不稳定串级时滞过程的改进型内模控制
2016-12-06朱清智
朱清智,张 毅
(河南工业职业技术学院,河南南阳473000)
不稳定串级时滞过程的改进型内模控制
朱清智,张 毅
(河南工业职业技术学院,河南南阳473000)
针对不稳定串级时滞过程,提出了改进型内模控制(IMC)方法。控制系统副回路采用改进的内反馈控制结构,能够有效去除副控制器对主回路的影响,从而简化主控制器的设计。主回路采用改进的内模控制结构,在反馈通道增加干扰抑制控制器,使主电路的跟踪特性和干扰抑制特性实现解耦,通过对控制器进行设计,能有效地抑制被控过程参数的变化和干扰对系统性能的影响。
串级控制;内模控制(IMC);二自由度Smith预估控制;最大灵敏度;时滞过程
0 前言
在工业过程控制领域特别是化工领域,很多控制过程是开环不稳定的,而且在变量的控制回路和检测回路中都存在时滞现象,因此,对于这些开环不稳定时滞过程的控制有很大的困难。针对典型的开环不稳定时滞过程,通过改进传统内模控制结构,增加了两个控制器,改善了常规内模控制只能用于开环稳定的控制过程,并将其应用于并联式串级控制中。
1 改进型内模控制
针对不稳定串级时滞过程,提出了一种改进型的内模控制结构,如图1所示。其中,副回路采用内反馈控制结构,r2、d2和y2分别为副回路设定值输入、干扰信号、输出信号;C2为副控制器;Gp2为副回路控制过程,Gp2m为副过程模型;GL2为副回路干扰通道模型。主回路采用改进的IMC串级控制结构,r1、d1、y1分别为主回路设定值输入、干扰信号、输出信号;Gp1为主回路控制过程;Gm为主回路等效模型不含时滞部分,GL1为主回路干扰通道模型;K1为主回路设定值跟随控制器;K2为主回路干扰抑制控制器;K0用于稳定主回路控制过程Gp1。
选择的主、副控制过程均为一阶加时滞的形式,副控制过程采用稳定的一阶加时滞模型,主控制过程采用不稳定的一阶加时滞模型,因此取
式中k1、k2、T1、T2、τ1、τ2分别为主、副过程的稳态增益、时间常数和滞后时间。
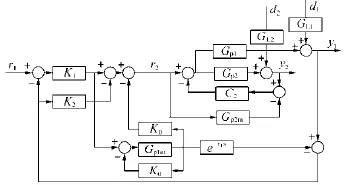
图1 改进的IMC并联式串级控制结构Fig.1Modified IMC structure for parallel cascade control
由控制结构图可得:
副回路

主回路

令

则可得

由式(4)可知,在标称时该控制结构同时兼顾了设定值响应、扰动抑制和稳定的作用,而且它们之间的控制实现了解耦,无需在设定值跟踪特性与扰动抑制特性之间折中。
2 副回路控制器设计
由副回路的控制结构可知,副控制器C2(s)可依据内模控制方法设计,根据内模控制原理得[1,3-4]

式中Gm20为被控过程模型Gp2m(s)中的最小相位部分;f2(s)为低通滤波器,选择f2(s)的目的是保证C2(s)有理和使系统具有一定的鲁棒性。
考虑Gp2m(s)为一阶加时滞形式,因此f2(s)选用以下形式

式中λ2为滤波时间常数。
则副控制器C2(s)为

式中λ2的取值范围为0.486τ2~4.146τ2。
3 主电路控制器设计
3.1 主电路控制过程稳定控制器K0设计
由图1可知,主回路控制过程Gp1(s)的无时滞部分含有一个不稳定极点,设计K0的目的就是消除Gp1(s)无时滞部分的不稳定极点。由图2可知
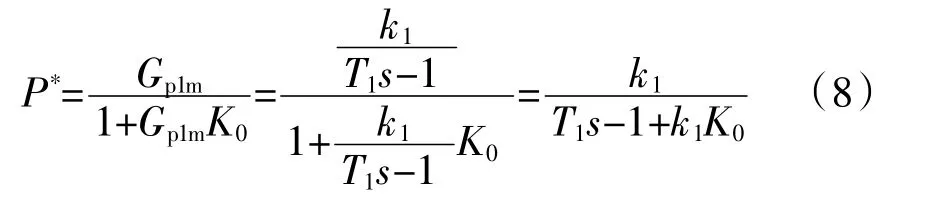

图2 改进的IMC并联式串级控制等效结构Fig.2An equivalent Modified IMC structure for Parallel cascade control
由期望的稳定形式可知

因此,可得

3.2 主电路设定值跟踪控制器K1设计
经K0稳定后的主电路控制过程P的模型为

针对模型P,主回路设定值跟踪控制器K1可依据内模控制的设计方法进行设计,取低通滤波器f(s)如下

则

式中λ1为待整定参数。
3.3主电路扰动抑制控制器K2设计
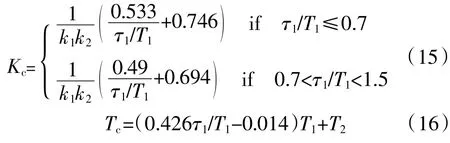
主电路扰动抑制控制器K2的设计可参考文献[3],选择控制器K2为PD形式:

其中:
4 仿真验证
选择被控过程为:
为了验证所述方法的有效性,运用Matlab软件进行仿真。选择上升时间tr、IAE和ISE作为系统闭环性能的质量指标。
本研究控制器设计取λ2=0.2,由式(6)、式(7)和式(17)可得副控制器C2(s)为

由式(8)、式(10)和式(17)可得主电路控制过程(Gp1)稳定控制器K0为

由式(12)、式(13)和式(17)可得主电路设定值跟踪控制器K1为

由式(14)~式(17)可得主电路扰动抑制控制器K2为

主回路设定值跟踪控制器参数分别取λ1=2.0、λ1=4.0、λ1=6,系统仿真在t=0时设定值产生单位阶跃变化,在t=120 s时加入幅值为-0.2的输出扰动,过程在标称下系统的单位阶跃响应曲线和性能指标如图3所示。
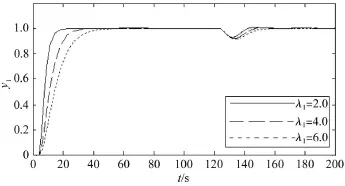
图3 标称系统的单位阶跃响应Fig.3Step responses with nominal system
为验证系统鲁棒性,主电路控制对象Gp1(s)的时滞τ1分别同时产生+10%和-10%摄动时,取λ1=4.0系统的单位阶跃响应曲线和性能指标如图4所示。
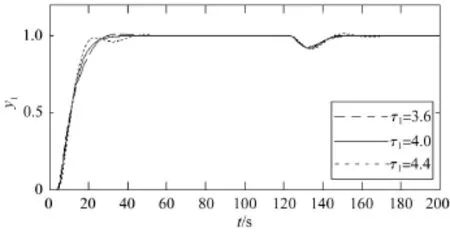
图4 摄动系统的单位阶跃响应Fig.4Step responses with perturbed system
5 结论
针对串级不稳定时滞过程,本研究提出改进的二自由度内模(IMC)控制结构对扰动抑制和镇定都有良好的控制效果。增加的两个控制器K0、K1分别用于镇定控制对象的不稳定部分和抑制系统的扰动,使得系统的给定值响应和负载干扰响应完全解耦。控制算法简单,参数整定方便,易于工程应用,对提高工业过程控制系统的性能有一定的实际意义。
[1]Zhao Z C,Liu Z Y,Zhang J G.IMC-PID tuning method based on sensitivity specification for process with timedelay[J].Journal of Central South University of Technology(English Edition),2011,18(4):1153-1160.
[2]Wang Y G,SHAO H H.PID Auto-Tuner Based on Sensitivity Specification[J].Chemical Engineering Research and Design,2000,78(2):312-316.
[3]Jones R W,Tham M T.Maximum Sensitivity based PID Controller Tuning:A survey and comparison[A].Proceedings of the SICE-ICASE[C].International Joint Conference. IEEE,2006:3258-3263.
[4]Azar A T,Serrano F E.Robust IMC-PID tuning for cascade control systems with gain and phase margin specifications [J].Neural Computing and Applications,2014,25(5):983-995.
[5]赵志诚,刘志远,张井岗.一种时滞过程内模PID控制器鲁棒整定方法[J].信息与控制,2010,39(5):526-530.
Modified internal model control for unstable series process with time delay
ZHU Qingzhi,ZHANG Yi
(He'nan Polytechnic Institute,Nanyang 473000,China)
For the unstable cascade time-delay process,a modified internal model control(IMC)method is proposed.The secondary loop uses the improved internal control structure;it can effectively remove the influence of secondary controller on the main loop,thereby simplifying the design of the main controller.The main loop uses a modified internal model control(IMC)method structure,adds the disturbance rejection controller in feedback control channel,and so the setpoint tracking characteristics is decoupled from the disturbance rejection characteristics.The designed controller can effectively suppress the influence of the process parameters change and disturbance on system performance.
cascade control;internal model control;two degrees of freedom Smith predictor control;maximum sensitivity;delay process
TG409
A
1001-2303(2016)08-0055-03
10.7512/j.issn.1001-2303.2016.08.13
2016-04-01;
2016-06-06
朱清智(1980—),男,河南南阳人,讲师,主要从事自动控制系统的研究与教学工作。
