基于ARM Cortex-M4的永磁无刷直流调速系统设计
2016-12-06张从鹏邢庆辉
张从鹏,邢庆辉
(北方工业大学,北京 100144)
基于ARM Cortex-M4的永磁无刷直流调速系统设计
张从鹏,邢庆辉
(北方工业大学,北京 100144)
介绍了一种以ARM Cortex-M4芯片作为数字信号控制器,智能功率模块(IPM)为驱动电路的永磁无刷直流电机的调速系统。详细阐述了该调速系统的软硬件设计,并对调速系统搭建实验平台进行了对无刷直流电动机的调速控制测试。系统测试实验结果表明:该系统性能运行稳定、可靠,速度误差不超过1%,能满足基本的工业应用。
永磁无刷直流电动机;STM32F407;智能功率模块;功率驱动
0 引 言
随着微电子、电力电子技术的发展,对现代控制理论和对永磁材料研究的深入,具有体积小、结构简单、调速性能好、效率高等诸多优点的永磁无刷直流电动机在工业上的运用越来越广泛。
目前,数字化智能控制直流调速的出现,使得直流调速的性能得到很大提升,并很快成为直流调速的主导。然而国内对数字化直流调速系统的研究相对较迟,形式单一,并且在很大程度上仍依赖于国外产品。基于这种情况,本文提出了一种基于ARM Cortex-M4处理器STM32F407的永磁无刷直流电动机的调速控制系统,研究调速系统的硬件实现电路和软件控制算法,开发满足工业现场应用的永磁无刷直流电动机调速控制系统,具有一定的应用价值与现实意义。
1 系统整体结构
1.1 永磁无刷直流电动机调速系统的组成
图1为永磁无刷直流电动机的系统结构图。该系统是一个典型的三环控制系统,包括电流环、速度环和位置环。电流控制器的作用是:实现快速的动态响应性能,使电流在动态响应中不出现超调现象,为此采用PI控制。速度控制器是为了增加系统的抗扰动能力,即调节速度的波动,为电流环给定。位置控制器是通过外部的脉冲给定,给定和通过永磁电机的编码器反馈位置信息进行位置环的PID来完成对速度环的给定。其中速度控制器的反馈也来自编码器。

图1 永磁直流无刷电动机的系统基本结构
1.2 控制系统硬件设计
本设计的永磁无刷直流电动机调速系统的硬件结构如图2所示。采用ARM公司的高性能主控制芯片STM32F407为核心,实现调速系统的速度控制
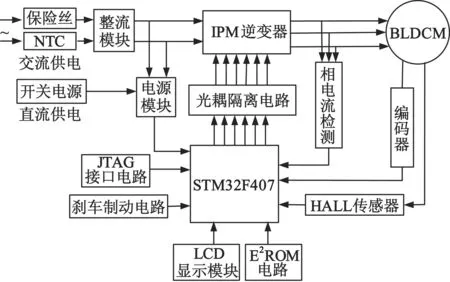
图2 永磁直流调速系统的硬件结构
器、电流控制器的控制、JTAG调试接口电路、LCD状态显示电路、AD采集信号等相关功能。同时以三菱公司的智能功率模块FSAM20SH60A的IPM为逆变器开关元件来完成驱动单元。
1.2.1主控电路
主控芯片STM32F407是基于Cortex-M4架构内核,集成丰富的电机库接口电路,同时可实现永磁矢量定向控制的理想平台,内部嵌有高级定时器、编码器接口、AD采集接口等外设,极大地方便了直流调速的控制系统。
1.2.2电源控制部分
电源部分采用24 V单独供电输入,通过可调开关电源芯片LM2596进行电压转换,设定为15 V,为IPM驱动电路、IGBT过流保护和刹车电路等电路进行供电。设定为5 V,为光耦隔离电路、运算放大电路、编码器接口电路、USB电路、二极管等电路电源供电。电源转换电路如图3所示。
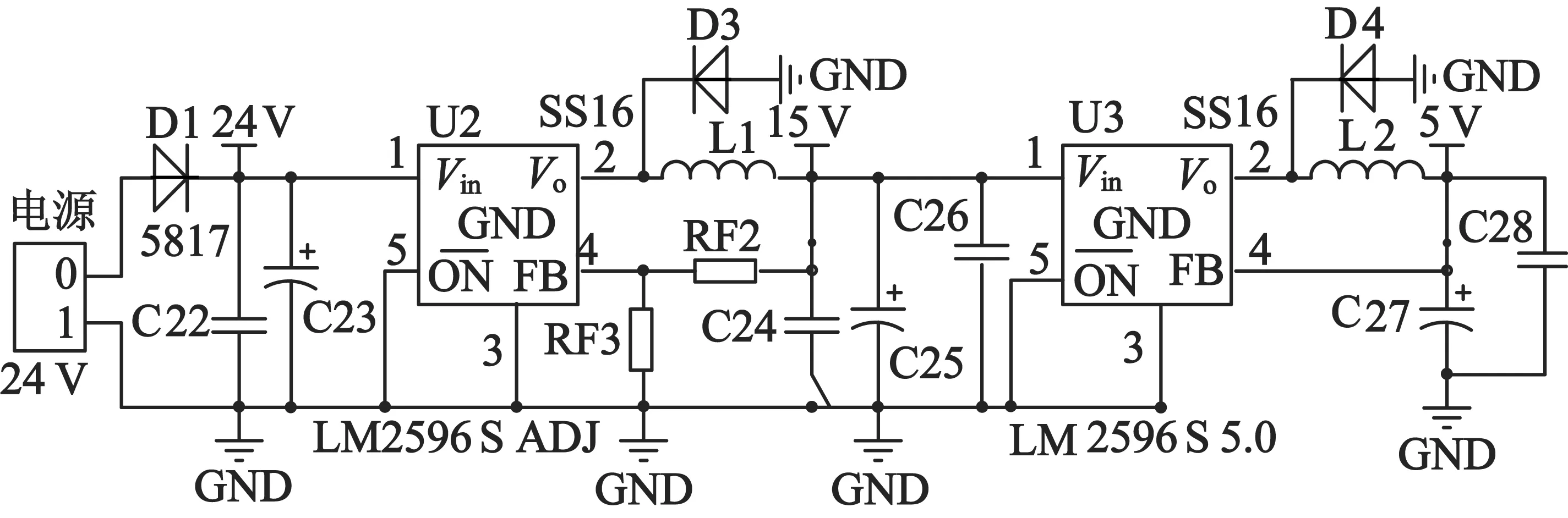
图3 电源转换电路
1.2.3三相功率驱动控制电路
逆变器电路是伺服驱动系统的主体,向永磁电机中输入电流,才能使其才能旋转。三相功率驱动控制电路选择的是IPM模块FSAM20SH60A,内部集成了IGBT三相桥臂功率器件、驱动电路、电流保护电路、电源欠压保护等保护电路,如图4所示。STM32通过高级定时器输出6路的PWM脉冲信号,作为IPM的输入来控制逆变桥的导通和关断,从而实现电机的精确控制。

图4 三相功率驱动电路
1.2.4三电阻采样电路
本设计采用是三电阻电流采样电路,功率电阻采用5 mΩ,5 W。电流采样放大电路如图5所示,选用的芯片是OPA4350,该芯片具有高精度、38 MHz高带宽,低噪声、高转换速率(22 V/μs),能满足该设计放大电路的要求。
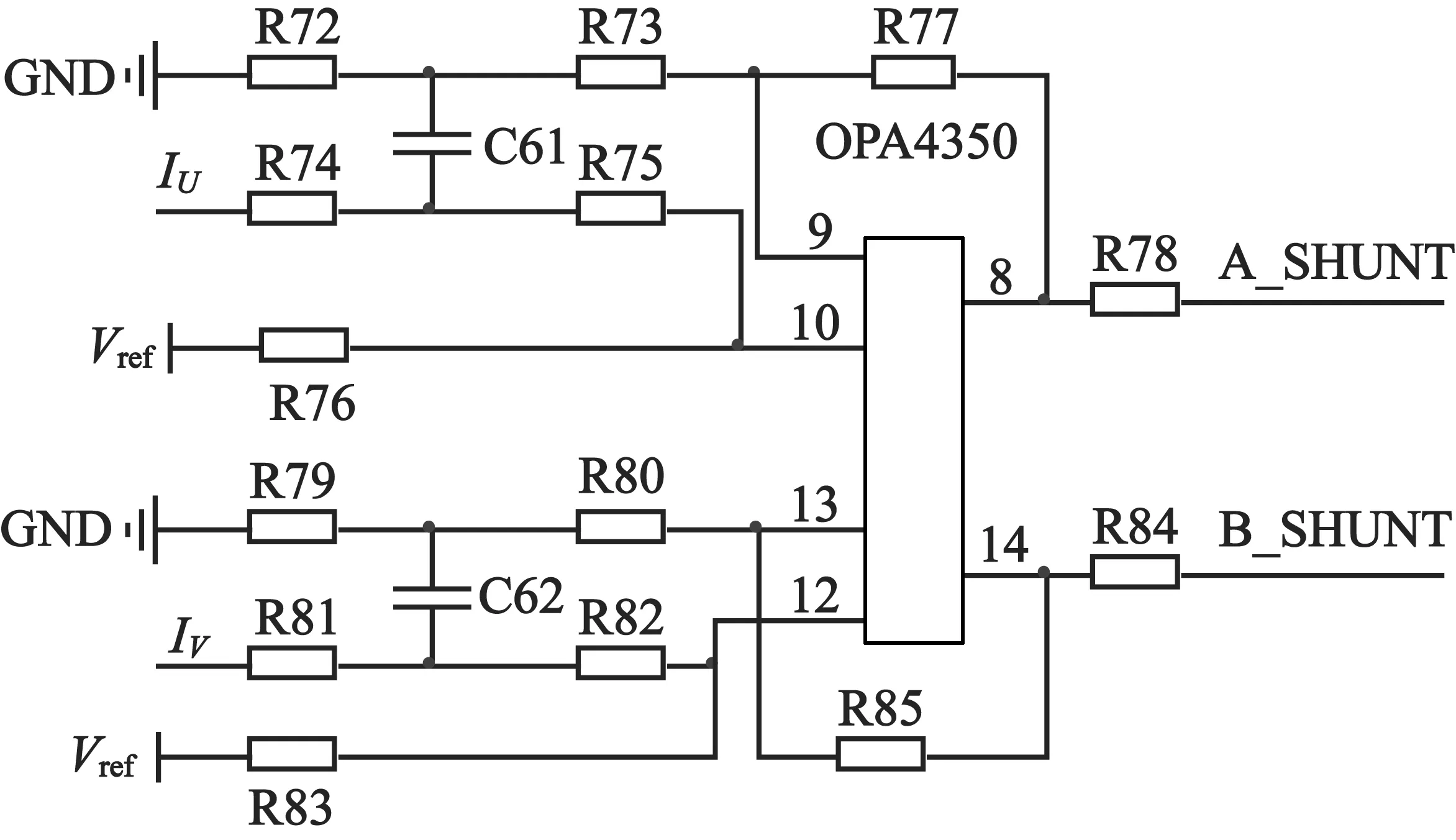
图5 电流采样放大电路
1.2.5 显示接口模块
本设计的人机交互接口采用的是TFT型LCD彩色液晶屏模块,分辨率为320×240,与单片机的连接如图6所示。
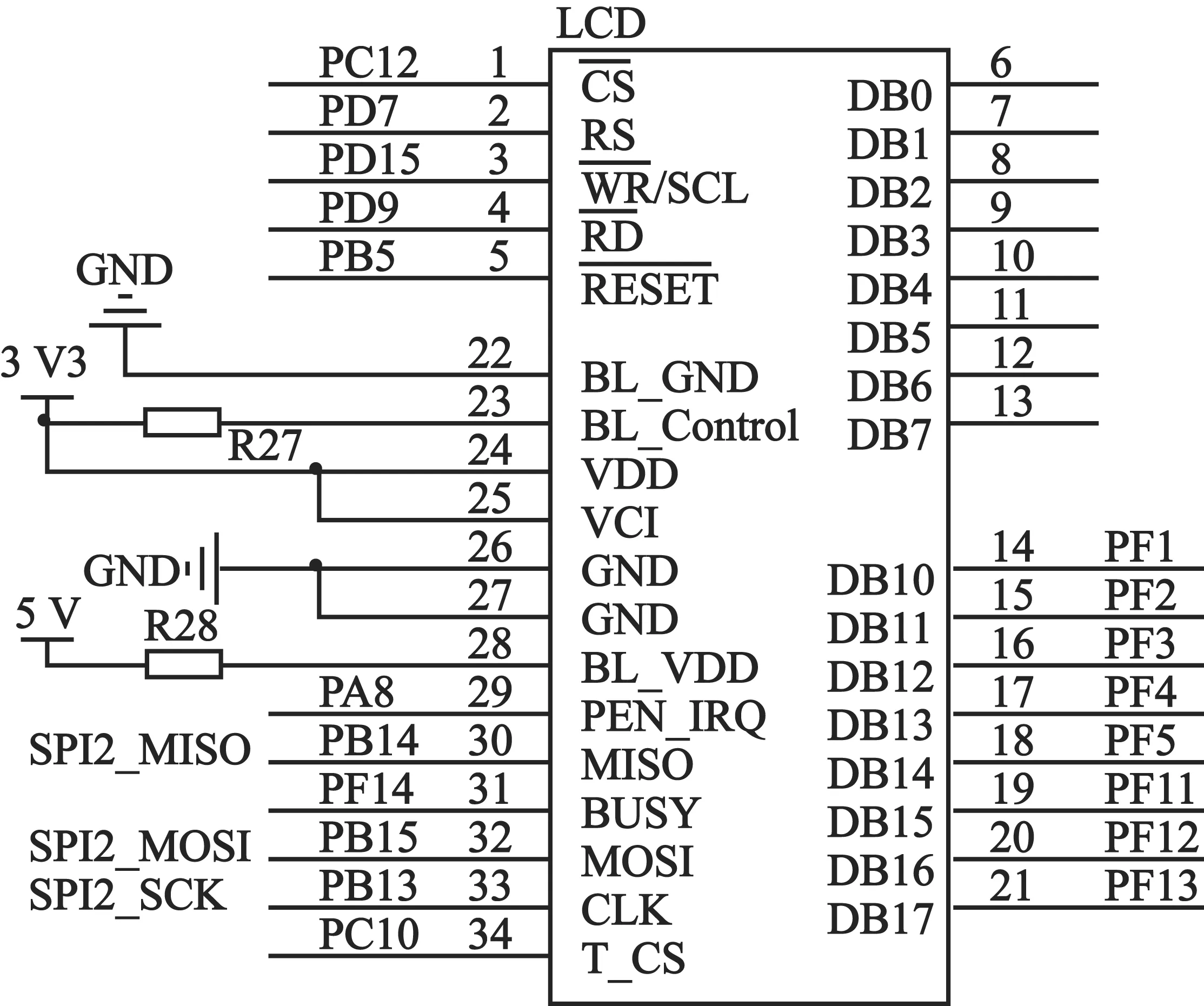
图6 TFT320240彩色液晶接口模块
2 系统软件程序设计
永磁无刷直流电动机调速系统的软件部分主要由主程序、中断服务程序、数据显示三部分组成。本程序设计在Keil μVision集成开发环境进行标准C语言开发。主程序包括系统时钟配置,I/O接口的初始化,定时器的初始化,LCD模块初始化,AD数据采集和转化设置等,然后进入循环程序。主程序如图7所示。
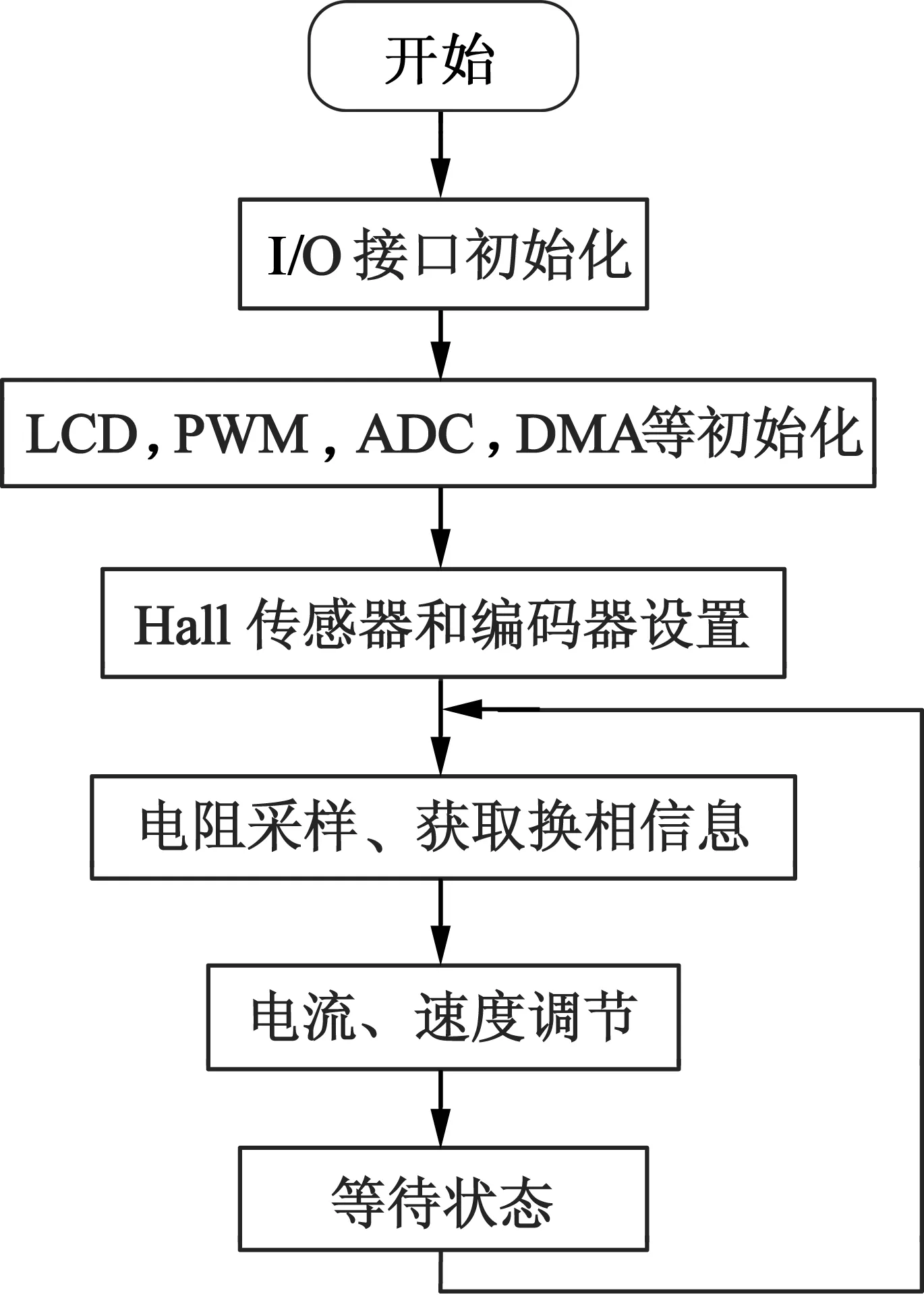
图7 主程序框架图
中断服务程序是在高级定时器TIM1中断里进行的。首先对电机转子的速度和电流进行采集处理,PID调节,生成六路PWM等。外部中断部分为编码器定时中断,主要对电阻采样的数据处理,转子位置分析,换相以及正反转分析等。图8为PWM中断服务函数流程图。

图8 PWM中断服务函数流程图
3 实验测试及结果分析
永磁无刷直流电动机调速系统的性能测试实验如图9所示。驱动的电机型号为42BLFOI电机,额定电压为24V,额定电流为1.9A,最高转速为4 000 r/min,额定功率为26 W。
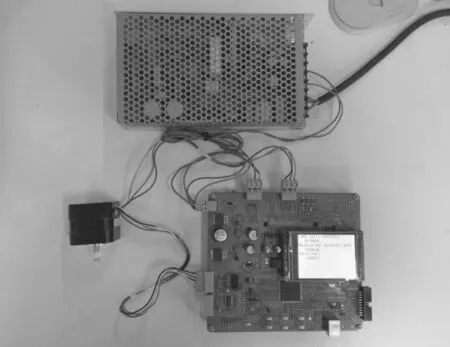
图9 永磁无刷直流调速系统测试
通过示波器对控制器的U相和V相的波形进行观察,如图10所示。可看出,三相电流的波形处于稳定状态,运行平稳。实验结果表明,本设计系统能够保证无刷直流电机的速度和电流控制,运行平稳,具有较高精度。
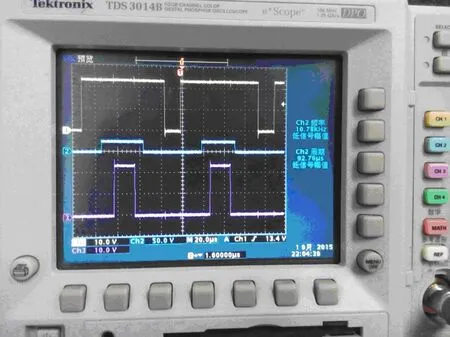
图10 三相波形
4 结 语
本文开发了基于 ARM Cortex-M4的永磁无刷直流电动机调速系统,速度控制实验结果表明,该方案可行,集成度高,开发周期短,系统安全可靠,是一种新的全数字调速系统方案,能满足基本的工业应用,并且该设计可推进永磁直流无刷电动机调速系统向着智能化、数字化、模块化方向发展。
[1] 张杰. 基于SVPWM控制的无刷直流电机的建模与仿真[J].机电工程,2013,30(9):1106-1108.
[2] 凌钢.基于DSP+FPGA的永磁同步电动机伺服驱动器研究[D].芜湖:安徽工程大学,2010:2-3.
[3] 刘波文.ARM Cortex-M3应用开发实例详解[M].北京:电子工业出版社,2011:398-402.
[4] 李小明.无刷直流电机调速系统研究与设计[J].科技信息,2010,(35):124-125.
[5] 夏长亮,方红伟.永磁无刷直流电动机及其控制[J].电工技术学报,2012,27(3):25-34.
Design of Permanent Magnet Brushless DC Speed-Regulating System Based on ARM Cortex-M4
ZHANGCong-peng,XINGQing-hui
(North China University of Technology,Beijing 100144,China)
A speed-regulating system of the permanent-magnet brushless DC motor which used ARM Cortex-M4 as the digital signal controller and the intelligent power modular (IPM) as drive circuit was introduced. The software and hardware design of the speed-regulating system was elaborated in detail. And the experimental platform was built to test speed cotrol of the permanent-magnet brushless DC motor. System test results show that the system has stability and reliability,and its velocity error does not exceed 1%. It can meet the basic industrial applications.
permanent magnet brushless DC motor; STM32F407; IPM; power drive
2015-07-17
TM351;TM33
A
1004-7018(2016)01-0090-03
张从鹏(1975-),男,博士,副教授,研究方向为数字化制造技术与装备。
