道路设计参数间的皮尔森相关性系数.从表2中可以发现曲率半径、曲率变化率、偏转角和超高4项参数均从不同角度反映了路段的曲线特征,具有高度相关性,因此在建模过程中应尽可能避免这几项参数的同时存在. 表2 道路设计参数相关性分析 注:黑体数字对应95%程度上显著相关的变量;括号中的数字表示显著度. 3.2 断面车速差模型 3.2.1 直线+平曲线组合路段 针对直线+平曲线组合路段,通过单因素分析发现直线段的路段长度与运行车速显著影响组合路段的断面车速差.直线段长度Lt和运行车速v85对vmsr85变化的解释度分别为33%和31%. 模型的拟合优度值为193.665,模型的最终解释度(R2)为51%,即模型能够解释断面车速差的51%.表3为模型的参数估计结果.根据模型结果,对于直线+平曲线组合路段,直线段长度每增加1 km,断面车速差增加6.85 km·h-1;运行车速值每增加1 km·h-1,断面车速差增加0.59 km·h-1. 表3 vmsr85模型的参数估计结果(直线+平曲线) 3.2.2 平曲线+平曲线组合路段 针对平曲线+平曲线组合路段,通过单因素分析发现前后两曲线半径之比(r1/r2)与前一曲线路段长度L显著影响组合路段的断面车速差.断面车速差随前后两曲线半径之比和前一曲线长度的增大而增大.前后两曲线半径之比和前一曲线长度对于断面车速差的解释度分别为16%和22%. 模型的拟合优度值为252.536,模型的最终解释度(R2)为38%.表4为模型的参数估计结果.根据模型结果,对于平曲线+平曲线组合路段,前一曲线路段长度每增加1 km,断面车速差增大27.5 km·h-1;前后两曲线半径之比每增加1个单位,断面车速差提高约8.40 km·h-1. 表4 vmsr85模型的参数估计结果(平曲线+平曲线) 3.3 车速一致性安全阈值 以所有路段的vmsr85值的第50和第85分位值(15.38和22.99 km·h-1)作为划分“GOOD”,“FAIR”和“POOR”的阈值界限,分析了在不同道路设计参数值下的vmsr85值的变化情况. 3.3.1 直线+平曲线组合路段 针对直线+平曲线组合路段,vmsr85的计算模型如下: vmsr85=-51.15+6.85Lt+0.59v85 (2) 分别以直线段长度(Lt)和运行车速(v85)为控制变量,绘制在不同取值范围下的vmsr85值分布区间,如图5所示.为了保证路段的车速一致性在“GOOD”区间内,运行车速必须控制在112.00 km·h-1以下,直线段长度越长,对运行车速的要求越严格.例如,当直线段长度取2.00 km,运行车速必须在88.00 km·h-1以下才能保证车速一致性达到“GOOD”.若运行车速超过120.00 km·h-1,直线段长度必须小于500 m,才能保证车速一致性达到“FAIR”. 图5 vmsr85预测值分布及安全评价区间(直线+平曲线) Fig.5 Predictive value distribution ofvmsr85and domain analysis of safety thresholds (tangent + horizontal curve section) 3.3.2 平曲线+平曲线组合路段 类似地,对于平曲线+平曲线组合路段,vmsr85的计算模型如下: (3) vmsr85主要受前一曲线长度(L)和前后两曲线半径之比(r1/r2)的影响.图6为控制这两个因素时,vmsr85预测值的分布区间.当曲线半径之比为0.5,即前一曲线半径是后一曲线半径的一半的情况下,前一曲线长度必须满足480 m以下才能保证车速一致性达到“GOOD”,而必须满足750 m以下才能保证达到“FAIR”.相反,若车辆从曲线半径较大的曲线到达半径较小的曲线,如取半径之比为2时,则几乎不可能保证车速一致性达到“GOOD”,且必须使前一曲线长度小于300 m,才能使得车速一致性达到“FAIR”.因此,在道路设计过程中,应尽可能避免大弯接小弯的情况发生. 图6 vmsr85预测值分布及安全评价区间(平曲线+平曲线) Fig.6 Predictive value distribution ofvmsr85and domain analysis of safety thresholds (horizontal curve + horizontal curve section) 本文在高仿真驾驶模拟器中,基于湖南省永吉高速公路道路设计参数及周边地形环境参数,构建山区高速公路的三维虚拟模型,以山区高速公路中的相邻组合路段为研究对象,从实验设计、数据处理、指标选取、模型建立方面介绍了以驾驶模拟数据为基础的道路安全评价方法.评估对象是山区高速公路,因此其指标选取具有一定的特殊性,但是使用的安全评价方法具有普遍性,对于其他类型线形的安全评价具有借鉴意义. 本文建立了以断面车速差为评价指标的相邻组合路段线形安全分析模型.模型结果表明,在直线+平曲线组合路段中,直线长度和运行车速的增加均会导致断面车速差的增大,在平曲线+平曲线组合路段中,前一曲线路段长度及前后两曲线半径之比的增大,也会导致断面车速差的增大.同时,依据断面车速差的第50和第85分位值划分了组合路段线形安全阈值界限,为设计人员判断相邻组合路段的设计安全性提供了依据. 本文基于驾驶模拟技术,提出了相邻组合路段安全评估的科学可行的方案,不仅在理论层面为组合路段线形设计安全性评估提供了参考,也为实际的工程应用提供了参考依据,使工程设计人员能够通过本文模型对设计阶段的相邻组合道路线形进行安全检验,综合考虑设计安全性和工程需求,选择最为合适的道路设计参数. [1] Lamm R, Choueiri E M, Hayward J C,etal. Possible design procedure to promote design consistency in highway geometric design on two-lane rural roads[J]. Transportation Research Record: Journal of the Transportation Research Board, 1988(1195):111. [2] Al-Masaeid H R, Hamed M,Ghannam A G. Consistency of horizontal alignment for different vehicle classes[J]. Transportation Research Record: Journal of the Transportation Research Board, 1994(1500): 178. [3] Bella F. The evaluation of design consistency: predicting models of operating speed on three-dimensional alignment from tests on driving simulator[C]//3rd International Symposium on Highway Geometric Design. Chicago: Transportation Research Board, 2005:18-18. [4] Bella F. Parameters for evaluation of speed differential: contribution using driving simulator[J]. Transportation Research Record: Journal of the Transportation Research Board, 2007,2023(1):37. [5] Bella F. New model to estimate speed differential in tangent-curve transition[J]. Advances in Transportation Studies, 2008(15):27. [6] 中华人民共和国交通运输部. JTG B01—2004 公路工程技术标准[S]. 北京:人民交通出版社,2004. Ministry of Transport of the People’s Republic of China. JTG B01—2004 Technical standard of highway engineering[S]. Beijing: China Communications Press, 2004. [7] 中华人民共和国交通运输部. JTG D20—2006公路路线设计规范[S].北京:人民交通出版社, 2006. Ministry of Transport of the People’s Republic of China. JTG D20—2006 Design specification for highway route[S]. Beijing: China Communications Press, 2006. [8] 中华人民共和国交通运输部. JTG/T B05—2004公路项目安全性评价指南[S].北京:人民交通出版社, 2004. Ministry of Transport of the People's Republic of China. JTG/T B05—2004 Guidelines for safety audit of highway[S]. Beijing: China Communications Press, 2004. [9] Keith K, Trentacoste M, Depue L,etal. Roadway human factors and behavioral safety in Europe[R]. Washington D C: Federal Highway Administration, 2005. [10] Wang X, Wang T, Tarko A,etal. The influence of combined alignments on lateral acceleration on mountainous freeways: a driving simulator study[J]. Accident Analysis & Prevention, 2015,76:110. [11] Bella F. Can driving simulators contribute to solving critical issues in geometric design?[J]. Transportation Research Record: Journal of the Transportation Research Board, 2009,2138(1):120. [12] Hirsh M. Probabilistic approach to consistency of highway alignment[J]. Journal of Transportation Engineering, 1987,113(3):268. [13] McFadden J, Elefteriadou L. Evaluating horizontal alignment design consistency of two-lane rural highways: development of new procedure[J]. Transportation Research Record: Journal of the Transportation Research Board, 2000,1737(1):9. [14] Cafiso S, Di Graziano A, La Cava G. Actual driving data analysis for design consistency evaluation[J]. Transportation Research Record: Journal of the Transportation Research Board, 2005,1912(1):19. [15] Cafiso S, Cava G L. Driving performance, alignment consistency, and road safety[J]. Transportation Research Record: Journal of the Transportation Research Board, 2009,2102(1):1. Safety Evaluation of Adjacent Combined Alignments of Mountain Freeway WANG Xuesong1, LIU Jiao1, WU Xingwei2 (1.Key Laboratory of Road and Traffic Engineering of the Ministry of Education, Tongji University, Shanghai 201804, China; 2. Civil and Environmental Engineering Department, University of Washington, Seattle 98195, USA) In this paper, the driving simulator was used to realize the roadway scenario for Yongji freeway in Hunan Province, China. The driving scene was reproduced in virtual reality by the exact road design parameters and roadside elements from the design blueprint. The research objects are tangent + horizontal curve combined alignment and continuous horizontal curves combined alignment. The safety evaluation method was introduced based on the driving simulation data in terms of experimental design, data processing, indicator selection and model building. The results indicate that speed differential is positive correlated to the length of tangent segment and operating speed in the model of tangent + horizontal curve combined alignment, and it is also positive correlated to the length of the first horizontal curve and the ratio of curvature radius in the model of continuous horizontal curves combined alignment. The 50th/85th percentile values of the speed differentials are found as the safety thresholds of “GOOD”, “FAIR” and “POOR” according to their distribution. safety evaluation; driving simulator; mountain freeway; adjacent combined alignments; speed differential 2015-11-04 国家自然科学基金(51522810) 王雪松(1977—),男,教授,博士生导师,工学博士,主要研究方向为交通安全,交通统计分析,交通规划,驾驶模拟器应用. E-mail:wangxs@tongji.edu.cn U491 A3 线形安全分析模型



4 结论
