混联式混合动力汽车参数匹配设计及性能仿真
2016-11-19石洪张蕾
石洪,张蕾
(1.天津职业技术师范大学机械工程学院,天津300222;2.天津职业技术师范大学汽车与交通学院,天津300222)
混联式混合动力汽车参数匹配设计及性能仿真
石洪1,张蕾2
(1.天津职业技术师范大学机械工程学院,天津300222;2.天津职业技术师范大学汽车与交通学院,天津300222)
对混联式混合动力汽车动力系统各部件进行选型及参数匹配设计,选定合适的发动机、动力电池、ISG电机和驱动电机的型号及参数,并运用CRUISE仿真平台建立该动力系统整车模型并进行性能仿真。仿真结果表明:该动力系统动力性能满足设计要求,汽车部件选型及参数匹配合理,为混合动力汽车的设计提供了理论依据。
混联式混合动力汽车;参数匹配设计;动力系统;CRUISE
发展混合动力汽车(hybrid electric vehicel,HEV)的必要性在于其具有良好的社会效益和经济效益,并能够优化能源消耗结构[1]。混合动力汽车动力系统参数匹配设计是HEV前期开发的重要前提和基础性工作[2]。混联式混合动力汽车(parallel-series hybrid electric vehicle,PSHEV)兼有串联式和并联式混合动力汽车的优点,适用于各种工况,在轿车上的应用较多,能够有效改善汽车燃油消耗及降低排放。本文选择PSHEV动力系统为研究对象,对其动力部件进行选型和参数匹配设计,借助CRUISE仿真平台建立整车模型,并对该PSHEV动力性和经济性进行仿真,为PSHEV后期开发提供依据。
1 混联式混合动力汽车布置形式
PSHEV动力系统布置简图如图1所示。PSHEV有2种能量复合形式:一种是发动机与动力电池之间以电力形式进行动力耦合,此种动力耦合方式与串联式混合动力汽车相似,发动机的机械能经过动力分配机构驱使ISG电机发电,与来自蓄电池的电能耦合后通过驱动电机输出给主减速器;另一种是发动机与动力电池之间以机械形式进行动力复合,此种动力耦合方式与并联式混合动力汽车相似,发动机产生的机械能与驱动电机产生的机械能通过动力复合机构进行动力耦合后传递给主减速器。
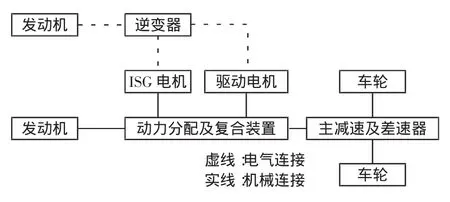
图1 PSHEV动力系统
本文的动力复合及分配机构采用双行星排结构,发动机连接第1个行星排行星架,ISG电机与驱动电机分别与2个行星排的太阳轮连接,第2个行星排行星架固定,2个行星排共用一个行星架向车轮输出机械能。
2 混合动力系统部件参数选型及匹配设计
PSHEV整车参数如表1所示。汽车设计要求如表2所示。通过表中参数对汽车各部件进行参数设计。

表1 汽车整车参数

表2 汽车设计指标
PSHEV动力系统参数设计主要确定发动机、ISG电机、驱动电机、动力电池、传动比等部件参数。
2.1发动机参数匹配及选型
发动机功率应遵循3个基本原则,即发动机功率应同时满足汽车在平直路面上以一定车速高速巡航的动力性要求、汽车爬长坡的动力性要求以及发动机单独驱动时的加速要求。3个基本原则的计算公式分别为:

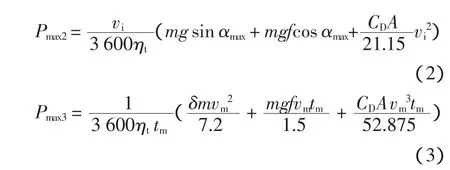
式中:P为功率;vcruise为汽车巡航车速;ηt为传动系传动效率;m为汽车质量;g为重力加速度;f为滚动阻力系数;CD为风阻系数;A为迎风面积;tm为0~100 km/h加速时间;δ为车辆旋转质量换算系数;vm为加速时最终速度;vi为爬坡速度;αmax为最大爬坡度对应的斜坡与水平面夹角。
由式(1)-(3)得出Pmax1=26.061 kW、Pmax2=48.936 kW、Pmax3=51.089 kW,所以发动机功率应大于等于51 kW。考虑到发动机工作在经济区域,需要10%左右的功率富余量;而发动机在行车过程中,还需要一部分额外能量为蓄电池充电,通过对比确定选取4G13S发动机,其基本参数如表3所示。

表3 发动机参数表
2.2传动比参数匹配
对传动比的匹配设计,需要确定最大传动比和最小传动比,计算公式为[3]:

式中:i为汽车传动比;nemax为发动机最高转速;rw为车轮有效滚动半径;Tmax为发动机最高转矩。
由上式计算得出imin=3.05、imax≥13.84,本文取主减速传动比为5.68,行星排齿圈与太阳轮之比为1.454。
2.3驱动电机参数匹配
永磁电动机具有效率高、结构紧凑、低转速时大转矩、易于再生制动控制等优点,在EV和HEV动力系统中应用最广泛[4],因此本文以永磁电动机作为该车的驱动电机。
驱动电机需确定2个参数:自然转速与额定功率。驱动电机的自然转速应大于等于车辆最高行驶车速所对应的驱动电机连接点的转速值,驱动电机的自然转速计算公式为:

式中:nMmax为主电机需求转速;k2为主电机到主减速器之间的传动比;i0为主减速器速比;vemax为汽车纯电动行驶最高速度。
驱动电机功率必须满足汽车纯电动巡航、爬坡和加速时的要求,分别由式(1)-(3)求出。
纯电动巡航速度取90 km/h,百米加速时间取值22 s,由式(6)计算得nMmax≥4 834.863 r/min。由式(1)-(3)得到Pmax1=14.171 kW、Pmax2=48.936 kW、Pmax3=47.278 kW,因此主电机额定功率应大于等于48.936 kW,选择永磁电动机功率为50 kW,驱动电机参数如表4所示。
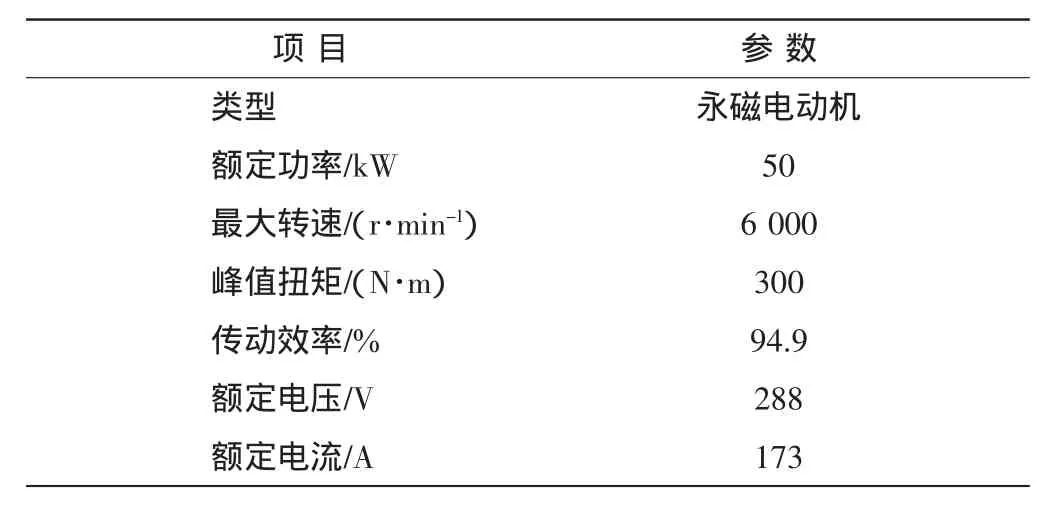
表4 驱动电机参数
2.4ISG电机选择
ISG电机作为启动机时,额定转矩应满足汽车怠速启动的要求,即电机能在规定时间内将发动机拖转至怠速转速,该额定转矩的计算公式为:

式中:TG为在t时间内将发动机拖转至怠速转速所需转矩;nidle为发动机怠速转速;I为发动机转动惯量;t为将发动机启动到怠速转速所需要的时间;me为发动机质量;re为发动机气缸半径。
由式(7)、式(8)可得TG=23.175 N·m,由于发动机最高转速为6 000 r/min,ISG电机应大于发动机最高转速,初步选定ISG电机转速为6 500 r/min,电机基速为3 000 r/min[5]。对应的ISG电机峰值功率为:

式中:PISG为ISG电机的峰值功率;ωb为ISG电机基速。
根据式(9)计算得PISG=11.588 kW,最终选定ISG电机参数如表5所示。

表5 ISG电机参数表
2.5能量存储单元选型及参数匹配
氢镍电池具有良好的充电特性、较高的能量利用率及安全的适用性,几乎高达100%的充电特性也能更好地回收汽车制动或减速时产生的能量,使用寿命长,受频繁充放电影响状态小。本文用氢镍电池作为汽车能量存储单元[6]。氢镍电池的参数匹配设计需要确定2个参数:电池个数和电池容量。
2.5.1氢镍电池个数计算
氢镍电池单体个数的确定应满足2个基本条件:一是电池充放电功率应与发电机的功率相适应,二是动力电池功率应满足驱动电机正常工作时的所需功率。由于驱动电机功率远大于ISG电机,动力电池需求功率满足条件二即可,计算公式为:

由动力电池所需功率除以单体氢镍电池的功率可得所需单体氢镍电池的个数,计算公式为:
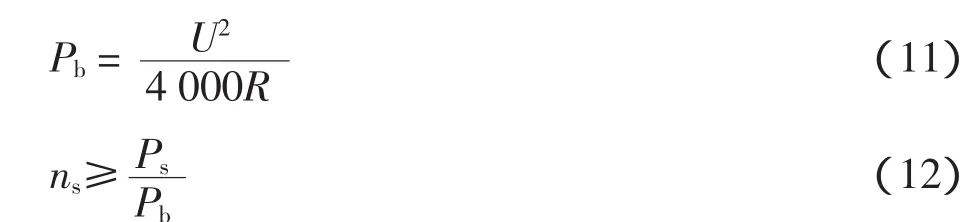
式中:Ps为满足主电机正常工作所需的功率;ηM为主电机传动效率;ηc为功率转换器效率;ns为氢镍电池的个数;Pb为单体氢镍电池功率;U为单体氢镍电池电压;R为单体氢镍电池电阻。
由式(10)可得Ps≥58.480 kW,单体氢镍电池电压为1.2 V,一般氢镍电池6个为一组,每组电压为7.2 V,由式(12)得出ns=189.519。此处取整,则该车氢镍电池组为192组。
2.5.2氢镍电池电量计算
氢镍电池功率需满足汽车纯电动低速巡航要求,该功率由式(1)求得,蓄电池的电容计算公式为:
式中:ve为汽车纯电动低速巡航速度;Q为蓄电池的容量;Qb为蓄电池电能;ηb为电池组效率;ηm为主电机传动效率;Ub为工作电压;SH、SL为SOC上下限值;PB为满足汽车纯电动低速巡航时所需瞬时功率;L为纯电动模式续航里程。
由式(13)和(14)得出PB=6.888 kW、Qb=5 740 Wh、Q≥24.282 Ah。由于ns=192,单体氢镍电池组电压为7.2 V,电容为9 Ah,综合考虑将192组电池平均分成3组,每组64个,64个氢镍电池组串联,再将3组并联,基本参数如表6所示[7]。

表6 氢镍电池参数表
3 整车性能仿真
3.1建立仿真模型
本文运用CRUISE软件对该车混合动力系统建立整车模型,根据动力总成结构依次建立发动机、ISG电机、驱动电机、氢镍电池、行星排等部件模块,建立各个部件的电气连接、机械连接以及信号连接,以确定各部件之间的能量传递关系及信号命令传输路径,整车模型如图2所示。
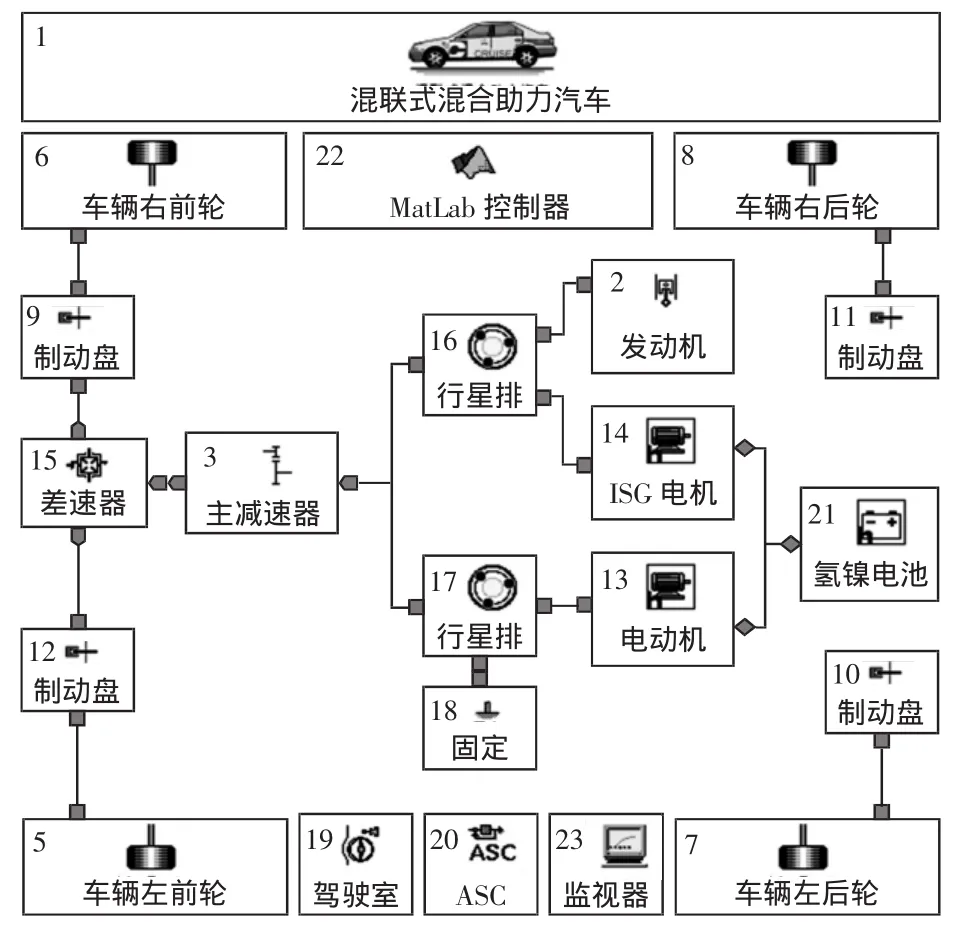
图2 混联式混合动力汽车动力系统总成
图2中,发动机、ISG电机及驱动电机由2个行星排进行动力分配及动力复合,输入表1中的汽车基本参数及本文所匹配的各个部件参数值。
3.2计算任务设定
建立整车模型后,根据设计需要设定计算任务进行仿真。对混合动力汽车动力系统设计的关键在于在满足汽车动力性要求的前提下,以提高汽车燃油经济性、降低汽车尾气排放为目标,所以主要计算任务为动力性能仿真和燃油经济性仿真。动力性能仿真任务包括汽车的最高车速、百米加速时间、最大爬坡度;汽车燃油经济性任务,需要选定一种测试工况,本文选取欧洲NEDC循环工况作为测试工况,在cycle run任务下写入NEDC测试工况mat数据文件。
3.3仿真结果分析
运用CRUISE软件对该混合动力汽车进行仿真,并选择2款市场上的HEV的动力性与经济性进行对比,结果如表7所示。
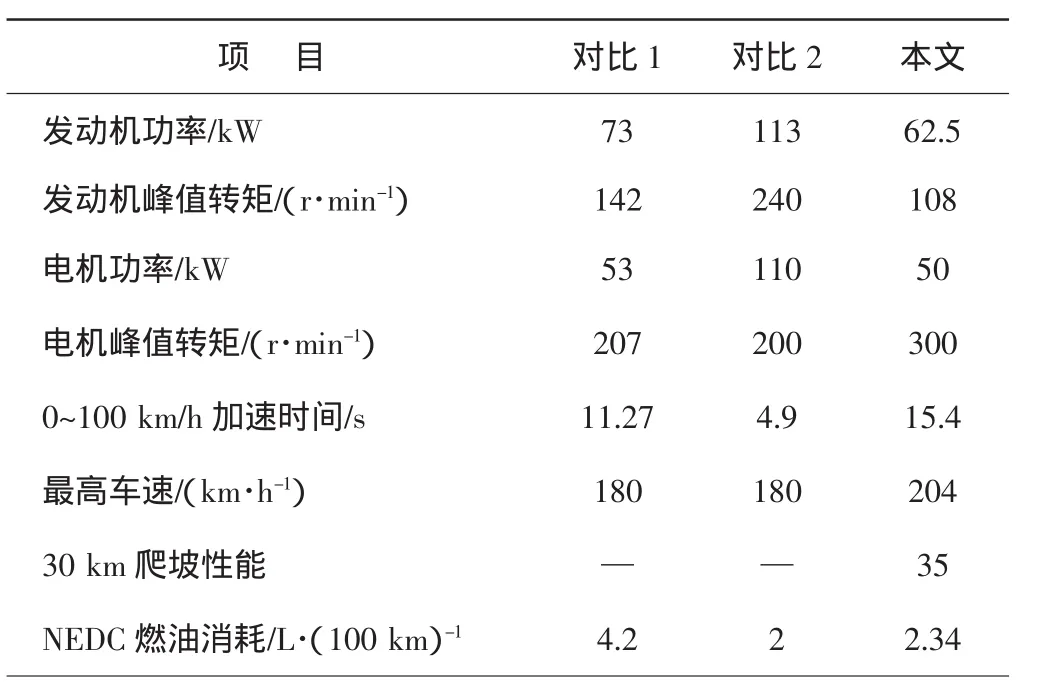
表7 混合动力模型仿真结果
(1)由动力性仿真结果可知,该汽车模型动力性能满足最初的设计指标,说明混合动力系统总成及动力装置选型及匹配合理。
(2)与对比车1相比,本文设计的PSHEV最高车速高出13.3%,百米加速性能较差,这是由于动力源功率相对较低、传动比设置及整车功率提升较慢所致;NEDC循环工况下燃油消耗为2.34 L/km,油耗降低44.29%,主要是由于本文发动机排量及功率较低。
(3)与对比车2相比,本文PSHEV最高车速依旧较高,这主要是由于传动比的设置原因;百米加速性能相对较差,这是由于发动机及电机功率均较低的原因;油耗虽然略高17%,但2.34 L/km的油耗在目前混合动力汽车中依旧相对较低。
(4)PSHEV速度跟随曲线如图3所示。由图3可知,该混合动力汽车实际车速与期望车速基本吻合,表明该汽车模型对仿真工况车速变化具有良好的跟随性,也证明了该仿真模型的正确性。
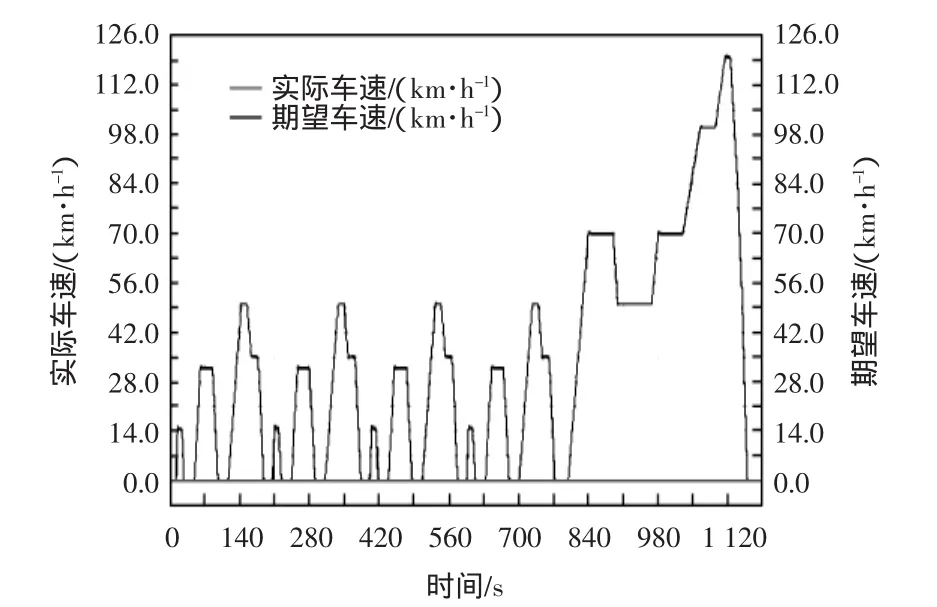
图3 NEDC仿真PSHEV速度跟随
4 结束语
本文对以双行星排为动力分配及复合装置的混联式混合动力汽车部件进行了选型及参数匹配设计,运用CRUISE软件建立了混合动力系统整车模型,并进行了性能仿真,验证了参数匹配设计的合理性。仿真结果表明:本文设计的该款车型相对于对比车1最高车速较高,百米加速性能略差,但是燃油经济性更好;与对比车2相比最高车速较高,百米加速性能相对较差,燃油经济性略低。上述研究表明该车具有可行性,有一定的市场竞争力,可实现的混合度较高,对燃油经济性的改善较好。
[1]史程.混合动力汽车的发展现状与未来[J].黑龙江生态工程职业学院学报,2012,25(4):46-47.
[2]孙元涛,王亮,石伟,等.混联式混合动力汽车动力系统参数匹配的研究[J].黑龙江工程学院学报,2014,28(6):21-28.
[3]余志生.汽车理论[M].北京:机械工业出版社,2009.
[4]MI C,MASRUR M A,GAO W Z.混合动力电动汽车原理及应用前景[M].赵志国,姜娇龙,译.北京:机械工业出版社,2013.
[5]王兴.基于CRUISE的混联混合动力客车建模与仿真研究[D].郑州:郑州大学,2013.
[6]魏朝阳.并联混合动力汽车驱动系统参数设计及匹配研究[D].重庆:重庆交通大学,2014.
[7]王喜明,郭志军,李忠利,等.混合动力汽车动力电池组参数匹配[J].河南科技大学学报:自然科学版,2011,32(4):19-23.
Parameter matching and performance simulating of series/parallel hybrid electric vehicle
SHI Hong1,ZHANG Lei2
(1.School of Mechanical Engineering,Tianjin University of Technology and Education,Tianjin 300222,China;2.School of Automobile and Transportation,Tianjin University of Technology and Education,Tianjin 300222,China)
The dynamic components selection and parameter matching of different parts of dynamic system of PSHEV is designed in this paper.The types and parameters of the appropriate engine,power battery,ISG motor,drive motor are selected.Using CRUISE simulation platform establish the vehicle power system model and simulate its performance.The simulation results show that the dynamic system meet the design requirements,and the selection of the components and the parameters are reasonable,which provides a theoretical basis for the design of hybrid power vehicles.
series/parallel hybrid electric vehicle;parameter matching;dynamic system;CRUISE
U469.7
A
2095-0926(2016)03-0014-05
2016-03-14
天津职业技术师范大学科研发展基金项目(KJ15-08).
石洪(1989—),女,硕士研究生;张蕾(1975—),女,教授,硕士生导师,研究方向为汽车现代设计方法、故障诊断技术及计算机辅助技术.
