车辆行驶路面的数字化建模方法研究
2016-11-23王红岩王钦龙芮强李荣利张晶罗韬
王红岩,王钦龙,芮强,李荣利,张晶,罗韬
(1.装甲兵工程学院机械工程系,北京100072;2.北京特种车辆研究所,北京100072)
车辆行驶路面的数字化建模方法研究
王红岩1,王钦龙1,芮强1,李荣利2,张晶2,罗韬2
(1.装甲兵工程学院机械工程系,北京100072;2.北京特种车辆研究所,北京100072)
为提高车辆虚拟试验结果的准确性,对车辆行驶路面数字化建模方法进行了研究。利用双轨真实路形计对中波和长波起伏路面进行测量,并将测量结果与依据路面外形设计参数建立的波形曲线进行对比,验证了测量方法的准确性和可信性;利用双轨真实路形计分别对渣土路、砂石路两种随机路面进行测量,获取了路面不平度实测数据,并采用基于周期图法改进的Welch算法对实测数据进行了功率谱密度估计,依据相关国家标准GB/T 7031—2005评定了路面等级。采用谐波叠加法建立了三维随机路面模型,通过与实测数据作功率谱密度对比,表明二者具有较好的一致性,验证了三维随机路面模型的可信性。
兵器科学与技术;路面测量;路面不平度;谐波叠加法;三维随机路面模型
0 引言
路面不平度通常用来描述路面与固定基准的垂向偏离程度,是车辆行驶过程中的主要激励源[1],影响车辆行驶的平顺性、乘坐舒适性、操纵稳定性、零部件疲劳寿命、运输效率及油耗等各个方面[2-4]。随着现代交通运输、车辆设计等领域的迅速发展,路面不平度研究的重要性日益被人们所重视,特别是在应用虚拟样机技术对车辆动力学性能预测与分析评价方面,仿真路面模型能否真实反映实际路面的相关特征将直接影响计算结果的准确性和可信性,因此,准确获取路面不平度信息并建立相应的路面数字化模型是整个车辆虚拟试验与分析评价的关键。
目前,路面不平度的获取主要有两种方法:试验测量法和重构法[5]。试验测量法的优点是直接、准确,但受地理条件限制较多,且成本较高;重构法是将给定的路面不平度功率谱密度变换为路面不平度。国内外关于路面不平度的重构法研究颇多,目前主要有谐波叠加法、伪白噪声法、自回归(AR)模型法和Fourier逆变换法等。重构法优点是比较简单、迅速,计算结果可直接作为车辆性能模拟的虚拟输入量。但是计算结果的可信性需要作进一步的验证。事实上,在路面数字化建模方面,比较合理的方法是将上述两种方法结合使用,使其各自发挥优势[5]。根据上述分析,本文提出了一种实际路面的数字化建模方法,该方法首先进行车辆典型行驶道路的路面不平度测量工作,在验证测量方法准确可靠的基础上,对车辆行驶随机路面不平度进行测量,根据试验数据建立相应的路面数字化模型,最后验证路面模型的可信性。
1 路面数字化建模的一般性流程
根据路面形式的不同,车辆典型行驶路面可分为两类:具有确定外形的行驶路面和路面不平度在纵向、横向具有随机分布特征的行驶路面。对于确定外形的行驶路面,主要包括起伏路、扭曲路、凸台和各种障碍等,在进行路面的数字化建模时可根据路面外形参数直接生成数字化路面模型;对于随机路面,首先根据路面不平度的测量数据进行功率谱密度估计,确定路面等级,并根据国家标准建立相应的路面数字化模型。为了保证建立的路面模型能够代表实际路面,最后应对模型的准确性和可信性进行验证。在上述工作进行之前,首先对确定外形的路面进行测量,通过对比测量数据与根据实际路面外形设计参数得到的数据,验证路面不平度测量方法的准确性。路面的数字化建模流程如图1所示。
2 基于角度基准的路面不平度测量
路面不平度测量的目的是通过量取路面与设定基准之间的偏离量值来获得路面不平度信息。路面不平度的测量方法和仪器有很多种,按照测量基准分类有固定基准、随动基准、递推基准、惯性基准和角度基准等[6]。本文利用基于角度基准测量原理的双轨真实路形计对车辆行驶路面进行测量。

图1 路面数字化建模流程图Fig.1 Flow chart of digital modeling of road
2.1 双轨真实路形计结构及测量原理
双轨真实路形计以轮式车辆作为载体,可同时对两条单道路面不平度进行测量,如图2所示。

图2 车载双轨真实路形计Fig.2 Vehicle-mounted dual-track real profilometer
双轨真实路形计结构如图3所示,该仪器将陀螺仪作为路面水平基准。两个纵向排列的橡胶测量轮间距为150 mm.摆架相对托臂摆动,叶片弹簧通过托臂给摆架加载,使测量轮与路面接触。摆架相对于托臂转动的角度和托臂相对于车架转动的角度均用旋转变压器测出,陀螺仪测出车架相对于水平基准的角度。
双轨真实路形计采用角度基准测量方法,其三角度求和方案原理如图4所示。αAA′为车架相对陀螺的夹角;αOO′为托臂相对车架的夹角;αDD′为摆架相对托臂的夹角,被测路面与水平基准的夹角为β.

图3 双轨真实路形计结构Fig.3 Structure of dual-track real profilometer

图4 双轨真实路形计测量原理Fig.4 Measurement principle of dual-track real profilometer
图4中,路面相对水平基准成任意角度,过陀螺安装位置以及托臂两端的铰接处,作AA′、OO′和DD′与水平基准平行。其中:αAA′=∠1,αOO′=∠2+∠3,αDD′=∠4+∠5,因此有

由(1)式可知,路面与水平基准的夹角β可由下列三角度求和公式得出

根据图4中所示几何关系,可得

若给定初始条件Z0=0,则有

从而得到路面不平度的递推公式为

双轨真实路形计数据采集系统共有4路输入信号,如图5所示。左、右路测量通道输入信号,其中每路通道包括:αOO′和αDD′两个输入信号;陀螺仪角度输入信号;触发器采样脉冲输入信号。

图5 数据采集通道Fig.5 Data collection channels
在进行路面不平度测量之前,需要对前、后测量轮进行水平标定,利用水平仪将滑轨调平,将前、后测量轮置于滑轨之上,通过微调图6中的旋钮,观察图5中数据采集系统的微安表指针是否归0判断前、后轮是否水平。

图6 测量轮水平校验Fig.6 Measuring wheel horizontal test
本文选取两类周期性起伏路面作为路面不平度测试方法的验证路面,根据后续虚拟试验的相关要求,选取两类随机路面进行路面不平度测量和数字化建模,试验工况设定如表1所示。

表1 路面测量试验工况设定Tab.1 Setting of road measuring conditions
结合试验仪器的特性及测量路面的客观要求,本文应用平均等基长采样[6]的方法,对车辆典型试验路面进行测量,以获得路面不平度数据。
2.2 路面不平度测量及验证
为保证通过双轨真实路形计获得路面不平度数据的准确性,需要对测量结果进行验证[7],本文利用双轨真实路形计测量了中波起伏路和长波起伏路两类路面,其中:中波起伏路波长4 m,路面最大高程为0.3 m;长波起伏路波长7 m,路面最大高程0.2 m,如图7所示。通过对比测量数据与依据路面外形设计参数得到的波形曲线,验证测量结果的准确性。
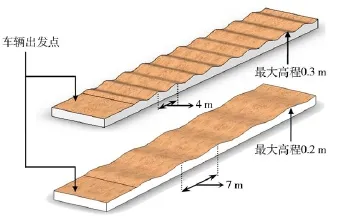
图7 中波起伏路面和长波起伏路面Fig.7 Periodic medium wave and long wave roads
图8和图9分别为实测数据与根据路面外形设计参数建立的曲线对比图。为了直观对比,路面纵向距离取前60 m,并将两条曲线的第一个峰谷点作为路面纵向距离零点。
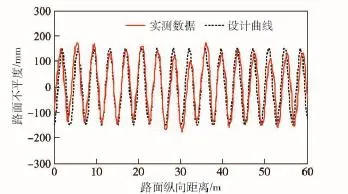
图8 中波起伏路实测数据与设计曲线对比Fig.8 Actual measuring data of periodic medium wave road in comparison with design curve
由图8和图9可知,实测路面与利用路面外形设计参数建立的路面波形曲线有一定差异,利用样本标准差估计可直观反映数据波动情况。标准差定义为

式中:xn为路面高程离散数据;μ为均值,因为路面不平度数据为零均值处理后的数据,所以μ=0;N为路面空间采样点数。利用(6)式分别计算实测路面离散数据和利用设计参数建立的起伏路面离散数据的标准差,计算结果如表2所示。

图9 长波起伏路实测数据与设计曲线对比Fig.9 Actual measuring data of periodic long wave road in comparison with design curve

表2 路面不平度测量结果验证Tab.2 Verification of road roughness measured results
结合图8、图9和表2可知,与根据设计参数得到的路面不平度数据相比,实测中波和长波起伏路面不平度数据均存在一定的误差,这些误差主要来自三个方面:一是实际路面与理论设计曲线存在一定差异;二是实际测量过程中,在起伏路面幅值变化较大处,叶片弹簧压紧力不足,使测量轮不能始终与路面相接触而出现跳离现象,这是路面不平度测量误差的主要来源;三是较大的路面坡道起伏不可避免地引起车轮与路面之间的滑动,导致触发器滚动轮与车轮发生滑移或滑转,产生采样脉冲输入误差。但是,由于路面不平度标准差估计的相对误差较低,说明利用双轨真实路形计测量得到的数据能够较为真实反映路面不平度的相关特征,测量结果准确,可信性较高。
3 车辆行驶路面数字化建模及验证
3.1 随机路面数字化建模
利用双轨真实路形计分别对渣土路和砂石路的路面不平度进行多次测量,选取其中较典型的左右两侧单道路面不平度对纵向距离的变化曲线如图10和图11所示。
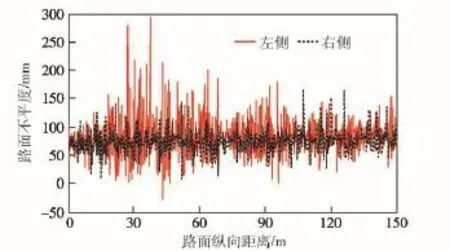
图10 渣土路实测路面不平度变化曲线Fig.10 Changing curves of measured roughness of residue road
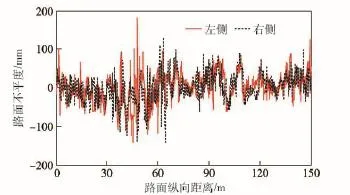
图11 砂石路实测路面不平度变化曲线Fig.11 Changing curves of measured roughness of gravel road
对于随机路面实测数据,应首先进行数据预处理,主要包括数字滤波、零均值化、去线性趋势项,分析预处理后实测数据的统计特征值,之后进行功率谱密度估计,确定路面等级,最后选择合适的方法建立相应等级的随机路面模型。其中,预处理后实测数据的统计特征值如表3所示。

表3 实测数据统计特征值Tab.3 Statistical characteristics of measured data
由表3可知:由于进行了零均值处理,两种路面实测数据的均值为0;渣土路的标准差小于砂石路的标准差,说明渣土路的路面等级较高;由于两种路面左右两侧不平度数据相关系数均小于1,说明在道路横向上路面不平度存在一定的差异。
本文采用基于周期图法改进的Welch算法进行功率谱密度估计。周期图法的基本思想是对随机信号x(n)的N点观察数据xN(n)进行Fourier变换,取其幅值的平方并除以N,作为对x(n)真实的功率谱的估计,即

式中:ω为角频率;X(ejω)为xN(n)的Fourier变换。
Welch算法中,把xN(n)分成L段,对每段数据加窗后分别求功率谱密度,然后取平均值。
根据国家标准GB/T 7031—2005《机械振动 道路路面谱测量数据报告》的相关规定,利用路面不平度信号的功率谱密度可以确定路面不平度等级[8]。其中,路面不平度的功率谱密度拟合表达式为

式中:τ为空间频率(m-1);τ0为空间参考频率,τ0=0.1 m-1;W为分级路面不平度的频率指数;Gd(τ0)为参考空间频率下的路面不平度系数(m3)。根据Gd(τ0)的取值范围不同,GB/T 7031—2005把路面不平度分为8个等级,依次是A级~H级,其中,A级路面等级最高,路面行驶条件最好。
图12和图13表示利用Welch算法对两种实测随机路面左右单道的路面不平度进行功率谱密度估计,并利用标准谱对比确定路面等级。

图12 渣土路面不平度分级图Fig.12 Classification graph of residue road roughness
由图12可知,渣土路面不平度功率谱密度主要在C级和D级之间,其中,空间频率在0.1~0.5 m-1内路面等级主要为D级,在0.5~5 m-1内路面等级主要为C级。由图13可知,砂石路面不平度功率谱密度主要集中在E级和F级之间,其中,空间频率在0.1~0.4 m-1内路面等级主要为F级,在0.4~5 m-1内主要为E级。在确定随机路面等级的基础上,根据相关国家标准GB/T 7031—2005,将随机路面数字化。
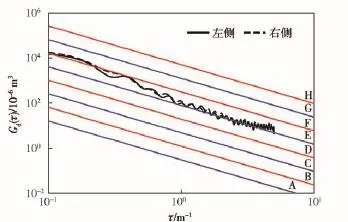
图13 砂石路面不平度分级图Fig.13 Classification graphs of gravel road roughness
根据功率谱密度计算路面不平度的算法较多,主要有谐波叠加法、伪白噪声法、AR模型法和Fourier逆变换法等。与其他方法相比,谐波叠加法尤其适用于实测路面不平度的时域模拟,其算法数学基础严密,简单直观,适应路面范围广[2],因此本文选用谐波叠加法建立渣土路和砂石路的路面数字化模型。
根据实际统计特性,路面不平度信号为平稳高斯过程,因此任意单道路面不平度均可由一系列具有随机相位的正弦函数叠加而成,如(9)式所示:

将(τ1,τ2)划分为长度是Δτ的n个小区间,即n=(τ2-τ1)/Δτ,τ2、τ1分别为路面空间采样频率的上、下限;每个小区间的中间值为τm,i(i=1,2,…,n),即τm,i=(τi+τi+1)/2;令τm,i=τi,对应的谱密度值为Gd(τm,i),Gd(τm,i)按(8)式计算;用Gd(τm,i)代替Gd(τ)在整个小区间内的值,则(9)式中方差为

各个正弦函数分量为

将对应于各个小区间的正弦函数叠加,得到二维随机路面不平度函数为

上述方法主要考虑的是车辆纵向行驶方向的路面不平度,忽略了车辆实际行驶时横向左右单道路面不平度的差异性,这样的路面条件必然给车辆动力学分析结果带来误差。为避免上述问题,本文将其扩展到三维空间,得到三维随机路面不平度函数[9],即

式中:θi(x,y)是一个由随机数构成的二维矩阵,矩阵元素属于[0,2π]且服从均匀分布,矩阵的维数由路面模型的大小决定;F(x,y)为由路面纵向和横向位置x、y决定的位置参数,F(x,y)的形式对三维路面建模没有影响,但是其中x的幂必须为1,本文令F(x,y)=(x2+y2)-2,这样可以确保各单道路面不平度由一系列正弦波分量构成。
根据(13)式,可在Matlab环境下建立三维路面不平度的计算程序,其中,路面空间采样频率的上、下限τ2、τ1的取值应能够覆盖车体及悬架部分的固有频率,所以在分析不同型号车辆时应选取相对应的频率范围。首先确定需要分析的时间频率范围f1、f2,根据选取的分析车速v,利用f=v/λ(λ为波长)可得:λ1=v/f1,λ2=v/f2.又因为路面空间频率为波长的倒数,所以,τ1=1/λ1=f1/v,τ2=1/λ2= f2/v,由此可以确定建立随机路面的空间频率上、下限。
根据上述分析以及渣土路和砂石路在不同空间频率范围内的功率谱密度,得到三维路面不平度数据,利用三维等效容积路面建模方法[10],结合路面不平度数据,生成路面节点和路面单元,并将其按照一定顺序连接在一起,得到渣土路和砂石路的三维随机路面模型,如图14和图15所示。

图14 渣土路三维随机路面模型Fig.14 3D random road surface model of residue road
3.2 随机路面数字化模型验证
为了确保上述三维随机路面模型的可信性,在路面模型中按实际测量轮轮距任取两条单道路面不平度数据,其统计特征值如表4所示。

图15 砂石路三维随机路面模型Fig.15 3D random road surface model of gravel road

表4 三维随机路面模型统计特征值Tab.4 Statistical characteristics of 3D random road surface model
对比表3可知,两种随机路面不平度的均值和标准差与实际路面基本一致,说明路面模型在纵向上可较好地反映实际路面不平度的统计特性。由相关系数可知,三维随机路面模型可较好地反映实际路面不平度的横向差异。为更好地验证路面模型可信性,任取某一单道路面不平度数据与实测路面数据进行功率谱密度对比,如图16和图17所示。

图16 实测渣土路与路面模型不平度功率谱密度对比Fig.16 PSD comparison of measured residue road roughness with road surface model roughness
由图16和图17可知,除低频部分略有差异外,在空间频率为0.5 m-1以上的频率部分,利用谐波叠加法建立的渣土路面模型和砂石路面模型分别与实测砂石路和渣土路的功率谱密度曲线形状及变化趋势较为一致,可以认为建立的随机路面模型能够较好地反映出实际路面不平度的统计特性,模型可信性较好。

图17 实测砂石路与路面模型不平度功率谱密度对比Fig.17 PSD comparison of measured gravel road roughness with road surface model roughness
4 结论
本文提出了一种路面数字化建模方法,该方法综合利用路面不平度实测技术和重构技术,建立了符合实际路面不平度统计特性的三维路面仿真模型,具体结论如下:
1)利用基于角度基准测量原理的双轨真实路形计对中波和长波起伏路面进行了测量,通过对比实测数据与依据路面外形设计参数建立的波形曲线,验证了该测量方法的准确性和可信性。
2)利用双轨真实路形计对渣土路和砂石路面进行了测量,并采用基于周期图法改进的Welch算法对实测随机路面不平度进行了功率谱密度估计,结合相应国家标准GB/T 7031—2005,对随机路面在不同空间频率范围内的路面等级进行了评定。结果表明:渣土路面不平度空间频率在0.1~0.5 m-1内主要为D级,在0.5~5 m-1内主要为C级;砂石路面不平度空间频率在0.1~0.4 m-1内主要为F级,在0.4~5 m-1内主要为E级。
3)利用谐波叠加法分别建立了能够反映车辆实际行驶时左右单道路面不平度差异性的渣土路和砂石路三维随机路面模型。与实测路面结果功率谱密度的对比表明:建立的随机路面模型能够较好地反映出实际路面不平度的统计特性,模型可信性较好。
(References)
[1] 余志生.汽车理论[M].第4版.北京:机械工业出版社,2009. YU Zhi-sheng.Automobile theory[M].4th ed.Beijing:China Machine Press,2009.(in Chinese)
[2] 段虎明,石峰,谢飞,等.路面不平度研究综述[J].振动与冲击,2009,28(9):95-101. DUAN Hu-ming,SHI Feng,XIE Fei,et al.A survey of roughness study[J].Journal of Vibration and Shock,2009,28(9): 95-101.(in Chinese)
[3] 岳杰,张进秋,宋征,等.傅里叶逆变换模拟路面对车辆平顺性的影响[J].噪声与振动控制,2014,34(1):132-136. YUE Jie,ZHANG Jin-qiu,SONG Zheng,et al.Simu-lation of influence of road roughness on vehicle's ride comfort based on inverse discrete Fourier transform[J].Noise and Vibration Control,2014,34(1):132-136.(in Chinese)
[4] 刘永臣.路面不平度垂向传递机理及其对车辆结构疲劳损伤的影响研究[D].镇江:江苏大学,2013. LIU Yong-chen.Research of road roughness vertical transfer mechanism and its impact on vehicle structure fatigue damage[D].Zhenjiang:Jiangsu University,2013.(in Chinese)
[5] 过学迅,刘汉斌,汪斌,等.路面不平度的测量与重构[J].车辆与动力技术,2010(4):14-18. GUO Xue-xun,LIU Han-bin,WANG Bin,et al.Road surface roughness measurement and its reconstruction[J].Vehicle and Power Technology,2010(4):14-18.(in Chinese)
[6] 赵济海,王哲人,关朝雳.路面不平度的测量、分析与应用[M].北京:北京理工大学出版社,2000. ZHAO Ji-hai,WANG Zhe-ren,GUAN Chao-li.Measurement,analysis and applications of road surfaceroughness[M].Beijing: Beijing Institute of Technology Press,2000.(in Chinese)
[7] Kollmer H,Weiler B.Road profile measurement in different markets for the comparison of operating load for passenger cars and commercial vehicle[C]∥FISITA 2010 World Automotive Congress.Budapest,Hungary:FISITA,2010:2137-2146.
[8] GB/T 7031—2005 机械振动 道路路面谱测量数据报告[S].北京:中国标准出版社,2005. GB/T 7031—2005 Mechanical vibration—road surface profiles—reporting of measured data[S].Beijing:Standards Press of China,2005.(in Chinese)
[9] 薛劲橹,王红岩,迟宝山.履带车辆试验路面统计特性的仿真[J].汽车工程,2012,34(7):647-652. XUE Jin-lu,WANG Hong-yan,CHI Bao-shan.Modeling research on road used for virtual experiment of tracked vehicle[J].Automotive Engineering,2012,34(7):647-652.(in Chinese)
[10] 陈军.MSC.ADAMS技术与工程实例分析[M].北京:中国水利水电出版社,2008. CHEN Jun.Technology and engineering analysis example of MSC.ADAMS[M].Beijing:China Water Power Press,2008.(in Chinese)
Research on Digitized Modeling Method of Riding Road of Vehicle
WANG Hong-yan1,WANG Qin-long1,RUI Qiang1,LI Rong-li2,ZHANG Jing2,LUO Tao2
(1.Department of Mechanical Engineering,Academy of Armored Forces Engineering,Beijing 100072,China;2.Beijing Special Vehicle Research Institute,Beijing 100072,China)
Digitized modeling method of riding road of vehicle is researched for improving the accuracy of vehicle virtual test results.Dual-track real profilometer is used to measure the periodic medium wave and long wave roads.The credibility and veracity of measuring method are verified by comparing actual measuring data with wave curves which are built based on the design parameters of road outline.Then two kinds of random roads,i.e.,residue road and gravel road,are measured by using a dual-track real profilometer,and the actual road roughness data is obtained.Power spectral density(PSD)of actual measuring data is estimated by Welch algorithm based on modified periodogram method,and the rank of measuring random road is assessed according to GB/T 7031—2005 national standard.The 3D random road models are built by means of harmony superposition method,of which PSD is consistent with actually measured data,and its credibility is verified consequently.
ordnance science and technology;road measuring;road roughness;harmony superposition method;3D random road surface model
TJ811
A
1000-1093(2016)07-1153-08
10.3969/j.issn.1000-1093.2016.07.001
2016-01-07
军队“十二五”预先研究项目(2011YY18)
王红岩(1965—),男,教授,博士生导师。E-mail:why_cvt@263.net;王钦龙(1987—),男,博士研究生。E-mail:wang_qinlong@126.com
