四桥臂有源滤波器零序电流解耦预测电流控制
2016-11-25王晓刚
王晓刚,张 杰
(广州大学机械与电气工程学院,广东 广州 510006)
四桥臂有源滤波器零序电流解耦预测电流控制
王晓刚,张 杰
(广州大学机械与电气工程学院,广东 广州 510006)
针对应用于三相四线制系统中的三相四桥臂有源电力滤波器的特点,研究了一种基于零序电流解耦的预测电流控制方法,分析了零序电流解耦的原理,设计了控制系统.该方法有效地解除了第四桥臂和前三桥臂的耦合,对中线电流进行独立补偿,与三相三桥臂的控制方法兼容,简单易行,易于对三桥臂有源电力滤波器进行改造后应用于三相四线系统.仿真分析表明,与其他方法相比,基于零序电流解耦的预测电流控制可使有源电力滤波器获得更好的补偿性能,电源电流总谐波畸变率和中线电流正负峰值均达到最小.
有源电力滤波器;四桥臂;零序电流;解耦
在民用和工业供电系统中,三相四线制系统得到广泛应用,大量单相非线性负载的使用使电网电流含有大量的谐波,且负载的不平衡使中线流过三相零序电流之和.因此,必须对谐波和中线电流进行补偿,有源电力滤波器(APF)是补偿谐波的有效手段,在三相四线制系统中,常用的APF拓扑结构包括电容中分结构的三相三桥臂变流器[1-3]和三相四桥臂变流器[4-8],前者虽然使用的器件少但直流侧2个电容的电压需进行均压控制;后者虽然比前者多用了2个器件但直流侧电压控制简单,第四桥臂的存在增加了控制的灵活性,可以对其独立控制,控制上相对简单,是补偿三相四线制系统谐波的理想方案.
在目前的三相四桥臂APF电流控制策略中,有些在第四桥臂与系统间使用了连接电抗,有些则未使用,有一定随意性.实际上,第四桥臂的存在是四桥臂APF最突出的特点,如何将其与系统连接并进行控制是不容忽视的问题.文献[9-11]提出了几种四桥臂APF的解耦控制方法.本文分析了现有的3种补偿方案的优劣,讨论了第四桥臂和前三桥臂间的耦合关系,深入研究了基于零序电流解耦的预测电流控制方法,指出采用零序电流解耦控制可以获得更好的补偿性能,并且易于将三桥臂APF改造为四桥臂APF,为第四桥臂的使用提供了指导.通过仿真比较了3种方案的补偿特性.结果表明,基于零序电流解耦的预测电流控制具有最佳补偿性能.
1 四桥臂有源电力滤波器工作原理
三相四桥臂有源电力滤波器的工作原理见图1.S1~S6构成前三桥臂,它们和系统三相间的连接电抗为L,S7、S8构成第四桥臂,它和系统中线间的连接电抗为Ln,在不同的补偿方案中Ln可有可无.APF的工作原理:实时检测出三相非线性负载的畸变电流,由有源电力滤波器输出补偿电流抵消畸变分量,使电源电流为与电压同相的正弦波.即有如下关系成立:

式中,is为电源电流和电源侧中线电流,is=[isa,isb,isc,is0]T;iLh为负载畸变电流和负载侧中线电流,iLh=[iLha,iLhb,iLhc,iL0]T;ic是APF输出的补偿电流,ic=[ica,icb,icc,-icn]T.
三相四桥臂有源滤波器和三相三桥臂有源滤波器的最重要区别是第四桥臂可以对中线电流进行补偿,目前常见的四桥臂有源滤波器补偿方案有以下3种:
方案Ⅰ:第四桥臂不加连接电抗,检测出包含零序电流的负载电流畸变分量作为参考补偿电流利用其计算出指令电压后,再使用三维电压空间矢量脉宽调制(3D-SVPWM)得出8路开关信号.
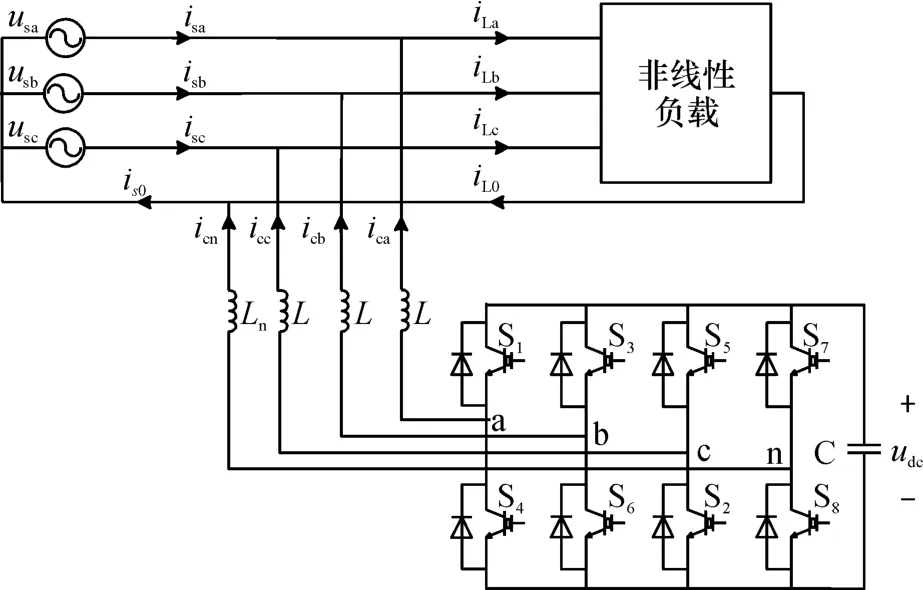
图1 三相四桥臂有源电力滤波器主电路Fig.1 Main circuit of three-phase four-leg active power filter
方案Ⅱ:第四桥臂添加连接电抗,其它与方案I相同.
方案Ⅲ:即零序电流解耦控制.除了得出前三相参考补偿电流外,还单独检测出负载电流的零序电流之和,反极性后作为第四桥臂的指令信号,即第四桥臂和前三桥臂分开控制,对中线零序电流的补偿进行独立控制,此方案必须使用连接电抗.
方案Ⅰ和Ⅱ将四桥臂APF作为一个整体来控制,与三桥臂APF的控制有很大不同,且3D-SVPWM较复杂,增加了处理器的计算时间,不能和三桥臂APF的控制通用.方案Ⅲ使各桥臂分工明确,但是,现有文献对第四桥臂的处理较简单,没有深入分析,第四桥臂输出的电流与前三桥臂的输出电流实际上存在耦合,解除耦合后单独控制可使补偿性能最佳.
2 基于零序电流解耦的预测电流控制
2.1 零序电流解耦
根据图1的拓扑,以a相为例,可画出如图2的等效电路图,图中O点为直流侧电压中点.
根据图2,可列出下列方程:
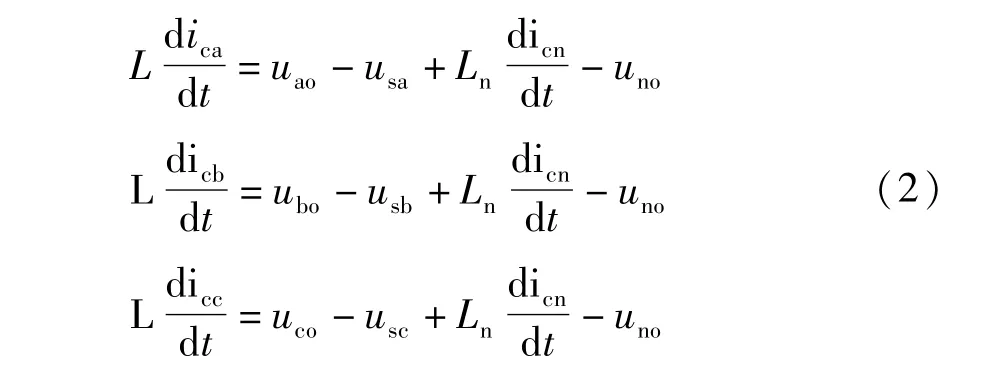
式中,uao,ubo,uco,uno为APF 4个桥臂输出的电压.
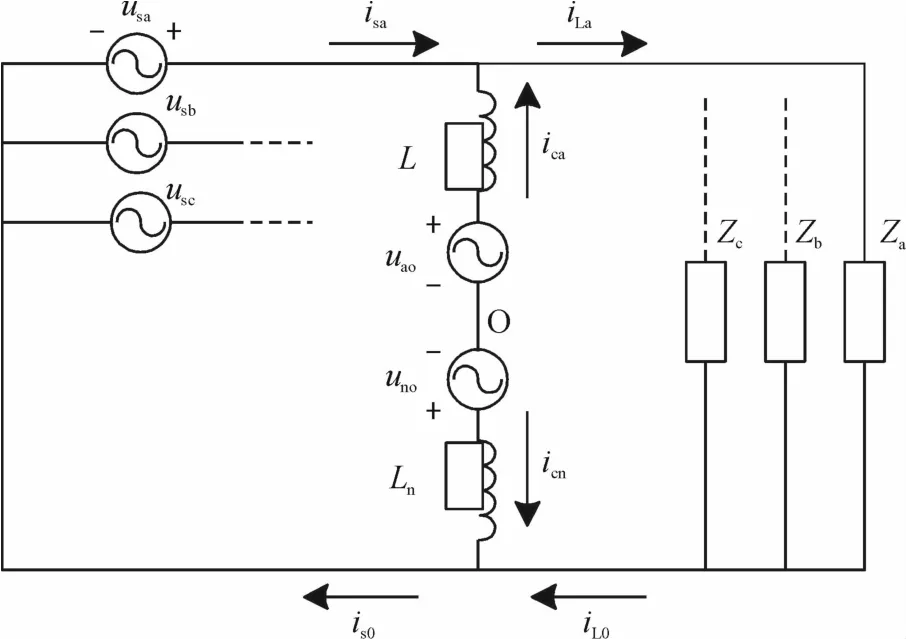
图2 APF a相等效电路Fig.2 The phase-a equivalent circuit of the fourth leg APF
设da,db,dc为前三桥臂的控制占空比,并假设三相电源电压平衡,当前三桥臂采用常规的三相三桥臂APF控制方法时,则有:

占空比由直流分量和交流分量构成,直流分量在输出中抵消,起作用的只有交流分量~da,~db,~dc,前3桥臂的输出电压uao,ubo,uco不含零序分量,只含有正序和负序分量,故将式(2)的3个方程相加得:

式中,iL0是负载电流的零序分量.对第四桥臂输出的电流进行控制,使下式成立:

将上式代入式(4)得:

再将式(6)代入方程(2)得:
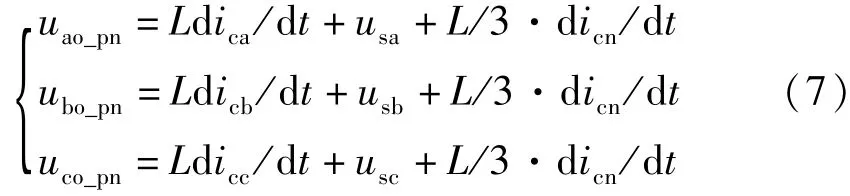
再结合式(5)得:

式中,uao_pn,ubo_pn,uco_pn即为只包含正序和负序分量的a,b,c桥臂输出的电压:分别为a,b,c桥臂输出补偿电流,它们也只包含正序和负序分量.
因此,由式(6)和方程(8)可见,4个桥臂有源电力滤波器的前三桥臂可以独立补偿正序和负序畸变电流,而第四桥臂则对零序电流进行补偿,即实现了第四桥臂与前三桥臂的解耦.这时,前三桥臂和第四桥臂的控制系统完全独立.这种解耦不仅有效地利用了第四桥臂,使其直接控制零序电流,可以达到更好的补偿效果;还可以很方便地将三相三桥臂有源电力滤波器改造为四桥臂有源电力滤波器,而无需改动原控制电路.前三桥臂的控制方法完全适用于第四桥臂的控制.
需要特别说明的是,虽然式(8)中的电流不包含零序分量,但是APF前三桥臂输出的电流一定包含零序分量,这是因为电源电流的零序分量被第四桥臂补偿,前三桥臂必然输出和负载零序电流相等的分量,只不过这个分量不是由前三桥臂控制系统直接控制的.
前三桥臂的控制系统需要电流指令值和实测值,这里探讨2种情况:
(1)前三桥臂由二维SVPWM产生控制信号.因为SVPWM要进行αβ变换,不含零序分量,所以无论指令电流和实测电流ica, icb,icc是否去除零序分量,控制效果都是一样的.
(2)前三桥臂由三角载波比较方式或滞环方式产生控制信号.此时,若指令电流包含零序分量,实测电流必须直接使用前三桥臂的输出电流;若指令电流不包含零序分量,实测电流也要去除零序分量后方能被控制器使用.
因此,在将三桥臂APF改造为四桥臂APF时,无论原系统采用何种检测方式和调制方式,都可以不改变原系统,直接设计第四桥臂的控制器.
下面分析方案Ⅰ和方案Ⅱ效果较差的原因.对于方案Ⅰ,由于中线电流是由前三桥臂共同补偿的,未有效利用第四桥臂,属于间接补偿,故效果不如解耦控制;对于方案Ⅱ,由式(2)可见,由于未考虑Lnd icn/d t项,即忽略了前三桥臂与第四桥臂的耦合,实际上造成了建模误差,补偿效果是3个方案中最差的.
为了说明零序电流解耦控制的优越性,本文以简单易实现的预测电流控制为例,来比较3种补偿策略.
2.2 预测电流控制
预测电流控制是一种数字化的控制方法,它利用信号预测技术估计出下一时刻的补偿电流,从而计算出有源电力滤波器下一时刻的参考电压,在下一时刻到来时立即输出,补偿了由采样和计算造成的延时.
将APF方程离散化,对于前3桥臂有:

式中,usj(j=a,b,c)为三相电网电压.对于第四桥臂有:

上述方程中要用到k+1时刻的电网电压和参考电流值,一般情况下,电网电压为理想正弦波,可采用简单的线性预测;而参考电流会发生突变,为了提高精度,可采用二阶拉格朗日外推预测.预测公式分别为

2.3 控制系统的实现
控制电路包括前三桥臂和第四桥臂2个独立部分.前三桥臂可采用传统三相三线有源电力滤波器的控制和调制方法,谐波检测电路检测出三相畸变电流后,就得到了前三相的参考电流.而三相电流之和反向后即可作为第四桥臂的参考电流.图3为前三桥臂的控制系统框图,前三相参考电流、前三桥臂输出电流实测值及电源电压经式(9)计算得到k+1时刻的参考电压后,由二维空间矢量得到开关管S1~S6的6路控制信号;零序电流控制器见图4,零序参考电流和第四桥臂输出电流经式(10)计算后得到参考电压后与三角载波比较后得到第四桥臂开关管S7和S8的开关信号.
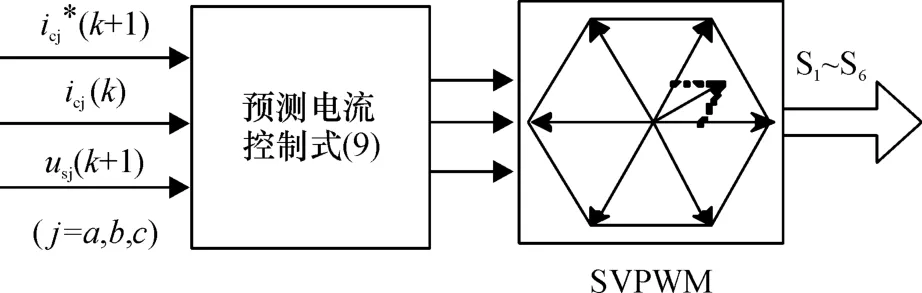
图3 正负序电流控制系统框图Fig.3 Block diagram of positive-sequence and negative-sequence currents control system
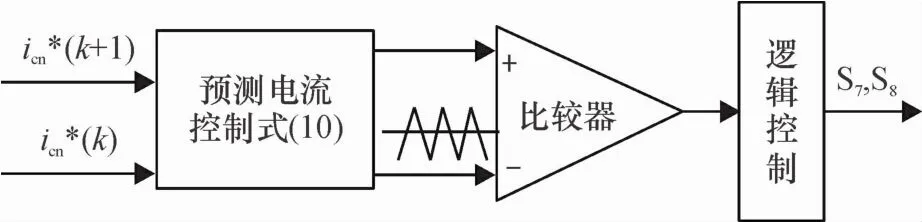
图4 零序电流控制系统框图Fig.4 Block diagram of zero-sequence current control system
3 仿真分析
为了验证所论述方法的正确性,利用Matlab/Simulink对基于上述3种方案的三相四桥臂有源电力滤波器预测电流控制方法进行了仿真研究.仿真系统参数:三相交流电源电压220 V,额定频率50 Hz,有源电力滤波器直流侧电压800 V,前三桥臂连接电抗5 mH,第四桥臂连接电抗5 mH,忽略电抗的等效电阻,控制系统的采样和开关频率均为10 kHz.三相不平衡负载采用3个单相带电容滤波的二极管整流桥,负载电阻的参数不同,三相分别为:10 Ω、20 Ω、20 Ω.图5所示为三相负载电流和中线电流,可见电流严重畸变且不平衡,中线电流较大.

图5 负载电流和中线电流波形Fig.5 Waveforms of load currents and neutral current
采用方案I进行补偿后的电源电流和中线电流波形见图6,电源电流所含谐波较大,三相电流的THD%分别为3.50%,3.50%和3.47%,中线电流正负峰值分别为+3.9A和-3.9A.

图6 采用方案I补偿后的电源电流和中线电流波形Fig.6 Supply currents and neutral current after compensation based on scheme I
采用方案II进行补偿后的电源电流和中线电流波形见图7,电源电流所含谐波较大,三相电流的THD%分别为5.62%,5.06%和5.15%,中线电流正负峰值分别为+5.8A和-5.8A.
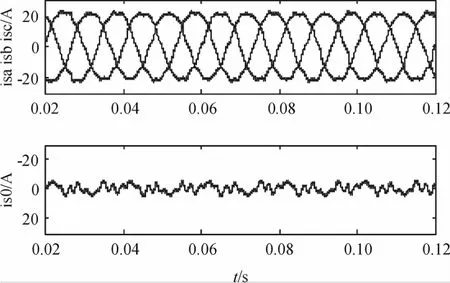
图7 采用方案II补偿后的电源电流和中线电流波形Fig.7 Supply currents and neutral current after compensation based on scheme II
采用零序电流解耦控制方案的有源电力滤波器进行补偿后,电源电流波形见图8,电源电流非常接近正弦,三相电流的THD%分别降为2.53%,2.93%和2.77%,中线电流正负峰值仅为+2.4A和-2.3A.中线残余电流大部分是由预测误差造成的.

图8 采用零序电流控制方案补偿后的电源电流和中线电流波形Fig.8 Supply currents and neutral current after compensation based on zero-sequence current decoupling control method
从结果可见,基于零序电流解耦控制的预测电流控制在3种补偿方案中补偿性能最佳.
4 结 论
本文针对三相四桥臂有源电力滤波器,对比了3种控制方案,分析了其输出电流之间的耦合关系,深入研究了基于零序电流解耦的预测电流控制方法,将正负序与零序畸变电流分开补偿.理论分析和仿真研究均表明,采用零序电流解耦控制的四桥臂有源电力滤波器不仅有效地利用了第四桥臂,突出了四桥臂APF的特点,实现简单,补偿效果优于非解耦的控制方法,而且可以很方便地将现有的三桥臂APF改造为四桥臂APF.本文的结论对第四桥臂的合理利用提供了理论指导.
[1] 郑丹,廖敏,刘振权,等.三相四线有源电力滤波器的三闭环控制策略[J].电力系统保护与控制,2014,11(16):95-99.ZHENG D,LIAO M,LIU Z Q,et al.Three closed loops control strategy of three-phase four-wire active power filter[J].Pow Syst Prot Contr,2014,11(16):95-99.
[2] 乐健,姜齐荣,韩英铎.三相四线并联APF的电流滞环控制策略分析[J].电力系统自动化,2006,30(17):70-75.LE J,JIANG Q R,HAN Y D.Analysis of hysteresis current control strategy of three-phase four-wire shunt APF[J].Autom Electr Pow Syst,2006,30(17):70-75.
[3] 曹毅,刘跃敏.一种新型三相四线制有源电力滤波器的设计[J].低压电器,2012(23):47-51.CAO Y,LIU Y M.Design of a new three-phase four-wire active power filter[J].Low Volt Appar,2012(23):47-51.
[4] 耿乙文,伍小杰,周德佳,等.基于改进型比例谐振控制器的三相四线制光伏发电和有源滤波器系统[J].电工技术学报,2013,28(8):142-148.GENG Y W,WU X J,ZHOU D J,et al.Research on three phase four wire PV-AF system based on improved proportional resonant controllers[J].Trans China Electr Soc,2013,28(8):142-148.
[5] KANAAN H Y,HAYEK A,AL-HADDAD K.Small-signal average modeling,simulation and carrier-based linear control of a three-phase four-leg shunt active power filter[C]∥IEEE Intern Electr Machines Driv Confer,Antal,Turk,2007.
[6] SAWANT R R,CHANDORKAR M C.A multifunctional four-leg grid-connected compensator[J].IEEE Trans Ind Appl,2009,45(1):249-259.
[7] KANAAN H Y,HAYEK A,AL-HADDAD K.Averaged-model-based nonlinear control of a PWM three-phase four-leg shunt active power filter[C]∥Canad Confer Electr Comput Engin,Vancouv,Canad,2007:1002-1005.
[8] LI Z,WAITE M J,CHONG B.Three-phase four-leg flying-capacitor multi-level inverter-based active power filter for unbalanced current operation[J].IET Pow Electr,2013,6(1):153-163.
[9] 史经丛,安琪,陈建宇.基于三电平3D-SVPWM的四桥臂有源电力滤波器[J].电力电子技术,2015,49(5):96-98.SHI J C,AN Q,CHEN J Y.Research on three-phase four-leg APF based on three-level 3D-SVPWM[J].Pow Electr,2015,49(5):96-98.
[10]周娟,张勇,耿乙文,等.四桥臂有源滤波器在静止坐标系下的改进PR控制[J].中国电机工程学报,2012,32(6):113-120.ZHOU J,ZHANG Y,GENG Y W,et al.An improved proportional resonant control strategy in the static coordinate for fourleg active power filters[J].Proceed CSEE,2012,32(6):113-120.
[11]ACUNA P,MORAN L,RIVERA M,et al.Improved active power filter performance for renewable power generation systems[J].IEEE Trans Pow Electr,2013,29(2):687-694.Zero-sequence current decoup ling control of three-phase four-w ire active power filter
WANG Xiao-gang,ZHANG Jie
(School of Mechanical and Electrical Engineering,Guangzhou University,Guangzhou 510006,China)
Zero-sequence current decoupling based predictive current control of three-phase four-wire active power filter(APF)is studied based on the characteristics of three-phase four-leg APF.The principle of zero-sequence decoupling is analyzed and the control system is designed.The control method eliminates the coupling between the first three legs and the fourth leg,and the neutral current is compensated independently.The method is compatible with the control of three-phase three-leg APF and is simple to implement.It is easy to upgrade the three-leg APF to meet the three-phase four wire applications.Simulation analyses show that zero-sequence current decoupling based predictive current control achieves better compensation performance than other methods,total harmonic distortion of supply currents and positive/negative amplitudes of neutral current are both with minimum.
active power filter;four-leg;zero-sequence current;decoupling
TP 29
A
1671-4229(2016)01-0075-05
【责任编辑:陈 钢】
2015-12-18;
2015-12-26
广东省科技计划资助项目(2015A010106015)
王晓刚(1976-),男,副教授,博士.E-mail:ieewxg@163.com