基于PLC的高空作业车自动调平控制系统
2016-11-24赵志华刘玉敏姚建红
赵志华 刘玉敏 姚建红
(东北石油大学电气信息工程学院,黑龙江 大庆 163318)
基于PLC的高空作业车自动调平控制系统
赵志华 刘玉敏 姚建红
(东北石油大学电气信息工程学院,黑龙江 大庆 163318)
以S7-200 PLC为主控器件,设计了一种高空作业车自动调平控制系统。给出系统的结构、工作原理、硬件组成、控制程序流程与梯形图。仿真结果表明:该系统实现了高空作业车自动调平、上升杆位移控制和作业平台上升速度控制的功能;作业平台水平倾角可消除水平误差,实现自动控制调平。
自动调平控制系统 高空作业车 PLC 上升杆位移控制 上升速度控制
高空作业车是用来运送工作人员和工作装备到指定高度进行作业的特种车辆,是将高空作业装置安装在汽车底盘上组成的,现广泛应用于船舶、建筑、消防及港口货运等行业中[1]。随着城市化进程的加快,城市电力、市政建设及装饰物等各种养护作业需要大量的高空作业装备,利用高空作业车可以大幅提高工作效率,所以高空作业平台有着广阔的发展前景。随着高空作业领域的不断扩展,对高空作业平台的操作平顺程度、工作稳定性、自动调速效果及安全可靠性等方面的要求也越来越高[2]。为此,笔者基于PLC设计了一套高空作业车自动调平控制系统,以实现高空作业车自动调平、上升杆位移控制和作业平台上升速度控制的功能,提高高空作业车的操作稳定性与可靠性。
1 系统的结构与工作原理
高空作业车自动调平控制系统(图1)采用闭环恒值控制。高空作业车的作业平台为被控对象,作业平台的水平倾斜角是被控量。比较元件和反馈元件为双轴倾角传感器,用于检测作业平台X轴(纵向)和Y轴(横向)的水平状态。支承作业平台的5个液压缸是执行机构,高空作业平台有5条支腿,分别用5个执行元件控制其高度,以调整平台的水平度,保证平台的稳定性。控制元件由安装在液压控制回路上的与支承作业平台液压缸相连的5个电磁阀组成。

图1 高空作业车自动调平控制系统结构框图
高空作业车自动调平控制系统的工作原理如图2所示。当系统进入自动调平程序后[3],双轴倾角传感器分别检测作业平台x轴和y轴方向的水平状态,并将检测信号传回PLC,然后将该信号与PLC中的给定值进行比较,当误差值超出允许值后,就会产生一个电信号,经放大电路传给PLC,PLC根据预先设定的调平程序输出控制信号,传给控制5个柱塞式支承油缸动作的电磁阀,阀相应地开启或关闭,支承油缸就会在油泵液压动力或车身重力的作用下,产生向上或向下的位移量,从而带动作业平台水平倾斜角向着相反的方向改变,实现自动消除水平误差的目的[4]。当误差信号达到指定的误差范围时,PLC发出停止命令。经过双轴倾角传感器的多次检测和PLC的控制调节,最终达到高空作业车车身自动调平的目的,且调平结束后保持此平衡稳定的状态。

图2 高空作业车自动调平控制系统的工作原理
2 系统硬件部分
高空作业车自动调平控制系统的硬件部分主要由S7-200 PLC、调平支腿、开始按钮、停止按钮、撤回按钮、位置开关、电磁阀及双轴倾角传感器等组成。
依据PLC型号和I/O分配表设计的系统外部接线[5]如图3所示,共有11个输入(启动、停止、撤回、各支腿的输入开关以及传感器的x轴和y轴模拟信号输入)和8个输出(各支腿上的电磁阀所对应的下降和撤回继电器)。

图3 高空作业车自动调平控制系统外部接线
3 系统软件部分
3.1系统程序流程
高空作业车自动调平工作流程如图4所示。先读入前、后腿倾斜角的值,若不符合精度要求则判断前、后腿的高低并通过电磁阀来进行调平,直到达到系统精度要求再继续执行其他程序;若x轴符合精度要求则继续读入左、右倾斜角值(即y轴方向上的倾斜角值)[6];若不符合精度要求则判断左、右支腿的高低并通过电磁阀对低支腿升高调平,直到达到系统要求再继续执行其他程序;若y轴方向的值符合精度要求则结束自动调平程序。

图4 高空作业车自动调平工作流程
图5为高空作业车位移控制流程,通过对高空作业车的一段、二段杠进行位移高度控制,保证高空作业车的作业平台与地面高度保持安全位置,实现位移的自动控制[7]。图6为高空作业车平台上升速度控制流程,通过对作业平台上升速度的控制可以有效避免速度不稳定带来的安全隐患。

图5 高空作业车位移控制流程
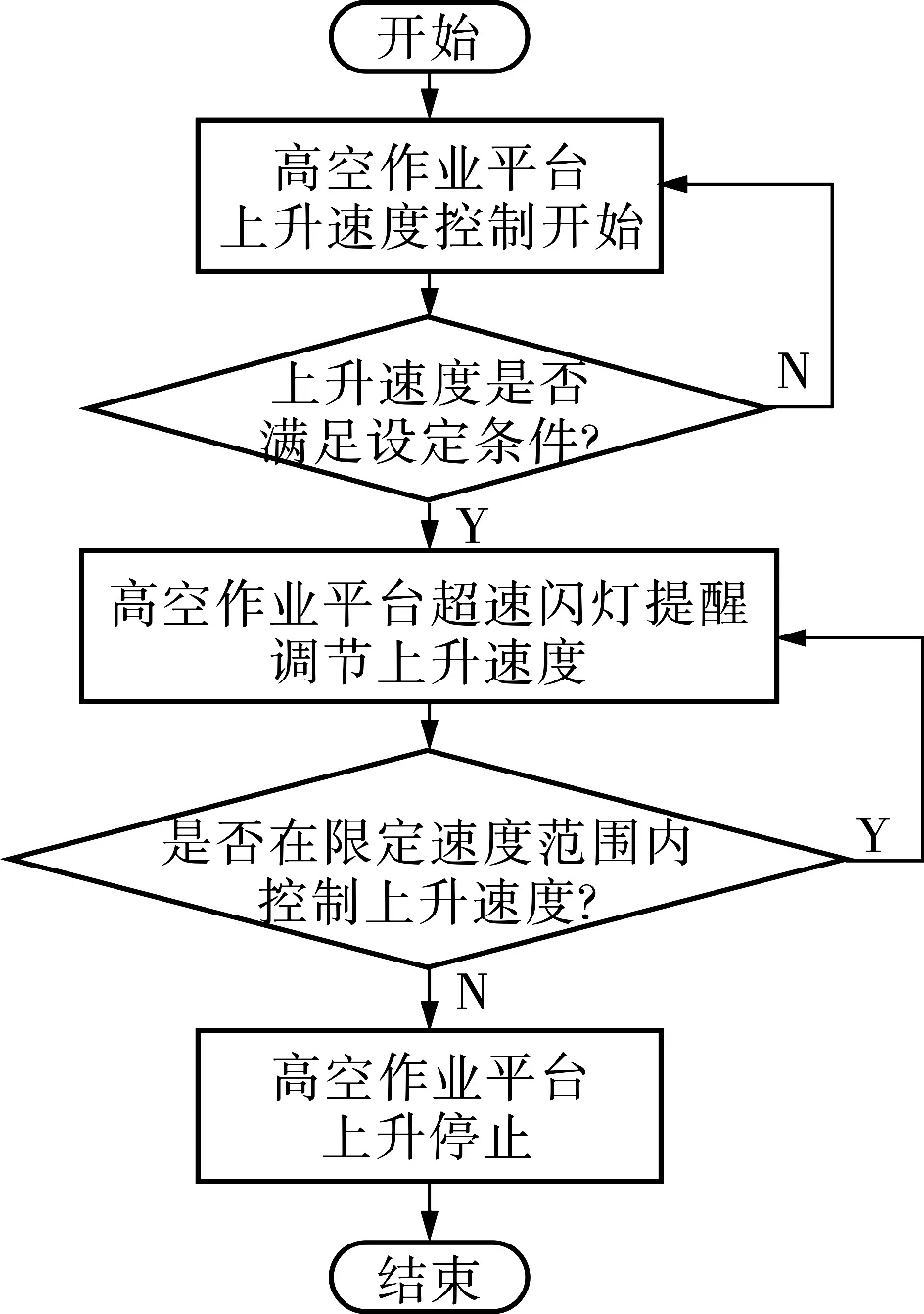
图6 高空作业车平台上升速度控制流程
3.2控制系统梯形图
3.2.1高空作业车调平系统总控制
高空作业车调平系统总控制梯形图如图7所示。点击I0.0开始运行高空作业车调平系统,Q0.0~Q0.3分别代表作业车的前、后、左、右支腿,控制系统接通后4个支腿上电,且亮灯显示。当系统出现紧急状况时,可点击I0.1按钮对系统进行停止送电,保证系统操作的安全性。M0.0表示控制系统自锁保护。

图7 高空作业车调平系统总控制梯形图
3.2.2高空作业车一、二段杠位移控制
高空作业车一段杠位移控制梯形图如图8所示。点击I0.7启动开关,一段位移控制开始,通过T37计时控制臂杆上升的位移高度,点击I1.0停止上升,此时Q0.5得电表示一段臂杆上升位移控制结束。

图8 高空作业车一段杠位移控制梯形图
高空作业车二段杠位移控制梯形图如图9所示。点击I1.1启动开关,二段位移控制开始,通过T38计时控制臂杆上升的位移高度,点击I1.2停止上升,此时Q0.6得电表示二段臂杆上升位移控制结束。

图9 高空作业车二段杠位移控制梯形图
3.2.3作业平台上升速度控制
作业平台上升速度控制梯形图如图10所示。点击I1.3启动按钮,高空作业车作业平台上升速度控制开始,通过计数器C0来进行速度控制。当速度过快时Q0.7(超速提醒灯)得电,当超速严重时Q1.0得电,作业平台停止上升,以保证工作人员的安全。

图10 作业平台上升速度控制梯形图
4 仿真
对在S7-200 Step7-Micro/Win V4.0编程软件中绘制的梯形图进行编译,并把编译后的程序导出以AWI格式保存在桌面。使用S7-200仿真软件装载程序,同时将以AWI格式导出的文件装载。
图11为高空作业车作业平台上升速度控制仿真图。按下启动按钮,接通I0.0、I0.2、I0.3、I0.4、I0.5、I0.6、I0.7、I1.1、I1.3,Q0.2、Q0.3得电证明前、后腿调平完毕,Q0.3、Q0.4得电证明左、右腿调平完毕。

图11 高空作业车作业平台上升速度控制仿真
5 结束语
笔者设计的基于PLC的高空作业车自动调平控制系统,实现了高空作业车调平控制、上升杆位移控制及作业平台上升速度控制等功能,能够按照预期目标正常运行。系统程序设计时对系统的可靠性、稳定性进行了充分考虑,并加入了保护措施,以消除可能存在的事故隐患。高空作业车自动调平控制系统控制、操作简单,使工作人员能够在短时间内进行高空作业,且高空作业车的性能更加稳定、可靠。
[1] 赵静一,安东亮,程斐,等.JHP26型高空作业车液压控制系统研究[J].机床与液压,2010,38(13):99~102.
[2] 段晨东,王小波,薛小庆,等.基于PCD控制器的高空作业平台控制系统设计[J].建筑机械化,2012,33(2):50~53.
[3] 王蒙军.基于PLC的纯水高压泵串级变频控制[J].化工自动化及仪表,2013,40(5):646~647.
[4] 谭青,傅可明.自动调平系统在防空火炮中的应用[J].兵工自动化,2004,23(4):10~11.
[5] 孟凡芹,朱焕勤,耿光辉.PLC控制油封供油装置的研制[J].化工机械,2011,38(2):220~221.
[6] 强宝民,赵典,刘陈,等.基于PLC与变频器的智能起重机系统设计[J].化工自动化及仪表,2013,40(6):787~791.
[7] 胥军,李刚炎,王鹏飞,等.折臂式高空作业车臂架变幅控制系统设计[J].工程机械,2012,43(10):49~53.
(Continued on Page 826)
ControlSystemforAuto-levelingofOverheadWorkingTrucksBasedonPLC
ZHAO Zhi-hua, LIU Yu-min,YAO Jian-hong
(SchoolofElectricalEngineeringandInformation,NortheastPetroleumUniversity,Daqing163318,China)
The S7-200 PLC-based auto-leveling control system for overhead working trucks was designed and the system hardware structure, working principle, control program and ladder diagram were presented. The simulation result shows that this control system can level overhead trucks automatically, realizes rising-stem
2016-02-02(修改稿)
黑龙江省自然科学基金项目(F201404)
TH862
A
1000-3932(2016)08-0805-05
