可变面积仿生尾鳍设计及推力分析
2022-10-31何建慧章永华董斯伟
何建慧, 章永华, 董斯伟
(1.台州职业技术学院 机电工程学院, 浙江台州 318000; 2.台州技师学院 自动化系, 浙江 台州 318000)
身体/尾鳍(BCF)推进模式的鱼类,尾鳍在直线巡游、调节鱼体稳定性以及转弯等机动性游动中起着重要的作用[1]。因此,大量科研工作者针对尾鳍进行了广泛的研究。
早期 “大摆幅细长体理论[2]”、“波动板理论[3]”、“三维波动板理论[4]”、“势流理论[5]”、“射流推进理论”[6]等的发展为揭示尾鳍摆动推进机理提供了坚实的理论基础。随着以计算机为代表的科技飞速进步,DPIV技术[7]和CFD技术[8]在仿生学领域得以广泛应用。呈现了尾鳍运动时边界层及周边流体三维可视流体结构,从流固耦合[9]和涡动力学[10]角度分析了尾鳍刚度[11]、尾鳍形状[12]、鳍条运动[13]、前缘涡[14]及摆动相位[15]等对尾鳍推进力和效率的影响。在此基础上,开发了基于工程应用需要的各类仿生尾鳍,并对以尾鳍摆动驱动的仿生机器鱼推进性能进行优化[16-20]。
上述研究成果缺少因尾鳍面积改变对推进效果影响的报道。实际上,通过高速摄像系统记录分析活体鱼类巡游时尾鳍周期性运动的情况,发现尾鳍周期摆动时,在流体阻力和鳍条主动调节共同作用下,尾鳍迎风面面积呈周期性变化[21]207。受此启发,刘波等设计了一款能够通过“窗口”开闭实现面积变化的尾鳍模型。试验测试发现:合理控制尾鳍摆动和“窗口”开闭节拍,可以有效提升尾鳍装置的推力表现[21]210。但该研究没有系统阐述面积变化对提高尾鳍推进性能的原因。
为探究变面积对尾鳍摆动推进力影响的规律,课题组设计了一款舵机驱动仿生尾鳍摆动机构,通过交替加热和冷却形状记忆合金弹簧,使其变形驱动挡板绕固定轴转动,遮挡或露出漏空区域来实现尾鳍面积的改变。研究了相同运动学参数下,尾鳍表面漏空区域的形状、位置和大小等参数对推力的影响,根据尾鳍表面压力和周围区域流体迹线分布情况,结合尾鳍不同切面涡结构,从涡动力学角度揭示试验结果的内在原理。
1 可变面积仿生尾鳍设计
可变面积仿生鱼尾部机械结构如图1所示,主要由摆动机构和变面积机构组成。摆动机构核心部件是型号为LW-20MG全防水大扭力金属齿数码舵机。将舵机输出轴固定在支架一端,舵机本体通过紧固件固定在铝制固定架上,固定架则通过轴承与支架另一端活动连接,支架端面与前侧鱼体固连。变面积尾鳍外形采用鲹科鱼类的“新月型”,利用金属支架搭建外形轮廓,覆盖薄铁皮。在上下两侧对称位置分别开设矩形漏空区域,配以与该区域面积相当的挡板。2个挡板通过固定轴连接并可在形状记忆合金弹簧的驱动下绕固定轴作往复旋转运动。

图1 可变面积仿生鱼尾部机械结构
尾鳍在舵机控制下作往复周期性摆动,如图2所示,启动阶段从中间位置“O”点开始,依次经过“O→A→O→B→O”,完成一个周期的摆动运动。在这个过程中,尾鳍经历了击水(in-stroke)和回缩(out-stroke)2个过程。击水过程主要是尾鳍A→O和B→O的运动阶段,回缩过程主要是尾鳍从O→A和O→B的运动阶段。研究表明:击水过程是尾鳍摆动产生推进力的主要阶段,而回缩过程则是阻力的主要来源之一。因此,在试验测试阶段,尾鳍面积按照如下规律变化,即:击水过程时,形状记忆合金弹簧不动作,挡板遮挡住矩形漏空区域。在回缩过程,通过给形状记忆合金弹簧施加电流,利用电流热效应使其受热收缩变形,驱动挡板绕固定轴旋转,不再遮挡矩形漏空区域。
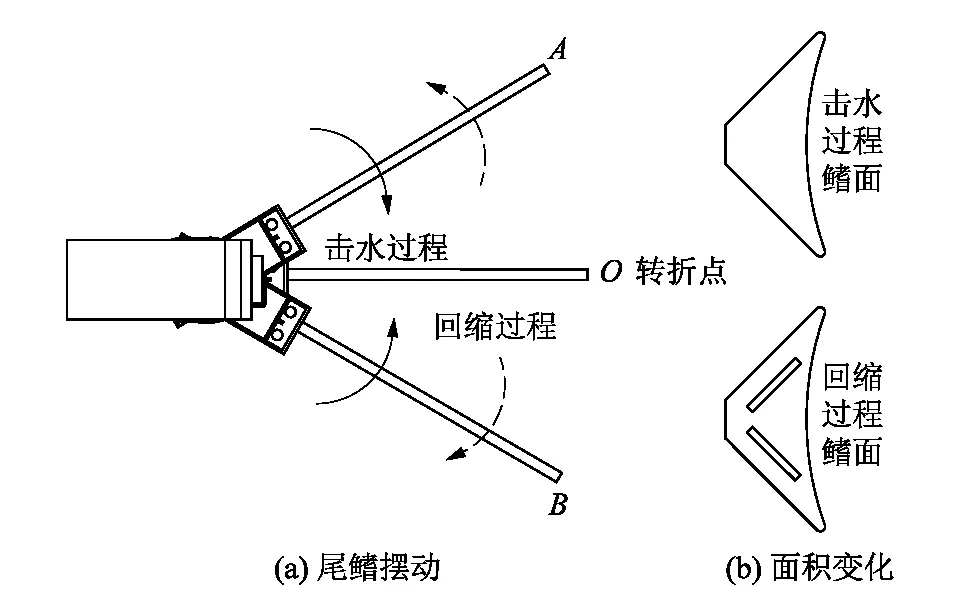
图2 尾鳍摆动和鳍面面积变化关系
2 初步试验
2.1 运动学建模
由于仿生尾鳍在推进过程中是整体摆动,故采用图3所示坐标系建立运动学方程。
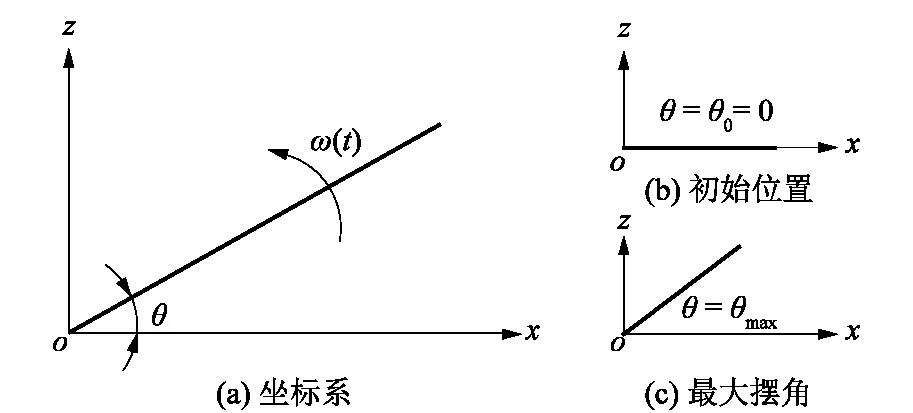
图3 尾鳍坐标系
设定仿生尾鳍摆动角度按照正弦规律变化,则其运动学方程为:
(1)
式中:θ(t)为仿生鳍摆动角度,ω(t)为角速度,β(t)为角加速度,θmax为最大摆幅,f为摆动频率,θ0为初始相位,t为时间。当尾鳍从中间位置“O”点开始运动时,θ=θ0=0。
2.2 试验装置
针对上述可变面积仿生尾鳍,初步测试了θmax取0.2倍尾鳍宽度,f为4 Hz时,面积不变(固定面积)和面积按照上述规律变化(变面积)2种情况尾鳍周期性摆动的平均推进力。试验系统原理如图4所示,尾鳍支架固定在连接杆上,连接杆两侧分别设置垂直布局的应变片传感器,水槽上方为信号采集与处理电路。当舵机驱动尾鳍运动时,尾鳍产生的推进力使连接杆产生微变形,该变形引起应变片传感器输出电压的改变,通过信号采集与处理电路对细小的电压变化进行接收和处理,经数据处理得到尾鳍推进力大小信息。

图4 试验系统原理图
2.3 试验结果
从采样数据中选取尾鳍稳定摆动的10个周期,计算其产生的平均推进力,如图5所示。

图5 试验结果
从结果可知:固定面积尾鳍摆动平均推进力约为3.24 N,标准差为0.015;变面积时的平均推进力约为3.99 N,标准差为0.020。尾鳍变面积使得推进力提高了约23.1%,这一结果与文献[21]211页结论类似。
3 数值计算
3.1 模型种类
为进一步探究试验结果的内在机理,利用计算流体力学基本原理,借助软件FLUENT(版本为6.3.26),根据仿生尾鳍实际工程应用需要,设计了几种类型尾鳍,如图6所示。对其推进力进行详细分析,并总结出漏空区域的形状、位置和大小等参数对推力影响的规律。计算模型各参数取值如表1所示。
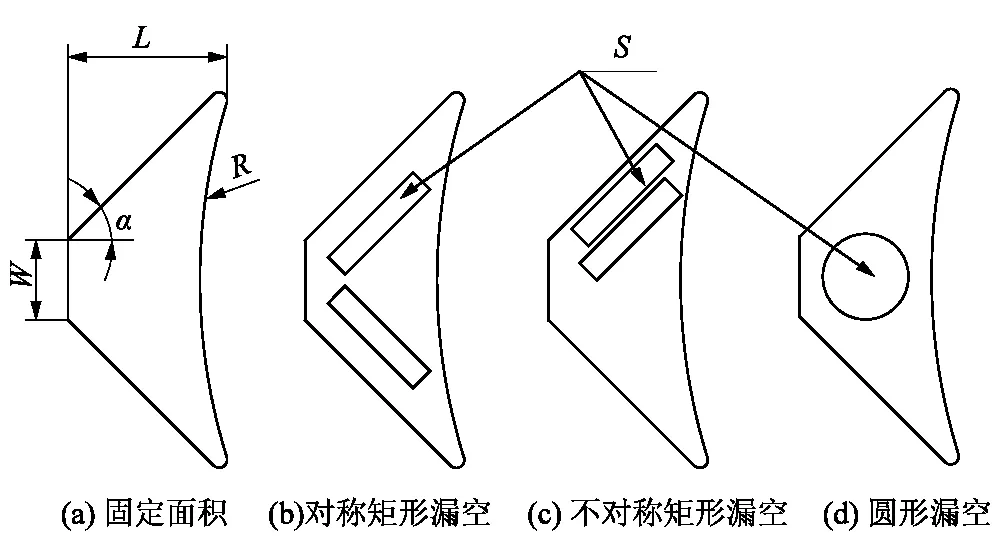
图6 尾鳍漏空区域的形状及分布

表1 模型参数取值
3.2 控制方程
在计算域内求解Navier-Stokes方程和连续性方程:
(2)
式中:V为水流速度,ρ为流体密度,p为压力,F为物体对流体的作用力,μ为流体动力黏性系数。
3.3 初始条件
来流速度大小为0.1 m/s,速度入口(velocity inlet)和压力出口(pressure-outlet),其余为无滑移壁面(no slip wall)边界条件,即:
(3)
式中:vj为第j个计算区域量纲为一速度,vj∞为无穷边界量纲为一速度,p∞为无穷边界量纲为一压力,n为波数。
计算域相关仿真初始条件设置及计算参数设置分别如表2和表3所列。
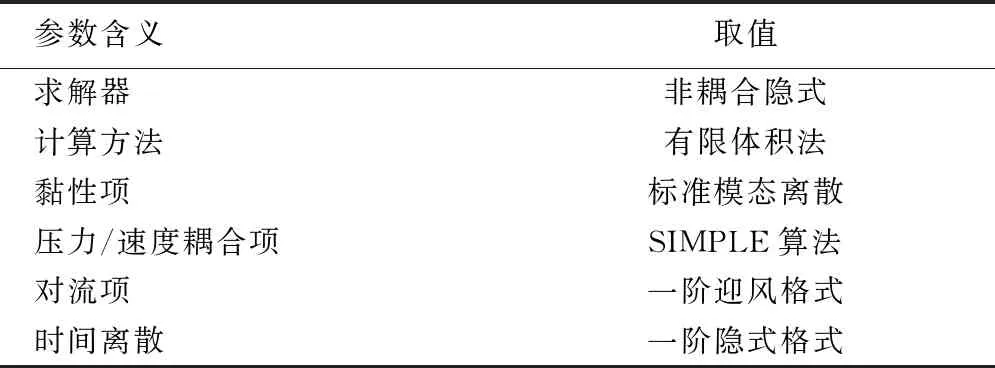
表2 计算初始条件设置

表3 计算参数取值
3.4 计算区域与网格划分
选取长方体计算区域如图7所示。

图7 计算区域
模型距离入口边界Din为1.5个模型长度,距离出口边界Dout为3个模型长度,使尾迹区域漩涡能够充分发展。为减少壁面效应的影响,设置模型距离四周壁面1.5个模型长度。采用四面体非结构网格对计算区域进行划分,并对模型周边区域及尾迹区域进行局部网格加密,总网格数约为450万个。网格随着模型的运动不断被压缩或拉升,在每个时间步里,当网格单元畸变超过0.6时,自动对网格进行重新划分。动网格技术在处理移动边界问题上非常有效[22],并在计算鱼类推进问题上得到了很好的应用[23]。
3.5 量纲为一的阻力系数
量纲为一的阻力系数Cd定义如下:
(4)
式中:ρ为流体密度,V为水流速度,Fx为流体沿x轴的作用力,S为鳍面迎水面面积。
量纲为一的阻力系数的时间平均值计算如下:
(5)
式中:m和i取值分别为0,1,2,3,…,k等自然数(其中k为采样点个数)。量纲为一的阻力系数值为正说明在此计算条件下模型运动产生的推进力小于流体阻力;反之,说明推进力大于流体阻力,且负值越小,推进力越大。
3.6 涡量计算
三维涡量Ω根据式(6)求得:
(6)

式中:Vx,Vy和Vz分别为流体沿x,y和z方向速度分量。
3.7 程序代码
由于涉及到动网格技术,采用UDF程序DEFINE_CG_MOTION函数,代码如下。
/**********************
#include "udf.h"
DEFINE_CG_MOTION(piston, dt, vel, omega, time, dtime)
{
real coff=0;
if (time<1)
coff=time;
else
coff=1;
omega[1]=0.533*M_PI*M_PI*coff*cos(8*M_PI*time);
}
**********************/
4 计算结果
4.1 试验结果验证
按照与试验条件相同的运动学参数和面积变化规律,计算了固定面积和变面积尾鳍运动产生的推力,结果如图8所示。
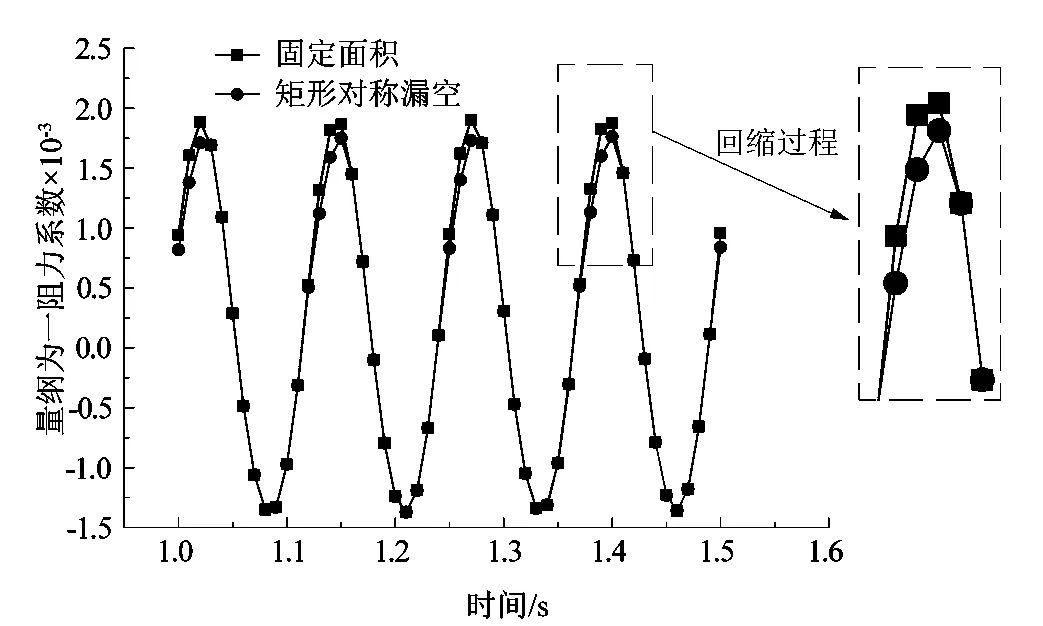
图8 2种面积的尾鳍量纲为一的阻力系数对比
从图中可知,量纲为一阻力系数曲线呈现等频率正弦波动变化规律。在击水过程,固定面积和变面积尾鳍产生的量纲为一阻力系数的波动幅度近似相等。但是在回缩过程中,固定面积的尾鳍运动产生的波动幅度要大一些,表明变面积尾鳍受到的流体阻力要小于固定面积的尾鳍。通过计算平均量纲为一的阻力系数发现:尾鳍变面积时摆动产生的平均量纲为一阻力系数为1.53×10-4,而固定面积的尾鳍摆动产生的平均量纲为一阻力系数为1.98×10-4,尾鳍在回缩过程中面积的改变将推进力提高了近25%。说明了在尾鳍摆动回缩阶段,通过设置漏空区域来减少迎水面面积的方法可以降低该过程的流体阻力,从而提高尾鳍周期摆动的平均推进力。
为深入研究变面积尾鳍中漏空区域的形状、位置和大小等参数对推力的影响规律,进一步计算了矩形漏空对称与不对称分布型、固定面积型和圆形漏空型4种情况下尾鳍的推进力。
4.2 压力分布
图9所示为4种型状下尾鳍两侧(迎水面和背水面)表面压力分布,其中T为尾鳍运动周期。对于单纯依赖尾鳍摆动推进的鱼类而言,尾鳍两侧表面压力差以及因尾鳍摆动在尾迹区域形成反卡门涡对产生的射流是推进力的2个主要来源。从图9发现,无论何种型状,尾鳍两侧表面均呈现交替的高低压区。高低压区在鱼鳍两侧的分布形成了从高压区指向低压区的压力差;压力差将在鳍面产生力的侧向分量和横向分量,如图10所示。侧向分量是导致偏航的主要因素,可实现转弯等机动性动作。横向分量若与推进方向一致则为推力,若与推进方向相反则为阻力。
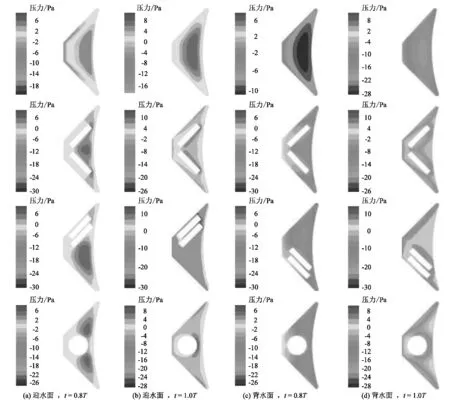
图9 4种形状尾鳍的压力分布
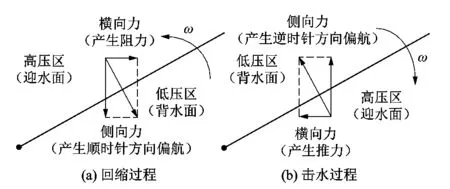
图10 压力差导致的尾鳍受力
由于尾鳍在回缩阶段存在的漏空区域,使得表面压力分布状态发生明显变化,改变了鱼鳍表面压力分布的均匀性,这种改变直接导致了鱼鳍两侧表面压力差的减小,进而降低此过程尾鳍受到的流体压差阻力。
4.3 流线图
为了更直观显示尾鳍摆动对流场的影响,图11给出了尾鳍完成一周摆动后的流线图。流线反映了该时刻不同流体质点的运动方向,流线改变说明此时流体结构发生变化。从图中可知,尾鳍摆动对流经其表面及周边的流体产生调制,尤其是尾鳍两侧(“Ⅰ”区域),这种调制作用尤为显著。而对于有漏空区域的尾鳍,经过其表面的流体则穿过漏空区域流向另一侧(“Ⅱ”区域),流体结构的改变也影响了尾迹区域涡街的结构和强度,继而对推进力产生影响。

图11 t=T时4种形状尾鳍的流线图
4.4 量纲为一的阻力系数
图12对比了4种形状尾鳍的量纲为一阻力系数随时间变化情况。由于变面积发生在尾鳍摆动回缩阶段,因此,击水过程曲线的波动幅度基本一致。而在回缩过程,固定面积尾鳍的曲线波动幅度最大,这说明该过程中固定面积受到的流体阻力最大。对于其它3种情况,依次是矩形对称漏空、矩形不对称漏空和圆形漏空。圆形漏空的尾鳍在回缩过程量纲为一的阻力系数的波动幅度最小,受到的流体阻力也最小,表明圆形漏空的尾鳍产生的周期性推进力要大于其它情况的推进力。这一点在平均量纲为一阻力系数图中(图13)得到充分证明。
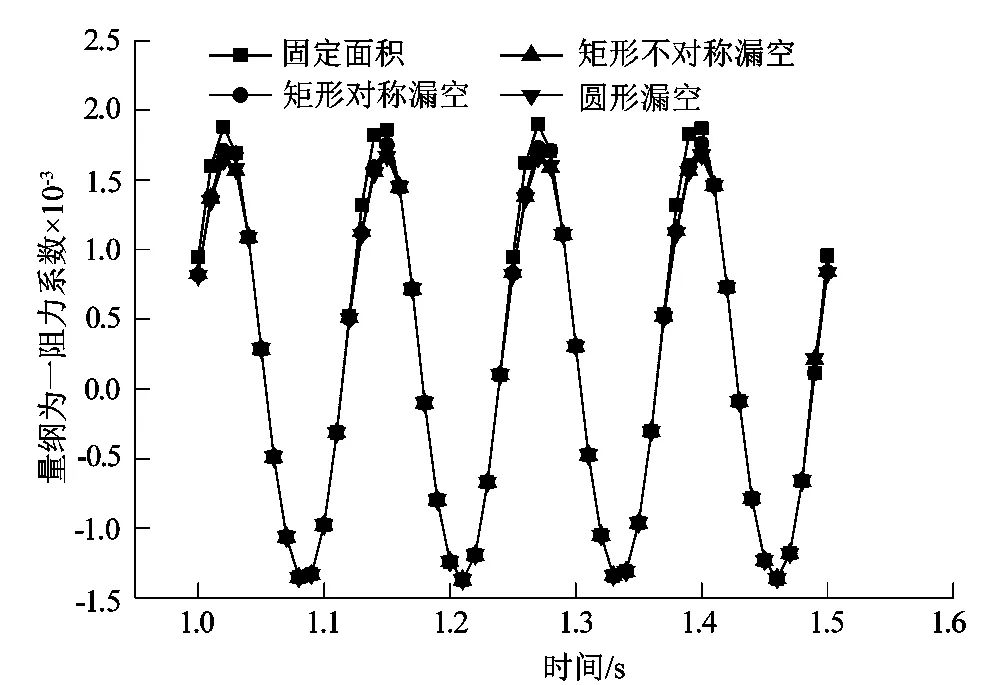
图12 4种形状尾鳍的量纲为一的阻力系数变化
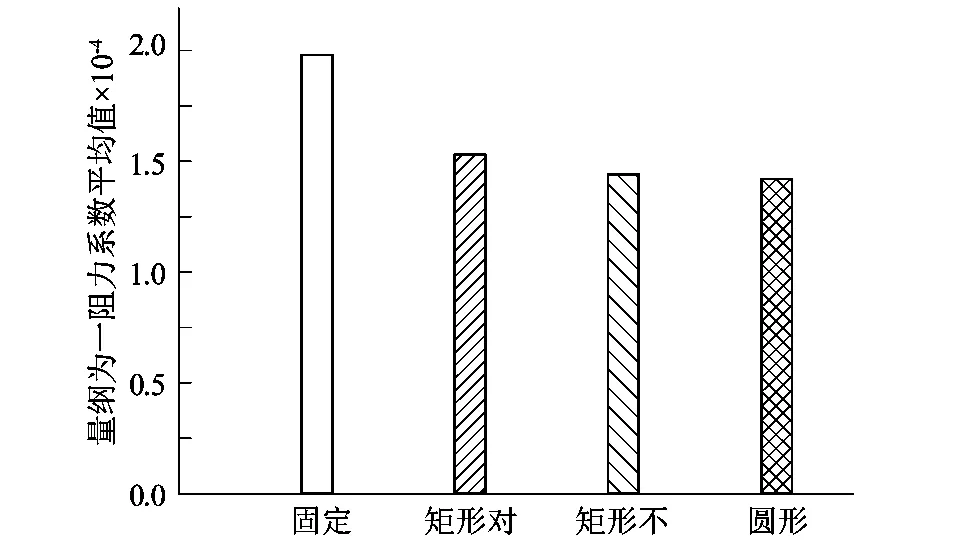
图13 4种形状尾鳍的平均无量纲阻力系数
图13给出了4种情况下平均量纲为一阻力系数的大小。其中固定面积尾鳍平均量纲为一阻力系数约为1.98×10-4。在变面积尾鳍中,矩形对称漏空尾鳍的平均量纲为一阻力系数值约为1.53×10-4,不对称漏空尾鳍的值约为1.44×10-4,圆形漏空尾鳍的值则约为1.42×10-4。表明相同情况下,变面积尾鳍产生的推进力均大于固定面积。漏空区域的不对称分布产生的推进力大于对称分布。圆形漏空产生的推进力最大。
4.5 涡街分布
利用式(6)求解计算域内涡量场,分析不同截面上涡街分布如图14所示。图中尾鳍尾部区域内形成明显的漩涡,相对中间截面上涡的集中分布,靠近尾鳍边缘截面上漩涡分布更加分散,上下2列涡间距更大。这种旋转方向相反的涡对在尾部区域交替排列,涡对间形成射流,根据作用力和反作用力原理,射流的存在将在尾鳍表面产生与推进方向一致的流体反作用力,该力和尾鳍两侧因压力差产生的力共同作用,成为尾鳍产生推力的动力来源。同时,通过对比发现:漏空区域的存在制约涡街的形成和发展过程,影响原有的涡街结构。最明显之处是尾鳍表面出现流体边界层分离,在漏空区域形成新的漩涡。这也从另一方面说明,虽然尾鳍回缩过程中漏空区域的存在可以减少流体阻力,但是漩涡结构改变以及边界层分离导致形体阻力损失却增加了阻力。因此,变面积尾鳍在回缩过程受流体阻力大小是上述博弈的综合结果。
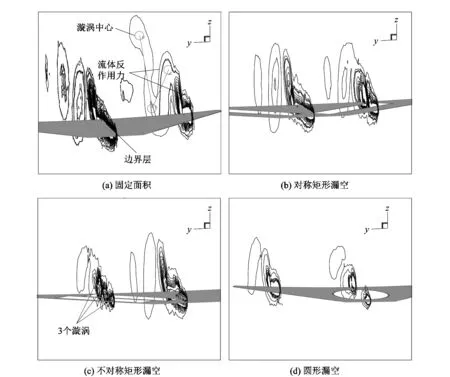
图14 t=T时4种形状尾鳍不同截面涡街
5 结论
在试验中发现尾鳍周期性摆动过程中恰当地改变其面积可以有效地增加平均推进力的基础上,课题组利用计算流体动力学原理,深入研究了相同运动学参数下,恰当地交替遮挡漏空区域以改变尾鳍迎水面面积对推进力的影响规律及内在机理。同时给出了尾鳍在4种形状时摆动形成的表面压力、流体流线、推进力大小以及涡街结构等情况,总结漏空区域形状、位置和大小等参数对推力影响。得出如下结论:
1) 无论从试验还是流体力学计算结果看,交替遮挡漏空区域以适时改变尾鳍面积有利于提高尾鳍摆动推进力,在本研究条件下可以提高20%至25%的推进力。
2) 在尾鳍摆动整个周期内,变面积尾鳍产生的推进力大于固定面积;就变面积尾鳍而言,矩形不对称漏空产生的推进力大于对称分布,圆形漏空产生的推进力最大。这说明漏空区域的形状、位置和大小对变面积尾鳍的推进力大小有一定的影响,今后将在这方面开展进一步的理论和试验工作。
3) 对变面积尾鳍,虽然尾鳍回缩过程中漏空区域的存在可以减少流体阻力,但是漩涡结构改变以及边界层分离导致形体阻力损失却增加了阻力,这在一定程度上影响了尾鳍周期摆动推进效果。如何调整漩涡结构,降低或抑制边界层分离也是未来研究的另一个方向。
该研究为提高基于尾鳍摆动推进的仿生水下推进器性能提供了新思路和新方向。今后,将进一步提取仿生特征,考虑尾鳍在摆动过程中整体柔软变形,从而产生迎水面积变化,并产生涡流变化情况。深入探究尾鳍在摆动过程中三维结构变化蕴含的机理。
