车辆碰撞各阶段的运动学分析
2016-12-01辽宁省大连市育明高级中学李文睿
辽宁省大连市育明高级中学 李文睿
车辆碰撞各阶段的运动学分析
辽宁省大连市育明高级中学李文睿
本文结合车辆碰撞中的相关运动学理论及碰撞理论,简要分析各类车辆间碰撞的形态,以汽车碰撞为例,
拆分车辆间碰撞的各个阶段,即碰撞阶段、一维碰撞、二维碰撞以及碰撞后,从四个阶段具体运用运动学定律,如动能定理、动量守恒定律、角动量定理等相关运动学理论,以此构建一定的数学模型,对运动中的车辆进行运动学分析,全面、系统地研究运动学定律在车辆碰撞中的应用。
碰撞 运动学 一维碰撞 二维碰撞
随着我国城市化与工业化进程的加速,人们对汽车的需求日益增大,汽车工业得到迅猛发展。汽车为公众的出行带来极便利的同时,也使交通安全问题增多。交通安全事故频发给交通管理与交通事故认定带来诸多难题。在交通事故的各种类型中,车辆碰撞事故是交通事故中出现率较高的一种。相关人员通过运动学定律可以确定肇事时的车辆状态,为划定肇事双方责任提供依据。
一、车辆碰撞阶段
碰撞阶段指车辆之间发生碰撞并进行动量互换刹那间的时间历程。由于车辆碰撞阶段的车辆加速度很大,车辆受到的碰撞撞击力也很大,车辆在刹那间完成碰撞过程。
对车辆碰撞作用阶段进行运动学分析时,可做如下简化:
1.以汽车碰撞为例,造成车体发生最大形变的车辆碰撞的接触角度位移约为2~5度。实际建立碰撞模型、进行研究时,研究人员可以忽略碰撞作用期间车辆运动位移,从而简化模型。
2.碰撞阶段,运用运动学定律中的动量定理与冲量定理时,研究人员可以忽略不计系统所受的外力,如车轮与地面间的摩擦力、地面制动力等外力给予系统造成的影响。
3.车辆碰撞中,由于一般情况下,碰撞所造成的车辆伤害变形只是车辆的局部部位,所以在车辆碰撞的运动学分析时可以把车辆当作刚体进行简化。车辆碰撞中伴有机械能的损失,以及车辆碰撞阶段碰撞的冲击力在较短时间内急剧变化。
因此,研究人员研究和描述车辆的运动状态时,对车辆碰撞作用阶段的运动力学计算分析不宜用动能定理,而应用动量和动量矩定理。
二、车辆一维碰撞
一维碰撞指车辆的碰撞速度矢量间的夹角小于等于10°的车辆碰撞。典型的汽车一维碰撞有迎面碰撞和追尾碰撞。严格地讲,汽车一维碰撞指汽车碰撞沿汽车纵轴线且车体的变形和运动沿着纵轴方向的碰撞。
1.迎面碰撞
迎面碰撞是汽车碰撞前速度矢量相反的一维碰撞。同型号汽车正面碰撞可与汽车对固定壁碰撞等价。汽车正面碰撞速度小的碰撞为刚体碰撞,碰撞速度大的碰撞为塑性碰撞,一般的正面碰撞遵循弹塑性碰撞规律。刚体碰撞、塑性碰撞以及弹塑性碰撞一定条件下适用于迎面碰撞。
例如,已知事故发生前两冲突车辆的车速分别为v10和v20,引入恢复系数e。由动量守恒定理可以得到:

汽车碰撞的塑性变形与汽车的碰撞速度、结构刚度有关。试验表明,迎面碰撞中汽车的塑性变形与汽车有效碰撞速度有关。
图1是碰撞速度与塑性变形量的关系。用数学式表示为:

图2是轿车碰撞速度与恢复系数的关系。用数字式表示为:

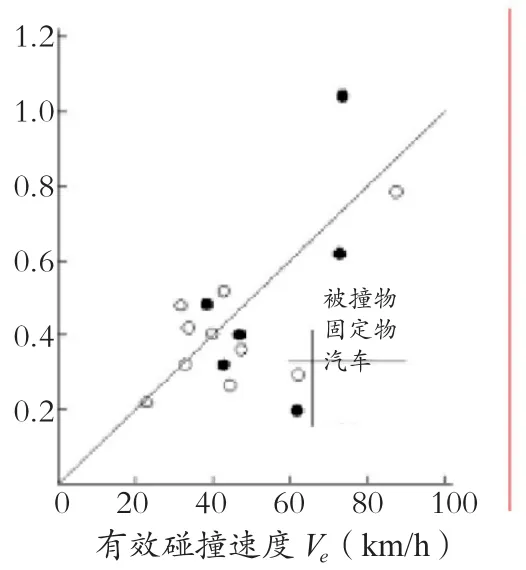
图1 碰撞速度与塑性变形量的关系

图2 碰撞速度与恢复系数的关系
通过公式三和公式四得到:

式中:X表示汽车的变形。
得到恢复系数e以后,研究人员可以根据公式一和公式二确定汽车碰撞后的速度变化,进而求出汽车迎面碰撞能的损失。
以上是基于发动机前置的汽车碰撞建立的模型。因为发动机前置加大了汽车前部刚度。发动机后置,汽车前部刚度会减小。
2.追尾碰撞
汽车追尾碰撞是汽车碰撞前速度方向一致的一维碰撞。它有如下特点:
(1)被碰撞车辆认知的时间很晚,很少有回避操作行为。碰撞车驾驶员发现有尾撞发生的可能时,必定要采取紧急制动措施,在路面上留下较明显的制动印迹(与车型和操作有关)。被碰撞车辆通常不会采取制动措施。
(2)恢复系数比正面碰撞小得多。因为汽车前部装有发动机,刚度高,车身后部(轿车)主要是空腔,刚度低。尾撞变形主要是被撞车的后部,故恢复系数比正面碰撞小得多。
当有效碰撞速度达到20km/h以上时,恢复系数近似为零。这种情况下,碰撞后两车粘成一体运动。碰撞车停止后,有时被撞车还会继续向前滚动一段距离。因汽车追尾碰撞后两车共同运动,则:

式中:汽车1是追尾汽车;汽车2是被追尾汽车。
碰撞后,追尾汽车以vc为初速度,在制动状态下作滑移运动。
根据能量守恒定理,滑移运动阶段车轮与路面摩擦消耗尽汽车的动能。则有:

式中:μ1表示追尾汽车滑移摩擦系数;l1表示汽车1的滑移距离;k1表示制动情况修正系数。当汽车全轮制动时,k1取1,只有前轮或后轮制动时k 1按汽车动态轴荷确定。
对被追尾汽车,有:

式中:f2表示被追尾汽车的滚动摩擦系数;l2表示被追尾汽车滚动距离。
通过公式七和公式八,得到追尾碰撞后两车的初始速度为:因为追尾碰撞属于塑性碰撞,追尾碰撞能损失为:


已知被追尾汽车尾部刚度C2,尾部变形面积S2,则追尾碰撞能损失为C2·S2,则有:

通过公式九和公式十一,可得到v10、v20。
试验表明,同型号追尾碰撞的追尾汽车存在关系:

式中:v2e表示被追尾汽车的有效碰撞速度,v2e=v20-vc。
通过公式九和公式十二,即可得到v10和v20。
三、车辆二维碰撞
车辆二维碰撞指车辆碰撞后作非一维的平面运动的碰撞类型。车辆二维碰撞模型的前提假设为:
车体仅有纵向、横向平动和绕z轴的横摆运动三个自由度;汽车碰撞与路面在同一平面;仅考虑车体间惯性碰撞力的作用,忽略其他外力,碰撞遵循动量守恒;碰撞过程极短,是瞬时完成的,忽略时间的影响;车体为有质量的刚体,不考虑碰撞变形;车体运动的约束条件由汽车的切向和法向恢复系数描述;碰撞前后,汽车质量分布和几何结构参数不变;汽车合冲量作用在汽车碰撞中心。
汽车交通事故中的车与车碰撞,多数属于二维碰撞。碰撞前后两车的位置需要平面坐标系的(x,y)坐标和汽车偏转角来确定。对单一车辆来说,碰撞后的位置往往不在原来的速度方向上,而且伴有角度的变化(旋转)。二维碰撞可以有两种不同的分类方法。
一种方法是根据两车速度的方向以及是否对心,可将二维碰撞分为非对心碰撞、对心斜角碰撞、对心直角侧碰撞、非对心直角侧碰撞、非对心斜角侧碰撞等。这种分类法找不到内在规律,每一种类别在进行事故分析的时候,所需要的参数都有所不同,而且应用了许多经验公式,得不到普遍适用的表达式。事故处理的实际过程中,研究人员对其进行应用有一定的难度。
另外一种方法是按照受力的特点和复杂程度,将二维碰撞分为四类:忽略转动的二维碰撞,绕碰撞点转动的二维碰撞,一般的二维点碰撞,一般的二维面碰撞。
前两种碰撞分析过程简单、参数较少且计算简便,但其特征与多数的汽车碰撞特征相差较大。后两种碰撞具有一定的普遍性。本文针对一般的二维点碰撞和一般的二维面碰撞推导了下面的碰撞模型。
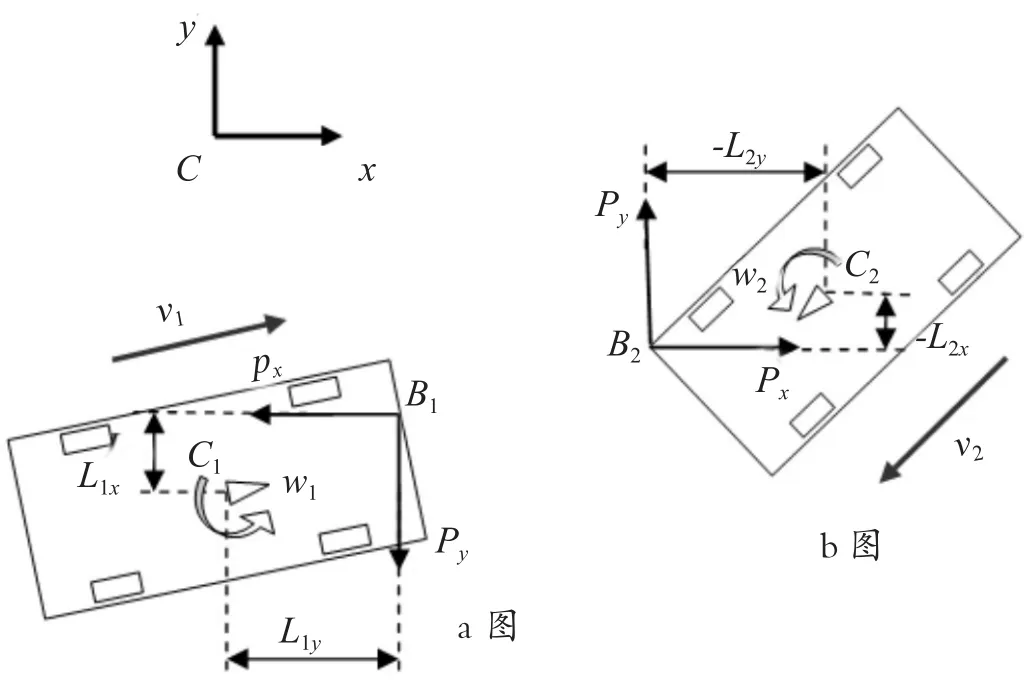
图3 二维碰撞模型
图3表示车辆1和车辆2在任意一点B相碰撞,为明确表示碰撞冲量xP和yP,分别对两车的作用方向进行研究,如图a和图b所示。
直角坐标(x,y)分别以质心C为原点,碰撞点B1相对车1质心C1的坐标为L1x和 L1y,相对车2质心C2的坐标为 L2x和L2y。图b中L2x和L2y前加负号,是因为图中B2点在相对坐标原点C2的左下方,相对于C2的(x,y)坐标均为负值,这样做可以使所推导的公式适用于任意情况。
两车的质量分别是m1和m2,两车绕各自质心的转动惯量分别为J1和J2,两车碰撞前后的转动角速度分别为ω10、ω1和ω20、ω2,两车碰撞前后质心的运动速度分别为v10、v1和v20、v2,它们在x、y轴上的投影分别为 v10x、v10y、v1x、v1y和v20x、v20y、v2x、v2y。
两汽车在B点碰撞时存在相对滑动和弹性恢复。为使事故分析更加接近交通事故的实际情况,研究人员可以引入运动学相关参数:法向力弹性恢复系数和切向力滑动摩擦系数。
法向力弹性恢复系数为:

式中:vrn表示碰撞后,在碰撞点处两车公法线方向的相对速度;vron表示碰撞前,在碰撞点处两车公法线方向的相对速度。
两车碰撞为完全弹性碰撞时,k值取0;两车碰撞为完全塑性碰撞时,k值取1;
两车碰撞为弹塑性碰撞时,k=0~1。
切向力滑动摩擦系数为:

式中: Px表示碰撞点处x轴方向的碰撞冲量;Py表示碰撞点处y轴方向的碰撞冲量。
若汽车受撞击时受到的x、y轴方向的碰撞冲量符号相同,则µ取正值;受到的x、y轴方向的碰撞冲量符号相反,则µ取负值。
根据动量定理和冲量矩定理,二维碰撞能损失为:

通常车辆在碰撞过程中的接触并非只有一点,而是以面碰撞为普遍形式。由于车辆构造的缘故,碰撞面上各点的刚度并不相同。因而,在碰撞面上由于车辆的法向力不通过碰撞面中心,而形成作用力偶和反作用力偶。
通过对二维面碰撞的研究发现,二维面碰撞的求解过程完全可用二维点碰撞解决,其碰撞过程中的冲力偶可利用平移碰撞点的办法达到同样效果,这样就实现了二维点碰撞在求解车辆碰撞过程中的普遍性。
四、车辆碰撞后
碰撞后阶段指汽车碰撞后,从碰撞车体分离直到汽车运动停止的过程。汽车碰撞前的状态和碰撞性质直接影响汽车碰撞后的运动。因此,研究人员分析汽车碰撞后的运动应考虑汽车碰撞前状态和碰撞性质。
汽车正面相撞时,由于两车在同一直线上运动,碰撞中不产生回转力矩,所以碰撞后两车的停止位置一般和原先的行驶方向偏离不大,但由于冲量的不同将使冲量小的车从碰撞位置后移。
汽车追尾相撞,由于能量的交换,后车促使前车加速,两车一起沿原行驶路线向前运动。侧面冲突中,无论是正交或斜交相撞,都会使冲突双方不同程度地偏离原行驶路线,滑移和回转同时存在。
车辆运动轨迹取决于碰撞冲量、撞击部位、车辆结果及质量分布、操纵系状态(车轮制动情况、转向轮偏转角度)、路面坡度和附着系数等。由于汽车的损坏仅限于相撞部位,研究人员可按刚体运动规律分析汽车碰撞后运动轨迹。
根据汽车碰撞前驾驶员可能采取的措施,汽车碰撞后会出现以下几种状态:车轮制动抱死未转向,车轮制动抱死转向,车轮未制动未转向,车轮未制动转向。
汽车行驶过程中,车轮受到侧向力作用出现侧偏现象,车轮侧偏会影响汽车行驶方向。车轮所受侧偏力较大时,车轮与接地区域发生部分侧滑。当侧向力达到侧向附着极限时,整个车轮侧滑。综合以上分析,可认为汽车碰撞后的运动受汽车制动情况、转向情况以及车轮侧偏特性影响。
汽车碰撞后运动过程中具体涉及的运动学定律包括以下几方面内容:
1.当汽车处于制动状态时,汽车碰撞后运动不随转向轮转角变化,车轮摩擦力的方向与该车轮速度方向相反,摩擦力大小与该车轮负荷成正比。
2.当汽车处于未制动状态时,汽车碰撞后运动过程可分为两阶段。第一阶段为汽车的平面滑移运动阶段。碰撞刚结束时,当车轮平面与车轮滑移速度方向间夹角较大时,车轮不能自由转动,通常只产生滑移运动,随着运动过程的继续,该夹角减小。车轮摩擦力方向与车轮平面垂直,摩擦力方向与该车轮滑移速度方向相反。第二阶段为汽车的滚动运动阶段。在汽车平面滑移运动阶段,当车轮平面与其滑移速度方向间夹角减小到一定程度时,汽车从平面滑移运动阶段过渡到滚动运动阶段。
通过以上分析,笔者希望本文能为研究人员处理交通事故提供一些参考。Normal and Tangential Restitution coefficient[J].SAE 940564,1994
[7]Hirotoshi lshikawa.Impact Center and Accident Restitution coefficient for Accident Reconstruction[J].SAE 930654,1993
[8]陶 沙,于长吉.汽车安全行驶与事故分析[M].大连:大连理工大学出版社,1997
[9]许洪国.道路交通事故分析与再现[M].北京:警官教育出版社,2000
[10]裴剑平,吴卫东.交通事故再现碰撞模型综述[J].交通运输工程学报,2001
[11]雷正保,钟志华.汽车碰撞仿真研究仿真趋势[J].长沙交通学院学报,1999
[12]Bruno F.Sehmidt,W.R.Haight,ThomaS J.Szabo,Judson B.Weleher.System-based Energy and Momentum Analysis of Collision[J].SAE 980026,1998
[13]胡远志,李一兵,张 伟.交通事故再现中汽车轮迹的建模验模[J].计算机仿真,2003
[1]阳兆祥.交通事故力学鉴定教程[M].南宁:广西科学技术出版社,2002
[2]许洪国.交通事故分析与处理[M].北京:人民交通出版社,2003
[3]江守一郎.汽车事故工程[M].北京:人民交通出版社,1987
[4]邱英亮.汽车碰撞事故模拟再现的研究及应用[D].吉林大学,2009
[5]Terry D.Day,Randall L.Hargens.Further Validation of EDSMAC using the RICSAC Staged Collisions[J].SAE 900102,1990
[6] Hirotoshi lshikawa.Impact Model for Accident Reconstruction
ISSN2095-6711/Z01-2016-08-0202
李文睿(1999—),女,辽宁大连人,大连市育明高级中学高三十一班学生