步进式加热炉钢坯运动的非线性PID控制
2016-11-22鲁照权
鲁照权 程 健
(合肥工业大学电气与自动化工程学院,合肥 230009)
步进式加热炉钢坯运动的非线性PID控制
鲁照权 程 健
(合肥工业大学电气与自动化工程学院,合肥 230009)
在步进梁系统数学模型的基础上,设计了一种步进式加热炉钢坯运动的非线性PID控制方法。仿真实验结果证明:非线性PID控制可实现步进梁速度的准确、平稳跟踪,有效消除移动梁托起钢坯时产生的速度跌落。
非线性PID控制器 步进式加热炉 步进梁系统 移动梁速度闭环控制
步进式加热炉是各种加热炉中使用最广、发展最快的炉型之一。步进梁是钢坯加热炉的核心部件,由固定梁与移动梁构成,其中移动梁由液压缸驱动做矩形运动,使数百吨的钢坯在加热过程中逐步地自入炉侧向出炉侧移动。步进梁的运动速度既要保证生产的节奏,又要对钢坯轻托轻放,因此应避免步进梁产生碰撞、损坏移动梁和固定梁。但由于步进梁运动部分的惯性极大,加上负载的阶跃式突变,实现其速度和位移的精准控制难度很大。另外,移动梁自身体积大且重,在大型加热炉中,满载钢坯常达数百吨,可见步进梁系统具有典型的大惯性特点。又由于流量、压力变化及泄漏等因素的影响,使得液压传动机构具有非线性特性[1]。因此,控制步进梁在运行周期内各阶段平稳、准确、快速地运动一直是工程上的难题,尤其是移动梁托起钢坯时产生的速度跌落难以消除。目前,国内大部分轧钢厂均采用以PLC为核心的开环控制方法对加热炉中的步进梁速度进行控制,但该方法会造成速度控制不准而影响生产周期。为此,笔者针对负载阶跃性变化和液压缸死区非线性的问题[2,3],以某步进式加热炉为背景,在已建立的数学模型的基础上,给出步进式加热炉钢坯运动的非线性PID控制方法,实现步进梁系统速度的准确跟踪,以消除速度跌落的问题。
1 步进梁系统的数学描述
在步进梁的4个运动过程中,考虑到上升过程最难控制,且最具代表性,因此笔者只对步进梁的上升过程进行分析。
步进梁系统(图1)由非对称电液比例阀、非对称液压缸、斜轨式步进机构、移动梁和固定梁构成。

图1 步进梁系统的结构框图
FL——负载;
ps——油源压力;
Uup——电液比例阀的控制信号;
Vup——步进梁垂直运动的速度;
xp——液压缸活塞位移;
θ——双轮斜轨式步进机构的斜坡角度
其中液压缸活塞位移xp的计算式为[4]:
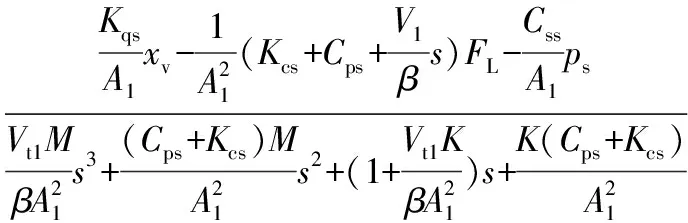
(1)
式中A1——无杆腔的有效面积,m2;
Cps——等效内泄漏系数,m5/(N·s);
Css——等效外泄漏系数,m5/(N·s);
FL——负载,N;
K——弹簧系数,N/m;
Kcs——流量压力,m5/(N·s);
Kqs——流量增益,m2/s;
M——总质量,kg;
ps——油源压力,Pa;
V1——液压缸容积,m3;
Vt1——无杆腔的有效体积,m3;
xp——活塞位移,m;
xv——阀芯位移,m;
β——油液弹性模量,Pa。
步进梁的位移Y(s)的计算式为:
Y(s)=Xp(s)sinθ
(2)
而速度为位移对时间的微分,因此由式(1)、(2)即可得到步进梁的运动速度。
2 非线性PID控制器
经典PID调节器的控制量u(t)取决于控制系统参考输入r(t)与输出y(t)的偏差、偏差积分和偏差微分的线性组合,即:

式中e(t)——偏差;
Kp、Ti、Td——比例、积分、微分系数。
然而,参考信号r(t)经常不可微,甚至不连续,输出y(t)又经常被噪声污染,因而偏差e(t)按经典意义通常不可微,其微分信号不能利用。因此,用r(t)和y(t)来产生代替经典PID调节器的3个要素,建立新的非线性组合框架,即跟踪-微分器,来克服以上缺点。跟踪-微分器的结构框图如图2所示[5]。
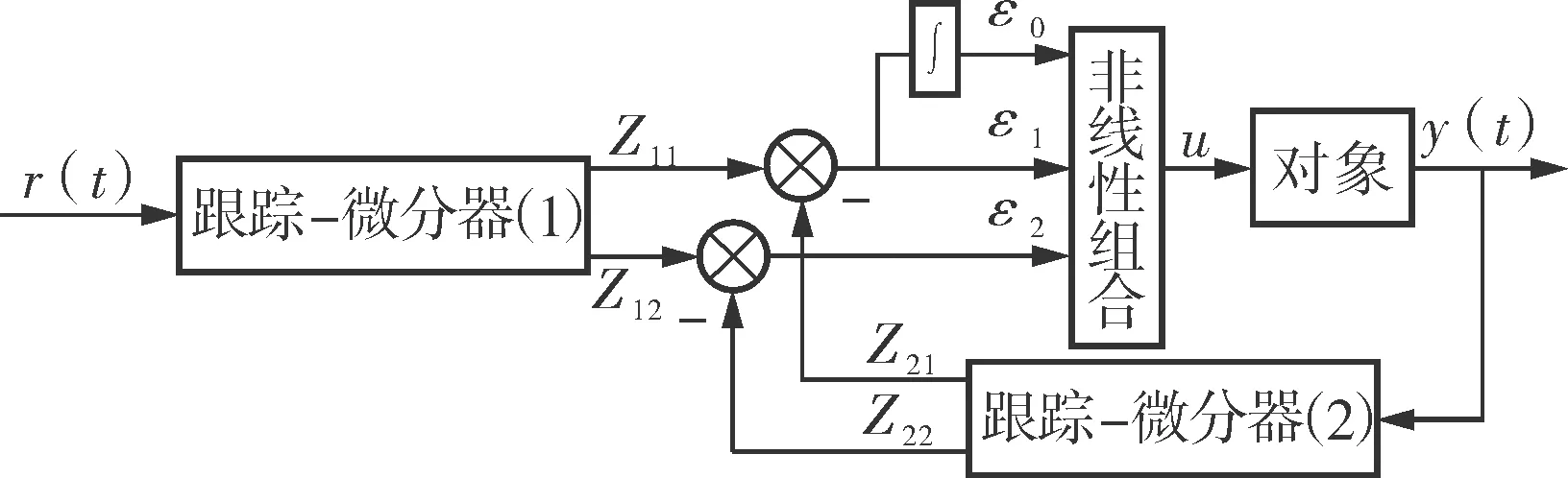
图2 跟踪-微分器的结构框图

用ε1(t)、ε2(t)、ε0(t)代替经典PID控制器中的基本要素e(t)=r(t)-y(t)、e(t)的微分和e(t)的积分,即:
ε1(t)=Z11(t)-Z12(t)
(3)
ε2(t)=Z12(t)-Z22(t)
(4)
(5)
然后将上述变量进行适当的非线性组合即可得到新的控制量u(t)。
这里,非线性PID控制器[6]的基本要素不是直接取自输入输出的误差,而是输入输出信号经非线性处理后所得到的新的误差及其微分、积分,其具体表达形式为:
(6)
根据二阶最快速开关系统[7],构造跟踪-微分器如下:
(7)
(8)
Z5=Z1-Z3
ε0=Z5
ε1=Z1-Z3
ε2=Z2-Z4
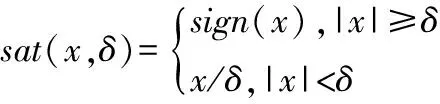
u1=β0fal(ε0,α,δ)+β1fal(ε1,α,β)+β2fal(ε2,α,β)
(9)
式(7)为跟踪-微分器(1),式(8)为跟踪-微分器(2)。该控制器以r(t)和y(t)为输入,u(t)为控制量,含有参数R1、δ1、R2、δ2、α、δ、β0、β1、β2。其中,R1根据过渡过程要求确定;δ1是与积分步长和R1有关的参数,由跟踪-微分器的单独仿真来确定;R2通常取值较大;δ2=R2δ1/R1;α在0.5~1.0之间;δ较小;β0、β1、β2是PID控制器的增益系数,尚无确定的方法调整,只能通过仿真确定。
3 系统仿真与分析
3.1系统相关参数与计算
以某步进梁系统作为研究对象,其参数[8]为:β=1.0GPa,A1=0.0616m2,Kqs=1.23m2/s,Kcs=3.07×10-9m5/(N·s),M=1.31×105kg,V1=7.68×10-2m3,Vt1=1.96×10-2m3,Css=-6.9×10-12m5/(N·s),Cps=7.66×10-11m5/(N·s),ps=16MPa。
考虑到系统的结构特点,忽略系统的弹性负载K,将系统参数代入液压缸模型表达式,得到其位移y与阀芯位移xv和负载FL之间的关系为:
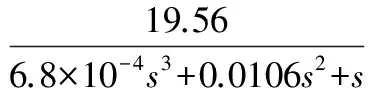
(10)
3.2仿真与结果分析
根据图2和式(10),在Matlab/Simulink中搭建如图3所示的控制程序。图3中,wfgzq和wfgzq2为两个跟踪-微分器,是根据式(7)、(8)编写的s函数;ncb为非线性组合,是根据式(6)、(9)编写的m函数。经过大量的仿真与实验调试,最后确定的一组控制器参数为:R1=1,δ1=5,R2=20,δ2=100,α=0.7,δ=4,β0=8.5,β1=30,β2=0.8。
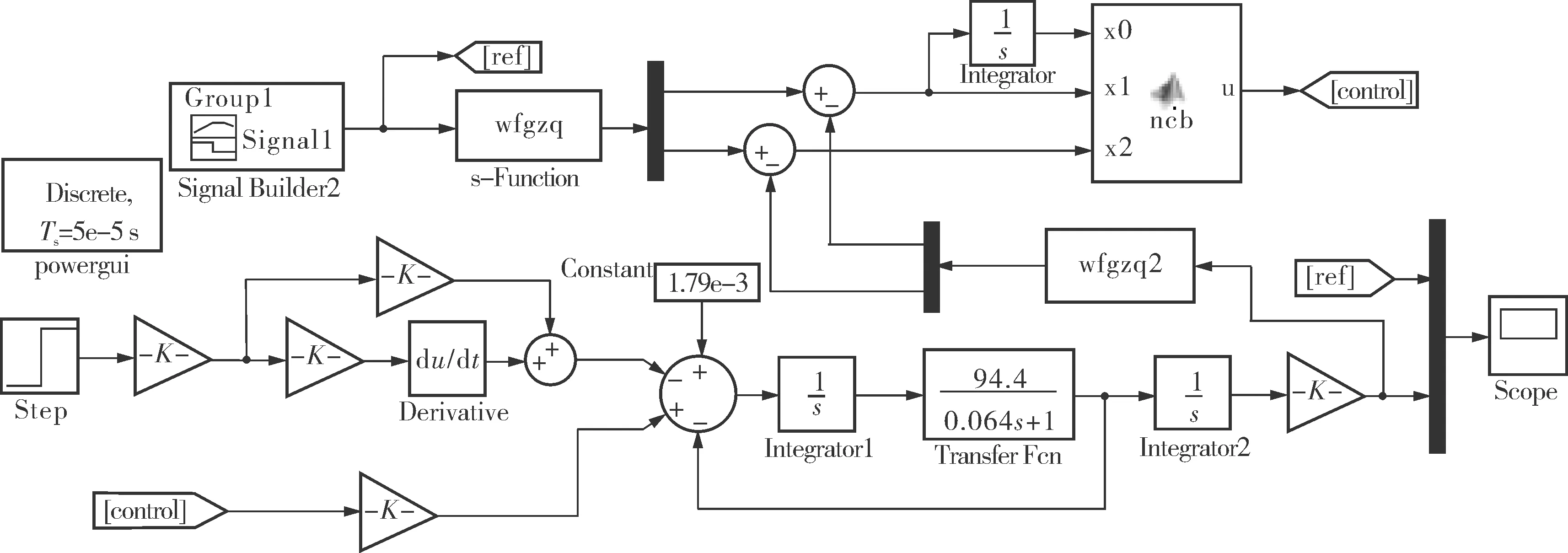
图3 步进梁系统的非线性PID控制程序
仿真时,将给定信号调整为步进梁系统在现场的运行速度曲线,即梯形运行曲线[9]。系统分别采用普通PID控制器和非线性PID控制器控制时,所得速度响应曲线如图4所示。可以看出,普通PID控制步进梁运动时,在突加负载时,即移动梁托起钢坯时(6s),出现2mm/s的速度跌落,造成钢坯运动速度的严重不稳定。而采用非线性PID控制时,在突加负载时,速度基本保持不变,保证了移动梁运送钢坯时速度的准确性与稳定性。
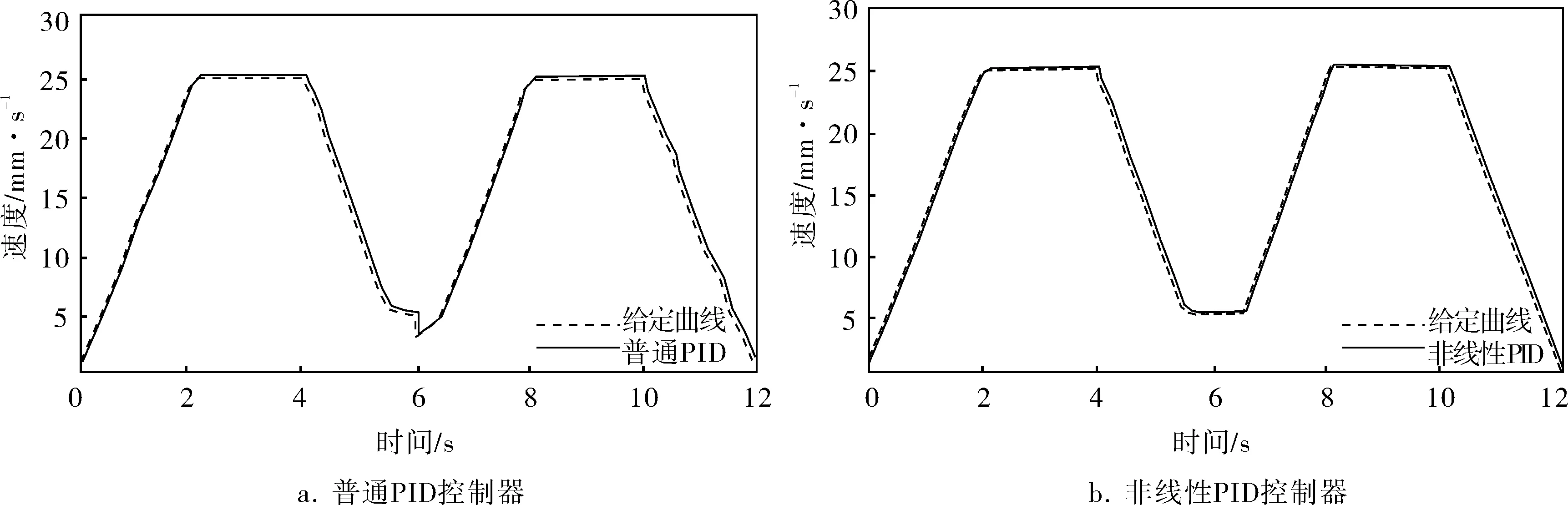
图4 不同控制器作用下的步进梁速度曲线
4 结束语
笔者针对步进式加热炉负载阶跃性突变和液压缸死区非线性的问题,基于步进梁的数学模型,设计了一个非线性PID控制器,并将它应用于对步进梁速度的控制。仿真分析结果表明,非线性PID控制方法相比于普通PID控制,实现了步进梁运动速度的准确、稳定跟踪,消除了移动梁托起钢坯时的速度跌落,提高了抗负载扰动的性能。
[1] 鲁照权,任才横,何娟,等.基于自适应解耦的加热炉燃烧系统控制[J].化工自动化及仪表,2013,40(7):827~830.
[2] 赵艳东,任宪勇,张兴隆,等.基于阶跃模型的非线性模糊PID控制算法研究[J].化工自动化及仪表,2010,37(7):28~31.
[3] Ni J,Peng L.Nonlinear Modeling and Control for Electro Hydraulic Servo System in Pipe Expanding Process[J].IEEE Conference on Decision & Control,2009,45(5):6034~6039.
[4] 邹扬举.步进式加热炉电液控制系统分析与建模[D].合肥:合肥工业大学,2013.
[5] 韩京清,王伟.非线性跟踪-微分器[J].系统科学与数学,1994,14(2):177~183.
[6] 韩京清.非线性PID控制器[J].自动化学报,1994,20(4):487~490.
[7] 韩京清.控制理论——模型论还是控制论[J].系统科学与数学,1989,9(4):328~335.
[8] 鲁照权,邹扬举,任才横,等.步进炉钢坯测量与定位控制系统[J].电子测量技术,2012,35(10):36~40.
[9] 曾良才,陈奎生,湛从昌,等.步进梁加热炉速度智能控制技术研究[J].武汉科技大学学报(自然科学版),2008,31(1):23~27.
NonlinearPIDControlofBilletSteelMovementinWalkingBeamFurnace
LU Zhao-quan, CHENG Jian
(SchoolofElectricalEngineeringandAutomation,HefeiUniversityofTechnology,Hefei230009,China)
Basing on establishing walking beam’s mathematical model, a nonlinear PID control over the billet steel’s movement in walking beam furnace was designed. The simulation results show that, this nonlinear control method can realize accurate tracking of the velocity of the walking beam and can eliminate any velocity drop of the billet steel incurred by jack-up of the walking beam.
nonlinear PID control, walking beam furnace, walking beam system, closed-loop control over walking beam’s velocity
TH865
A
1000-3932(2016)09-0897-04
2015-12-22(修改稿)
国家自然科学基金项目(60974022);合肥工业大学企业委托项目(105-432683/11-037)
