基于TMS320F28335的空间矢量脉宽调制研究
2016-11-25黄家晗
黄家晗
(同济大学 电信学院,上海 200092)
基于TMS320F28335的空间矢量脉宽调制研究
黄家晗
(同济大学 电信学院,上海 200092)
通过分析空间矢量脉宽调制的原理,运用数学的方法计算出在不同的扇区需要的脉宽,同时也给出了如何判断当前扇区的方法。由于该原理简单,无需进行三角函数计算,因此编程简洁,能够有效降低了系统运行时间。利用这些原理通过TMS320F28335上的增强型脉冲宽度调制器产生3组互补对称的 脉宽调制信号来控制永磁同步电机,同时使用死区控制子模块和错误控制子模块保证了系统运行的可靠性和安全性。
伺服;空间矢量脉宽调制;永磁同步电机;数字信号处理器
空间矢量脉宽调制[1](SVPWM)是近年发展的一种比较新颖的控制方法,是由三相功率逆变器的6个功率开关元件组成的特定开关模式产生的脉宽调制波[2],能够使输出电流波形尽可能接近于理想的正弦波形,在交流感应和永磁同步电机电机驱动上面有广泛的应用。
空间矢量脉宽调制(SVPWM)技术与正弦脉宽调制[3](SPWM)相比较,绕组电流波形的谐波成分小,使得电机转矩脉动降低,旋转磁场更逼近圆形,而且使直流母线电压的利用率有了很大提高,且更易于实现数字化。
TMS320F28335 DSP是美国德州仪器(Texas Instruments,TI)公司新推出的一款浮点型数字信号处理器。它在已有的DSP平台上增加了浮点运算内核,既保持了原有DSP芯片的优点,又能够执行复杂的浮点运算,可以节省代码执行时间和存储空间,具有精度高、成本低、功耗小、外设集成度高,数据及程序存储量大和AD转换更精确快速等优点,是更加优秀的嵌入式工业应用软件[4]。
1 空间矢量脉宽调调制原理
逆变器三相桥臂如图1所示,从图中可以看出6个功率管总共有8种开关状态,这些组合以及由此产生线与线之间的输出和相电压跟直流母线电压VDC之间的关系如表1所示。
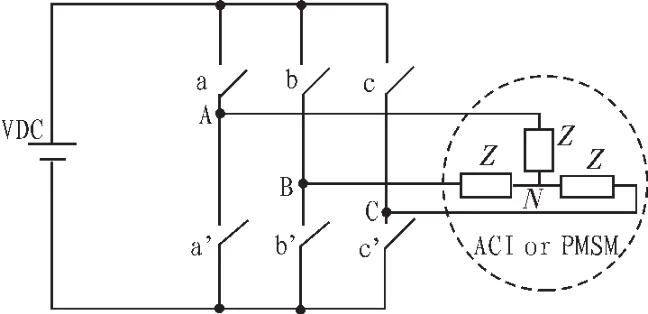
图1 逆变器三相桥臂
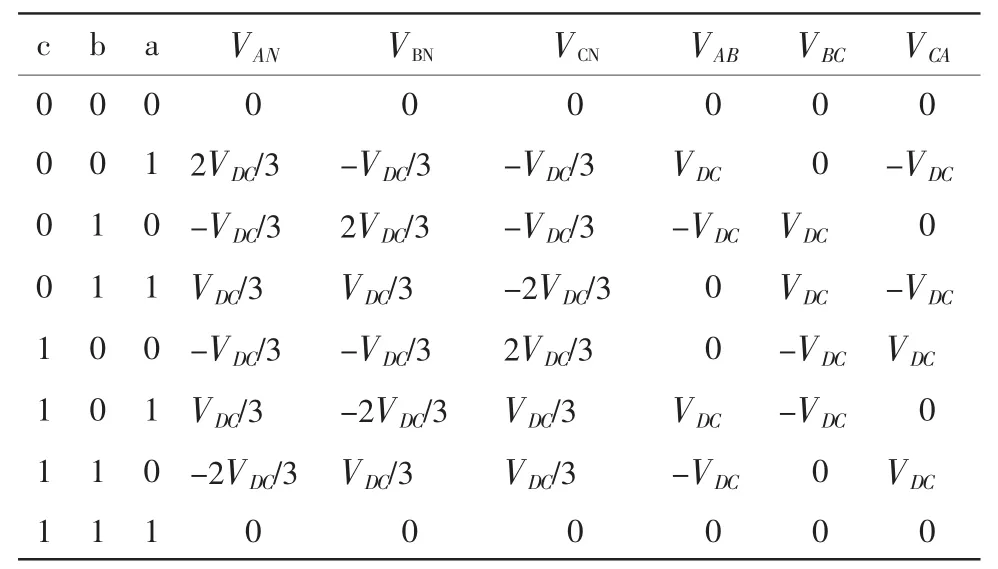
表1 打开关闭时三相逆变器产生的瞬时电压
通过Clarke变换[5]。将基于3轴、2维的定子静止坐标系的各物理量变换到2轴的定子静止坐标系中,其转换方程式为:

用矩阵来表示上述方程,亦可写为:

由于事实上开关状态只有8个组合,依照晶体管指令信号(c,b,a)的状态VSα和VSβ在2轴的定子静止坐标系中也只有有限的值。VSα和VSβ的这些值在与其对应的相电压(VAN,VBN,VCN)瞬时值列在表2中。

表2 开关模式及相应的空间向量
在表2中所列的值被叫做符合适当晶体管指令信号(c,b,a)在(α,β)坐标系中的基本空间矢量。表2中最后一列是空间矢量对应的(c,b,a)信号。比如(c,b,a)=001表示空间矢量是U0。通过开关组合定义的8个空间矢量见图2所示。
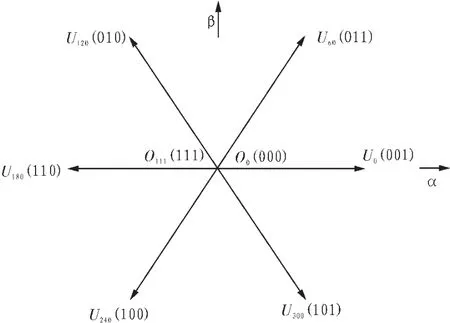
图2 基本空间矢量
2 计算持续时间
我们把定子参考电压矢量的投影设为Uout,空间矢量脉宽调制技术的目标是通过给定一个近似的定子参考电压矢量Uout然后调节符合空间矢量位置的开关组合达到控制的目的。参考电压矢量Uout是通过在(α,β)坐标系中的α和β来体现的。图3是参考电压矢量,(α,β)坐标系以及空间矢量U0和U60。同时也给出了(α,β)坐标系与空间矢量U0和U60的关系。ΣVSβ表示β在空间矢量U0和U60中的总和,ΣVSα表示β在空间矢量U0和U60中的总和。因此:


图3 参考电压矢量投影
图3 的例子中参考电压矢量Uout是在包含U0和U60的扇区中。此时Uout可以由U0和U60来表示,因此我们可以写为:
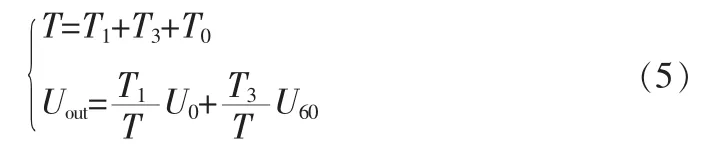
在这里T1和T3是U0和U60在周期T内各自持续的时间。T0是空矢量的持续时间。这些持续时间能够通过下面的式子计算出来:
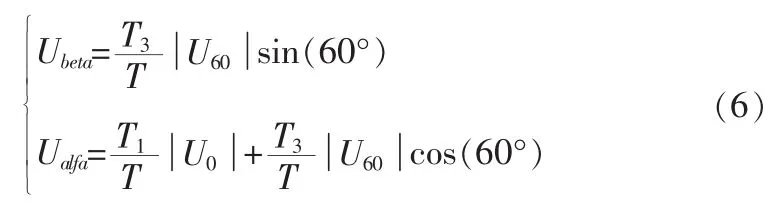
从图(3)和表(2)中明显可以看出所有的空间矢量数值均为2VDC/3。此时标准的相电压(线与中性点)的电压为,空间矢量的值变为。也就是说标准值为。因此可以从式(1)中计算出持续时间为:
在这里,Ubeta和 Ualfa同样表示在(α,β)标准坐标系中Uout和最大相电压的关系。其他剩余的时间为零矢量T0。作为总的周期T的一部分,其持续时间可以有下式给出:
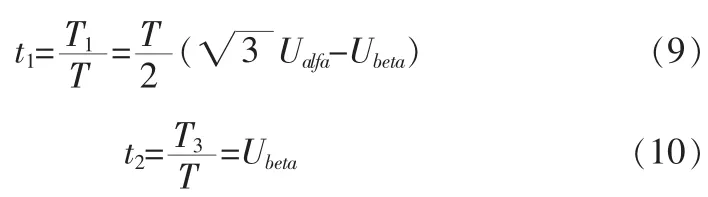
以类似的方式可以得出,当Uout所在扇区包含U60和U120时可以知道,由此可以计算持续时间为:
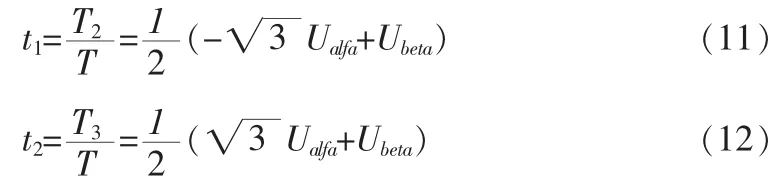
其中T2为U120在周期T内的持续时间。现在定义3个变量X、Y和Z用下面方程来表示:
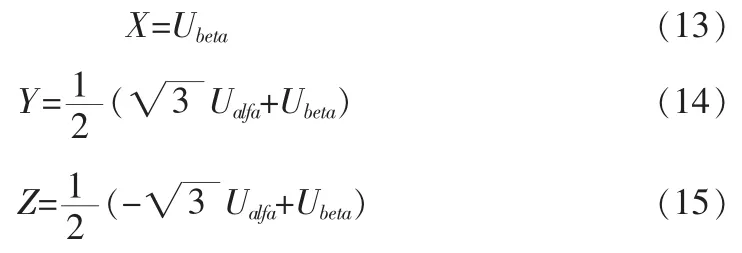
当Uout所在扇区包含U0和U60时,t1=-Z,t2=X。
当Uout所在扇区包含U60和U120时,t1=Z,t2=Y。
同理,当Uout在其他空间矢量包含的扇区时可以计算出t1和t2。不同扇区t1和t2与X、Y和Z的关系如表3所示。
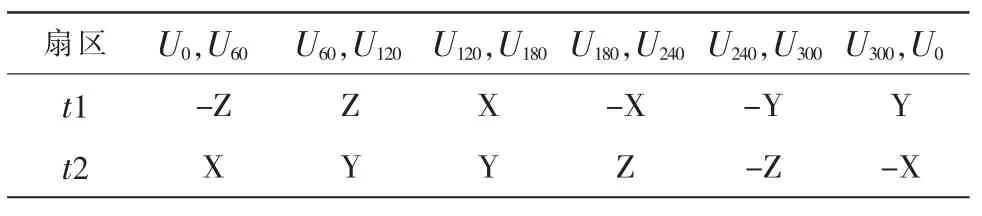
表3 不同扇区t1和t2与X、Y和Z的关系
3 判断扇区
为了知道处于哪个扇区,需要根据Clarke逆变换把Ualfa和Ubeta转换为3个平衡的相位Vref1、Vref2和Vref3:
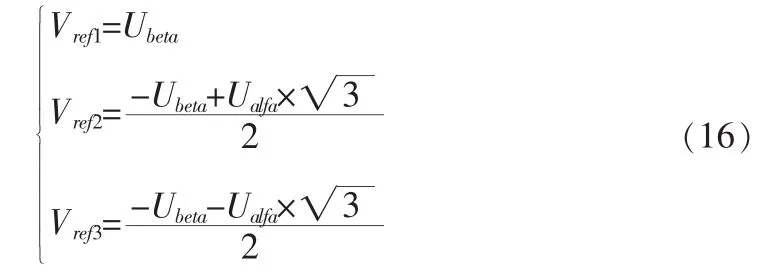
因此在(α,β)标准坐标系中的参考电压为:
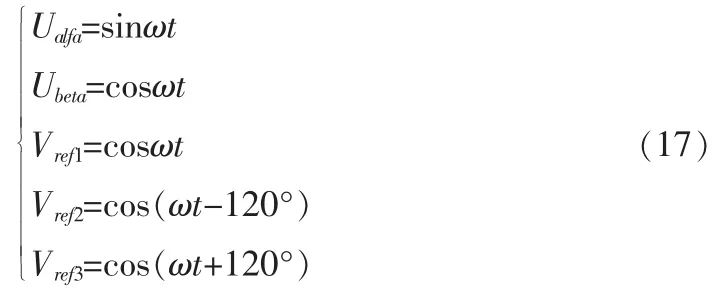
根据式(16)(17)通过下面的方式可以取得扇区信息:
当Vref1>0时a=1,否则的话a=0;
当Vref2>0时b=1,否则的话b=0;
当Vref3>0时c=1,否则的话c=0;
此时的扇区为:4×c+2×b+a。
例如,在图(2)中,a=1时的向量为U300、U0和U60。这些向量的相位分别为ωt=300°、ωt=0°和ωt=60°。因此Vref1>0此时a=0。
4SVPWM在DSP上的实现
在SVPWM算法的软件上实现上,基本思路是通过上述计算得到的不同扇区对应的持续时间加载给计数比较寄存器(CMP)来实现不同脉宽的PWM。具体实现中需要根据不同的晶振频率来设置时间基准周期寄存器(TBPRD),计数器模式(CTRMODE)为递增递减计数模式,主计数比较A(CMPA)和B(CMPB)加载模式为时间基准计数器等于零时加载。当满足条件时,就可在DSP的6个PWM输出引脚得到具有所需占空比的3组互补对称的PWM信号。另外重要的一点是要设置死区时间,死区是指在小输入情况下系统增益很小或者为0的情况[6]。由于TMS320F28335有专门的死区控制子模块,因此我们只需要设置死区控制输出模式为对于ePWMxA输出的上升沿延迟和ePWMxB下降沿延迟完全使能,极性选择控制为主高互补(AHC)模式,上升沿和下降沿延迟时间一般设定为3 μm。最后为了保护功率开关元件利用DSP的错误控制子模块来保证出错时关闭PWM,在错误区允许中断寄存器(TZEINT)中启用中断的产生,并使用HWI管理器来配置硬件中断的ISR(中断服务函数)[7]。
5 结束语
文中介绍了着重空间矢量脉宽调制的原理,以及利用此原理来计算持续时间,并且通过Clarke逆变换经过一系列计算来判断此时所处的扇区。由此可以实现在TMS320F28335上产生3组互补对称的PWM信号来控制永磁同步电机。该原理简单,无需进行三角函数计算,编程简洁,有效降低了系统运行时间。
[1]陈国呈.PWM逆变技术及应用[M].北京:中国电力出版社,2007.
[2]寇宝泉,程树康.交流伺服电机及其控制[M].北京:机械工业出版社,2008.
[3]郭庆鼎,孙宜标,王丽梅.现代永磁电动机交流伺服系统[M].北京:中国电力出版社,2006.
[4]刘陵顺,高艳丽,张树团.TMS320F28335 DSP原理与开发编程[M].北京:北京航空航天大学出版社,2011.
[5]石燕宏,金元浩,闫士杰.Clarke和 Park变换在 DSP上的实现[J].基础自动化.2007(2):14-16.
[6]埃里斯.控制系统设计指南[M].刘君华,汤晓君,译.北京:电子工业出版社,2006.
[7]德克萨斯仪器公司.TI DSP/BIOS用户手册与驱动开发[M].王军宁,何迪,马娟,译.北京:清华大学出版社,2007.
Research of SVPWM based on TMS320F28335
HUANG Jia-han
(College of Electronic and Information Engineering,Tongji University,Shanghai 200092,China)
Using the mathematical methods to calculate the pulse width at different sectors by the principle of Space Vector Pulse Width Modulation(SPWM),at the same time,the method of how to determine the sector is also given.Because of the principle is simple and no trigonometric function calculation,so the programming is simple can effectively reduce the running time on the system.Using these principles has three groups of complementary symmetry by ePWM modules on TMS320F28335 to control Permanent Magnet Synchronous Motor(PMSM).And using dead-band submodule and Trip-Zone submodule to ensure the reliability and security of system.
servo;SVPWM;PMSM;DSP
TN492
A
1674-6236(2016)18-0169-03
2015-04-07 稿件编号:201504048
黄家晗(1984—),男,浙江宁波人,硕士研究生。研究方向:伺服控制技术。