形状记忆合金丝驱动的仿生双尾鳍推进器的仿真和实验研究
2016-11-26王荣臻王振龙
李 健,王荣臻,吴 季,高 飞,王振龙
(1.东北林业大学,哈尔滨 150040;2.北京军区建筑设计院,北京 100042;3.哈尔滨工业大学,哈尔滨 150001)
形状记忆合金丝驱动的仿生双尾鳍推进器的仿真和实验研究
李 健1,王荣臻2,吴 季1,高 飞3,王振龙3
(1.东北林业大学,哈尔滨 150040;2.北京军区建筑设计院,北京 100042;3.哈尔滨工业大学,哈尔滨 150001)
单尾鳍推进的仿生鱼会产生周期性的、较大幅度的侧向力,使得鱼体产生横向振荡和偏摆,不利于游动的稳定性。为了消除侧向力的影响,提出一种双尾鳍摆动推进的策略,通过双尾鳍的对称摆动来抵消摆动时产生的侧向力。研制了形状记忆合金丝驱动的仿生双尾鳍推进器,并通过仿真和实验的方法对双尾鳍的推进性能进行分析。
形状记忆合金丝;仿生双尾鳍推进器;仿真;实验研究
0 引 言
鱼类是最常见的海洋生物,其中依靠尾鳍推进模式的鱼类又占了大多数,其优势体现在游动的快速性和高效性,目前,国内外研制的仿生机器鱼大多模拟这种类型的推进模式。然而当前的仿生机器鱼大多采用电机作为驱动元件,存在结构复杂、尺寸大、动作呈现刚性、有噪音等缺点[1-2]。
基于上述问题,多种智能材料驱动的仿生机器鱼开始被研制出来,提供了一种全新的驱动方式[3-4],也为设计新型仿生机器鱼提供了途径。目前,被用于仿生机器鱼的智能材料主要有形状记忆合金(Shape Memory Alloy, SMA)[5]、离子交换聚合金属材料(Ionic Polymer-Metal Composite, IPMC)[6-7]、压电陶瓷(Piezoelectric Ceramics, PZT)[8]和超磁致伸缩薄膜(Giant Magnetostrietive thin film,GMF)[9]等。其中,PZT需要驱动电压高,变形量较小,GMF的控制信号和能源供应均离不开磁场,限制了两种智能材料的工作范围。而IPMC虽然具有驱动电压低、响应快的优点,然而由于其驱动力较小,导致IMPC驱动的机器鱼的游动速度均较低。SMA则具备输出力大和功重比高的优点,综合性能与鱼类肌肉纤维的性能最为接近,相比较而言,更适合应用于仿生机器鱼的驱动设计。
鱼类主要通过尾鳍实现水中的自由游动,当前所研制的仿生鱼大都采用单尾鳍的推进模式,存在着机器鱼的摇艏问题,即在游动中会产生侧向力而产生头部左右偏摆的现象。针对这个问题,国内外研究工作者提出了双尾鳍的推进模式,并取得了诸多研究成果。中国科学技术大学的金通[10-11]等人采用双尾鳍推进方式研制出组合仿生UUV模型(如图1(a)所示),有效抑制了常规尾鳍推进所带来的本体晃动问题,改进了潜航器巡游的稳定性,而且显著提高了推进速度。通过对柔性双尾鳍模型进行测量与分析,表明柔性尾鳍推进时小摆幅摆动运动效率要高于大摆幅运动,双尾鳍推进方式在小摆幅模式下无论在推进力还是在效率方面都要优于单尾鳍。江苏大学的谢欧[12]等人提出了一种新型仿生水下推进器(如图1(b)所示),该推进器采用多关节双尾鳍协同驱动方式,能够实现巡游、加速、转弯和制动等动作。哈尔滨工程大学的于凯[13]等人设计出双尾鳍仿鱼推进器,并制作了仿生双尾推进的实验平台,通过在水池中进行了双尾推进试验研究及采用计算流体力学软件的仿真研究,表明仿生双尾推进器在低频摆动时其相互干扰是有利于推进的(如图1(c)所示)。
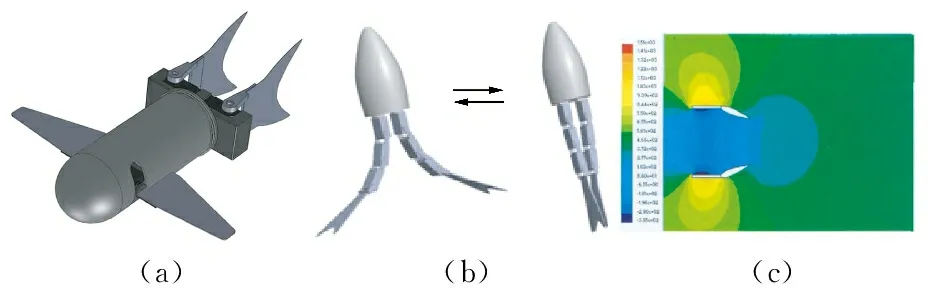
(a) (b) (c)
图1 双尾鳍推进研究
综合前人所做的双尾鳍推进的研究工作,可见其尾鳍结构仍然呈现出较强的刚性摆动,与实际鱼尾的柔性弯曲动作还存在较大的差别。因此本文在总结前人研究成果的基础上,结合课题组所做研究工作[14],提出了一种基于形状记忆合金丝的仿生双尾鳍推进器,结构简单,能最大程度地模拟鱼尾的柔性弯曲动作。同时从实验和仿真两种研究方法出发,验证了所做双尾鳍推进器的性能。
1 尾鳍推进器设计
鱼鳍是鱼类游动的主要功能部件,而柔性弯曲是其主要动作特征,如图2所示。鱼类尾鳍在摆动过程中能实现大幅度的变形,能展现出高度的柔性,这主要得益于其自身的精妙结构。鱼类尾鳍的结构较为简单,也易于模仿,由图2可知,鱼类尾鳍沿尾鳍根部到端部拥有一系列并行排列的鳍条,鳍条之间通过较为柔软的胶原鳍膜进行连接,整个尾鳍鳍面便由鳍条和胶原鳍膜构成,在鳍条的带动下尾鳍进行动作。而每个鳍条的结构也如图所示,是一端连接,另一端分叉的结构形式,分叉部分与尾柄部分的肌肉相连。当一侧尾柄肌肉收缩时,会带动鳍条向该方向弯曲。通过尾柄两侧肌肉的交替收缩实现往复弯曲摆动。
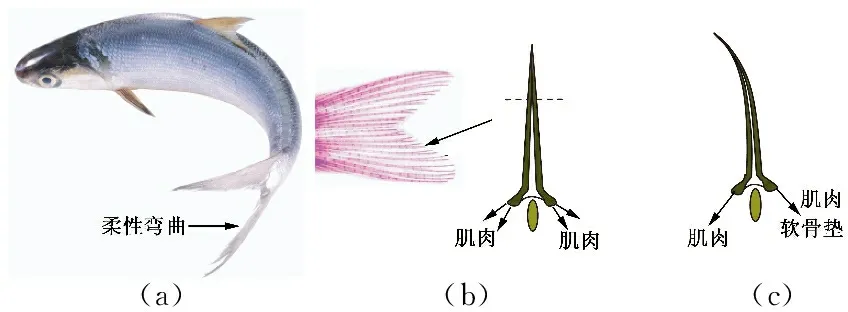
(a)(b)(c)
图2 鱼类尾鳍的柔性弯曲及鳍条结构
基于尾鳍和鳍条的结构,设计了形状记忆合金丝驱动的尾鳍推进器,图3所示是一种内嵌式SMA丝的结构。仿生尾鳍推进器还包括了被动尾鳍、弹性体、蒙皮、支撑体和导线。SMA丝折成"U"字状,紧紧贴附在弹性体的两侧,底端固定于弹性体的一端,开口端固定于支撑体上,并连有两根导线,以便给SMA丝供电。在仿生尾鳍推进器的最外侧覆上一层蒙皮,以便给SMA丝绝缘。
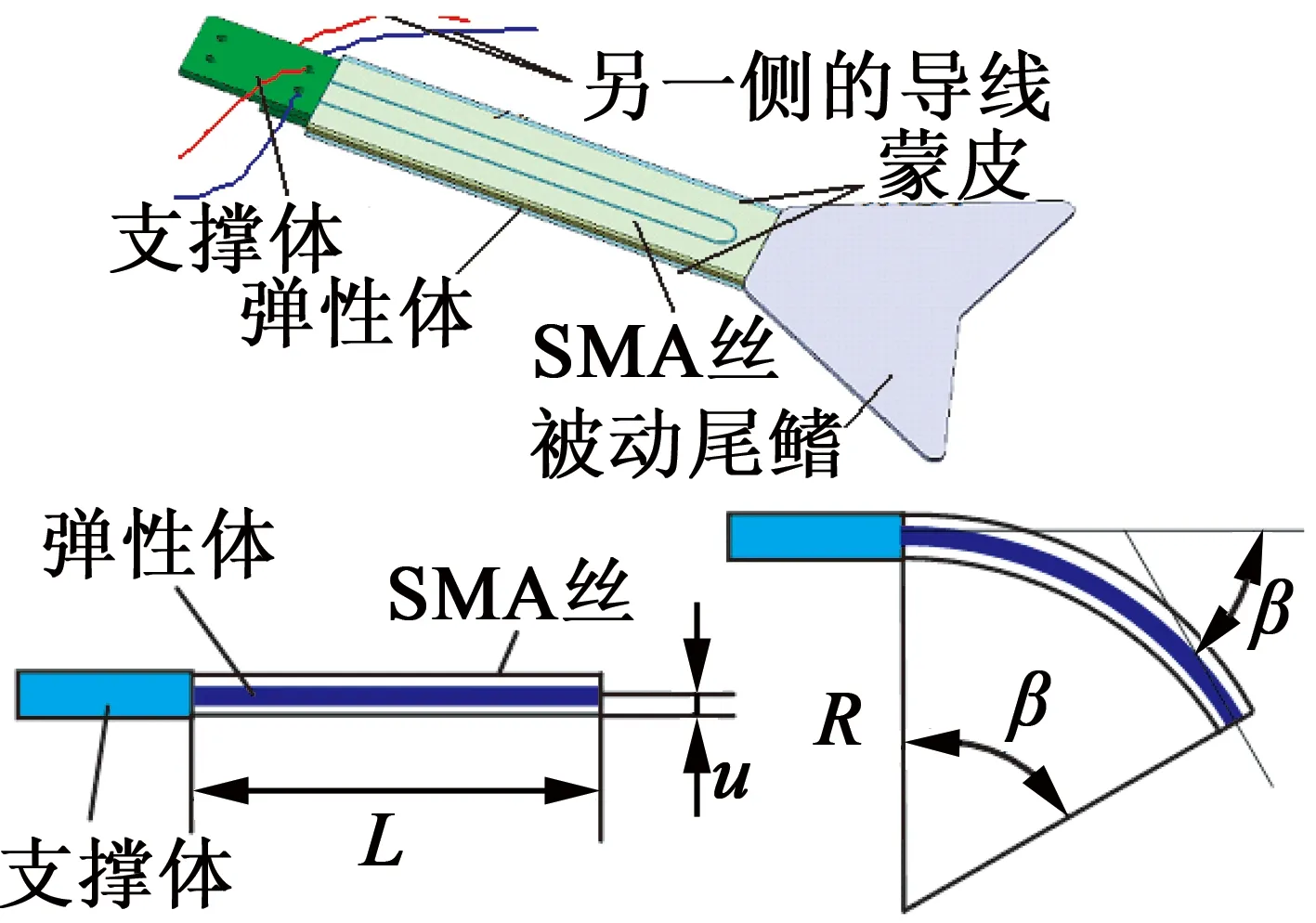
图3 形状记忆合金丝驱动的尾鳍推进器
仿生尾鳍推进器的的动作原理类似于鳍条的动作:SMA丝在嵌入到推进器时处于预拉伸状态,给一侧的SMA丝通电加热使之发生马氏体逆相变,SMA丝开始收缩,由于SMA丝在仿生尾鳍推进器中是偏心布置的,便会带动整个仿生尾鳍推进器就会产生弯曲动作,弯曲幅度很大。在弯曲动作的过程中,会有一些回复能存储于弹性体和蒙皮中。这些回复能使得SMA丝断电发生马氏体相变之后,SMA丝能够再次被拉长,仿生尾鳍推进器也能够恢复到初始状态。给两侧的SMA丝交替供电,则仿生尾鳍推进器实现来回摆动。
2 仿生双尾鳍推进器的仿真研究
为研究双尾鳍摆动的推进性能,利用流体动力学仿真的手段对其进行数值模拟研究。仿真结果首先得到了双尾鳍和单尾鳍动作过程中推进力和侧向力的变化过程,分别如图4和图5所示。可见,无论双尾鳍推进还是单尾鳍推进,其推进力均成周期性波动,且波动频率相同。双尾鳍推进力的幅值明显更大,且大于单尾鳍推进力幅值的2倍。表明双尾鳍摆动时流场之间存在一定的耦合作用,增强了推进效果。而从图5所示的侧向力变化曲线看,双尾鳍推进明显将侧向力进行了抵消,达到了预期的结果。
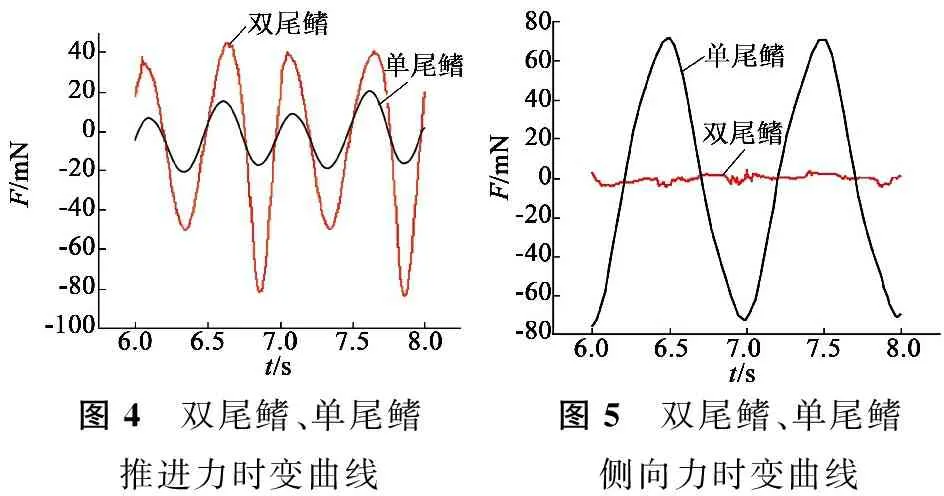
图4 双尾鳍、单尾鳍推进力时变曲线图5 双尾鳍、单尾鳍侧向力时变曲线
仿真中还研究了双尾间距对推进性能的影响,图6所示为双尾鳍摆动在三种不同间距条件下的推进力时变曲线,由图可知,随着间距的增大,双尾鳍合拢摆动时的推进力峰值逐渐降低,表明流场之间的这种耦合作用随双尾间距的增大而逐渐衰弱。然而为确保双尾鳍在摆动时不产生相互碰撞,其最小间距应为尾鳍单侧摆幅的两倍。

图6 不同间距条件下的推进力时变曲线
仿真中还得到了双尾鳍处于动作带动极限位置时的流场压力分布图(如图7所示)。可以看出,双尾鳍之间区域的压力分布则发生了干涉现象,即存在一定的耦合作用。该耦合作用会使高压区域的压强进一步提高,而低压区域的压强则进一步降低。这种耦合作用使得双尾鳍在推进力上能够出现大于单个推进器2倍的效果。此外,双尾鳍XY平面的流场的压力分布始终关于双尾鳍的中轴线呈对称分布,因而双尾鳍产生的侧向力能够得以抵消。
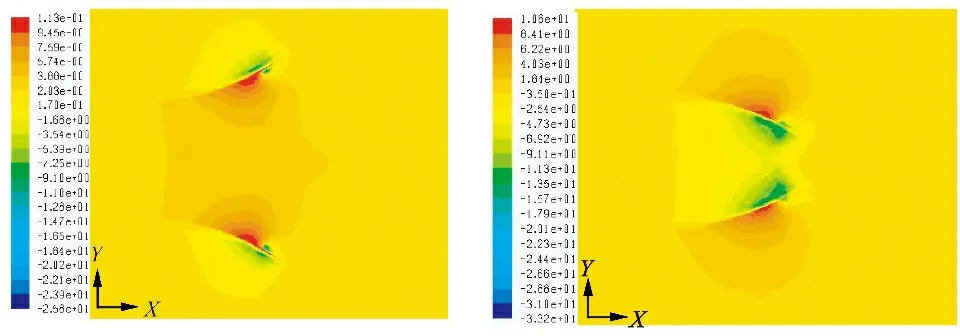
图7 双尾鳍XY平面的流场压力分布图
为了进一步说明双尾鳍摆动时流场中存在耦合作用,图8给出了同时刻双尾鳍在两种间距条件下XY平面的流场速度矢量图。明显地,小间距的双尾鳍动作后泄出的流场会相互间行成耦合作用,增强了流场强度,从而增强了推进效果。双尾间距越小,这种耦合作用越强。仿真中得到的三维涡量图(如图9所示)则更直观地印证了这一结论。
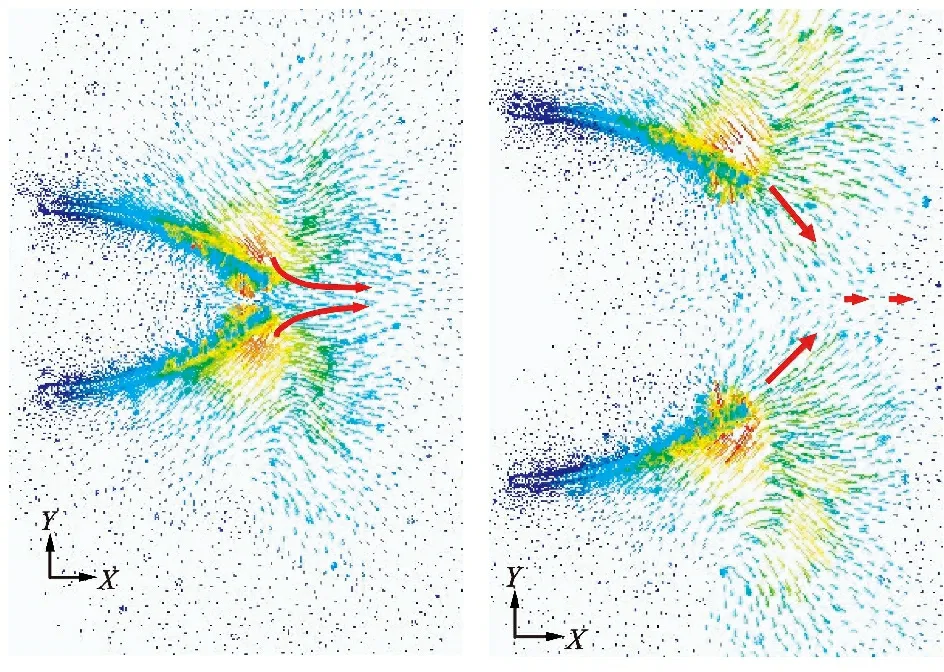
图8 双尾鳍不同间距条件下XY平面的流场速度矢量图
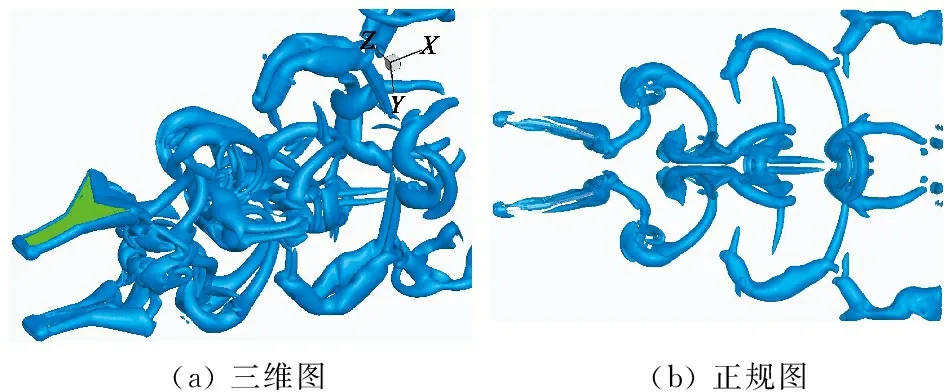
(a)三维图(b)正规图
图9 双尾鳍摆动尾迹的三维涡结构
3 双尾鳍推进力测试实验
为了进一步验证仿真得到的结果,对所研制的双尾鳍推进器动作中的推进性能进行了实验测试。图10和图11分别为对双尾鳍推进力和侧向力的测量装置,两个仿生尾鳍通过中间的支架进行联接,且双尾间距可以进行调节。推进力的测量通过力传感器实验,测量数据通过数据采集卡及上位机上用LabVIEW编制的数据采集软件系统进行显示和记录。

图10 双尾鳍推进力测量
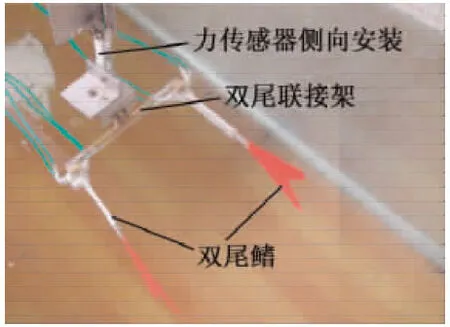
图11 双尾鳍侧向力测量
实验时控制通电参数,使得仿生尾鳍摆动幅度为30°、摆动频率为1 Hz,调整双尾鳍间距为摆动幅值的两倍,并将其与相同条件下单尾鳍摆动所产生的推进力和侧向力进行对比,结果分别如图12和13所示。与图4、图5的仿真结果类似,同样可以得到如下结论:(1) 单尾鳍和双尾鳍推进力都呈现出周期性的变化,双尾鳍的推进力峰值是单尾鳍推进力峰值的2倍以上,再次验证了双尾鳍的摆动存在流场耦合作用,对推进力有增强作用;(2)双尾鳍反向摆动时的侧向力仅在零值附近小范围内波动,验证了双尾鳍的反向摆动对侧向力的抵消作用。

图12 实验测得双尾鳍和单尾鳍推进力时变曲线对比
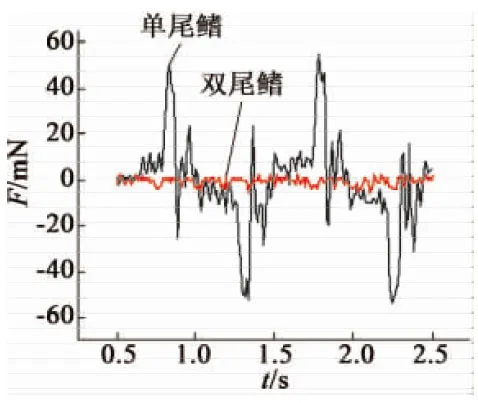
图13 实验测得双尾鳍和单尾鳍侧向力时变曲线对比
4 结 语
为避免单尾鳍驱动的机器鱼的横摆现象,提出一种双尾鳍反向摆动的推进策略,并研制了形状记忆合金丝驱动的双尾鳍推进器,能够模拟鱼尾的结构及柔性动作。对双尾鳍推进器进行了运动过程中的仿真和实验研究。结果表明,双尾鳍推进器通过反向摆动不仅能够有效抑制侧向力的波动,而且由于流场耦合的作用使推进力得到了增强。
[1] 魏清平,王硕,谭民,等.仿生机器鱼研究的进展与分析[J].系统科学与数学,2012,32(10):1274-1286.
[2] 王扬威,王振龙,李健.仿生机器鱼研究进展及发展趋势[J].机械设计与研究,2011,27(2):22-25,32.
[3] 孙敏,冯典英.智能材料技术[M]. 北京:国防工业出版社,2014.
[4] 陈英杰,姚素玲.智能材料[M]. 北京:机械工业出版社,2013.
[5] 杭观荣.基于肌肉性静水骨骼原理的机器乌贼原型关键技术研究[D].哈尔滨:哈尔滨工业大学,2009.
[6] BHANDARI B,LEE G-Y,AHN S-H.A review on IPMC material as actuators and sensors:fabrications,characteristics and applications[J].International Journal of Precision Engineering and Manufacturing,2012,13(1):141-163.
[7] 姜涛,柳乐仙,连慧琴.离子聚合物-金属复合材料的研究进展[J].材料导报,2011,25(17):22-27.
[8] 王健博.压电陶瓷驱动技术研究[D].长春:长春理工大学,2010.
[9] CHU W S,LEE K T,SONG S H,et al.Review of biomimetic underwater robots using smart actuators[J].International Journal of Precision Engineering and Manufacturing,2012,13(7):1281-1292.
[10] 任铮,金通,魏榛,等.双尾鳍组合仿生UUV的研制及其特性研究舰[J].船科学技术,2009,31(7):37-42.
[11] 金通,刘泰然,秦丰华,等.柔性双尾鳍效率的测量和优化[J].实验力学,2013,28(1):27-34.
[12] 谢鸥,颜钦,李伯全.双尾鳍仿生推进器C型转弯运动控制建模研究[J].制造业自动化,2015,37(8):36-38.
[13] 于凯,黄胜,王超.一种新型的仿生双尾推进器模型实验[J].实验流体力学,2008,22(1):27-30.
[14] 李健,郭艳玲,王振龙,等.SMA丝驱动的仿生尾鳍推进器的实验研究[J].微特电机,2013,41(7):10-14.
Simulation and Experimental Research on Bionic Double Tail Fin Actuated by SMA Wires
LIJian1,WANGRong-zhen2,WUJi1,GAOFei3,WANGZhen-long3
(1.Northeast Forestry University, Harbin 150040, China;2.Architecture Design Institute of Beijing Military Region, Beijing 100042, China ;3.Harbin Institute of Technology, Harbin 150001, China)
Bionic fish propelled by single tail fin will produce periodic and more substantial lateral force, making the fish produce lateral oscillations and yaw, is not conducive to swimming stably. In order to eliminate the effects of lateral force, a double tail fin swimming strategy was proposed. The lateral forces generated during the swing can be counteracted by swing symmetrical double tail fin. A thruster based on bionic double tail fin actuated by shape memory alloy wires was developed. The propulsion performance of the d thruster based on bionic double tail fin was analyzed by the method of simulation and experiment.
shape memory alloy (SMA) wires; bionic double tail fin propulsor; simulation; experimental research
2015-12-28
中国博士后基金项目资助(2015M571382);黑龙江省自然科学基金项目资助(QC2013C058);2015年大学生创新创业项目(201510225137)
TM359.9
A
1004-7018(2016)08-0022-04
李健(1985-),男,讲师,研究方向为智能材料、仿生水下机器人。