西安地铁一号线车辆智能司机控制器测试台装置
2016-11-25史富强
史富强
(陕西交通职业技术学院 陕西 西安 710018)
西安地铁一号线车辆智能司机控制器测试台装置
史富强
(陕西交通职业技术学院 陕西 西安 710018)
文中首先分析西安地铁一号线司机控制器的工作原理,然后对司机控制器闭合表的逻辑关系进行分析;并根据西安地铁一号线车辆司机控制器现场技术检测的需要设计出一款能进行数据采集、检测的智能型测试台装置;最后对测试台的现场应用性能做出客观评价。
西安地铁一号车辆;司机控制器;性能参数;智能型;测试台装置
司机控制器是操纵地铁列车运行的主令电器,可实现列车牵引、制动、惰行工况,直接影响列车操纵平稳性和各种工况的实现。西安地铁一号线司机控制器包括主控手柄、换向手柄、钥匙开关和警惕按钮开关按钮;主控手柄可控制列车的牵引、制动和惰行工况;换向手柄可以改变列车的牵引方式。目前对司机控制器检测使用万用表“通断”功能结合图纸判断档位的闭合,检测效率低下,错误率高,急需研发一款智能司机控制器测试台[1]。
1 司控器的工作原理
司控器操作时必须先插入司机钥匙并打开到运行位置(ON位),取消司控器的机械联锁,才能实现对方向手柄和主控手柄操作。如图1所示为西安地铁一号线车辆司控器钥匙开关闭合表。
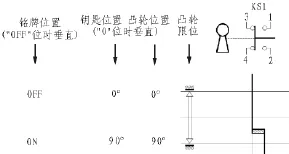
图1 司机控制器钥匙开关闭合表
钥匙开关是由5个速动开关触点构成,分别是KS1、KS2、KS3、KS4和KS5。当钥匙处于ON位时,5个速动开关的1、2端闭合,解除司机控制器的机械连锁[2]。
换向手柄由7个速动开关构成,分别是REV1、REV2、REV3、REV4、REV5、REV6和REV7。当换向手柄处于不同的位置(F、0、R)时,在棘轮的作用下7个速动开关有不同的逻辑闭合,闭合的速动开关可将DC110 V电压输送到中央处理平台进行电信号采集,从而判断列车的牵引模式[3]。
主控手柄是由11个速动开关构成,分别是MC1、MC2、MC3、MC4、MC5、MC6、MC7、MC8、MC9、MC10、MC11、MC12、MC13和MC14。主控手柄和方向手柄工作类似,都是通过DC110 V电信号的通断来判断档位。牵引位时,启动电路牵引接触器,主控手柄位置的变化实现牵引最小功率到最大功率的变化,实现列车速度控制。制动位时,启动电路制动接触器,制动力可在最小值和最大值之间变化,实现列车的制动减速。零位时,列车的牵引和制动力矩为零。司机控制器主控手柄拉到最下端FB位为紧急制动位,进入紧急制动状态。主控器手柄还装有警惕按钮,如果司机在紧急状况失去了对手柄的控制,警惕按钮将转到OFF位,在限定时间内未再次按压,将发出报警提示,再经过 3 s后启动紧急制动[4]。
2 测试台检测系统原理
设计的测试台将采用“上位机+下位机”架构。“下位机”是主控制部分,微处理器选用ATMEL公司的ATmaga 128L芯片,使用位移芯片74HC164/74HC165扩展微处理器I/O口,具有多通道开关量输入输出功能,能够完成对司机控制器所有触电的实时检测,并通过程序的判断,显示最终的逻辑结果[5]。硬件系统架构如图2所示。

图2 硬件系统框图
司机控制器测试台的硬件以上位机工控屏为核心,以MODBUS RTU为通讯方式,和下位机进行数据交换。上位机工控屏供电电压DC24 V,使用WEINVIEW公司专业的设计软件EBproV500进行友好的上位机界面设计。上位机程序会根据通讯协议将使用到的寄存器按报文下发,每一条报文包括3部分:报文头(站址、命令码和字节数)、数据和检验码。因此,在MUDBUS协议的报文中,每帧包括11位:1个起始位、1个校验位、1个停止位和8个数据位。需要注意的是在RTU模式下,报文发送至少要以3.5个字符时间的停顿间隔开始。下位机硬件部分包括电源系统、数据采集系统、CPU最小系统、数据移位系统和通讯系统[6]。
由于司控器测试台大多在实验室、检修室和地面进行检测,工作电压为AC220 V。通过各级电源电路,会分别产生DC24 V和DC5 V的工作电压。DC24 V电压将提供上位机工控屏和闭合测试支路上的工作电压,DC5 V将提供ATmaga 128L和位移芯片74HC164/74HC165的工作电压。
数据移位系统由74HC164/74HC165 8位移位寄存器组成,其中74HC164构成了信号控制回路,74HC165构成了信号采集回路。48路数字量信号各需6块移位芯片构成级联模式,最终由微处理器发送相应指令控制I/O口的电平高低[7]。单片机ATmaga 128L的PA0管脚为信号控制的数据脚,PA2为时钟脚。PA0数据通过位移芯片74HC164并出8位控制信号,通过级联方式,6块74HC164控制着48路“释能电路”支路。位移芯片74HC164的每一路控制信号通过限流电阻控制 “释能电路”中三极管的基级。当控制信号为高电平时,三极管导通,1P1处为低电平;当控制信号为低电平时,三极管关断,1P1处为高电平。此处的反逻辑设计更好保证了系统的抗干扰能力。控制信号控制“释能电路”[8]原理如图3所示。位移芯片74HC165实现了数据的采集,74HC165采集到的电压需小于DC5 V,因此在1P1和信号地之间接有稳压二极管1N4733,同时增加了RC充放电路,保障了采集到的信号更加稳定、可靠。

图3 控制信号控制释能电路原理
3 测试台系统软件设计
司机控制器测试台软件包括两部分,分别是下位机控制软件和上位机软件。下面分别介绍两种软件的设计思路[9]。
下位机控制软件使用高级语言C语言编写,通过接收上位机软件发送下来的指令,控制微处理器进行相应操作,根据司机控制器操作的逻辑关系和闭合关系,编写相应司机控制器档位的判断程序,经过实时采集上来的数据与理论值进行比较,将每个触点的结果以报文的形式发送给上位机进行显示。若某一结果错误,同时驱动报警电路,提醒检测人员记录错误信息[10]。下位机控制软件流程图如图4所示。
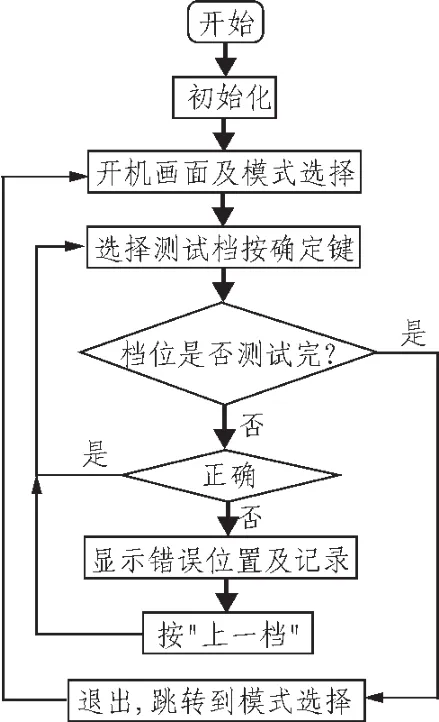
图4 下位机控制软件流程图
程序中驱动74HC164的代码如下:
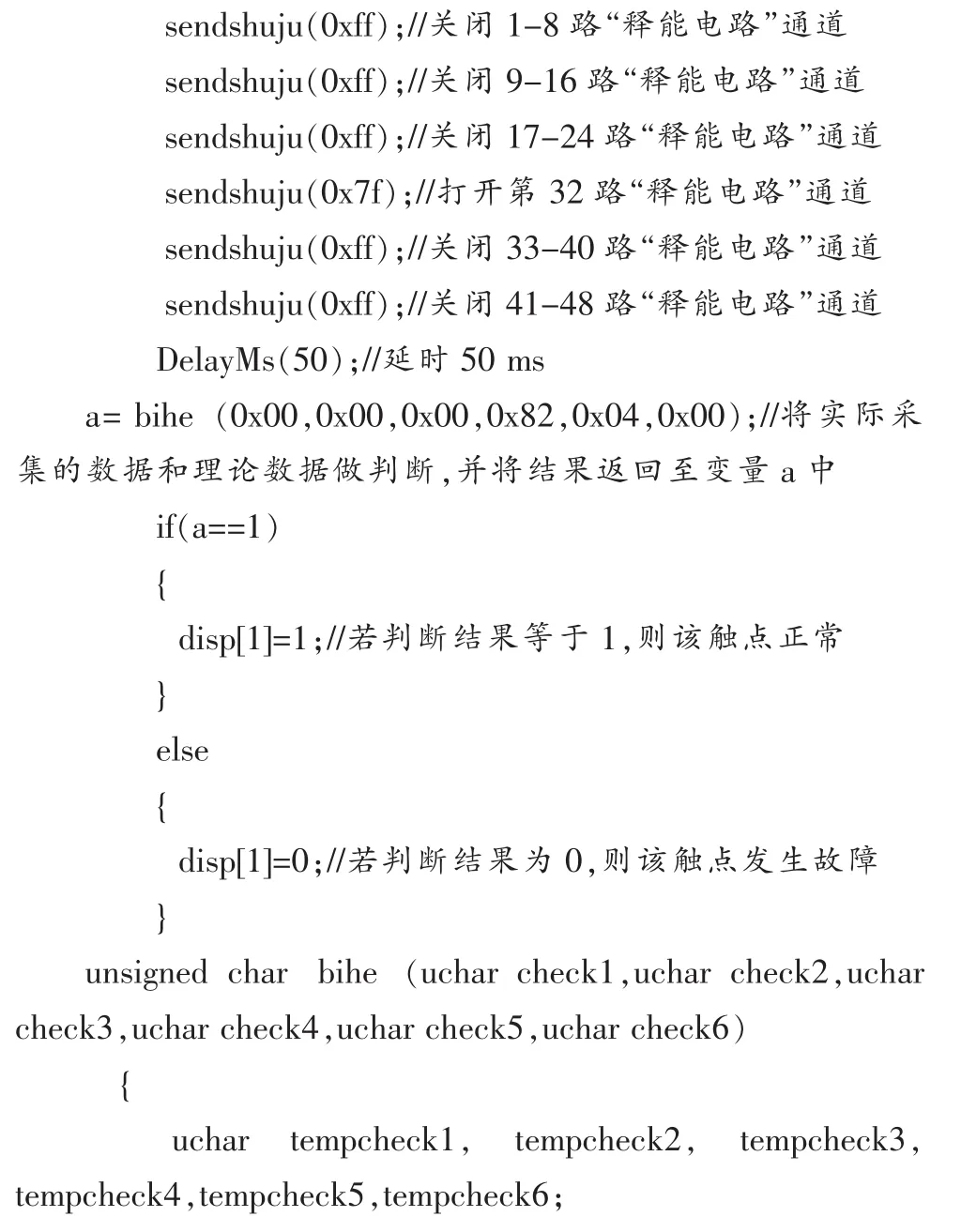
上述程序完成了一条检测电路的驱动过程,其中void sendshuju()函数作用是将单片机PA0端口中的数据通过位移芯片74HC164将数据依次发送出去。void sendshuju()函数的作用是读取每一条支路上采集的电压信号[11]。
上位机使用了以安全、可靠性著称的触摸式工业控制屏MT6071iE,前面板防护级别为IP65,支持USB数据下载上传功能。上位机程序需要在EasyBuilder Pro编写环境中进行,负责将检测人员的信息下发给下位机,控制数据采集[1];并接收下位机上传上来的数据进行分析、显示。将错误的信息存储在配方地址中,自动生成EXCEL文档格式用于查看和下载。
地铁车辆智能司机控制器测试台上位机软件编写了两种检测模式,一种为司机控制器手柄档位检测;一种为速动开关纠错检测。其中司机控制器“手柄档位检测”可以快速完成对一台司机控制器的测试,只显示该档位的最终结果。而“速动开关纠错检测”可以对司机控制器进行详细的检测,可以看到内部每一个触点的动作情况,方便技术人员进行查错纠错。
“记录查看”功能可以查看以往对司机控制器测试过程中记录的错误信息,并可以通过USB下载至电脑,进行数据统计。上位机界面如图5所示。
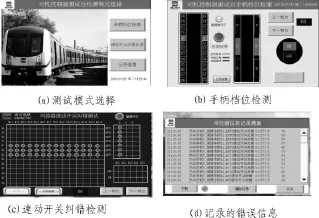
图5 上位机界面
4 测试过程及步骤
根据西安地下铁道运营分公司车辆部检修车间检修司机控制器的方法,首先接通司机控制器测试台电源,打开软件系统的测试主界面。用连接线将司机控制器和测试台可靠连接。插入司机钥匙,根据软件提示进行相应操作[1],观察软件界面中的该位置速动开关是否正确。待司机控制器测试完成后,会弹回到主测试界面。同时,测试的数据自动存入了上位机工控屏中,以便查看。测试后,上位机电脑会自动切除供电电源,断开司机控制器和测试台的连接线,将主控手柄和方向手柄回复零位,钥匙开关恢复“OFF”位置。关闭司机控制器电源。
5 结束语
地铁车辆智能司机控制器测试台统集测量、信号采集、通信、程序开发、数据存储等于一体,全自动检测大大提升了效率和可靠性。通过对西安地铁运行分公司车辆维修过程中司机控制器的测试,验证了本系统硬件、软件设计合理,可以满足西安地铁车辆司机控制器的性能检测要求[12]。
[1]西安市地下铁道有限责任公司.西安地铁一号线车辆合同文件[G].西安:西安市地下铁道有限责任公司,2010.
[2]袁虎林.深圳地铁3号线车辆司机控制器试验装置的研制[J].城市轨道交通研究,2013(9):20-21.
[3]史富强,西安地铁2号线电动客车HRDA制动系统[J].电子设计工程,2011(1):12-14.
[4]史富强.西安地铁1号线车辆EP2002制动系统[J].电子设计工程,2011(1):27-30.
[5]唐明安.通用型司机控制器测试装置[J].机车电传动,2006,(6):58-60.
[6]唐尧福.司机控制器的故障分析与处理[J].电力机车技术,2002(2):39-40.
[7]匡如华.EP2002制动系统及其在城轨车上的应用[J].机车电传动,2009(3):45-48.
[8]周志辉.广州地铁3号线电动车组的制动控制[J].电力机车与城轨车辆,2004(4):14-17.
[9]朱翔.广州地铁3号线列车EP2002制动系统及故障分析[J].机车电传动,2008(3):58-59.
[10]史富强.KAX-1型车载安全监测诊断系统应用研究[J].电子设计工程,2011(1):112-114.
[11]农兴中.广州地铁3号线最高行车速度选取分析[J].城市轨道交通,2002(10):42-44.
[12]陶功安,袁立祥,马喜成.广州地铁3号线地铁车辆[J].机车电传动,2006(4):53-55.
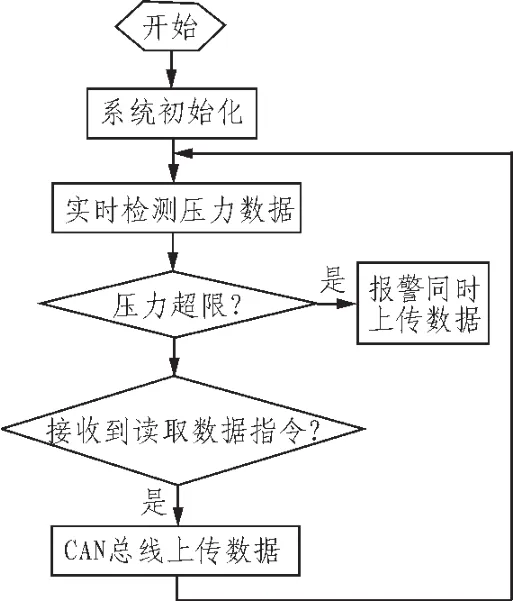
图7 软件流程图
4结论
基于CAN总线的压力传感器的设计,能够较好的检测井下的压力数据,能够实时掌握井下压力是否超标等信息,通过CAN总线进行传输,具有传输距离远、稳定可靠和抗干扰能力强的优势,与传统的RS485总线和频率信号传输方式相比,CAN总线接入节点多,传输距离远,通信可靠等优点,适合于构建井下监控系统网络。通过实际测试和老化实验,基于CAN总线的压力传感器检测井下压力实时性强,能够准确的根据压力变化进行声光报警,CAN总线传输距离超过5 km,传感器运行稳定可靠,能够达到监控系统中压力传感器的设计要求。
参考文献:
[1]张斌.采用TLC2652的高精度放大器[J].电子产品世界,2003(13):39-40.
[2]许永植,滕军.传感器系统的误差差动补偿技术[J].国外建材科技,2004,25(5):71-74.
[3]曾涌泉,王勇,植涌.基于ARM和CAN总线的数据采集系统设计[J].单片机嵌入式系统应用,2008(11):38-40.
[4]Yiu J.The definitive guide to the ARM Cortex-M3[M].2ed.[S.-1.]:Newnes,2009.
[5]LovedayPW,RogersCA.The influence of control system design on the performance of vibratory gyroscope[J].Journal of Sound and Vibration,2002,255(3):417-432.
[6]敖文纲.基于TLC2252ID的多路温度高选变送器系统设计[J].电子设计工程,2008(9):28.
[7]孙友明,黄秉鍊,罗晓曙.新型脑电信号放大检测电路的设计[J].电子设计工程,2006(9):58.
Test bench for intelligent driver controller of vehicle in Xi'an Metro Line ONE
SHI Fu-qiang
(Shaanxi College of Communication Technology,Xi'an 710018,China)
This paper first analyzes the work principle of the Xi'an metro line driver controller,and then analyzes the logic relationship of the controller.According to the needs of the Xi'an Metro Line 1,the intelligent test bench for data acquisition and detection is designed.
Xi'an metro vehicle;driver controller;performance parameter;intelligent;test bench
TN05
A
1674-6236(2016)18-0075-04
2015-10-15 稿件编号:201510096
陕西省教育厅专项科研项目(16JK1069)
史富强(1971—),男,陕西扶风人,硕士,副教授。研究方向:轨道车辆技术的研究与教学工作。