基于视觉的四旋翼直升机目标跟踪技术研究
2016-11-25孙一力甄子洋王新华
孙一力,甄子洋,王新华
(南京航空航天大学 江苏 南京 211106)
基于视觉的四旋翼直升机目标跟踪技术研究
孙一力,甄子洋,王新华
(南京航空航天大学 江苏 南京 211106)
针对四旋翼直升机目标跟踪这一问题,提出并设计了一套基于视觉的四旋翼直升机系统和方法。首先,在Matlab中对四旋翼直升机建模仿真,使用经典PID控制算法设计位置回路和姿态回路;其次,设计了一套基于视觉的四旋翼直升机硬件系统,主要包括飞行控制模块、机载视觉模块等;最后,针对上述硬件,设计了四旋翼直升机的软件系统,实现了基于视觉的目标识别及跟踪控制方法。通过多次飞行实验验证了该方法的可行性,表明该方法可以很好的解决多旋翼直升机目标跟踪这一问题。
四旋翼直升机;飞行控制;计算机视觉;目标跟踪
多旋翼直升机是一种结构简单、可垂直起降、易于控制的无人飞行器。近年来,随着无人机技术的发展,多旋翼直升机的应用范围不断扩大,深入到如森林防火、电力巡检、难民搜救等领域中。由于人类从外界获取的信息中,有80%左右是通过视觉获得的[2],因此具有视觉功能的多旋翼直升机成为了其发展的主要趋势。
在无人机视觉导航方面,欧美一直处于世界的领先地位。文献[3]和[4]中,都提出了一种可以实现无人机跟踪移动目标并降落的机载无人视觉方法。在国内,许多高校也针对基于计算机视觉的无人机目标跟踪技术进行了研究。北京航空航天大学[5]提出了一种提出了一种面向无人机视频影像的目标特征跟踪模型,获得良好跟踪效果的同时可满足实时处理要求。西北工业大学[6]针对无人机由于受机载摄像条件及数据传输时延等因素,造成跟踪结果实时性不高、目标被遮挡时易丢失的问题,提出一种基于M-APF(Meanshift-Auxiliary Particle Filter)的无人机运动目标跟踪算法。以上文献中提到的方法虽然都实现了基于视觉的目标跟踪,但均未搭载在真实的无人机上进行试飞试验。
文中给出了一种基于视觉的四旋翼直升机目标跟踪的方法,针对四旋翼直升机建模仿真,使用经典的PID控制算法设计位置回路和姿态回路,并设计了一套用于实际试飞的软硬件平台和快速捕捉运动目标的图像处理算法,进行了试飞试验。实验结果验证了方案的可行性,表明以上方法能够很好地实现多旋翼直升机对移动目标的跟踪。
1 建模与控制律设计
1.1 动力学建模
为能够准确的描述无人机的运动状态,如姿态角、飞行速率、飞行航点等数据信息,首先要建立适当的坐标系,以作为描述以上数据信息提供唯一的依据。通常,在飞行控制系统中使用地面坐标系和机体坐标系两种坐标系,如图1所示。
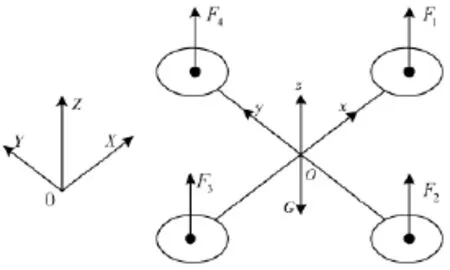
图1 四旋翼飞行器的结构模型
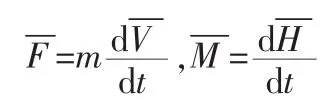
由牛顿第二定律可得,四旋翼无人机的动力学方程可表达为以下向量形式:
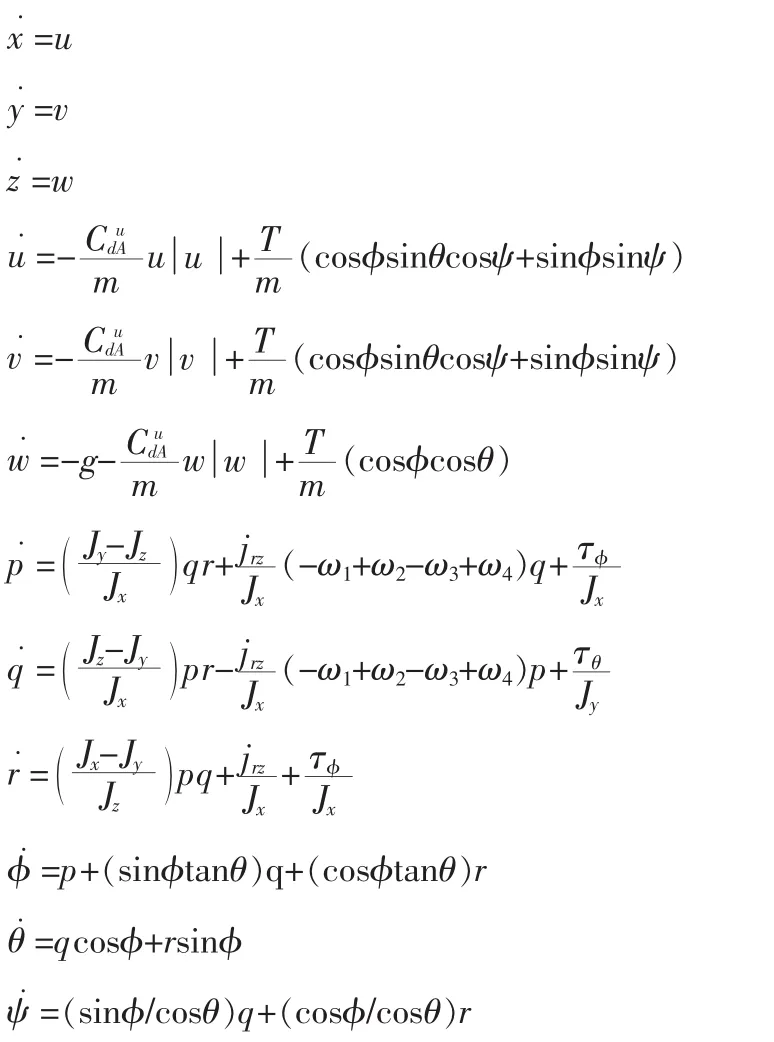
考虑到嵌入式控制系统的实际控制需要,将模型简化后,可认为无人机受到的力和力矩包括旋翼升力、重力、反扭矩、陀螺效应等,并且认为升力系数是常数。整理可得四旋翼直升机的数学模型如下:
1.2 四旋翼控制律设计
经典的PID控制是在实际工程中应用最广泛的一种方法,它具有简单易实现、适用范围广、鲁棒性能好等优点。本文在以上所设计的四旋翼直升机模型的基础上,分别针对姿态控制回路、位置控制回路设计了基于PID的控制律算法。
四旋翼直升机系统的控制结构框图如图2所示。
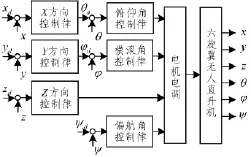
图2 控制结构框图
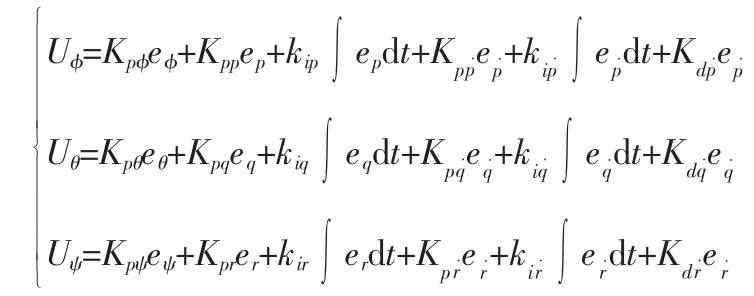
1.2.1 姿态回路控制律设计
姿态回路的设计关键是使四旋翼直升机的飞行姿态能够与期望的姿态保持一致,即滚转角、俯仰角和偏航角均与期望值一致。由于去掉了各个通道之间的耦合影响,故针对四旋翼直升机姿态回路中的三个通道分别控制律进行设计。定义[φd,ψd,θd]T为期望的姿态角,[φ,ψ,θ]T为实际测量的姿态角,[p,q,r]T为实际测量的姿态角速度,为实际测量的姿态角加速度,设计的控制量为
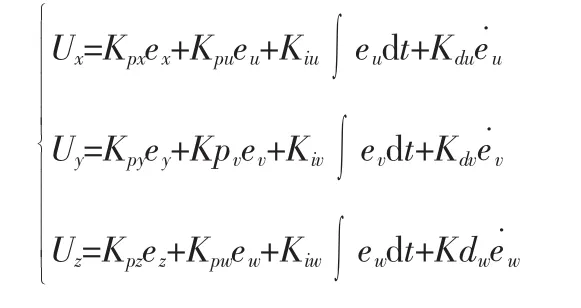
1.2.2 位置回路控制率设计
同理,位置回路的设计关键是使四旋翼直升机各个方向的位移量与期望的位移量保持一致。分别针对四旋翼直升机位置回路中的三个通道分别控制律进行设计。定义为期望的位置信息,为实际测量的位置信息,为实际测量的速度信息,设计的控制量为:
2 四旋翼直升机硬件结构设计
2.1 基本机构
四旋翼无人直升机的硬件模块可以分为主控模块、电源模块、传感器模块、视觉导航模块、无线通信模块和执行机构模块。如图3所示,为四旋翼无人直升机飞行控制系统硬件结构框图。
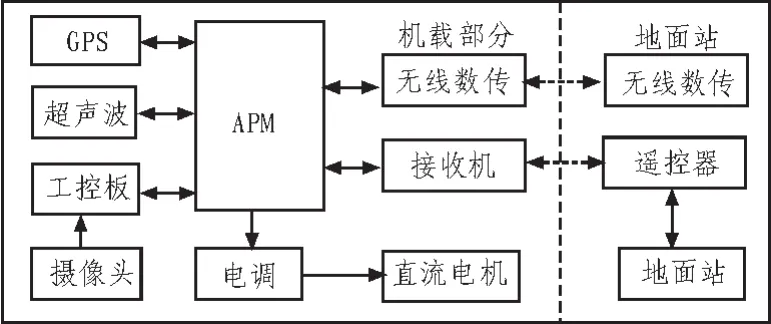
图3 飞控系统原理框图
2.2 传感器选型
具体的硬件选型是由性能要求和经费限制等因素决定。本文选用ArduPilotMega(APM)作为飞控系统,其具有开源的飞行控制程序,还集成了多种飞控系统所必须的传感器。传感器模块主要是选取合适的传感器型号,能够较为精准地采集到的需要的信息。无线通信模块采用与APM飞控配套的3DR数传模块,传输频率为433 MHz,室外最大传输距离为700 m,使用UART接口输出数据。电源模块的设计主要考虑以下因素:输入电压范围、最大输入电流和功率,输出电压的功率和种类,除此之外,还应考虑电磁干扰、纹波、体积和成本等因素。动力器件的选型主要取决于对多旋翼的最大载重能力、续航时间与机动性的要求。
3 四旋翼直升机软件结构设计
3.1 飞控软件设计
四旋翼无人直升机的软件模块可以分为系统硬件初始化模块、数据采集模块、控制解算模块、无线通信模块和电机控制模块。初始的飞行控制软件的总体流程如图4所示。其执行周期为10 ms,完成数据读取、数据解算、计算PID输出量、设置PWM输出等任务。
3.2 视觉识别及跟踪设计
目标的识别及跟踪采用计算机视觉的方法,主要包括图像获取、图像识别和目标定位3个部分。本文所选用的目标特征图案设计为红色的凸型,如图3所示。基于以上的特征图案,本文采用一种基于颜色和形状特征的快速识别动态目标算法,首先捕捉指定的颜色,然后对特征图案进行匹配,最终获得目标的运动信息,图像处理的流程图如图4所示。该图像处理是基于开源的图像处理库函数OPENCV实现的。

图4 飞行控制软件总体流程图
4 实验结果及分析
针对以上提出的基于视觉的四旋翼直升机目标跟踪的方法,本文进行了实际飞行验证。实验中采用SkyKnight X4-700模型四旋翼直升机,移动目标如图5所示。实验时,为了保证摄像头始终朝下且不受机体运动的影响,将其安装在两轴云台上。假设摄像头的坐标系原点与机体坐标系的原点重合,即视野坐标系的XY轴与机体XY轴重合。
图7给出了实际飞行时四旋翼直升机与机器人之间的相对误差曲线。
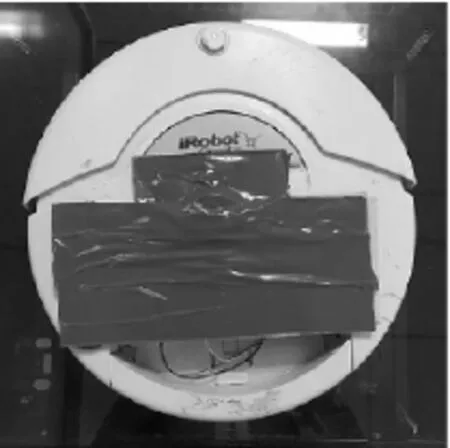
图5 目标及特征图案
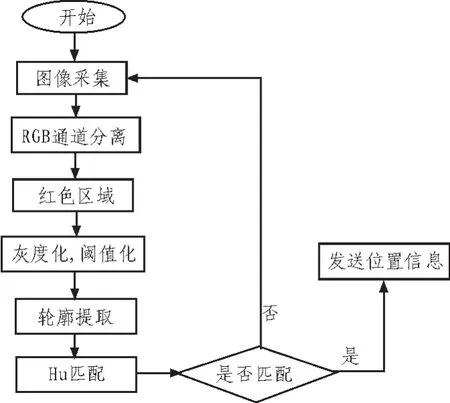
图6 图像处理算法流程图
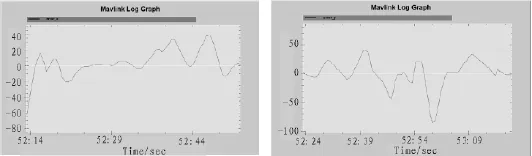
图7 相对误差曲线
首先,通过该图可以看出,系统的动态响应很快,稳定后有稳态误差,但不会发散。其次,该曲线的误差范围在范围内,但实际跟踪效果却好。分析原因,曲线误差无法减小的原因有以下几点视觉处理模块与飞控系统之间的传递延时、视觉处理模块坐标转换时存在误差等。实验表明基于机器视觉视觉引导的小型无人直升机跟踪移动目标可以很好的实现,验证了其工程实现的可行性。
5结 论
文中实现了基于视觉的四旋翼直升机目标跟踪,从整体方案设计到具体实现给出了较为详细的过程。针对四旋翼直升机建模仿真,使用经典的PID控制算法设计位置回路和姿态回路,并设计了一套用于实际试飞的软硬件平台和快速捕捉运动目标的图像处理算法,进行了试飞试验。实验结果验证了方案的可行性,表明以上方法能够很好地实现多旋翼直升机对移动目标的跟踪。本文提出的基于视觉的四旋翼直升机目标跟踪的方法,不仅验证了多旋翼直升机目标跟踪工程上的可行性,并且为实现移动平台降落打下基础。
[1]陈琦.四旋翼无人直升机先进飞行控制方法及实现研究[D].南京:南京航空航天大学,2013.[2]朱伟.基于视觉的四旋翼飞行器目标识别及跟踪[D].南京南京航空航天大学,2014.
[3]Choi Jay Hyuk,Lee Won-Suk,Bang Hyochoong.Helicopter guidance for vision-based tracking and landing on a moving ground target[C].International Conference on Control,Automation and Systems,2011:867-872.
[4]Sconyers Christopher,RaptisIoannis A,VachtsevanosGeorge J.Rotorcraft control and trajectory generation for target tracking[C].Mediterranean Conference on Control and Automation.2011:1235-1240.
[5]张辰,赵红颖,钱旭.面向无人机影像的目标特征跟踪方法研究[J].红外技术,2015,37(3):224-229.
[6]席庆彪,董阳霞,刘慧霞.一种基于M-APF的实时UAV目标跟踪算法[J].系统仿真学报,2014,26(1):107-118.
Quad-rotor helicopter target tracking based on computer vision
SUN Yi-li,ZHEN Zi-yang,WANG Xin-hua
(Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China)
It is difficult for quad-rotor helicopter to track a target.In this paper,we had a research on the quad-rotor helicopter tracking target based on the computer vision.Firstly,a dynamic model of quadrotor was developed,and a PID controller was designed based on the model.Secondly,the hardware of quad-rotor helicopter was designed,including flight control module and onboard vision module.Finally,the software of quad-rotor helicopter based on computer vision was designed,which made the target tracking based on computer vision was completed.The feasibility was verified during lots of experiments.The results indicated that our technology could be well applied to track target for the quad-rotor helicopter.
quad-rotor helicopter;flight control;computer vision;target tracking
TN108.4
A
1674-6236(2016)18-0159-03
2015-09-26 稿件编号:201509182
江苏省研究生培养创新工程(SJLX_0136)
孙一力(1990—),女,山西太原人,硕士研究生。研究方向:多旋翼无人视觉追踪和控制算法研究等。