UWB MIMO生物雷达多静止人体目标成像方法研究
2016-12-03梁福来李浩楠祁富贵王健琪
梁福来 李浩楠 祁富贵 安 强 王健琪*
①(第四军医大学生物医学工程学院 西安 710032)
②(第四军医大学学员一旅 西安 710032)
UWB MIMO生物雷达多静止人体目标成像方法研究
梁福来①李浩楠②祁富贵①安 强①王健琪*①
①(第四军医大学生物医学工程学院 西安 710032)
②(第四军医大学学员一旅 西安 710032)
由于临近多静止人体目标之间存在较强的相互干扰,仅利用单通道生物雷达的距离像难以区分多个静止人体目标。为解决上述问题,该文利用超宽带多输入多输出(UWB MIMO)生物雷达获取多静止人体目标的2维高分辨图像,从空间上更好地分隔多静止人体目标,然后基于UWB MIMO图像的慢时间序列对人体生理信号进行增强,有效抑制人体目标间的相互干扰。实测数据结果证明该文所提方法能够获得相互靠近的多静止人体目标的高分辨图像,使后续的多静止人体目标高性能检测与定位成为可能。
生物雷达;超宽带;多输入多输出;成像
1 引言
生物雷达是以探测生命体为目的的一种新概念雷达,它综合运用雷达信号处理、生物医学工程、电子工程等技术,能够穿透非金属介质对人体目标进行远距离、非接触的探测与定位,广泛应用于灾后搜救[1]、反恐维稳等[2]。与传统的军事和民用目标不同,生命体目标具有独特的生理结构和行为特征。即使处在束缚条件下,生命体仍存在呼吸、心跳等生理活动引起的体表微动,生物雷达便是以此为依据探测和识别生命体目标。
现有的生物雷达可分为单通道和多通道两种体制。单通道生物雷达主要采用连续波(Continuous Wave, CW)[3]和超宽带(Ultra Wideband,UWB)[4–6]两种体制。文献[7]基于CW雷达提出了一种广义最大似然比检验方法估计场景中人体目标的数目,但不能估计人体的位置,并且在场景中存在多人体目标时,难以克服多人体目标间的干扰。
低频UWB生物雷达具有较强的穿透能力和较高的距离分辨率,是当前单通道生物雷达技术的研究热点。文献[8]利用UWB冲激生物雷达成功估计水泥墙后两个静止人体目标的呼吸频率。文献[9]建立了步进频率UWB雷达模拟实验系统,验证了UWB生物雷达在人体目标检测以及对呼吸、心跳信号提取方面的可行性。
由于单通道生物雷达不具备横向分辨率,其距离像中包含的信息是人体高维生理信息在雷达视线方向的投影,存在信息模糊,为后续的多静止人体目标检测与定位带来很大的难度。因此,部分学者将目光转向多通道生物雷达系统的研究。Takeuchi T等人探索了2维天线阵列对人体目标的探测与定位技术[10],Lubecke O B等人证明了利用多通道CW雷达实现多个人体目标探测的可行性[11]。第四军医大学研究小组利用3通道UWB冲激雷达进行多个静止生命体目标的探测与定位[12]。上述多通道生物雷达主要是通过对多通道人体信息的融合处理提高探测性能,采用的阵元数目少,难以得到高分辨2维图像。
多输入多输出(Multiple-Input Multiple-Output, MIMO)雷达是一种特殊的多通道雷达。MIMO生物雷达利用虚拟阵元技术扩展原有物理接收阵列的孔径长度,从而产生更窄的波束方向图,提高阵列的横向分辨率[13]。将UWB技术与MIMO技术结合,可得到2维高分辨图像。Akela公司开发的随机阵列穿墙成像系统[14],其工作频率范围为0.5~2.0 GHz, 可以透过混凝土墙检测到墙后6.5 m处人体的呼吸,并可得到运动人体的轨迹合成图像。加拿大R&D防卫部门的研究小组实现了移动目标跟踪及人体目标和房间格局的2维成像(图4)[15]。Hu J等分析了UWB MIMO雷达应用于运动人体目标指示时出现的阴影遮蔽效应,探讨了抑制该效应的方法[16]。以上结果表明,现阶段UWB MIMO生物雷达成像主要以运动人体目标或建筑物内部层次结构等静态非生命体目标作为探测对象,对多静止人体目标成像缺乏深入的研究。
静止多人体目标雷达成像不但是提高识别和性能的重要手段,还有利于提高人体目标之间以及人体目标与环境杂波之间的空间分离性,对于提升生物雷达的探测性能和环境适应性具有重要意义。人体目标是一类特殊目标,体现在其具有特殊的生理微动信息。本文主要讨论静止多人体目标的MIMO成像方法,在此基础上利用生理微动信息改善成像质量,提高生理体征信号的信杂比。
本文的结构如下:第2节分析了静止人体目标生理体征信号的UWB MIMO回波模型;第3节提出了多静止人体目标MIMO成像方法;第4节给出实测数据处理结果,证明了本文所提方法的有效性;第5节给出了结论。
2 多静止人体目标生理体征信号UWB MIMO回波模型
若不考虑随机体动的影响,人体生理体征微动可近似为几组s简谐振动,即第m个接收天线、第n个接收天线到第p个人体目标胸腔表面的瞬时距离可表示为:

其中,t为快时间,τ为慢时间,bm,n,p为收发天线到人体胸腔振动中心的距离,Ap表示人体呼吸微动幅度,fp表示人体呼吸频率,res(t+τ)表示除呼吸心跳外其它人体微动引起的距离变化。人体胸腔表面反射的雷达回波时延可表示为其中c为光速。
UWB MIMO生物雷达第m个接收天线、第n个接收天线的回波模型如下:
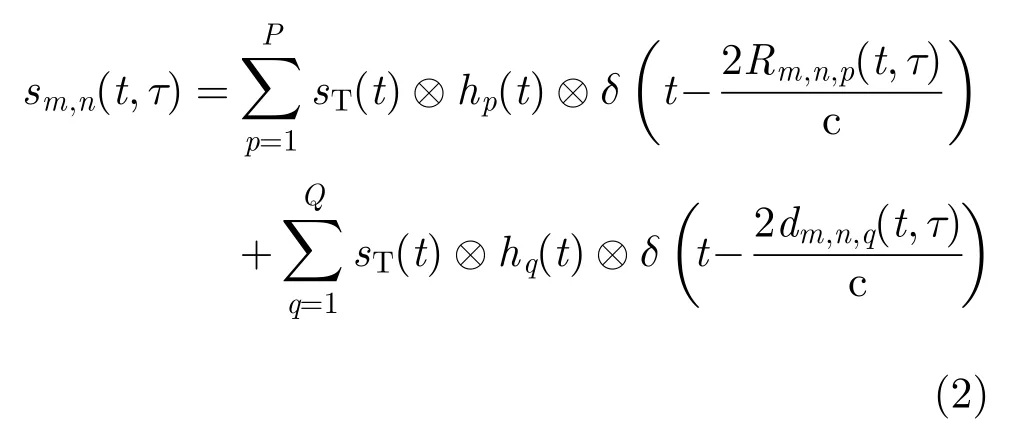
其中,sT(t)为发射信号,P为人体个数,Q为等效的杂波个数,为狄利克莱函数,为卷积算子,hp(t)为生理体征信号的响应,为杂波响应,dm,n,q为杂波到雷达天线之间的距离。
如图1所示,当多个人体目标位置靠近时,距离近端的目标很有可能对距离远端的目标产生遮挡,从而使距离远端的人体目标反射变弱。对于单通道雷达而言,由于只有单个观测视角,多个目标间容易发生遮挡,进而造成漏判。而UWB MIMO生物雷达具有多个虚拟通道,可获取场景的多视角信息。在图1中,第m个发射通道、第n个接收通道难以探测到目标2,但由于空间位置的不同,发射通道m'、接收通道n'获取的回波中目标1对目标2不形成遮挡。因此,UWB MIMO雷达的多视角特性降低了多人体目标之间遮挡效应的影响。

图1 多静止人体目标的UWB MIMO回波模型Fig. 1 UWB MIMO model of multiple stationary humans
若在快时间维用采样间隔δT进行离散采样,每条距离像包含K个采样点,慢时间采样间隔为δT×K,则每个通道的离散信号可表示为一个2维矩阵:

其中k=0,1,...,K-1为距离像采样点,l=0, 1,...,L-1表示慢时间采样点。 hm,n[k,l]为生理体征信号, cm,n[k,l]为杂波,wm,n[k,l]为加性噪声。对具有M个发射天线、N个接收天线的UWB MIMO雷达而言,其等效雷达通道数目为M×N。接收数据S为3维矩阵,分别为快时间、慢时间和等效通道数。
3 多静止人体目标UWB MIMO成像
3.1 预处理
受限于目标材质和障碍物衰减的影响,人体目标散射回波的信号强度远小于环境杂波的强度。直接对接收到的回波进行成像,目标常被掩盖于杂波中,所以必须进行预处理以提高人体生理体征信号的信杂比。静止人体目标的生理体征信号是微动信号,而环境杂波通常是静态杂波,因此增强人体目标生理体征信号的有效方法是变化检测(Change Detection, CD)。背景消除即是一种简单的变化检测方法,其实现过程如式(4)所示,将回波信号在慢时间方向上的平均值作为背景的估计,在回波中减去估计得到的背景回波即可,

其中,L为慢时间帧数。
人体目标的呼吸频率约为0.2~0.3 Hz,身体微动的频率为0.3 Hz以内,在上述频率范围外的频率成分可视为杂波和噪声。本文对去除背景杂波的回波进行低通滤波以抑制杂波和噪声,进一步增强生理体征信号,低通滤波器的截止频率设为0.5 Hz。
3.2 UWB MIMO成像
目前应用较为广泛的MIMO成像算法包括后向投影(Back Projection, BP)等时域成像算法[17],ω-κ等频域成像[18],Capon波束形成器和压缩感知等超分辨成像算法[19],以及衍射层析成像等方法[20]。生物雷达应用场景具有以下特殊性:常处于近场工作条件;受探测场景的限制,天线阵列的分布形式要能够适当做出改变。BP算法的实现过程不存在任何近似,适用于生物雷达成像,因此本文采用BP算法实现静止人体目标UWB MIMO成像。
可以通过式(5)形成BP图像:

BP算法实现的基本过程是以成像区域内的每一个像素点为遍历单位,根据每一个像素点对应的积累曲线找出其在回波矩阵中的回波,相干累加后即为该像素的能量值。
一般地,循环的执行效率要比矩阵运算低,而且多层循环嵌套不利于实现并行优化。为便于并行优化,本文采用了一种基于成像网格投影的BP实现方式。该实现方式是逐条遍历回波将其对于整个图像的“投影”都计算出来,将这一系列投影值相干叠加形成高分辨图像。其具体实现步骤是:
步骤1 将成像区域划分为均匀网格,计算成像网格上每一像素点至收发天线位置的距离,形成距离矩阵;
步骤2 对距离像回波矩阵进行升采样和辐射校正;
步骤3 逐条遍历各虚拟通道接收到的距离像回波,通过插值将该距离像投影至成像网格中,得到该距离线对成像区域的有贡献投影矩阵;
步骤4 对得到的有贡献投影矩阵进行加权,相干累加得到成像结果。
3.3 基于变化检测的人体目标增强成像
人体目标具有一定空间尺寸和形状,在UWB MIMO图像中表现为较大的成像范围及较强的旁瓣,因此邻近人体目标之间存在严重的相互干扰,这也造成了直接从UWB MIMO图像中分辨多静止人体目标是非常困难的。UWB MIMO图像序列反映了场景随时间的变化,积累一定时间内的微动信号可起到提高生理体征信号的强度,抑制人体目标之间相互干扰的作用。
利用式(7)积累生理体征信号的能量:
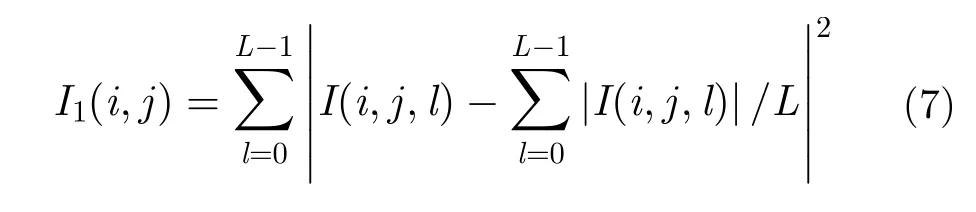
其中,I(i, j, l)为第l帧UWB MIMO图像的像素点(i, j)的幅值,UWB MIMO图像序列中共包含L帧UWB MIMO图像。
式(7)能够有效增强人体的微动生理信号,但也可能显著增强环境中反射较弱的微动干扰,从而形成动态杂波。根据式(8)计算图像慢时间序列的均值能够抑制上述反射较弱的微动干扰,
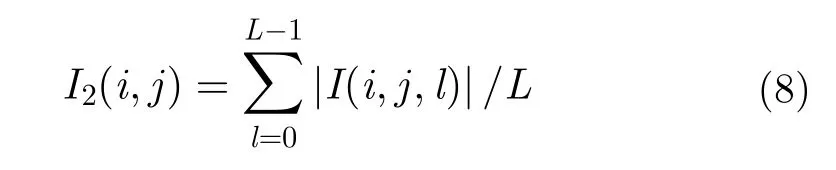
将I1(i, j)作为掩模与图像慢时间序列的均值I2(i, j)相乘,得到最终的多人体目标图像,

4 试验结果分析
第四军医大学生物医学工程学院自1998年开始生物雷达的相关研究工作,成功研制了系列生物雷达。自2015年起,开始研制UWB MIMO生物雷达系统(如图2所示),本文使用的实测数据即由该UWB MIMO生物雷达系统获取。该雷达系统的参数如表1所示,为了同时满足穿透能力和人体探测的需要,该雷达的中心频率约为2200 MHz,带宽达到约4400 MHz。利用该UWB MIMO雷达系统进行穿墙探测试验,砖墙厚度约为30 cm,被测人员站在墙后一定距离处。数据采集过程中,人体保持正常平稳呼吸状态,周围环境无明显动目标的干扰。

图2 UWB MIMO生物雷达系统及探测试验场景Fig. 2 UWB MIMO bio-radar system and experimental scene
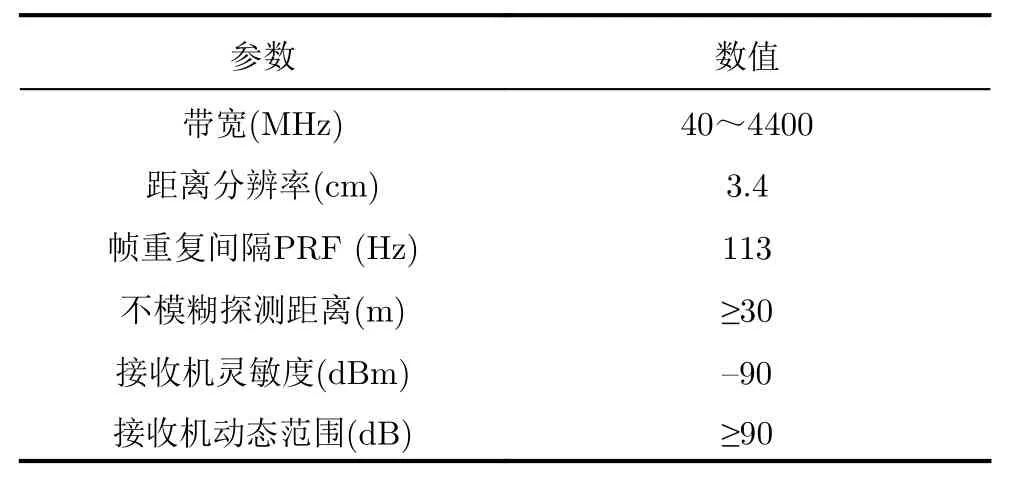
表1 UWB MIMO生物雷达系统参数Tab. 1 Parameters of the UWB MIMO bio-radar
4.1 单静止人体目标成像结果
实验场景如图2所示,在墙后约3 m处站立一静止人体目标,被测人员保持平静呼吸。通过BP算法得到的一帧UWB MIMO图像的结果如图3(a)所示,图中可见明显的方位旁瓣。经过式(7)的处理之后,人体的呼吸生理体征信号得到显著增强,旁瓣等得到了一定抑制,但旁瓣仍存在一定残余(图3(b))。经过式(8)处理得到的均值图像中保留了MIMO图像序列中随时间缓变的成分(图3(c))。人体目标的成像结果如图3(d)所示,旁瓣得到了很好的抑制,人体的生理体征信号得到显著增强。
信杂比(SCR)定义为:
其中,Pt为目标区域χt像素点的平均功率,Pc目标周围杂波区域χc像素点的平均功率,Nt和Nc分别为区域χt和χc中包含的像素点数目。分辨率定义为目标距离向和方位向剖面的3 dB宽度。文中算法性能的定量分析如表2所示。经过本文提出算法的处理之后,分辨率和信噪比等指标都有较大程度的提高。
4.2 多静止人体目标成像结果
多静止人体目标探测的实验场景如图4所示。3个被测人员均正对雷达天线阵列,站立在墙后一定距离处。其中,2个被测目标在墙后3 m的位置,1个被测目标在墙后4 m的位置。数据采集过程中,3个被测目标均保持平稳呼吸状态。
图5为多人体目标成像结果。图5(a)为一帧UWB MIMO数据的BP成像结果,可见除了存在严重的方位向旁瓣之外,多人体目标之间存在严重的干扰(图中方框部分),导致人体目标的信杂比较低。经过本文方法的处理后,人体生理体征信号得到明显增强,可从图像中明显分辨出3个人体目标,为后续的高性能检测与定位提供了基础。
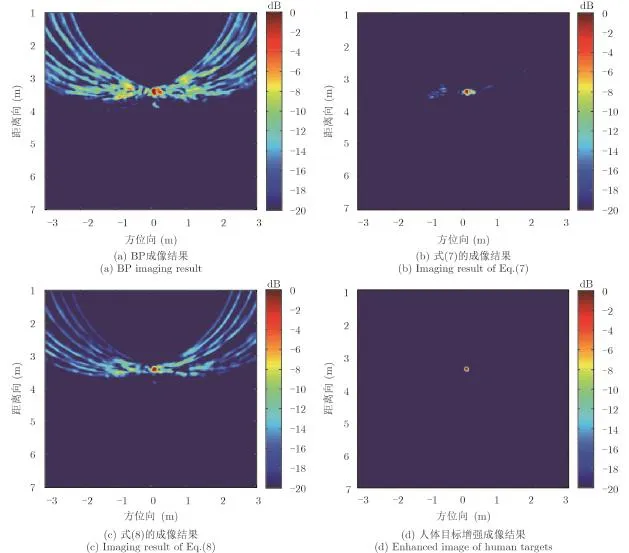
图3 单静止人体目标成像Fig. 3 Results of single stationary person

表2 算法性能定量分析Tab. 2 Performance analysis of the UWB MIMO bio-radar

图4 多静止人体目标试验场景Fig. 4 Experimental scene of multiple stationary persons

图5 多静止人体目标成像Fig. 5 Results of multiple stationary persons
5 结束语
传统单通道生物雷达只能获取场景的单视角信息,难以克服多人体目标间相互干扰的影响。本文采用UWB MIMO生物雷达实现了多人体目标高分辨成像,然后采用UWB MIMO图像序列的变化检测增强生理体征信号,有效抑制了多静止人体目标间的相互干扰。在实测数据结果中,相互靠近的多个人体目标能够清晰分辨,证明本文提出的思路和处理方法是可行的,为进一步提高多静止人体目标的探测性能提供了一条可行的思路。
[1]Li J, Liu L, Zeng Z, et al.. Advanced signal processing for vital sign extraction with applications in UWB radar detection of trapped victims in complex environments[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2013, 7(3): 783–791.
[2]Withington P, Fluhler H, and Nag S. Enhancing homeland security with advanced UWB sensors[J]. IEEE Microwave Magazine, 2003: 51–58.
[3]Chen K, Zhang J, Norman A, et al.. An X-band microwave life-detection systems for searching human subjects under earthquake rubble or behind barrier[J]. IEEE Transactions on Biomedical Engineering, 2000, 47(1): 105–114.
[4]Barnes M A, Nag S, and Payment T. Covert situational awareness with handheld ultra-wideband short pulse radar[C]. Proceedings of SPIE, 2001: 66–77.
[5]Nag S and Barnes M. A moving target detection filter for an ultra-wideband radar[C]. Proceedings of the 2003 IEEE Radar Conference, 2003: 147–153.
[6]Xu Y, Dai S, Wu S, et al.. Vital sign detection method based on multiple higher order cumulant for Ultrawideband radar[J]. IEEE Transactions on Geoscience and Remote Sensing, 2012, 50(4): 1254–1265.
[7]Zhou Q, Liu J H, Host-Madsen A, et al.. Detection of multiple heartbeats using Doppler radar[C]. 2006 IEEE International Conference on Acoustics, Speech, and Signal Processing, 2006, 2: 1160–1163.
[8]Wang Y, Liu Q, and Fathy A E. CW and pulse-Doppler radar processing based on FPGA for human sensing applications[J]. IEEE Transactions on Geoscience and Remote Sensing, 2013, 51(5): 3097–3107.
[9]Liu L B and Liu S X. Remote detection of human vital sign with stepped-frequency continuous wave radar[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2014, 7(3): 775–782.
[10]Takeuchi T, Saito H, Aoki Y, et al.. Measurement of survivor location by using GPR with two dimensional array antenna[C]. 2008 SICE Annual Conference, Chofu, Tokyo, Japan, 2008: 2082–2087.
[11]Lubecke O B, Lubecke V M, Madsen A H, et al.. Doppler radar sensing of multiple subjects in single and multiple antenna systems[C]. International Conference of Telecommunications in Modern Satellite, Cable and Broadcasting Services, Nis, Serbia, 2005: 7–11.
[12]Lv H, Lu G H, Jing X J, et al.. A new ultra-wideband radar for detecting survivors buried under earthquake rubbles[J]. Microwave and Optical Technology Letters, 2010, 52(11): 2621–2624.
[13]Jin T, Lou J, and Zhou Z M. Extraction of landmine features using a forward-looking ground penetrating radar with MIMO Array[J]. IEEE Transactions on Geoscience and Remote Sensing, 2012, 50(10): 4135–4144.
[14]Hunt A R. Use of a frequency-hopping radar for imaging and motion detection through walls[J]. IEEE Transactions on Geoscience and Remote Sensing, 2009, 47(5): 1402–1408.
[15]Hunt A R. A wideband imaging radar for through-the-wall surveillance[J]. Proceedings of the SPIE, 2004, 5403: 590–596.
[16]Hu J, Zhu G, Jin T, et al.. Study on timing Jitter in clutter mitigation of Through-Wall human indication[C]. 2013 IEEE International Conference on Ultra-Wideband (ICUWB), Sydney, Australia, 2013: 211–214.
[17]王怀军, 黄春琳, 陆珉, 等. MIMO雷达反向投影成像算法[J].系统工程与电子技术, 2010, 32(8): 1567–1573. Wang H J, Huang C L, Lu M, et al.. Back projection imaging algorithm for MIMO radar[J]. Systems Engineering and Electronics, 2010, 32(8): 1567–1573.
[18]Cafforio C, Prati C, and Rocca E. SAR data focusing using seismic migration techniques[J]. IEEE Transactions on Aerospace and Electronic Systems, 1991, 27(2): 194–207.
[19]Donoho D L. Compressed sensing[J]. IEEE Transactions on Information Theory, 2006, 52(4): 1289–1306.
[20]Zhang W and Hoorfar A. Three-dimensional real-time through-the-wall radar imaging with diffraction tomographic algorithm[J]. IEEE Transactions on Geoscience and Remote Sensing, 2013, 51(7): 4155–4163.
Imaging of Multiple Stationary Humans Using a UWB MIMO Bio-radar
Liang Fulai①Li Haonan②Qi Fugui①An Qiang①Wang Jianqi①
①(School of Biomedical Engineering, Fourth Military Medical University, Xi’an 710032, China)
②(Cadet Brigade, Fourth Military Medical University, Xi’an 710032, China)
Because of the mutual interference between multiple stationary humans, distinguishing individuals via the range profile of a single-channel bioradar is difficult. To solve this problem, we used an Ultra-WideBand Multiple-Input Multiple-Output (UWB MIMO) bioradar to compose high-resolution two-dimensional images. These images allow multiple stationary humans to be separated from space. Then, vital signs are enhanced on the basis of the UWB MIMO image sequence, thereby leading to effective suppression of interference. The experimental results demonstrate that the proposed method can compose high-resolution images of multiple stationary humans. Thus, high-performance detection and localization of multiple stationary humans can be expected.
Bioradar; Ultra-Wide Band (UWB); Multiple-Input Multiple-Output (MIMO); Imaging
TN95
A
2095-283X(2016)05-0470-07
10.12000/JR16096
梁福来, 李浩楠, 祁富贵, 等. UWB MIMO生物雷达多静止人体目标成像方法研究[J]. 雷达学报, 2016, 5(5): 470–476.
10.12000/JR16096.
Reference format: Liang Fulai, Li Haonan, Qi Fugui, et al.. Imaging of multiple stationary humans using a UWB MIMO bio-radar[J]. Journal of Radars, 2016, 5(5): 470–476. DOI: 10.12000/JR16096.

梁福来(1985–),男,博士,讲师。研究方向为生物雷达信号处理和穿墙成像等。
李浩楠(1996–),男,本科生。研究方向为非接触生理信号检测。
祁富贵(1992–),男,硕士生。研究方向为基于生物雷达的人体运动模式分类。
2016-09-13;改回日期:2016-11-14;
2016-11-22
*通信作者:王健琪 wangjq@fmmu.edu.cn
国家自然科学基金(61327805),国家科技支撑计划(2014BAK12B02),陕西省青年科技新星计划项目(2016KJXX-03)
Foundation Items: National Natural Science Foundation of China (61327805), National Science & Technology Pillar Program (2014BAK12B02), Shanxi Technology Committee (2016KJXX-03)
