基于快速终端滑模的永磁同步电动机位置跟踪控制研究
2016-12-06潘云忠刘琳霞
潘云忠,刘琳霞
(苏州健雄职业技术学院,太仓 215411)
基于快速终端滑模的永磁同步电动机位置跟踪控制研究
潘云忠,刘琳霞
(苏州健雄职业技术学院,太仓 215411)
针对永磁同步电动机伺服系统在位置控制中受到外部扰动、电机参数时变、机械传动间隙影响等问题,提出了一种基于径向基神经网络快速终端滑模的电机位置跟控制方法。在分析永磁同步电动机数学模型的基础上,基于快速终端滑模控制理论,设计了一种快速终端滑模的永磁同步电动机速度跟踪控制算法;并对电机参数的时变性,提出了一种新型的RBF神经网络快速终端滑模控制的位置控制算法;利用李雅普诺夫函数证明了系统的稳定性。仿真实验结果表明:与传统的PI控制、单独的快速终端滑模控制相比,该算法能够有效提高永磁同步电动机的响应速度、鲁棒性以及电机位置跟踪精度,从而提高了永磁同步电动机的控制性能。
永磁同步电动机;位置控制;滑模控制;径向基神经网络
0 引 言
永磁同步电动机(以下简称PMSM)具有效率高、性能好、体积小等优点,在高精度的位置伺服控制系统中得到了广泛的应用[1]。高精度的伺服系统不仅应该具有快速响应的能力,而且在电机参数不断变化以及受到外部扰动时,电机也应该具备快速跟踪的能力。由于PMSM具有强耦合性、参数时变性以及非线性等特点,普通的PI控制很难实现电机控制系统高性能的位置跟踪。针对以上问题,国内外学者提出了反馈线性化控制[2]、自适应控制[3]、模糊控制[4]以及滑模变结构控制[5]等。其中滑模控制因其具有快速动态响应以及对参数时变性和外部扰动不敏感的特点,得到广泛应用。
本文利用快速终端滑模与传统滑模相比,其拥有较快的收敛性,因此将其应用到PMSM位置跟踪控制中,以实现电机存在参数时变、外部扰动等情况下的位置有效控制。并针对快速滑模控制算法中对电机参数依赖性强,而电机参数又因温度等原因在不断变化,对设计高性能的电机位置跟踪控制系统产生较大困难,为此本文利用RBF神经网络[6]可以对PID多个参数进行整定以及不依赖精确数学模型的特点,设计了一种RBF神经网络与快速滑模相结合的控制器,该控制器不仅对网络逼近误差进行了有效补偿,而且解决了快速终端滑模过依赖电机参数等问题,从而有效提高了永磁同步电动机控制系统性能。
1 PMSM数学模型
建立如图1所示的PMSMd-q数学模型,在同步旋转坐标(d-q)下,PMSM模型可以表示:
(1)
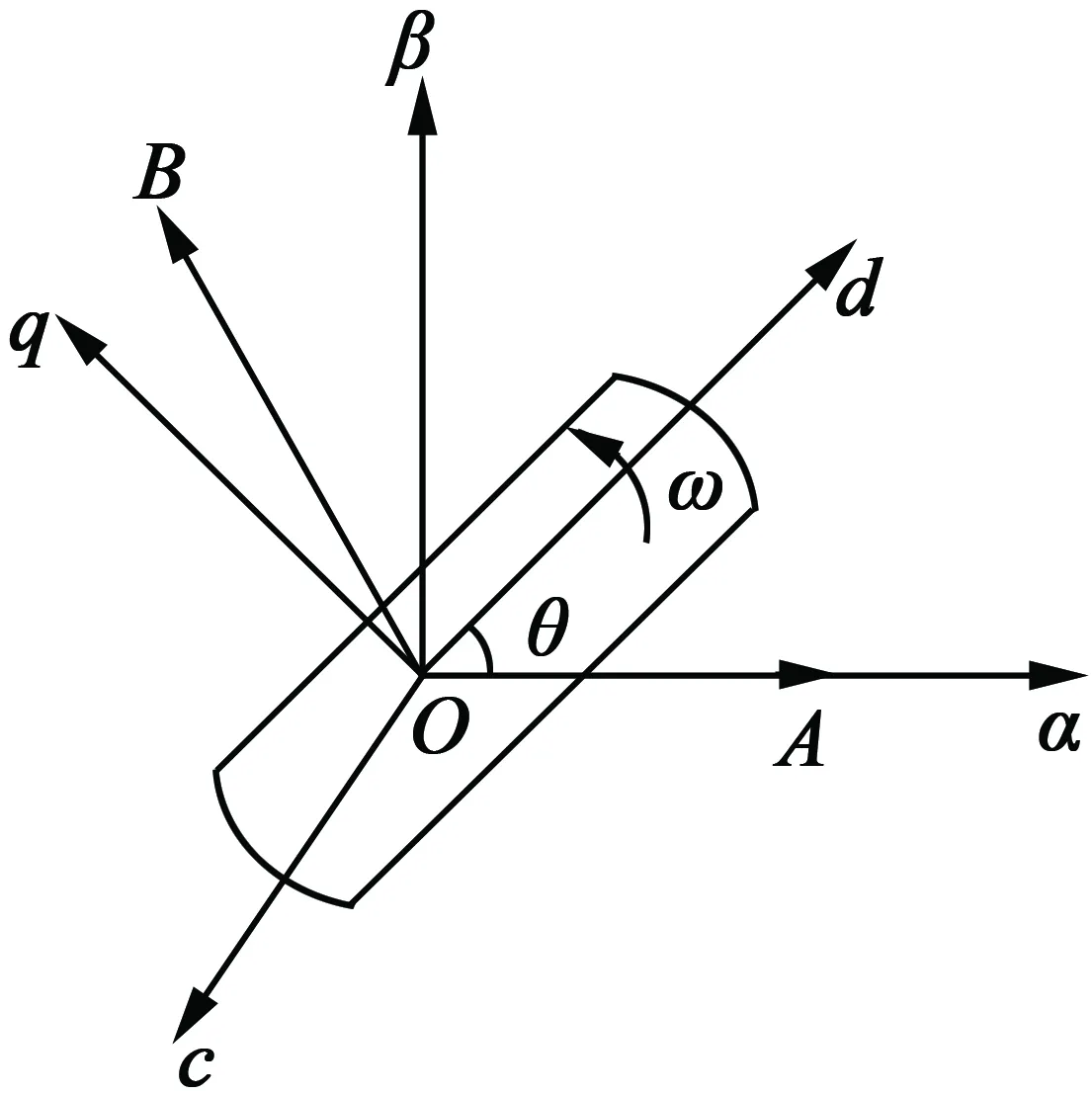
图1 PMSM d-q坐标系
式中:id,iq和ud,uq分别为电机d和q轴电流和电压;Rs为定子电阻;L为定子电感;ψf为电机的永磁通;J为转动惯量;B为粘性摩擦系数;ω为角速度;θ为转子位置。
2 快速终端滑模PMSM位置跟踪控制器设计
假设速度控制环、电流环和逆变器均为理想情况下,PMSM数学模型可以简化为二阶微分方程:
(2)
设电机的期望位置为θ′,电机实际位置为θ,则电机的位置状态误差可以表示:
(3)
为了PMSM能够提高位置跟踪精度和良好的动态特性,控制器的滑模面被设计为快速终端滑模,其表达形式:
(4)
其中,α,β均为大于零的常数;p,q为大于零的奇数,且p>q。
针对PMSM简化数学模型以及快速终端滑模面式(4),设计快速终端滑模控制律:
(5)
(6)
(7)
式中:p0>q0,且p0,q0均为奇数;φ,γ均为大于零的常数。
Lyapunov函数定义:
(8)
由式(4)可以得到:
(9)
将式(2)代入式(9)中得:
(10)
由式(5)~式(7)、式(10)可以得:
(11)
由此可得:
(12)
(13)
由于设计参数满足:
(14)
因此可以得到不等式:
(15)
由此可知,系统能够在较短时间内达到快速终端滑模面,即S=0,并稳定在滑模面上。当S=0且能够稳定在滑模面上时,系统误差e便能够在有限时间内收敛到零,快速滑模控制结构如图2所示。

图2 快速终端滑模位置控制结构
上述算法是在ψf,J,B已知情况下设计的,但是在实际的伺服系统中这些参数是很难获得的,该算法在某种程度上存在一定局限性,为此需要进行改进,算法改进如下。
3 RBF神经网络快速终端滑模位置控制器设计
3.1RBF神经网络
径向基神元[7]传递函数表达式:
(16)
式中:j=1,2,…,N是隐含层单元数量;xi为输入量;cj是与xi同维向量。
径向基神经网络结构如图3所示,神经网络输出值:
(17)
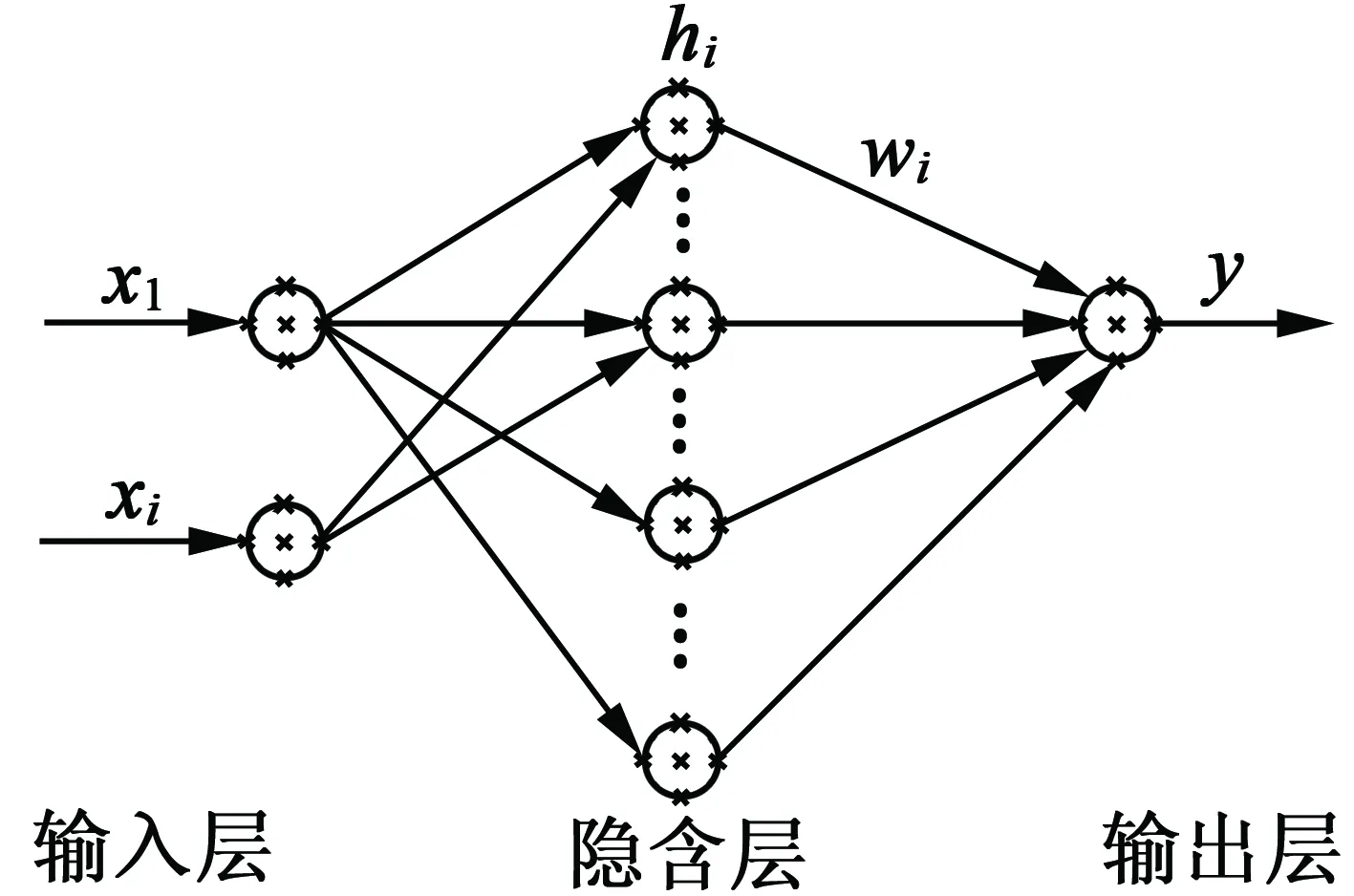
图3 RBF神经网络结构
径向基神经网络具有较强的学习速度,不存在局部最小值,对非线性连续函数具有一致逼近性。鉴于上述快速滑模控制局限性,本文提出了径向基神经网络与快速终端滑模相结合的控制结构[8-10]。
3.2RBF神经网络快速终点滑模位置跟踪控制器设计
系统滑模面采用式(4)的形式,滑模控制律设计:
(18)
(19)
(20)

(21)
Lyapunov函数定义[11]为:
(22)

(23)
有式(4)可以得到:
(24)
有式(2)、式(3)、式(24)可得:
(25)
将式(18)代入上(25)中可得:
(26)
有等效控制器的定义,可以得到:
(27)
由式(26)、式(27)可以得到:
(28)
由以上几式可以得出:
(29)
(30)
(31)
由上式可得不等式:
(32)
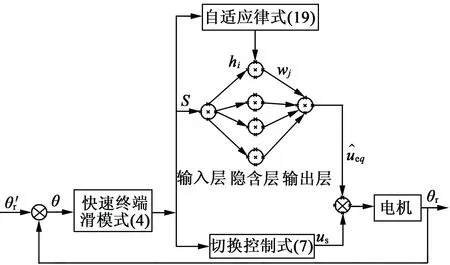
图4 BRF神经网络快速终端滑模控制结构
4 仿真实验
为验证上述算法的可行性,仿真实验主要针对PMSM位置跟踪控制算法PID控制、快速滑模控制、RBF快速终端滑模控制,三者控制器性能对比。控制器的主要参数如表1所示。
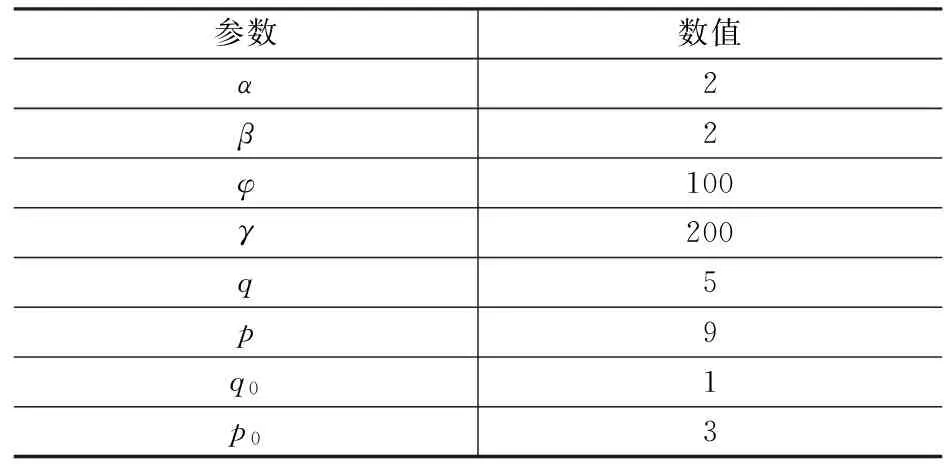
表1 控制器主要参数
(1)当存在外部干扰情况下仿真实验。
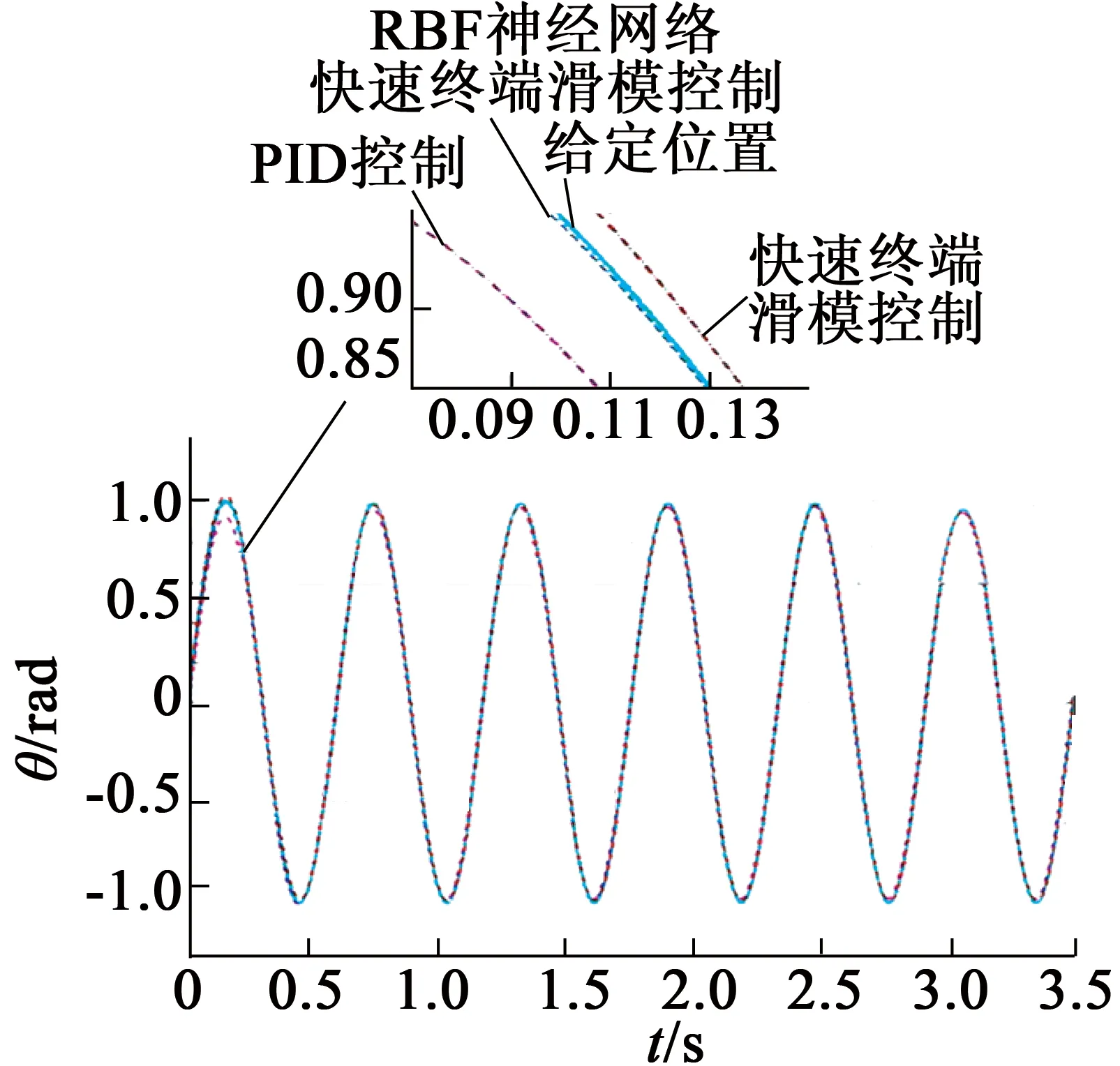
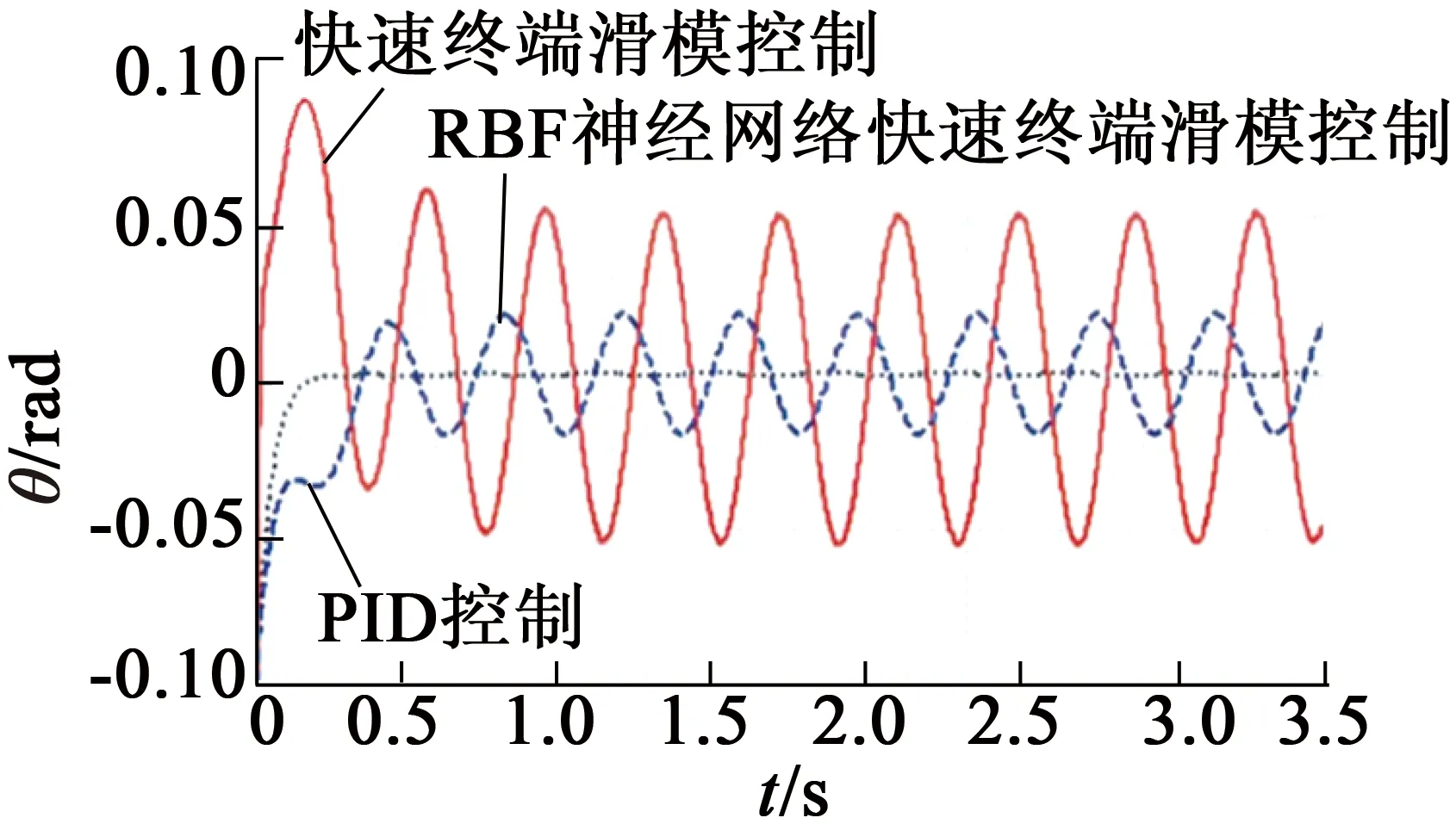
当存在正弦外部干扰时,设定跟踪曲线为x=sin(6πt)。图5为电机在三种控制方式下的位置跟踪曲线。实验证明,RBF神经网络终端滑模控制器在存在外部干扰情况下,位置跟踪效果要比PID和单纯的快速滑模控制器更好,误差收敛时间更短。
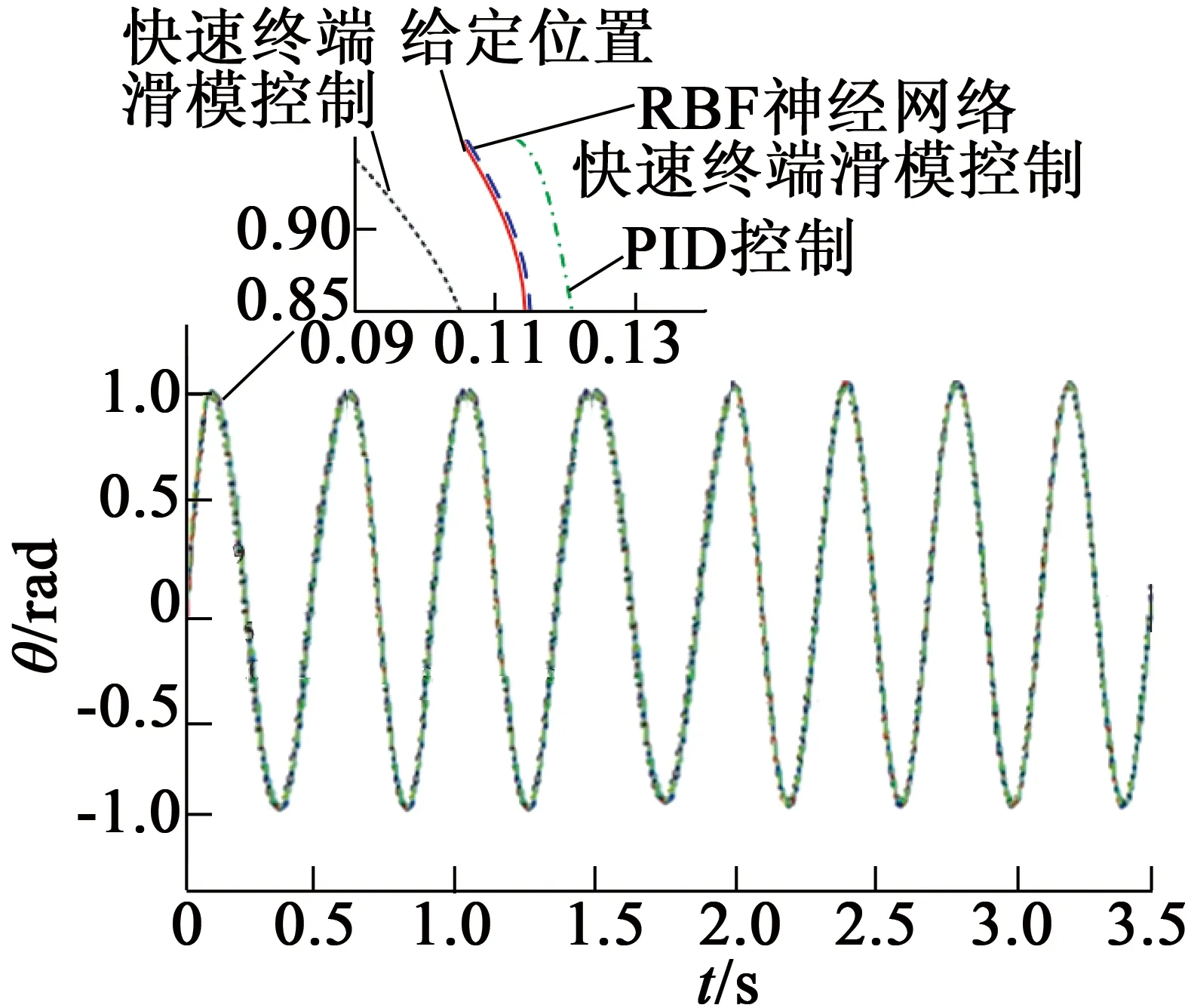
(a) 电机位置跟踪
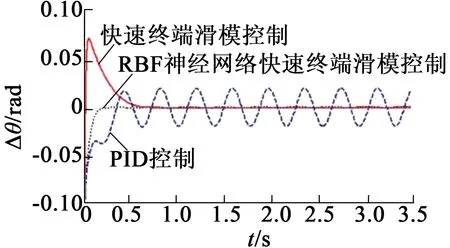
(b) 电机位置跟踪误差
(2)当存在参数摄动[12]时,电机位置跟踪仿真实验。
当J有一定摄动时,并且与实验(1)中存在相同的干扰,仿真实验结果如图6所示。通过图6可以看出,当存在参数摄动时,RBF神经网络快速终端滑模控制性能比单纯的快速终端滑模控制和PID控制更好,收敛速度快,实验证明本控制器具有良好的鲁棒性。
(a) 电机位置跟踪
(b) 电机位置跟踪误差
5 结 语
本文针对PMSM伺服系统在位置控制中受到外部扰动、电机参数时变、机械传动间隙影响等问题,提出了一种快速终端滑模控制器对电机位置跟踪进行控制。并针对本控制器过于依赖电机参数,而电机参数又具有时变性,提出了一种径向基神经网络与快速终端滑模控制器相结合的控制器。仿真实验结果表明,当存在外部干扰和参数摄动情况下,RBF神经网络快速终端滑模控制器要比PID和快速滑模控制器位置性能更好,有效提高PMSM控制系统的相应速度、鲁棒性以及位置跟踪精度。
[1] 曹先庆,朱建光,唐任远.基于模糊神经网络的永磁同步电动机矢量控制系统[J].中国电机工程学报,2006,26(1):137-141.
[2] 张涛,蒋静坪,张国宏.交流永磁同步电动机伺服系统的线性化控制[J].中国电机工程学报,2001,21(6):40-43.
[3] 胡建辉,邹继斌.具有不确定参数永磁同步电动机的自适应反步控制[J].控制与决策,2006, 21(11):1264-1269.
[4] ZADEH L A.Fuzzy sets[J].Information and Control,1965,8(3):338-35.
[5] KARUNADASA J P,RENFREW A C.Design and implementation of microprocessor based sliding mode controller for brushless servo motor[J].IEE Proceedings-B,1991,138(6):345-363.
[6] 张昌凡,王耀南.永磁同步电动机的变结构智能控制[J].中国电机工程学报,2002,22(7):13-17.[7] 纪志成,李三东,沈艳霞.自适应积分反步法永磁同步电动机伺服控制器的设计[J].控制与决策, 2005, 20(3):329-331,336.
[8] 张国柱,陈杰,李志平.直线电机伺服系统的自适应模糊摩擦补偿[J].电机与控制学报,2009,13(1):154-160.
[9] 王军,肖建.永磁同步电动机自适应神经网络IP位置控制器[J].电机与控制学报,2005,9(6): 525-528.
[10] 陈荣,邓智泉,严仰光.永磁同步伺服系统电流环的设计[J].南京航空航天大学学报,2004,36(2):220-225.
[11] 杨南方,骆光照,刘卫国.误差补偿的永磁同步电动机电流环解耦控制[J].电机与控制学报,2011,15(10):50-54.
[12]ZHOUJ,WANGY.Adaptivebacksteppingspeedcontrollerdesignforapermanentmagnetsynchronousmotor[J].IEEProc.onElectricPowerApplications,2002,149(2):165-172.
Research on Position Tracking Control Method of PMSM Based on RBF Neural Network Fast Terminal Sliding
PANYun-zhong,LIULin-xia
(Suzhou Chien-Shiung Institute of Technology,Taicang 215411,China)
Aiming at the problem of servo system of permanent magnet synchronous motor, such as subject to external disturbances in position control, the motor parameters variation and effect of mechanic transmission clearance, a motor position control method based on RBF neural network fast terminal sliding mode was presented. On the basis of the analysis of permanent magnet synchronous motor mathematical model, based on the fast terminal sliding mode control theory, a fast terminal sliding mode control of permanent magnet synchronous motor speed tracking algorithm was designed; and for time-varying of the parameters of the motor, a new RBF neural network fast terminal sliding mode control of position control algorithm was proposed. Lyapunov function was used to prove the stability of the system. The simulation results show that compared with traditional PI control and separate the fast terminal sliding mode control, the proposed algorithm can effectively improve the permanent magnet synchronous motor response, robustness and the motor position tracking precision, which can improve the control performance of permanent magnet synchronous motor.
PMSM; position control; sliding mode control; Radial basis function neural network
2015-05-13
TM341;TM351
A
1004-7018(2016)01-0039-04
潘云忠(1979-),男,硕士,讲师,研究方向为机电控制。