磁通切换双定子电机定位力矩抑制方法研究
2016-12-06龚剑峰朱孝勇宗在云
龚剑峰,全 力,朱孝勇,宗在云
(江苏大学,镇江 212013)
磁通切换双定子电机定位力矩抑制方法研究
龚剑峰,全 力,朱孝勇,宗在云
(江苏大学,镇江 212013)
磁通切换永磁(FSPM)电机具有功率密度高、输出转矩大、反电动势正弦等优点,与传统永磁体位于转子的永磁同步电机、无刷直流电机相比,FSPM电机存在较大的转矩脉动,这也一定程度上限制了该类电机在诸如高精度运动控制、伺服系统等领域的应用和推广。针对磁通切换双定子电机,提出了一种“内、外电机错位设计与控制”的方法,并进行理论分析和实验验证。在电机本体设计上,采用磁路并联式同心圆结构,同时将内、外定子之间错开一个角度;控制时,通过控制内、外定子电流相位,以达到明显抑制定位力矩的目的。仿真分析和实验研究均表明,该方法能使电机在保持高转矩密度的同时,能有效降低了该类电机的总转矩脉动,为该类双凸极类双定子电机的转矩脉动的抑制,提供了一种行之有效的方法。
定位力矩抑制;双定子;磁通切换;磁路并联式;同心圆结构
0 引 言
随着稀土永磁材料性价比的不断提高,永磁电机以其体积小、效率高的优点在越来越多的工业驱动领域得到应用[1]。但是,传统的永磁无刷电机通常将永磁体安装在转子上,为了防止高速运行时永磁体受到离心力的作用而甩落,故在转子上有必要采用不锈钢套筒或环氧无纬玻璃丝带进行固定,一方面增加了制造工艺和成本,同时该类加固装置也进一步引起电机转子中永磁体的散热困难。由于钕铁硼永磁体性能受温度影响较为明显,在永磁体发热严重时,甚至可以发生不可逆退磁。这就是转子永磁型电机的应用范围受到限制的原因。近年来,一类永磁体位于定子的永磁无刷电机引起了国内外众多学者的关注,目前开展研究较多的定子永磁型电机主要有双凸极永磁(以下简称DSPM)电机[2-3],磁通反向永磁(以下简称FRPM)电机[4-5]和磁通切换永磁(以下简称FSPM)电机[6-13]等三种基本电机类型。
最新研究表明,相比于DSPM电机和FRPM电机,FSPM电机不仅拥有功率密度高、带载能力强的优点,还具备无需斜槽即可得正弦反电动势的特点。因此,它被认为是最有可能代替永磁同步电机的一种结构[14]。
但FSPM电机定、转子仍采用了双凸极类电机结构,且该类电机中,通常利用永磁体的“聚磁效应”,将永磁体夹在定子齿中间,形成“三明治”式结构,从而实现了较高的气隙磁密,但客观上造成了该类电机的定位力矩较大,这也是引起该类定子永磁型磁通切换电机转矩脉动较大的重要原因之一。与传统永磁体位于转子的永磁同步电机、无刷直流电机相比,FSPM电机存在较大的转矩脉动,这也一定程度上限制了该类电机在诸如高精度运动控制、伺服系统等领域的应用和推广。如何实现该类电机高功率密度的同时有效降低电机的转矩脉动,成为该类电机的研究热点之一。
为了抑制电机运行时的转矩脉动,许多学者针对如何削弱定位力矩,进行了深入的研究,并取得了诸多成果[15-20]。总的来说,电机定位力矩削弱的方法可以归纳为两大类:一类是从电机本体设计出发,如定/转子斜槽设计、将永磁体不对称放置等[14],但是由于优化电机本体的方法受到电机结构的限制,导致抑制定位力矩的能力很有限[14];第二类方法则是通过算法来削弱电机定位力矩,该方法无需更改硬件设备,只需修改控制算法,如通过注入电流谐波补偿永磁电机定位力矩的控制方法,但是此类方法会增加电流谐波含量,加重对电网的污染,所以并网环节需要对电流做滤波处理,增加了控制成本。
本文结合上述两类抑制定位力矩的方法在传统单转子磁通切换电机结构基础上,针对新能源汽车驱动电机应用场合,提出了一种高转矩密度磁通切换双定子电机。该电机具有内、外两个定子和一个中间转子,内、外定子上均绕有三相电枢绕组,内、外定子和中间转子分别形成内电机和外电机。由于该双定子电机存在两套电枢绕组,控制较为灵活,内、外电机可同时工作或单独工作,以满足新能源汽车加速、爬坡、高速巡航、减速制动等不同运行工况的要求。本文在分析内、外电机定位力矩频谱的基础上,提出了一种“内、外电机错位控制”的方法,并进行理论分析和实验验证。研究表明,该方法能有效降低内外电机的总定位力矩,从而使电机在保持高转矩密度的同时,明显降低了电机的总转矩脉动,在新能源汽车驱动电机领域具有一定的应用前景。
1 双定子电机基本结构
双定子电机按机械结构可分为同心结构和并行结构;按磁路结构分为磁路串联和磁路并联。同心圆结构的双定子电机有功率密度高、转矩密度高的特点,电机的内部体积得到充分的利用。并联式磁路结构的双定子电机相比较串联式磁路结构,能允许内、外定子不同步运行,具有容错性能好、控制更加灵活等优点,即允许双定子电机内外定子相互独立工作。
本文提出了一种磁路并联式同心圆结构的磁通切换双定子电机。该电机结构如图1所示,该电机内、外定子公用一个转子,因为电机转子没有绕组和永磁体,所以该转子具有结构简单、易散热等特点。为了降低磁通切换电机的转矩脉动,设计电机时,双定子电机定转子齿配比设计为12/22/12,即定子极对数ps=12,转子极对数pr=22。
2 电机转矩分析与定位力矩抑制
2.1 转矩脉动分析
根据双定子磁通切换电机的运行原理,该磁通切换双定子电机的输出转矩由三部分组成,如下:
(1)
式中:Tpm为电机的永磁转矩;Tr为磁阻转矩;Tcog为定位力矩。
双定子磁通切换电机中,由于反电势一般仍呈现正弦分布,因此可采用与传统永磁同步电机相类似的控制方法。研究表明,对磁通切换电机采用id=0控制方法,可使磁阻转矩Tr值很小,理论上Tr=0。此外,磁通切换电机反电动势为正弦波,所以当采用正弦电流控制时,理论上,电机正常运行时Tpm为常数。综合上述分析,可见,内、外电机的定位力矩Tcog内和Tcog外成为引起电机转矩脉动的主导因素。
2.2 定位力矩分析
定位力矩作为永磁电机的固有现象,定位力矩由磁滞定位力矩和齿槽定位力矩两部分组成[21]。磁滞定位力矩是在定子磁场作用下, 转子铁磁物质内部磁畴反对改变其排列方向而形成[21]。齿槽定位力矩是由永磁电机定、转子齿槽相互作用,引起电机磁场以及磁阻变化而产生的一种周期性脉动力矩。由于铁磁物质的磁滞回线特性是基本相同的,所以在旋转磁场里面转子受到的磁滞定位力矩是一个阻碍转子转动的恒定的阻力,所以分析它意义不大,因此,我们平时分析定位力矩都是分析齿槽定位力矩。
在双定子磁通切换电机中,由于电机的定、转子均呈现凸极结构,电机定、转子齿槽因素造成的齿槽定位力矩,这也是双凸极类永磁电机定位力矩较大的根本原因之一。该类电机中,理论上,当转子齿的中心线与定子齿的中心线对齐时,电机的定位力矩最小。考虑到内、外电机定子齿上永磁体用量是相同的,所以电机每个定位力矩脉动周期的幅值基本相等。
对一台永磁电机,定位力矩的周期Ccog可由下式得出[22]:
(2)
式中:Ncog为ps和pr的最小公倍数。
在磁通切换双定子电机中,由于转子极对数为22,故电机的电周期对应的机械角度为360°/22,对应的弧度为π/11,参照式(2),电机ps和pr的最小公倍数为132,可见该磁通切换电机的定位力矩周期是电周期的1/6倍,而电机的定位力矩的变化频率为空载反电势的6倍。为了较为精确地得到电机的定位力矩波形,仿真分析中设定电机单位转速为1 r/min,通过有限元方法可获得电机的定位力矩波形和空载反电势波形。
图2为磁通切换双定子电机的内、外电机的定位力矩和反电动势图。从图中可以看出,定位力矩与反电势相似,均呈现出周期波动,且定位力矩的电周期是反电势的1/6倍。将图2的内、外电机的定位力矩进行频谱分析,得到如图3所示的定位力矩频谱图。

(a)内电机定位力矩、反电动势波形图(b)外电机定位力矩、反电动势波形图
图2 内外电机定位力矩图
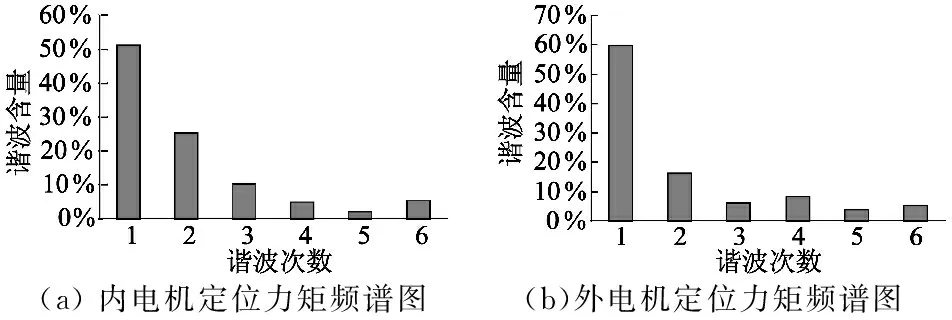
(a)内电机定位力矩频谱图(b)外电机定位力矩频谱图
图3 内外电机定位力矩频谱图
由图3可以看出,内外电机的定位力矩周期以及有效谐波次数(因高次谐波幅值太小,忽略了高次谐波)相同。根据图中对定位力矩各次谐波的分析,该双定子电机的内外电机的定位力矩Tcog可表示:
(3)
式中:t为时间;Ac1为Tcog的基波分量幅值;θ为电机机械角度;φcog1为Tcog的基波分量相位角;Ac2为Tcog的2次谐波分量幅值;φcog2为Tcog的2次谐波分量相位角;Ac3为Tcog的3次谐波分量幅值;φcog3为Tcog的3次谐波分量相位角;φcogn为Tcog的n次谐波分量相位角。
本文讨论的三相12/22/12极磁通切换电机具有极对数多、分数槽特点,理论上定位力矩波形中基波分量是主导作用的。上述分析显示,Ac1在电机定位力矩占得比重较大,与理论分析一致。
传统的双定子电机通常采用内外电机磁路串联型结构,为了使电机的磁阻最小,内外定子的相互位置需要严格一一对应,但这也造成了该类双定子电机中内外定子对转子产生的总定位力矩是叠加的,从而导致了该类电机的总定位力矩较大,且无法通过适当调节内外电机定子之间的相对位置来实现电机总定位力矩的削弱和抑制。
本文研究的双定子电机,由于采用了内外电机磁路并列的结构,内外电机的磁路相互独立,内外定子齿位置也无需严格保持一致,这为通过调节内外电机定子齿的相对位置,有效削弱或抑制电机的定位力矩,提供了可能。此外,由于磁路并联结构双定子电机的内外定子对转子的作用是相互独立的,内外定子位置的改变和交错,不会影响内外电机各自的电磁性能。
为了验证上述理论,本电机在设计时,将内定子设计成可沿圆周方向滑动的“浮动式”内定子,在内定子沿圆周移动任意角度后,可采用固定螺栓进行固定。这样,内外定子齿之间的相互位置便可进行调节,这为分析电机的定位力矩与内外定子齿之间的相互位置提供便利。令电机内外定子之间有一个Δθ的角度差,如图4所示,当电机运行时,转子任意一个齿从与外定子齿相重合的位置转到与相应的内定子齿相重合的位置,需要转过Δθ。
通过式(3)的分析,得出:
(4)
式中:Δθ为内、外定子错位机械角度。
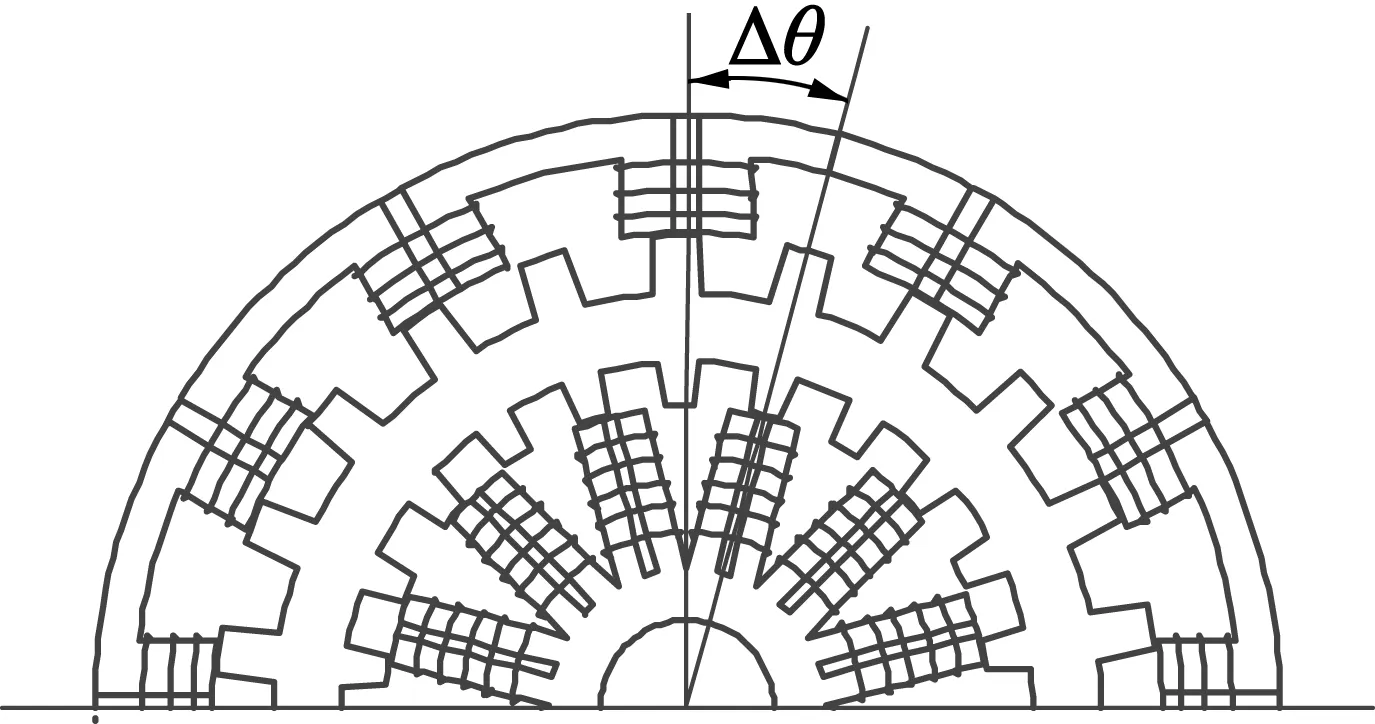
图4 内外定子错位局部图
内外电机的定位力矩由基波分量以及各次谐波分量构成,由式(4)总转矩表达式可以看出,为了有效降低电机的总转矩,内定子对转子的定位力矩与外定子对转子的定位力矩的基波相位刚好相位差180°,因此两个定位力矩相叠加时,基波含量相互抑制,使得电机整体的定位力矩大大降低。同理,改变Δθ,不仅可以抑制基波,还能抑制电机定位力矩的2次、3次谐波。
如图5所示,改变Δθ,双定子电机总定位力矩波形呈现的不同波形图。分析两幅图,可以得到结论,通过内外定子错开Δθ角,对抑制双定子电机的定位力矩效果很明显。
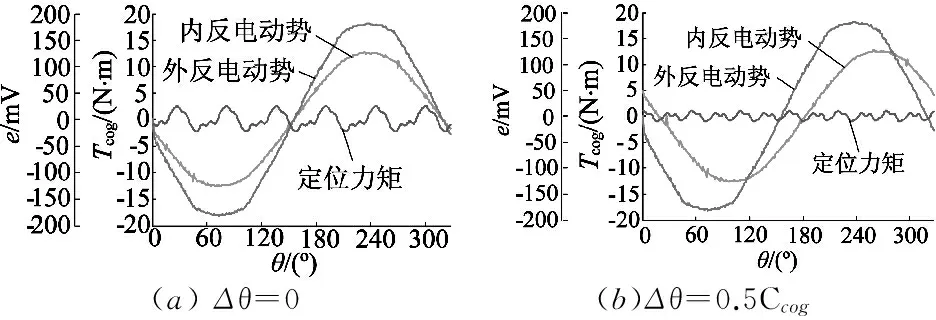
(a)Δθ=0(b)Δθ=0.5Ccog
图5 内外电机定位力矩叠加图
分析定位力矩的公式,可以得到结论,抑制基波时,电机的奇数次谐波都能得到抑制。因为电机定位力矩里面基波含量占的比重最大,所以抑制基波,对电机转矩脉动的抑制最有效。
3 仿真与实验验证
在MATLAB上对该理论进行验证,为了简化仿真,将定位力矩的高次谐波(大于等于4次的谐波)省略掉,并假设内外电机的定位力矩幅值相同,这样更有助于观察错齿结构的双定子电机抑制定位力矩的效果。
双定子电机的MATLAB仿真控制策略为传统的Id=0矢量控制。因为内外定子错开角度Δθ,所以在控制电机运行时,内电机电流相位与外电机电流相位错开相应的电角度。双定子电机虽然是两个定子,但是只有一个转子,所以控制系统只需要一个速度环,两个定子分别对应一个电流环。双定子电机的输出转矩为内定子对转子的转矩加上外定子对转子的转矩。
如图6所示,为磁路并联式同心圆结构的磁通切换双定子电机在MATLAB中仿真结果图。电机起动时,设定闭环转速300 r/min,此时内外定子之间无错齿,在0.02 s时切换内外定子之间的角度Δθ=0.5Ccog。图6(a)为内外定子对转子的合成定位力矩;图6(b)为内外定子对转子的输出转矩;图6(c)为内定子a相以及外定子A相电枢电流波形图。对定位力矩基波进行抑制时,可以选择错开的角度Δθ接近半个360/(2pr),这可以使双定子电机的六相电流相位差接近60°,有助于减小对电网产生谐波。
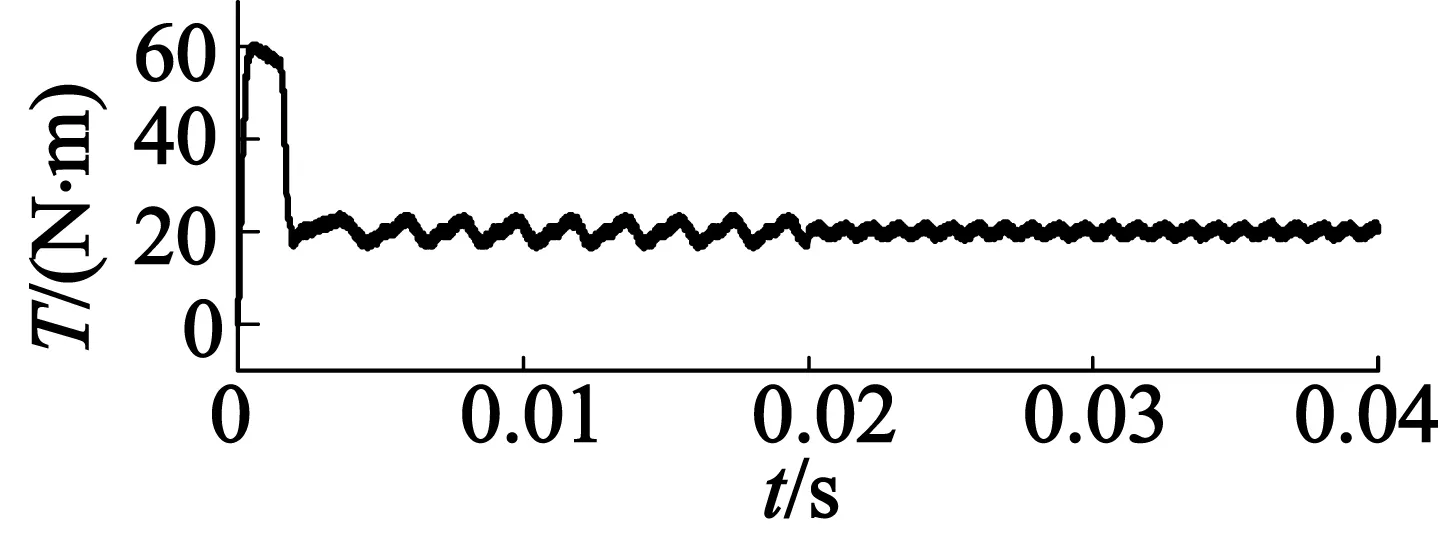
(a) 电磁转矩
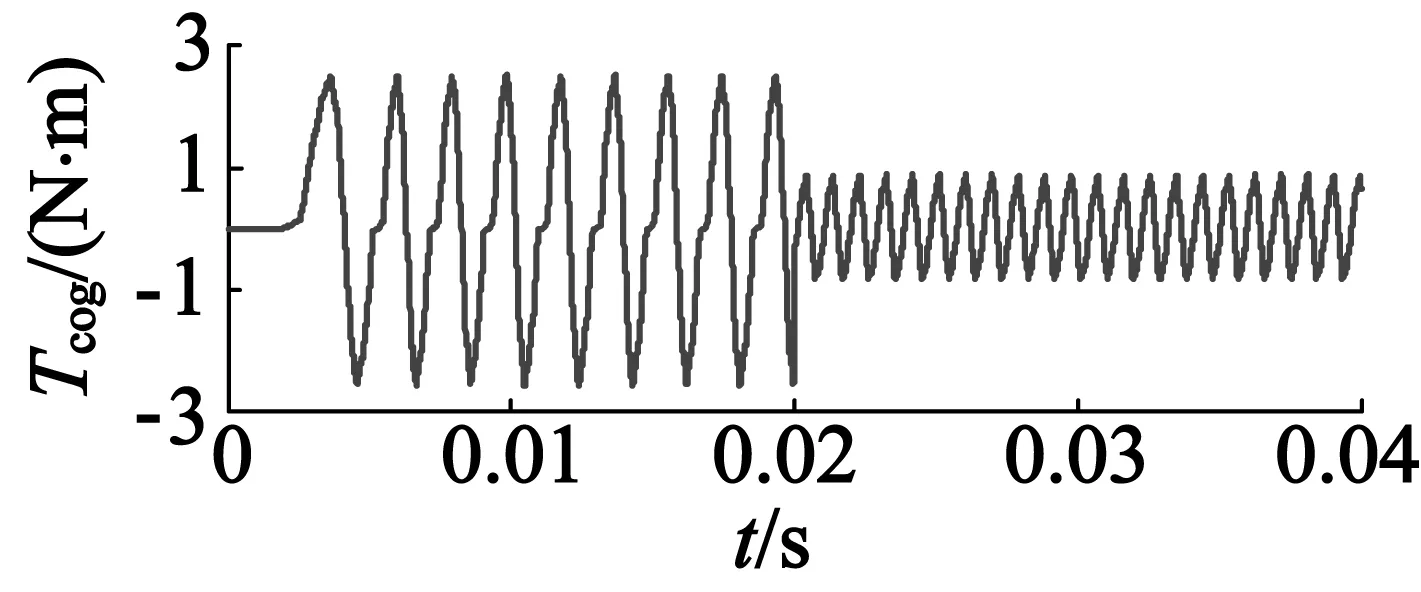
(b) 定位力矩
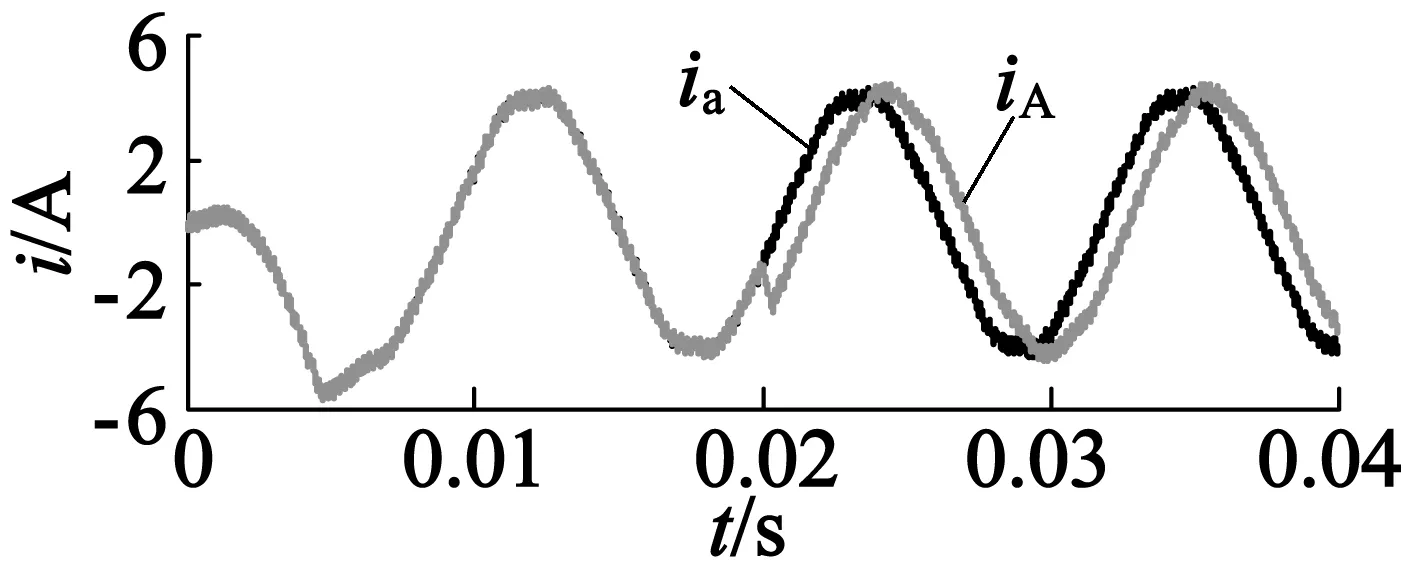
(c) 电枢电流
如图7为磁路并联式同心圆结构的磁通切换双定子电机不同Δθ角时的实验波形图。实验过程中,双定子电机直流侧外加电压为100 V,软件里电流限设置为5 A,控制电机200 r/min闭环运行。待电机空载稳定运行后,不断给电机加载,直至电机无法速度闭环为止。图7(a)是Δθ=0,内外电机定位力矩直接叠加时,电机负载转矩波形以及外定子A相电流和内定子a相电流;图7(b)是Δθ=1.5Ccog,内外电机定位力矩基波抑制时,电机负载转矩波形以及外定子A相电流和内定子a相电流。比较两图可以看出,定位力矩基波抑制之后,转矩脉动的频率增加了,幅值减小了,而且电机在相同的条件下,带载能力提升了。
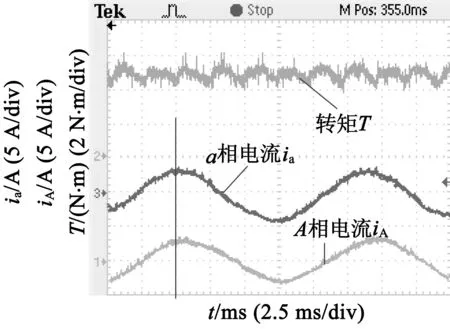
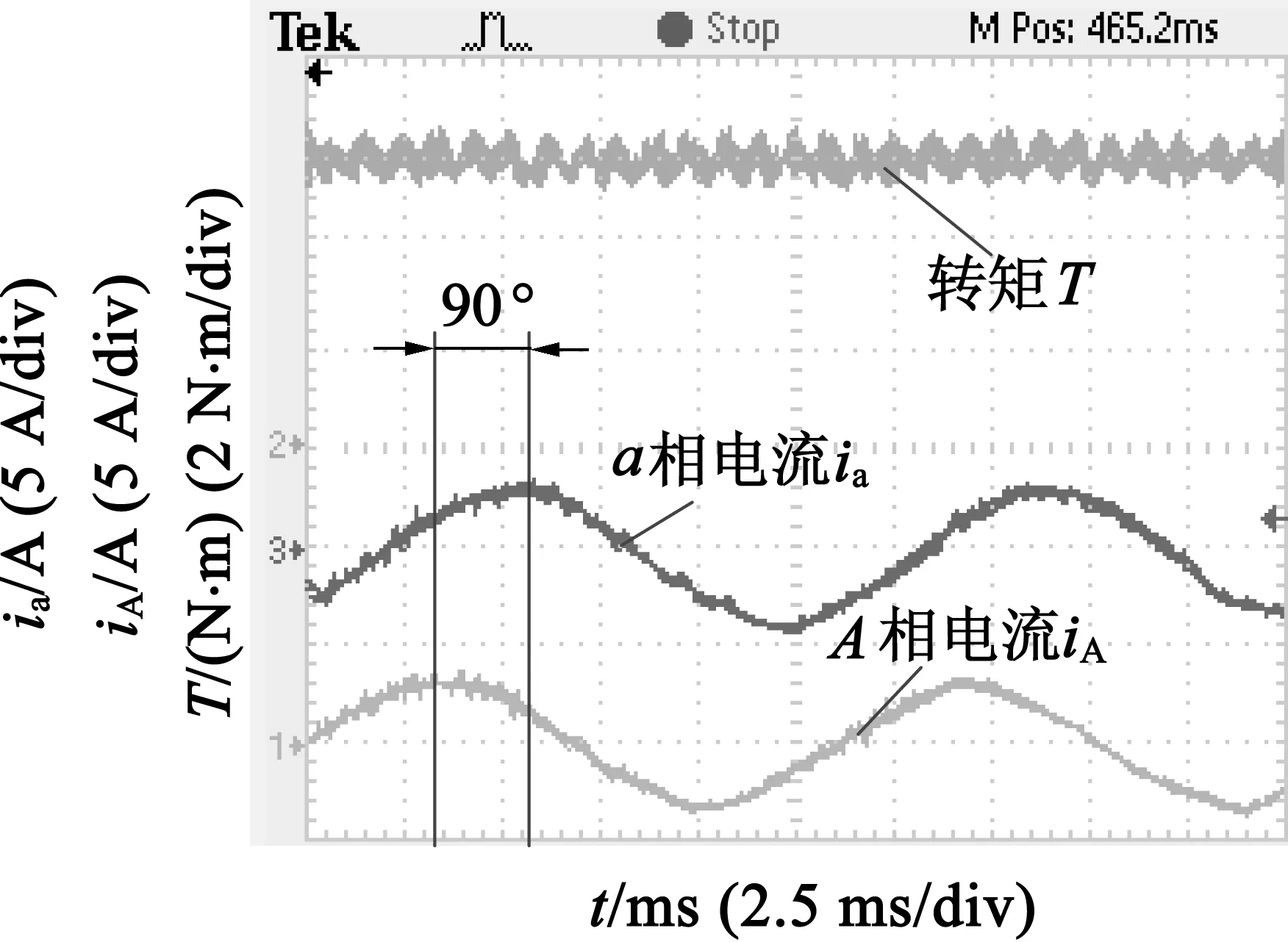
图7 内外电机定位力矩叠加实验波形图
4 结 语
从以上仿真结果和实验结果可以看出,磁路并联式同心圆结构的双定子电机,不仅可以抑制转矩脉动和针对性的抑制某一特定频率的定位力矩谐波,还可以提升电机的效率。
[1] 花为,程明,贾红云,等. 一种注入电流谐波补偿永磁电机定位力矩的控制方法:中国,CN 101515780A[P].2009-04-03.
[2] CHENG Ming,HUA Wei,ZHU Xiaoyong,et al.Stator permanent magnet brushless machines:concepts,developments and applications[C]//11th International Conference on Electrical Machines and Systems,Wuhan,China,2008:2802-2807.
[3] CHENG Ming,CHAU K T,CHAN C C.Static characteristics of a new doubly salient permanent magnet machine[J].IEEE Transactions on Energy Conversion,2001,16(1):20-25.
[4] KIM T H,JANG K B,CHUN Y D,et al.Comparison of the characteristics of a flux reversal machine under the different driving methods[J] . IEEE Transactions on Magnetics, 2005, 41(5):1916-1919.
[5] 王蕾,李光友,张强.磁通反向电机的变网络等效磁路模[J].电工技术学报,2008,23(8):18-23.
[6] HOANG E,AHMED H B,LUCIDARME J.Switching flux permanent magnet polyphased synchronous machines[C]//7th Europe Conference on Power Electronics and Applications.Trondheim,Norway,1997:3903-3908.
[7] CHEN Y,ZHU Z Q,HOWE D.Three-dimensional lumped-parameter magnetic circuit analysis of single-phase flux-switching permanent-magnet motor[J].IEEE Transactions on Industry Applications,2008,44(6):1701-1710.
[8] ZHU Z Q,CHEN J T,YONG P,et al.Analysis of a novel multi-tooth flux-switching PM brushless AC machine for high torque direct-drive applications[J].IEEE Transactions on Magnetics, 2008,44(11):4313-4316.
[9] CHEN J T,ZHU Z Q,HOWE D.Stator and rotor pole combinations for multi-tooth flux-switching permanent-magnet brushless AC machines[J].IEEE Transactions on Magnetics,2008,44(12): 4659-4667.
[10] 花为,程明,ZHU Z Q,等.新型磁通切换型双凸极永磁电机的静态特性研究[J].中国电机工程学报,2006,26(13):129-133.
[11] 黄志文,沈建新,方宗喜,等.用于弱磁扩速运行的三相6/5 极永磁开关磁链电机的分析与优化设计[J].中国电机工程学报,2008,28(30):61-66.
[12] ZHU Z Q,PANG Y,HUA W,et al.Investigation of end-effect in PM brushless machines having magnets in the stator[J].Journal of Applied Physics,2006,99(8):1-3.
[13] PANG Y,ZHU Z Q,HOWE D,et al.Eddy current loss in the frame of a flux-switching permanent magnet machine[J].IEEE Transactions on Magnetics,2006,42(10):3413-3415.
[14] 贾红云,程明,花为,等.基于电流谐波注入的磁通切换永磁电机定位力矩补偿方法[J]. 中国电机工程学报,2009,29(9):83-84.
[15] ISLAM R,HUSAIN I,FARDOUN A,et al.Permanent magnet synchronous motor magnet designs with skewing for torque ripple and cogging torque reduction[J].IEEE Transactions on Industry Application, 2009,45(1):152-160.
[16] 王道涵,王秀和,丁婷婷,等.基于磁极不对称角度优化的内置 式永磁无刷直流电动机齿槽转矩削弱方法[J].中国电机工程学报,2008,28(9):66-70.
[17] 程树康,葛新,高宏伟,等.分数槽无刷直流电动机齿槽定位力矩的研究[J].中国电机工程学报,2008,28(21):107-111.
[18] 杨玉波,王秀和,丁婷婷,等.极弧系数组合优化的永磁电机齿槽转矩削弱方法[J].中国电机工程学报,2007,27(6):7-11.
[19] 沈勇环,陈益广,赵维友.削弱反磁通电机齿槽转矩的两种新方法[J].电工技术学报,2007,22(7):141-144.
[20] 刘承军,张辉,邹继斌.永磁同步电机齿槽定位力矩补偿[J].电工技术学报,2007,22(7):131-135.
[21] 张文敏, 李伟力, 沈稼丰. 永磁无刷直流电动机反电动势及定位力矩的计算与仿真[J].哈尔滨工业大学学报,2006,38(2):299-300.
[22] ZHU Z Q,HOWE D.Influence of design parameters on cogging torque in permanent magnet machines[J].IEEE Transactions on Energy Conversion,2000,15(4):407-412.
Study of Cogging Torque Suppressing for Double Stator FSPM Motor
GONGJian-feng,QUANLi,ZHUXiao-yong,ZONGZai-yun
(Jiangsu University,Zhenjiang 212013,China)
The flux-switching permanent magnet (FSPM) motor has the advantages of high power density, large output torque and essentially sinusoidal back-EMF. However, compared with the traditional permanent magnet synchronous motor and brushless DC motor which permanent magnet in the rotor, FSPM motor torque ripple is relatively large, as a result, it limits the application and popularization of this kind of motor in some fields such as high precision motion control, servo system etc. In this paper, a new method the "inside and outside the motor displacement design and control" was proposed for magnetic flux switching double stator motor, and the theoretical analysis and experimental verification were carried on. In the design of the motor, the magnetic circuit parallel and concentric circles structure were adopted, and at the same time, the internal and external stator were staggered an angle. Through the control of inner, outer stator current phase, the purpose of suppress the cogging torque can be achieved. Both the simulation analysis and experimental research show that, the proposed method can make the motor to maintain high torque density and effectively reduce the total torque ripple of the motor, and it provides an effective method for torque ripple suppression for this kind of doubly salient double stator motor.
suppressed cogging torque; double stator; flux-switching permanent magnet (FSPM); parallel magnetic circuit; concentric circle structure
2015-01-08
国家自然科学基金项目(51377073);教育部博士点基金项目(20113227110002);江苏省高校优势学科建设工程资助项目
TM351
A
1004-7018(2016)01-0017-05