永磁式磁定位器矩角特性的计算与分析
2016-12-06蔡池渊
蔡池渊, 张 娟
(1.中海油田服务股份有限公司 油田技术研究院,北京 101149;2.黑龙江省工业技术研究院,哈尔滨 150001)
永磁式磁定位器矩角特性的计算与分析
蔡池渊1, 张 娟2
(1.中海油田服务股份有限公司 油田技术研究院,北京 101149;2.黑龙江省工业技术研究院,哈尔滨 150001)
作为一种永磁式磁力机械,永磁式磁定位器具有运行效率高、定位准确的特点,在油田随钻测井、医疗器械等方面具有广泛的应用。以一种随钻测井用永磁式磁定位器为研究对象,在对其结构和工作机理进行分析的基础上,采用有限元法计算磁定位器的电磁场和矩角特性,并对不同极数、不同齿宽时的矩角特性进行对比研究。研究结果表明,合理的极对数和齿宽的选择能够有效提高磁定位器的最大转矩。在此基础上,研制了一台样机并进行了实验研究。仿真和实验结果验证了采用数值计算进行永磁式磁定位器分析和设计的有效性。
磁定位器;矩角特性;有限元法
0 引 言
作为一种磁力机械,永磁式磁定位器具有结构简单、运行可靠、运行效率高、定位准确等一系列优点,在油田测井定量采样系统、医疗器械等方面具有广泛的应用[1, 3]。然而,由于尺寸和参数的选择对磁定位器内的气隙磁场的影响较大,磁定位器的矩角特性随尺寸和参数的变化比较敏感。因此,如何合理地选择尺寸和参数,一直是磁定位器研究中的关键问题[4]。
评价磁定位器的主要指标包括矩角特性和最大转矩。在磁定位器的设计中,需要合理确定尺寸和电磁参数,从而在一定的体积下得到尽可能大的转矩。尽管磁定位器的结构比较简单,但是关于其设计计算的参考文献相对较少。本文以一种油田测井定量采样系统用永磁式磁定位器为研究对象,在对其结构和工作机理进行分析的基础上,采用有限元法计算磁定位器的电磁场和矩角特性,并对不同极数、不同齿宽时的矩角特性进行对比研究。
1 工作机理分析与电磁场计算
1.1 结构与工作机理分析
本文所研究的永磁式磁定位器的结构如图1所示。

图1 永磁式磁定位器结构
永磁式磁定位器由定子和转子两部分组成,转子与测井定量采样系统中的电机转子同轴连接,定子固定在系统台架上。其中,转子由转子轭和N、S 极性交替排列的多块永磁体组成,它作为磁定位器磁路中的磁势源,用于提供磁动势,从而产生气隙磁场;定子由带齿槽结构的硅钢片叠压而成。
当电机转子带动磁定位器转子旋转时,根据磁阻最小原理,定子和转子之间将产生转矩,从而提供定位功能。由于定子为磁阻结构,因此定子和转子之间的转矩本质上为磁阻转矩。图2为永磁式磁定位器典型的矩角特性曲线,其中横坐标为转子转角,纵坐标为定转子之间的转矩。

图2 永磁式磁定位器的典型矩角特性曲线
可以看出,a点为磁定位器的不稳定平衡点,c点为磁定位器的稳定平稳点。当电机转子停在a点和c点之间的任意位置时,磁定位器的正向转矩会使得转子继续旋转,最终稳定在c点;同理,当转子停在c点和d点之间的任意位置时,磁定位器的负向转矩会使得转子反转,最终也稳定在c点。这就是磁定位器实现定位功能的原理。因此,在一个机械圆周上,磁定位器有2p个定位位置,其中p为磁定位器的极对数。
需说明的是,在永磁式磁定位器的设计中和分析,静态矩角特性是需要考虑的主要性能指标,尤其是最大输出转矩需满足应用要求。这就需要设计者合理地确定尺寸和电磁参数,从而在一定的体积下得到尽可能大的输出转矩。
1.2 电磁场数值计算
永磁式磁定位器的设计和分析应以电磁场计算为基础。忽略磁定位器轴向有限长度所带来的轴向端部效应时,可通过二维电磁场树脂计算对其进行计算和分析,从而得到静态和动态矩角特性曲线。
本文采用ANSYS Maxwell有限元计算软件,对磁定位器内的二维电磁场进行数值计算。求解区域如图3所示,其中定子外径为49 mm。极对数为6时,磁定位器内的磁场分布如图4所示。
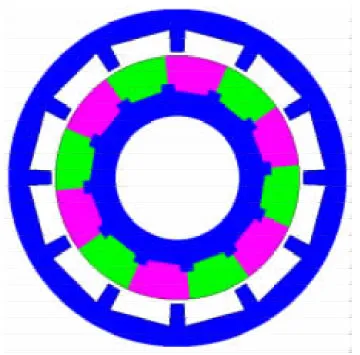
图3 磁定位器的求解区域

图4 磁定位器内的磁力线分布
可以看出,磁定位器内的磁通可分为两部分:主磁通穿过气隙,经定子齿和定子轭形成闭合磁回路,用于产生转矩;而相邻永磁体之间存在较大的漏磁。磁定位器优化设计的目标即是尽可能减小漏磁通,增大主磁通,从而得到尽可能大的转矩。
2 矩角特性计算与分析
2.1 矩角特性计算
利用商用有限元软件,建立稳态电磁场模型,通过逐步改变转子位置,并计算相应的转矩,即可得到永磁式磁定位器的矩角特性曲线。当定子外径为49 mm,轴向长度为23 mm,极对数为6,定子齿所跨角度为10°时,计算得到磁定位器的矩角特性如图5所示。

图5 极对数为6时的矩角特性
可以看出,在磁定位器的矩角特性中,主要成分为基波转矩,同时也存在较大成分的二次转矩分量,它使得矩角特性曲线的左右半周呈现不对称现象。
2.2 极对数和定子齿宽对矩角特性的影响分析
在永磁磁力耦合器主要尺寸一定的前提下,磁定位器的极数对输出转矩的影响比较大。若磁定位器的极数较少,由于此时单个磁极所跨的机械角度较大,气隙中磁通密度将呈现平顶波,使磁密的幅值降低,因此磁定位器的最大转矩也将减小;反之,若过度增加磁定位器的极数,磁极间漏磁将增加,使永磁体的利用率降低,最大输出转矩也将下降。此外,定子齿宽对磁定位器的转矩也有较大的影响;定子齿宽影响气隙磁密的大小和气隙磁场分布,从而影响磁定位器的矩角特性。
本文分别计算了5对极、6对极和7对极三种情况下,定子齿所跨角度从4°变化到14°时永磁式磁定位器所能传递的最大转矩,其结果如图6所示。
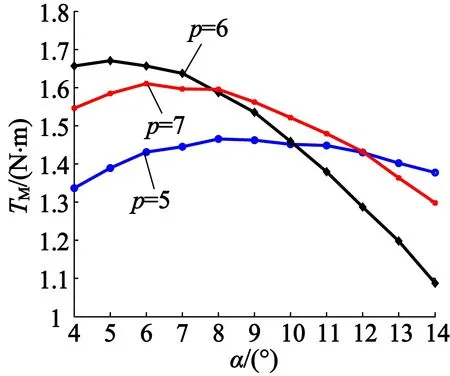
图6 不同极对数时的矩角特性比较
通过对比可以看出,在本文的给定尺寸下,当极对数为6、定子齿所跨角度为5°时,可以得到最大转矩。
3 实验研究
根据以上计算结果,本文制作了样机,其示意图如图7所示。

图7 永磁式磁定位器样机
本文利用压力传感器对6对极磁定位器样机的矩角特性进行了测试。具体测试过程:将磁定位器定子通过卡盘固定在分度盘上,转子通过刚性杆水平地压按在传感器上。在测试中,需保证刚性杆始终处在水平位置,否则将对测试结果产生较大的影响。通过调整分度头的位置来改变磁定位器转子和定子之间的角度,将压力传感器的输出电压换算成对应的压力值,然后乘以刚性杆的长度(即力臂)可获得在相应位置处转子和定子之间所传递的转矩大小。
测试得到的最大转矩约为1.6 N·m,而计算得到的最大转矩为1.671 N·m。
可以看出,测试结果与有限元计算结果之间的误差较小,验证了采用数值计算进行永磁式磁定位器设计和分析的有效性和正确性。两者之间的误差主要是由于永磁体磁特性不一致造成的。
4 结 论
(1)永磁式磁定位器的转矩中除了基波分量外,还存在较大成分的二次分量。
(2) 极对数和定子齿宽对永磁式磁定位器的矩角特性有较大的影响。
[1] KIM Cherl-Jin,LEE Kwan-Yong,HAN Kyoung-Hee,et al.A study on the constant braking performance of eddy current braker with speed variation[C]//Proc.of IEEE Int.Conf.Electrical Machines and Systems (ICEMS),北京,2003:217-221.
[2] 李勇,崔友,陆永平.一种高速电磁制动器制动过程的动态特性分析[J].电工技术学报,2007,22(8):131-135.
[3] 崔予柯.线性永磁制动器的原理与特性研究[J].煤矿机电,2012,(3):59-61.
[4] 菅志军.永磁磁力耦合器矩角特性和涡流损耗的研究[J].微电机,2013,45(8):34-37.
Computation and Analysis of Torque-Angle Characteristic of Magnetic Trackers with Permanent Magnet Excitation
CAIChi-yuan,ZHANGJuan
(1.Oilfield Technology Research Institute,COSL,Beijing 101149,China; 2.Industrial Technology Research Institute of Heilongjiang Province,Harbin 150001,China)
As a kind of permanent-magnet(PM)-type magnetic machinery, the PM magnetic tracker apparatus enjoys the features of high efficiency, accurate positioning, and has been widely used in oil field logging, medical equipment, etc. In this paper, a PM magnetic tracker used in oil field logging was set as the research object, and its structure and working principle were analyzed. Based on it, the magnetic field and torque-angle characteristic were calculated using finite element method. Further, the pole and stator tooth width were optimized to achieve the higher torque. It is shown that the reasonable choice pole number and tooth width can effectively improve the maximum torque of the magnetic tracker. On this basis, a prototype was designed and manuscript. The comparison of experimental and calculation results prove the validity and correctness of the analysis above.
magnetic tracker; torque-angle characteristic; finite element method
2015-04-27
TM351
A
1004-7018(2016)01-0022-02