最小二乘法与灰度重心结合实现圆度检测
2016-11-22索振鹏宫爱玲
索振鹏 宫爱玲
(昆明理工大学理学院,昆明 650504)
最小二乘法与灰度重心结合实现圆度检测
索振鹏 宫爱玲
(昆明理工大学理学院,昆明 650504)
产品检测中若采集到的图像是模糊的,其轮廓边缘均不清晰,常规的边缘检测算法中,二值化处理会导致图像边缘信息丢失,降低图像边缘像素位置的定位精度,最终会影响产品圆度误差计算的精度。针对这一问题,在提取图像的边缘后通过灰度重心法进行坐标区域的重新定位,然后对得到的坐标点进行最小二乘法拟合。最后,通过对激光光斑的圆度检测实验,分析拟合结果的圆度误差,证明了该算法的优越性。
最小二乘法 圆度检测 灰度重心
数字图像的边缘检测一直是倍受关注的研究热点之一。数字图像的边缘在方向上的突变可以用一阶导数或二阶导数进行检测,边缘点处灰度分布满足一阶导数达到极大值而二阶导数为零这一条件[1]。对于模糊的图像,笔者应用灰度重心将图像边缘的突变进行加权处理然后使用最小二乘法拟合检测图像边缘,使用该算法检测激光光斑的圆度时,圆心定位精度较高。
1 最小二乘法与灰度重心
1.1 最小二乘法
最小二乘法是数学中逼近优化的一种方法[2,3],它将误差的平方和最小化从而得到最佳匹配函数,在图像边缘检测中通常用于圆曲线的拟合。数学中圆方程的标准形式为:
(x-x0)2+(y-y0)2=R2
(1)
如果令A=-2x0,B=-2y0,C=x02+y02-R2,则圆的方程可变形为一般形式:
x2+y2+Ax+By+C=0
(2)
令边缘点集{(Xi,Yi)|(i∈1,2,3,…,N}中的点到圆心的距离为Di(图1),则:
(3)
残余误差的平方为:
(4)


图1 最小二乘圆示意图
(5)
(6)
(7)
由N×(4)-(5)×ΣXi(其中(4)、(5)分别为式(4)、(5))消去参数C得:
(8)
同理N×(5)-(6)×∑Yi得:

(9)

由此即可求得拟合的圆心坐标和半径分别为:


(10)
1.2区域灰度重心
数字图像处理技术中灰度图像的灰度一般用数值0~255表示[4],0表示黑色,255表示白色。应用物理学知识将像素的灰度值看作像素质量,则原来表示灰度级的二维空间转变为带有像素质量的三维空间(图2),那么灰度图像在三维空间中,灰度值高的区域像素质量较大,灰度值低的区域像素质量较小[5,6]。
图2 像素质量示意图
灰度重心法计算公式如下:

(11)
其中,xc、yc分别表示图像在s区域内相应灰度重心的横坐标与纵坐标。利用灰度重心公式计算出s区域灰度的重心[7]来重新进行边缘坐标定位。
算法设计步骤如下:
a. 采集一副边缘模糊的图像,使用Canny算子提取其边缘轮廓;
b. 根据式(11)进行区域灰度重心的重新定位;
c. 提取定位后的像素点,应用最小二乘圆拟合;
d. 求得检测结果的圆度误差并进行比较分析。
2 激光光斑圆度拟合实验
对激光光束分析仪采集的激光光斑进行灰度化。由于边缘处是激光能级的模糊分界线,所以在边界提取的过程中会带来很大的误差。分别使用两种方法检测激光光斑的圆度:最小二乘法的拟合结果如图3所示,最小二乘法结合灰度重心法的拟合结果如图4所示。

图3 最小二乘法光斑拟合结果
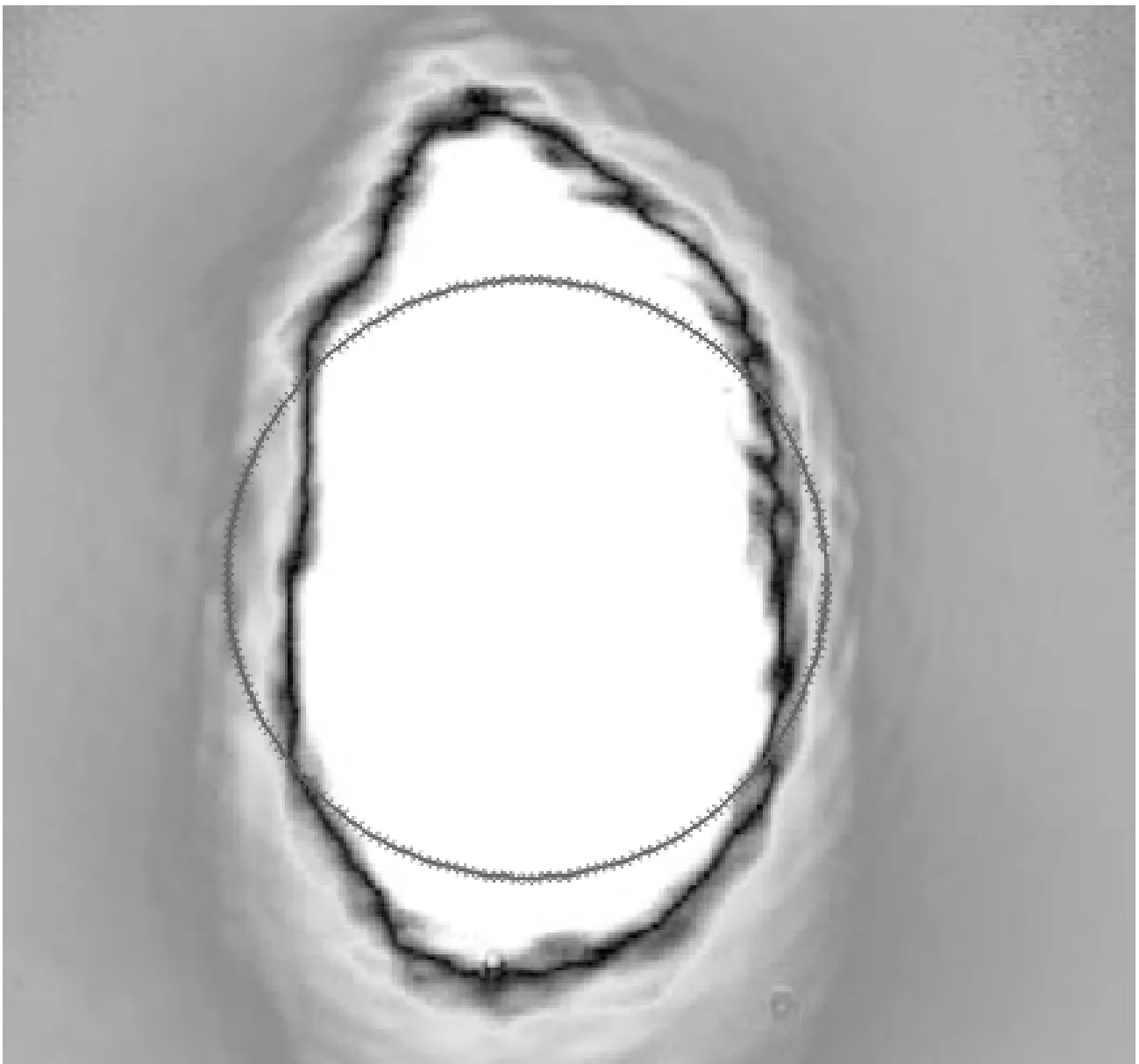
图4 最小二乘法结合灰度重心光斑拟合结果
对两种拟合结果的圆度误差[7,8]进行评定(表1)。圆度误差定义为D=Rmax-Rmin,其中,Rmax为理想圆圆心到被测实际轮廓的最远距离,Rmin为理想圆圆心到被测实际轮廓的最近距离。
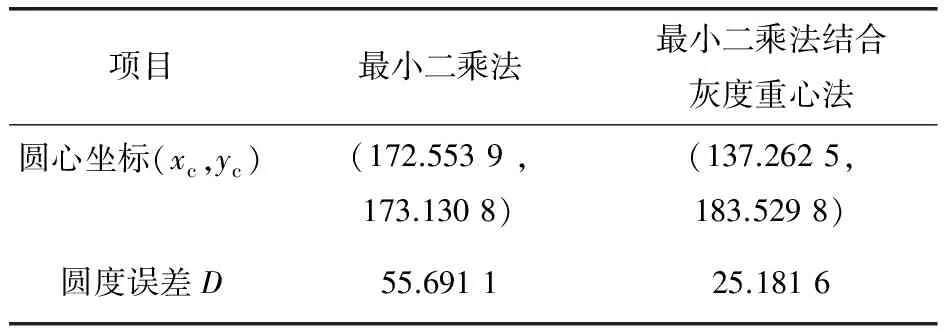
表1 激光光斑的圆度误差
通过分析表1的数据可得:最小二乘法结合区域灰度重心拟合光斑圆度的误差比最小二乘法减小了近30个像素点,可见其定位精度更高,减小了模糊图像边缘定位的不确定度,提高了产品检测的精度,保证了产品的质量。
3 结束语
笔者最先阐述了最小二乘法与区域灰度重心法的基本原理,并对图像区域灰度重心进行加权处理的改进,而后将两者结合来实现对模糊图像边缘的定位。通过处理边缘模糊的激光光斑图得到相关数据,对数据进行分析可得两者结合后可以相对精确定位模糊图像的边缘信息。该算法具有较强的实用性,为产品在生产过程中提取模糊边缘信息提供了简单、易行、可靠的方法。
[1] 韩亮亮.基于机器视觉的香烟滤棒圆度检测算法研究[D].哈尔滨:哈尔滨理工大学,2013.
[2] 霍建亮,曾翎,王德胜,等.基于最小二乘法改进的随机圆检测算法[J].光电工程,2011,38(5):145~150.
[3] 张斌.最小二乘法在空间圆度检测中的应用[J].山西建筑,2013,39(10):150~151.
[4] 林晓敏,桂婷,胡同森.基于重心的一种灰度图像边缘检测算法[J].计算机系统应用,2010,19(12):235~237.
[5] 芦宁,朱睽,喻擎苍,等.亚像素检测方法在图像检测点提取中的应用[J].机电工程,2011,28(3):350~353.
[6] Gao W,Kiyono S,Nomura T.A New Multiprobe Method of Roundness Measurements[J].Precision Engineering,1996,19(1):37~45.
[7] 李旭,王正勇,吴晓红,等.一种改进非极大值抑制的 Canny 边缘检测算法[J].成都信息工程学院学报,2011,26(5):564~569.
[8] Gao W,Kiyono S,Sugawara T.High-Accuracy Roundness Measurement by a New Error Separation Method[J]. Precision Engineering,1997,21(2):123~133.
LeastSquaresMethodCombinedwithGrayCentroidMethodforDetectingRoundness
SUO Zhen-peng, GONG Ai-ling
(CollegeofScience,KunmingUniversityofScienceandTechnology,Kunming650504,China)
Considering the fact that in the product testing, both outline and edge of product images collected becomes unclear; and in general edge detection algorithm, the binarization processing can incur loss of the images’ edge information and reduce location accuracy of the images’ edge pixel, this will influence the precision of calculating product’s roundness error; making use of gray centroid method after extracting the image’s edge to relocate regional coordinate was proposed to fit coordinate points obtained with least squares method. Detecting roundness of laser spots and analyzing their roundness error prove superiority of the algorithm proposed.
least squares method,roundness detection,gray centroid
TP301.6
A
1000-3932(2016)09-0910-03
2016-07-25(修改稿)
