PMSM滑模观测器无位置传感器控制研究
2016-11-30张刚,陈波
张 刚,陈 波
(1.江苏建筑职业技术学院,徐州 221116;2.江苏建筑节能与建造技术协同创新中心,徐州 221116;3.大连大学,大连 116622)
PMSM滑模观测器无位置传感器控制研究
张 刚1,2,陈 波3
(1.江苏建筑职业技术学院,徐州 221116;2.江苏建筑节能与建造技术协同创新中心,徐州 221116;3.大连大学,大连 116622)
永磁同步电机(PMSM)以其高效、大转矩输出而得到了广泛应用。现有永磁同步电机驱动系统调速多采用位置传感器获取转子位置以及速度信号,使得驱动调速控制系统成本增加,同时系统的可靠性也有所降低。针对此不足,研究了永磁同步电机的无位置传感器控制,深入分析并设计了基于改进滑模观测器的永磁同步电机矢量控制系统,通过引入锁相环技术解决了系统抖动问题,基于MATLAB搭建了系统仿真模型。最后以TMS320F2812 DSP控制芯片为核心,搭建了实验测试平台,通过控制一台1 kW表贴式永磁同步电机,实现了永磁同步电机的无位置传感器滑模观测器控制,验证了所提出方法的正确性。
电机调速;滑模观测器;永磁同步电机;无位置控制
0 引 言
近年,随着高性能稀土永磁制造、加工工艺的发展,永磁同步电机(以下简称PMSM)性能得以较大提升,并且较传统电励磁电机相比,其结构简单、高效、性能可靠,在工业、生活等多个领域得到大力发展。与此同时,随着高性能电力电子器件以及新型控制控制方法的提出,电机驱动技术也得到快速发展[1-2]。现有PMSM驱动控制系统中,电机驱动多基于转子位置和速度信号,而这些信号的获取多基于机械式传感器(如编码器)等对电机运行数据的采集。由此存在两个问题:第一,传感器的存在会影响电机的控制精度,尤其当PMSM工作于恶劣环境下时传感器自身精度会大大降低;第二,传感器的使用增加了控制系统的成本,无形中也使得电机的尺寸有所增大[3]。无位置传感器则能够克服以上问题,因此基于无位置传感器的PMSM控制技术一经提出就得到了广大学者关注,其采用较为简单的检测电机电压/电流信号,通过坐标变换、算法设计等一系列过程来估算出电机的转子位置和速度信号,从而替代传统机械式检测部件,最终实现电机的有效控制[4]。与前者相比,无位置传感器控制有着高效、低成本的显著优点,对其研究已成为交流调速驱动领域的一个重要研究方向,在电力拖动、电机调速等应用场合有着较好的应用前景[5]。
PMSM无位置传感器控制系统性能优劣取决于控制方案的合理性以及位置估算环节的精确性,而电机位置估算环节策略主要以全阶观测器、扩展卡尔曼滤波器、降阶观测器和滑模观测器等为代表,这些观测器实质上为系统的状态重构[6-7]。其中,滑模观测器控制是一种非线性控制方法,其本质是一种有间断的开关控制,与其所控制的对象参数变化及扰动无关,因此特别适用于PMSM这样一个多场耦合、多变量的非线性系统[8]。PMSM滑模观测器无位置控制多采用不同的切换状态以此抵消系统的不确定性,现有研究对于PMSM控制系统系统的抖震问题尚没有较好解决[9]。
本文从分析PMSM无位置传感器控制工作原理入手,深入分析并设计了基于改进滑模观测器的永磁同步电机矢量控制系统。通过引入锁相环技术解决了系统抖动问题,基于MATLAB搭建了相应的仿真系统模型,最后以DSP控制器为核心,搭建了实验平台,通过控制一台1 kW表贴式PMSM进行了实验验证。
1 PMSM无位置传感器观测原理
1.1 PMSM数学模型
PMSM的数学模型一般由电压、磁链以及转矩三个方程组成。在建立电机数学模型之前,作如下假设:
1) 忽略铁心中的涡流以及磁滞损耗;
2) 定子通三相对称正弦交流电;
3) 转子上无阻尼绕组;
4) 转子永磁电导率为零。
基于以上假设,采用坐标变换后,可以得到PMSM在d,q坐标系下的基本方程:
电压方程:
(1)
式中:ud,uq为d,q轴电压;ψd,ψq为d,q轴磁链。
磁链方程:
(2)
电磁转矩方程:
(3)
从式(3)可以看出,转矩方程由两部分组成。第一部分为电机的磁阻转矩,此部分主要由转子凸极效应引起;第二部分为电机的电磁转矩,主要由永磁体励磁磁场与定子电流相互作用产生的。本文采用传统的转子表贴式PMSM,其交轴、直轴电感相等,即Ld=Lq,故不存在磁阻转矩。转矩方程可简写为如下形式:
(4)
由电磁转矩方程可以看出,PMSM的矢量控制最终归结为对d轴和q轴电流的控制,其关键是如何实现高性能的瞬时转矩控制。此外,当采用id=0的矢量控制时iq和ψf两者正交,每单位定子电流产生的转矩值最大,从而可以获得快速的转矩响应。
1.2PMSM矢量控制系统
现有PMSM控制方法中,矢量控制是一种较为常用的方法,其通过控制电枢绕组电流来实现电机转矩性能改善目的。然而,实际上定子侧电流在空间上以同步速旋转,控制改变该交流量异常困难。为此,需通过坐标变换把多个静止坐标系下物理量变换到旋转同步坐标系来。由此可见,矢量控制基本思想将直流电机的控制方法引入到交流电机控制时,将合成的三相定子电流进行矢量分解,形成两个正交且互不影响的磁通的励磁电流分量和转矩电流分量,即id和iq。对此分量进行调节,使得id和iq跟踪指令值,实现电动机转速和转矩的控制。
当采用id=0控制时,通过对d-q轴电流的解耦,使定子电流中只有交轴分量产生电磁转矩。由于没有直轴电流,故电机中不会出现直轴电枢反应和去磁效应,磁阻转矩为零。该控制方法简单易行,本文也采用id=0控制方法,重点研究其加入滑模观测器后的设计。对于该控制方法来说,实现PWM信号的调制主要有正弦脉宽调制(SPWM)和空间电压矢量控制(SVPWM)两种方法。SPWM控制方法特点在于保持逆变器输出接近正弦波电压,而对于电流波形则没有过多考虑。然而当PMSM定子绕组施加交流电流时产生的旋转磁场,从而带动转子同步旋转。SVPWM方法则是围绕把逆变器和电机视为一体机构,重点解决如何产生圆形磁场,并通过跟踪该圆形磁场以控制电压,即采用“磁链跟踪控制”,此方法的直流侧电压利用率控制效果更加理想。
2 滑模观测器设计
2.1SMO控制理论基础分析
SMO变结构控制作为一种特殊的非线性控制方法,以其多参数变化、较强的鲁棒性而在解决不确定的非线性系统控制问题上有着较好表现[10]。其通过开关的切换,选择状态空间中的切换面s(x)=0,两侧采取不同结构,从而实现系统的滑动模态。当进入滑动的模态之后,系统对结构内部参数变化以及外部因素变化不敏感,非常适用于PMSM这样一个多场耦合系统。
设计滑模变结构控制系统基本可以分为两步,其一是滑模面以外的运动,即相平面空间中任意位置运动点正在朝滑模面运动,此时有s(x)≠0;其二是滑模面内的运动,运动点到达滑模面以后进行滑模运动,此时s(x)=0。滑模控制器的设计即针对系统的这两个运动部分,根据切换函数和控制函数,滑模控制系统便可真正建立起来。其具体设计步骤如下:
1) 确定切换函数s(x)
切换函数s(x)即切换开关面,开关面代表了系统的理想动态特性,使它所确定的滑动模态趋于渐近稳定。在输入唯一的情况下,切换函数设计:
(5)
式中:xi=x(i-1)(i=1,2,...,n)为系统的状态及各阶的导数。
2) 控制函数u(x)
设计u(x)使趋近运动满足到达初始条件,并且在合理较短时间内保持较小抖阵到达开关面。目前对于控制函数的设计有常值切换、比例切换以及函数切换控制等几种方法[11],其中函数切换控制方法以其响应较快、控制效果好而得到较多研究,本文即采用此种控制方法。
2.2 基于锁相环的改进SMO估计方法
由于在滑模观测器中估计转子位置时用到了反正切函数,在数字化实现时需要反复查询反正切数值表,从而产生计算噪声。同时,由于在滑动模态下滑模控制存在高频抖动,反正切函数在将抖动引入到除法运算中导致高频抖动产生误差被放大,最终造成角度估算有较大误差。传统SMO设计在PMSM控制开关关断导通时存在较为严重的抖动问题,本文在常规滑模观测器的基础上作了改进,添加了PLL控制,提出一种利用PLL技术的改进滑模观测器观测方法,如图1所示,可以提高估计转子位置和速度的精度。具体来说,PLL技术是基于高精度的相位跟踪原理实现的,它通过调节角度误差Δθ来调节估计转速,最终使估计转速与实际转速一致。这种方法由于采用了PLL调节器,提高了系统估计精度,并能获得良好的动态性能。
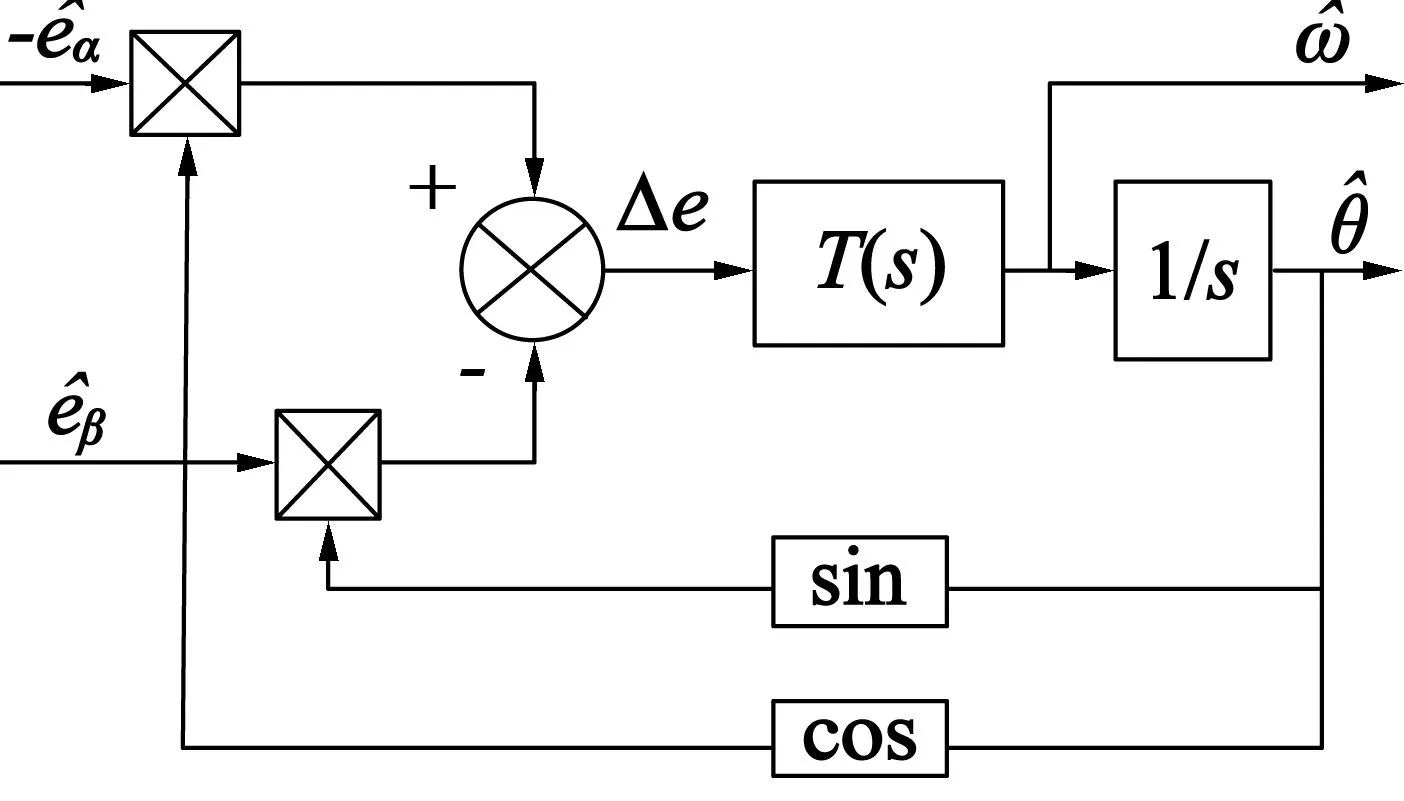
图1 基于锁相环控制的改进滑模观测器设计
此时锁相环系统的等效传函框图如图2所示。
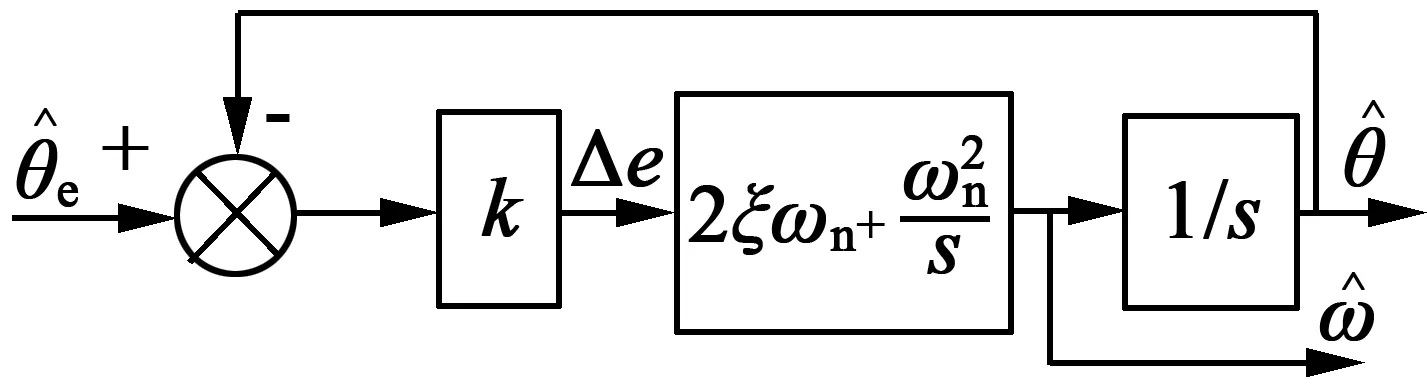
图2 包含锁相环系统的传函等效框图
可以得到其闭环传递函数和估算位置的误差传递函数分别:
(7)
当电机稳态运行时,锁相环系统输入函数为斜坡函数,电机转速基本维持为恒值。根据自动控制相关原理,当输入为斜坡函数时,该锁相环传递系统的稳态误差可表示:
(8)
从式(8)可以看出,当系统处于稳定状态时,锁相环系统可以精确提取转子位置和速度信号。
2.3 系统离散化实现
将上述连续系统离散化,离散化后滑模电流观测器和估计反电势表达式如下:
电流观测器方程:
(9)
其数字化实现方程:
(10)
电流观测器的输出经过控制器可以得到估计的反电势,此时含有较大的谐波分量,需要经过低通滤波器的滤波,用如下方程表示:
(11)
将其离散化,其数字化实现方程:
(12)
式中:fr为滤波器的截止频率。
3 基于改进SMO的PMSM无传感器控制模型
在常规SMO的基础上,利用锁相环技术对位置和转速的估计进行改进,系统总体仿真框图如图3所示。
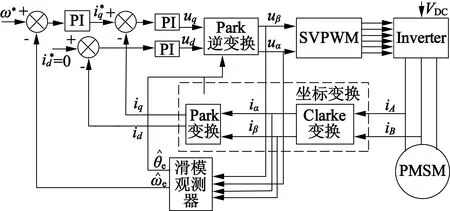
图3 基于滑模观测器的PMSM的id=0控制系统
图3的仿真系统中PMSM主要参数基于实验电机铭牌参数,具体如表1所示。
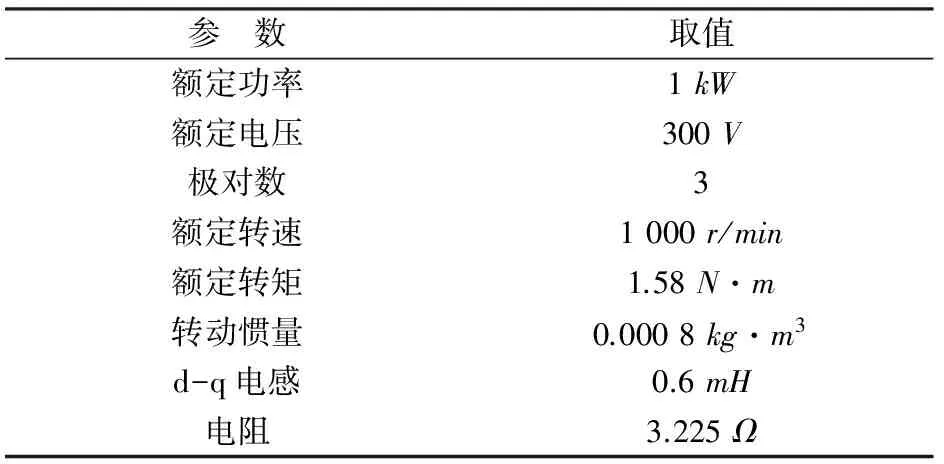
表1 PSMSM电机基本参数
图4为采用锁相环技术估计的转子位置和实际位置仿真波形图。
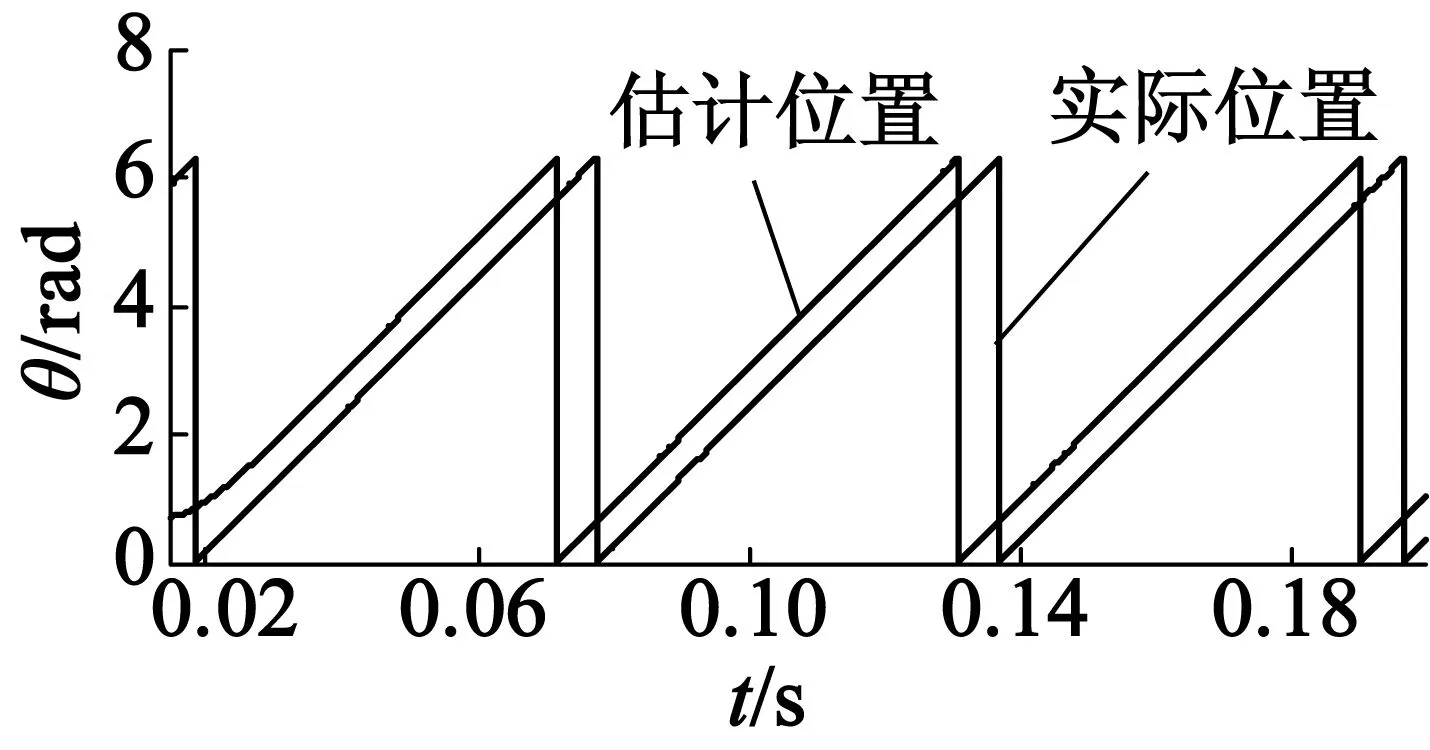
图4 改进SMO位置仿真波形
由图4可以看出,估计位置能够很好地跟踪实际位置,两者之间误差很小,且追踪较为平稳。
图5为估计位置和实际位置误差波形图,给出了误差局部放大图。
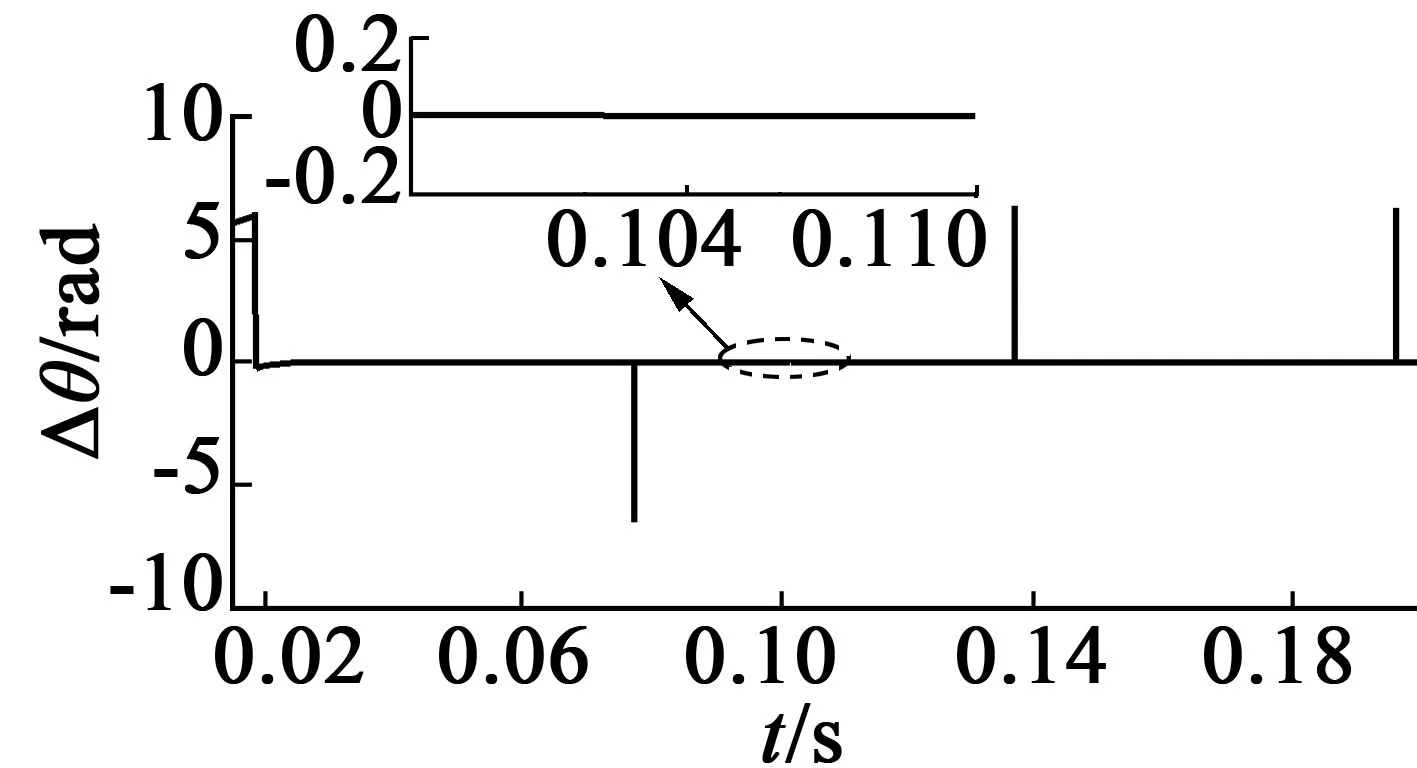
图5 改进SMO位置估计误差波形图
由图5可以,看出采用锁相环技术改进的SMO估计的转子位置精度较高、误差更小,更适合于高性能的电机控制。
图6为采用锁相环技术估计的转速和实际转速波形图。
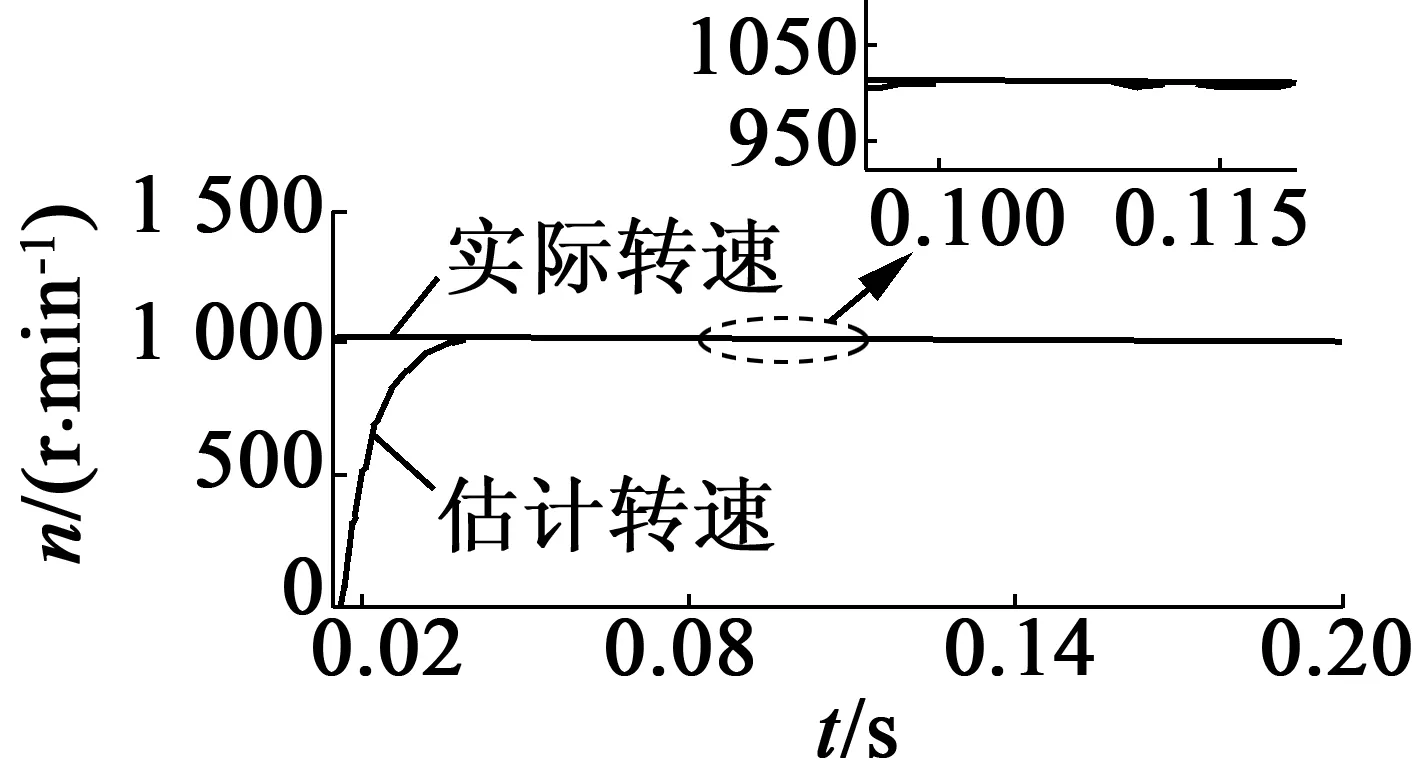
图6 改进SMO转速波形图
由图6可以看出,当电机稳态运行时,采用PLL技术后估计的速度误差小,转速曲线更加平滑,从而使得系统具有更高的估计精度。
4 实验论证
本系统实验平台主要包括三部分:1kW交流三相表贴式PMSM,MATLAB系统仿真时所采用参数与其一致;以TMS320F2812DSP控制器为核心的控制电路板;驱动电路板。整个系统软、硬件及电机实验测试平台如图7所示。
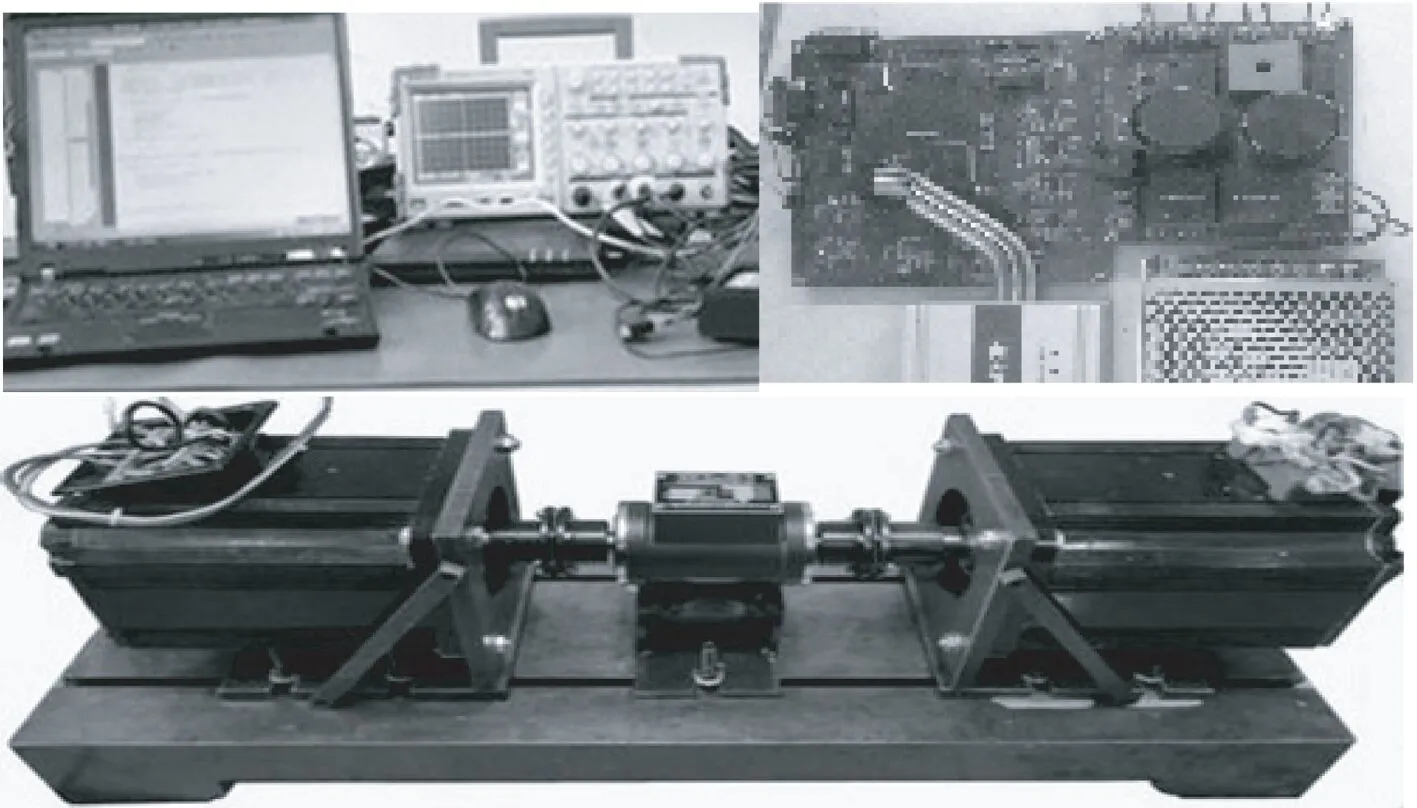
图7 PMSM无位置传感器控制测试平台
为了检验所提出无位置传感器控制方法的可行性及效果,基于所构建的实验平台,分别进行了开环起动实验和基于滑模观测器的PMSM矢量控制试验。其中相电流波形等模拟信号通过示波器直接提取,滑模观测器估计的反电势、电流、转子位置和速度相关信号波形可通过CCS软件获取。图8为滑模观测器估计的电机反电势波形图。
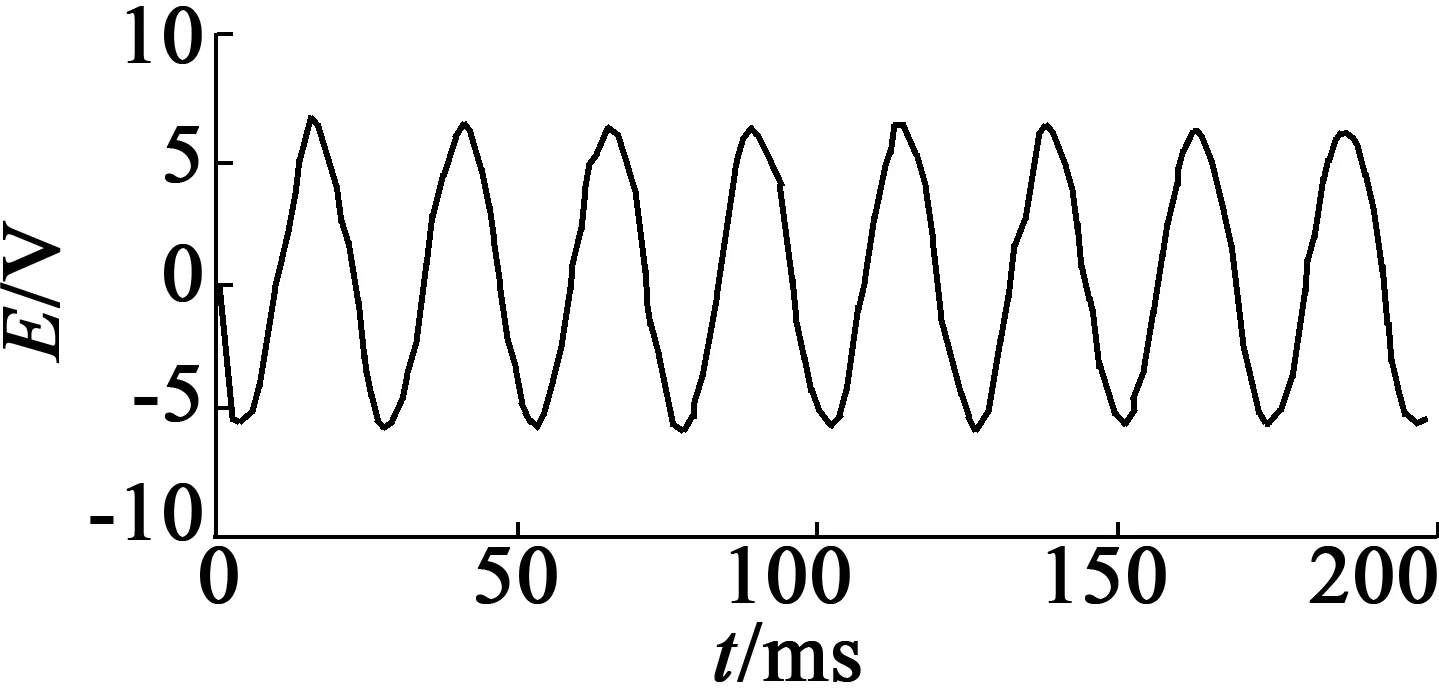
图8 SMO估计α轴反电势波形
由图8可以看出,经过滤波器滤波以后,波形曲线平滑,正弦畸变和高频噪声都比较小,因此非常有利于转子位置和速度信号的正确估计。
图9为转子位置波形,其中实际位置信号是利用复合式光电编码器得到。
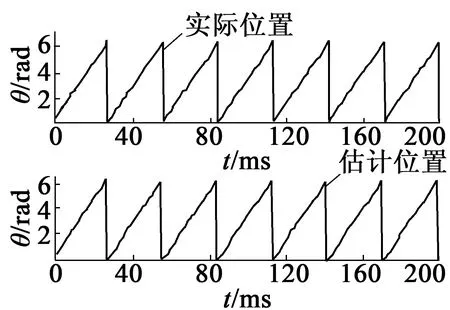
图9 实际转子位置与SMO估计位置波形
由图9可以看出,实际位置与估计位置波形相似度非常高,两者在时间和幅值上差别非常小。
图10给出了估计位置和实际位置的误差信号波形图。
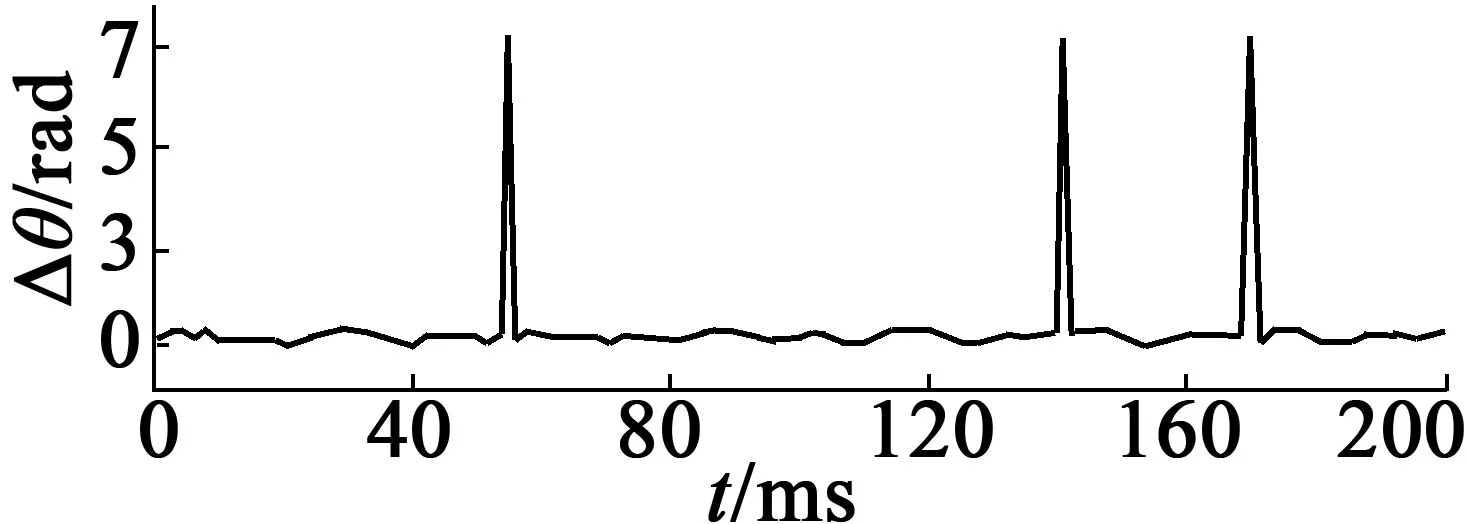
图10 SMO估计位置误差波形
由图10可以看出,当电机在中高速区域稳定运行时,其估计位置误差较小,滑模观测器估计的转子位置和实际位置基本一致。
图11为电机转速波形图,电机实际转速是通过编码器获取的位置信号计算得到。
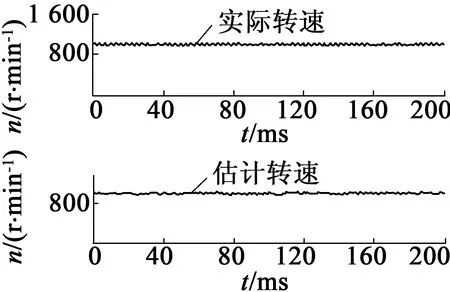
图11 实际转速与SMO估计转速波形
由图11可以看出,电机稳态运行时估计的转速能很好地跟踪实际转速,两者波形近似重合,且估计转速波形平稳,证明系统抖动较小,验证了所提出方法的正确性。
5 结 语
在对PMSM无位置传感器控制原理及滑模控制器深入分析基础上,提出了基于锁相环技术的改进滑模观测器PMSM无位置传感器控制方法,搭建了系统仿真模型并进行了仿真。最后基于一台1kW三相正弦波驱动表贴式PMSM为控制对象,以数字信号处理器TMS320F2812为核心,设计开发了无位置传感器PMSM控制系统的硬件电路,编写了基于PLL的改进SMO的PMSM控制系统程序,完成了对上述设计、分析与仿真,并进行了实验验证,通过滑模观测器估计位置与实测位置、转速波形与实测转速波形等比较,验证了上述分析和设计的正确性,表明了所提出方法的正确性和有效性,对进一步研究PMSM无位置传感器控制及其应用方面有一定参考性。
[1] 唐任远.现代永磁电机理论与设计[M].北京:机械工业出版社,1997.
[2] 李永东.交流电机数字控制系统[M].北京:机械工业出版社,2002.
[3] 李林杰,焦振宏,时建欣.有位置和无位置传感器对转电动机调速控制系统[J].微特电机,2010,38(12):38-40.
[4] 姜卫东,赵勇,邢栋,等.外转子无刷直流电动机无位置传感控制技术研究[J].微特电机,2012,40(5):45-47.
[5] 刘仕钊,李声晋,卢刚,等.基于SMO的无位置传感器PMSM空间矢量控制研究[J].微特电机,2010,10:39-40.
[6] 薛树功,魏利胜,凌有铸.基于扩展卡尔曼滤波的永磁同步电机无传感器矢量控制[J].电机与控制应用,2011,38(8):15-18.
[7] 贾洪平,孙丹,贺益康.基于滑模变结构的永磁同步电机直接转矩控制[J].中国电机工程学报,2006,26(20):134-138.
[8] 年珩,贺益康,黄雷.永磁同步电机无位置传感器运行场路耦合分析[J].中国电机工程学报,2008,28(18):24-27.
[9]LAICK,KUOKS.Anovelmotordrivedesignforincrementalmotionsystemviasliding-modecontrolmethod[J].IEEETrans.onIndustrialElectronics,2005,52(2):499-507.
[10] 尚喆,赵荣祥,窦汝振.基于自适应滑模观测器的永磁同步电机无位置传感器控制研究[J].中国电机工程学报,2007,27(3):23-27.
[11] 王冉珺,刘恩海.永磁同步电机转子初始位置的检测方法[J].电机与控制学报,2012,16(1):63-65.
Research on PMSM Position Sensorless Control Based on Sliding Mode Observer
ZHANG Gang1,2, CHEN Bo3
(1.Jiangsu Jianzhu Institute,Xuzhou 221116,China;2.Jiangsu Collaborative Innovation Center for Building Enery Saving and Construction Technology,Xuzhou 221116,China; 3.Dalian University,Dalian 116622,China)
Permanent magnet synchronous machine (PMSM) has been broadly acknowledged in kinds of industrial applications due to its high efficiency and large output torque. The signals of rotor position and velocity of existing PMSM drive system are obtained through the utilization of position sensors, which increases the costs of the drive system while reducing the system reliability. To overcome this disadvantage, PMSM sensorless control was studied in this paper, and one improved PMSM vector control method was proposed based on sliding mode observer. Phase-locked loop (PLL) was introduced to avoid the systemic jitter problem, and then the whole simulation system was established based on MATLAB. Finally, an experimental platform based on TMS320F2812 DSP control chip was built to test the correctness of the proposed method through the control of one 1 kW surface PMSM. The test results reveal that the proposed improved SMO method based on PLL can achieve the observations of position and speed simultaneously, which verifies the correctness and the of accuracy of proposed method.
machine speed adjustable; sliding mode obverse (SMO); permanent magnet synchronous machine (PMSM); position sensorless control
宋洋(1982-),男,工程师, 研究方向为电力系统运维及电机控制等。
2015-12-15
江苏建筑节能与建造技术协同创新中心开放基金项目(SJXTQ1503);江苏省建设系统科技项目(201507060003)
TM341;TM351
A
1004-7018(2016)02-0054-04