关断角控制在交流电机节电运行中的应用
2016-11-18张有兵谢路耀
张有兵,王 维,谢路耀,吴 寒,戚 军
(1.浙江工业大学 信息工程学院,浙江 杭州 310023;2.诺基亚通信系统技术(北京)有限公司浙江分公司,浙江 杭州 310052)
关断角控制在交流电机节电运行中的应用
张有兵1,王 维1,谢路耀1,吴 寒2,戚 军1
(1.浙江工业大学 信息工程学院,浙江 杭州 310023;2.诺基亚通信系统技术(北京)有限公司浙江分公司,浙江 杭州 310052)
对于长期运行在负载变化大、平均负载率低的电机,会造成巨大的电能消耗.采用降压节能的方法,通过晶闸管调压电路,适当地减少电机端电压,从而达到在不改变电机转速以满足特定工况转速要求的情况下减少不必要的电能消耗的目的.为了避免电机震荡现象,采用以电流关断时刻为基准的晶闸管关断角控制方法,通过理论分析及建模仿真,证实了该方法在节电运行中的可行性.结合模糊控制,提出了关断角模糊控制方法,并研制节电装置样机进行了实验验证.结果表明:关断角控制策略是正确有效的,能够使电机稳定运行,不出现震荡现象,所采用的模糊控制方法能较好地响应负载变化.通过对比是否使用节电装置所消耗的功率情况,得出该节电装置具有较好的节电效果,在空载运行时效果最佳.
三相异步电机;关断角;模糊控制;晶闸管
电机在满载或重载情况下,电机效率、功率因数较高,而在轻载或空载时,电机的运行效率与功率因数却很低,造成了不必要的能量浪费.因此,需要对电机进行节能,提高运行效率.已有的文献对电机控制进行了各种研究,取得了丰硕的成果.有的文献通过功率因数控制电机[1-3],有的文献通过模糊控制算法实现对电机的节电控制[4-6],这两类方法都能取得较好的控制效果,但是由于使用的是触发角控制方法,必须实时监控功率因数角的变化量来计算触发角增量,公式复杂,控制较为繁琐;有的文献指出空载以及轻载情况下触发角控制在软启动过程中会引发震荡[7-9].与传统的触发角控制策略相比,采用关断角控制策略,能有效地避免电机震荡.在理论分析的基础上,仿真验证了关断角控制策略的正确性,并将关断角与模糊控制相结合,提出了关断角模糊控制方法,通过样机实验验证了其合理性,同时给出了该节电装置的节能效果.
1 异步电机节电装置节能原理
1.1 降压节能原理


图1 三相异步电机T型等效电路Fig.1 The T-type equivalent circuri of three-phase induction motor
异步电机的损耗主要有定子铜损pCu1、转子铜损pCu2、铁芯中磁场产生的涡流和磁滞损耗pFe、轴承转动所引起的机械损耗pmec以及负载杂散附加损耗pad[10].
端电压与定子电流关系为
(1)
定子电阻产生的定子铜损耗为
(2)
励磁电阻上产生的铁损耗为
(3)
转子产生的铜损耗为
(4)
在转速稳定的情况下,式(2~4)中,定子铜损、铁损和转子铜损均与端电压的平方成正比;式(1)中,端电压与定子电流成正比.因此,适当降低定子端电压,相电流会相应减小,同时可以减少铜损和铁损,从而降低电机损耗,达到节能的目的.
1.2 关断角控制
关断角控制,是指以晶闸管相电流过零关断时刻为基准,延迟一定的角度(即关断角),触发相应的晶闸管.晶闸管关断角控制示意图如图2所示,其中:α为关断角;θ为晶闸管导通角;φ为续流角.

图2 单相晶闸管关断角控制示意图Fig.2 The phase voltage sketch map of the thyristorcontrolled by hold-off angle
由图2可得出单相晶闸管调压电路的输出电压为

(5)

由式(5)可知:经过晶闸管调压电路后加载在电机端的电压U1与关断角α、续流角φ有关,式(5)是关于α单调递减函数,即α越大U1越小,故通过增大关断角α可以降低U1,而根据1.1的分析,定子端电压U1的降低,会使相电流减小,因此关断角对晶闸管输出电压的影响可以通过相电流反映.
电磁转矩公式为
(6)

由式(6)可知:电机稳定运行时,电磁转矩与电压成正比.又因电磁转矩与负载转矩正相关,所以随着负载的增加,为保证电机有足够转矩应对负载变化的最小电压将会变大,即关断角的可取最大值会随着负载的增加而减小.
2 关断角控制仿真分析
综合以上分析,选用Matlab/Simulink中的电机模块,对关断角控制策略进行建模仿真实验.空载情况下为保证电机有足够转矩应对负载的变化,通常降压后相电压U1≥130 V[11],通过仿真实验,关断角临界值近似为60°,即关断角取值范围为0°~60°.
空载情况下,为了验证关断角与输出电压的关系,分别选取关断角0°,30°以及55°进行仿真,仿真结果如图3,4所示.3种关断角情况下,电机转速都在1 500 r/min附近稳定运行,而在空载情况下采用触发角进行降压控制,电机会出现转速以及电流震荡[8],说明关断角控制较传统触发角控制稳定.通过比对关断角0°,30°以及55°时的电流波形可知,随着关断角的增加,相电流减小,由式(1)可知相电流与定子端电压成正比,因此关断角增加会导致端电压减小,这与1.2节中的分析一致.又因为定子端电压的平方与电机铜损与铁损成正比,所以端电压越小,电机铜损与铁损越少,电机消耗的电能就越少,节电效果也就越明显.

图3 空载时关断角控制的转速仿真结果Fig.3 No-load simulation results of motor speed controlled by hold-off angle
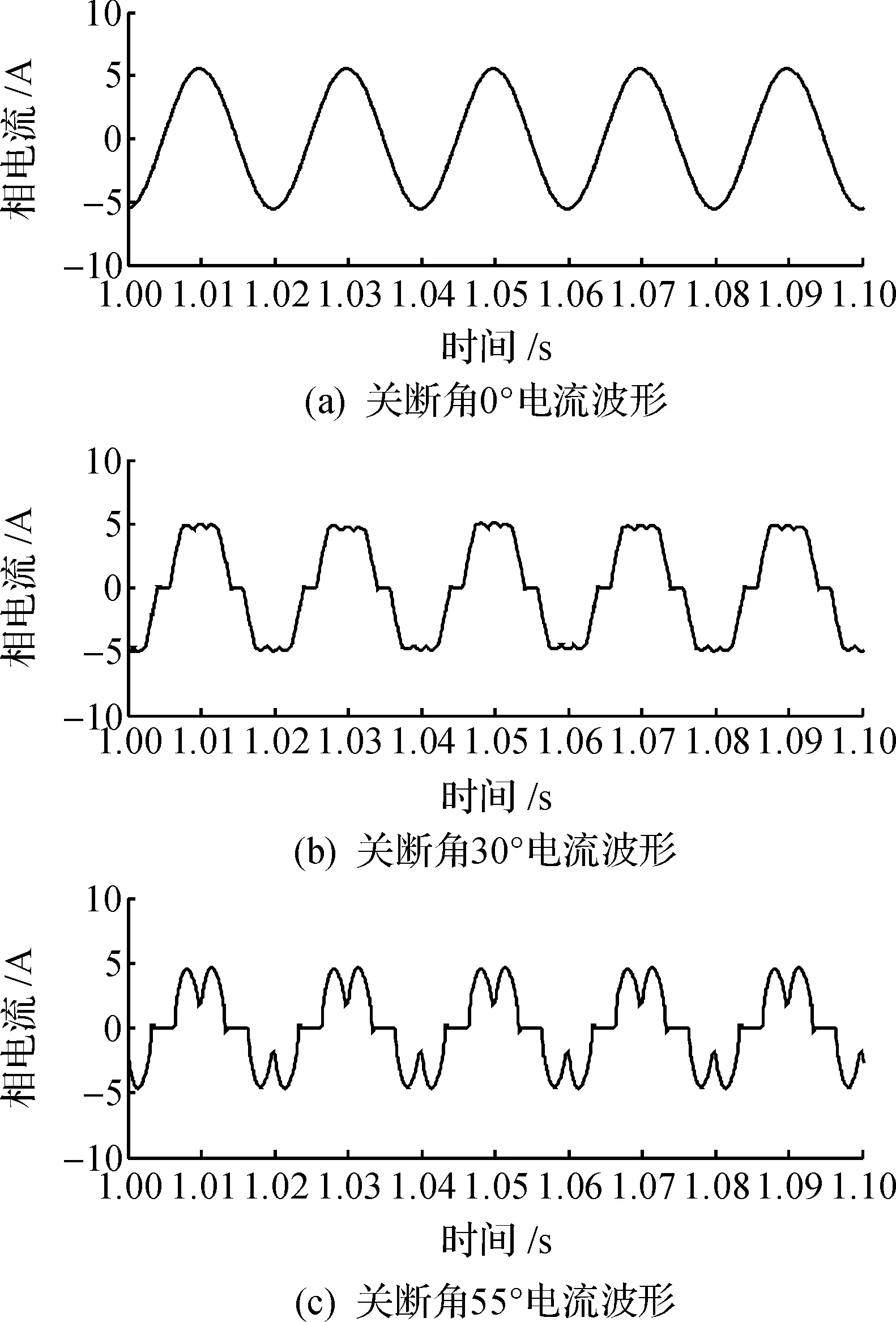
图4 空载时关断角控制的电流仿真结果Fig.4 No-load simulation results of current controcled by hold-off angle
在不同的负载情况下,通过仿真实验,可得能使电机正常运行的最大关断角如表1所示.从表1中可以明显看出:随着负载的增加,能保证电机正常运行的最大关断角却在不断减小,当负载超过50%以后,出现了最大关断角为0°的情况.又因为电机功率因数会随着负载的增加而增加,综上可得负载增加,功率因数上升,最大关断角将会减小.

表1 负载率-最大关断角对应表
在空载情况下,以关断角0°启动1 s后关断角从0°转换为30°,模拟节电运行时关断角的动态变化,其仿真结果如图5所示.从图5中可以看出:从0°转换为30°后,没有出现震荡现象,电机转速稳定,续流角从84°重新稳定到75°,且相电流包络线平滑且幅值减小.说明关断角控制在关断角突变时不会引起电机电流与转速的震荡,且实现平稳动态增大关断角可达到有效节电.
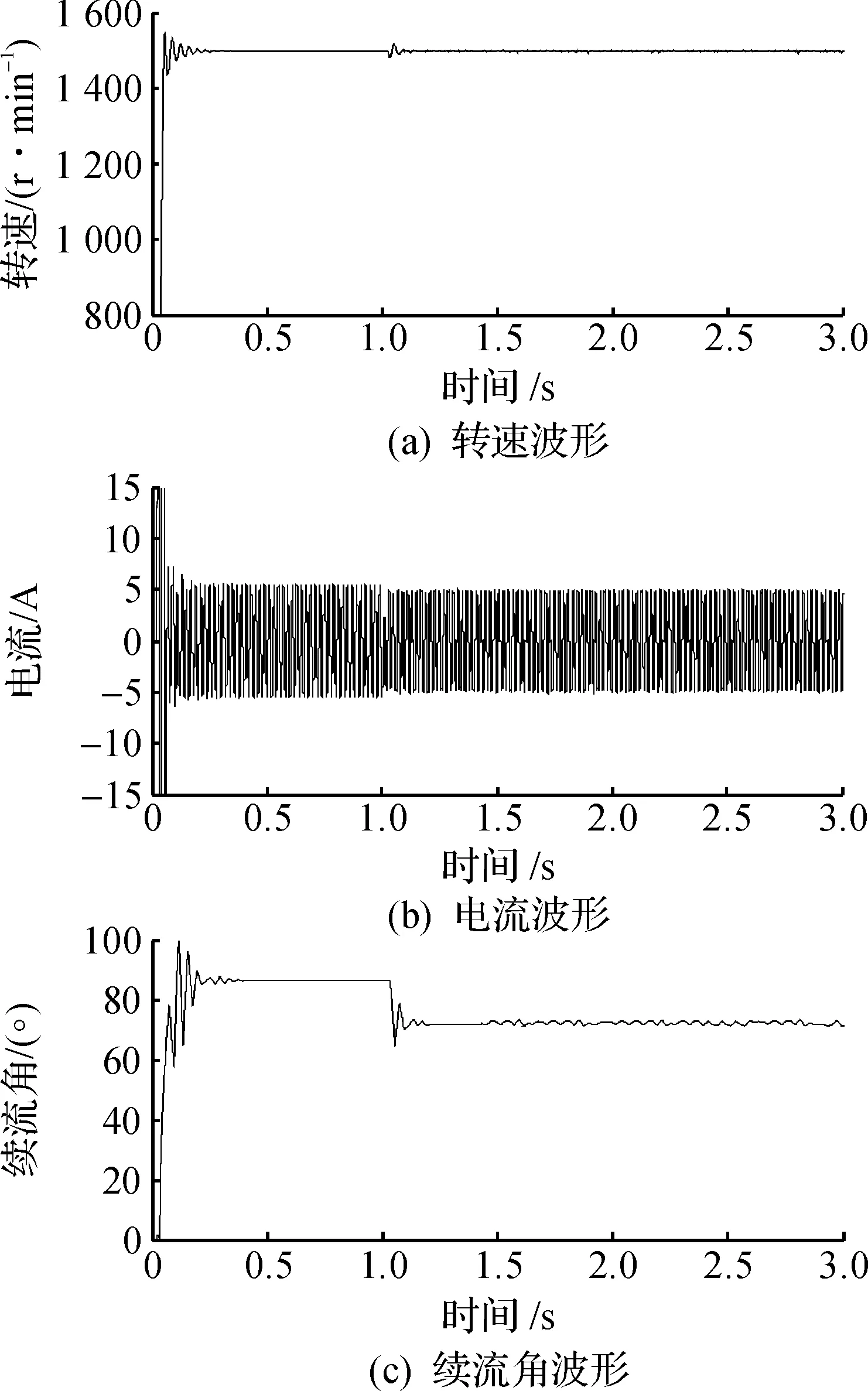
图5 关断角控制节电运行时仿真结果Fig.5 Simulation result of saving operation controlled by hold-off angle
3 关断角模糊控制
3.1 模糊控制
模糊控制系统是使用处理器来模拟人的经验,以对控制对象进行判断的一种方法.它适用于控制对象是一些非线性或者时变的系统,而且不存在一个精确的数学模型来描述控制对象[12].
图6所示为模糊控制系统示意图.被控制量需要与给定量进行比较,以得出中间的差值,再将差值转换成模糊信号,经模糊控制器计算之后,又可以得出新的被控制量.

图6 模糊控制系统示意图Fig.6 Sketch map of fuzzy control system
模糊控制器首先要定义输入量,一般的二维模糊系统中,会定义某个变量和这个变量的变化率,作为两个输入量[5],然后将输入量进行模糊化,即选择合适的隶属度来转换输入量的数值.输入量经模糊化后,控制器便调用模糊规则,所得结果为输出量的模糊值,再采用适当的解模糊方法,将模糊值转化成精确值,再转换成实际值送入到执行单元进行.
3.2 关断角模糊控制
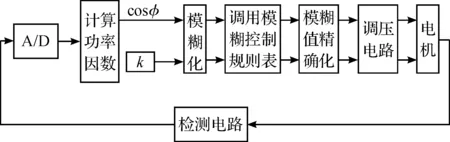
图7 关断角模糊控制流程Fig.7 Fuzzy control flow of hold-off angle
不失一般性,模糊控制隶属函数取值为正大(PB)、正中(PM)、正小(PS)、零(ZE)、负小(NS)、负中(NM)、负大(NB)[13].为了保证模糊变量各个子集能较好地覆盖整个论域,避免失控,功率因数cosφ、功率因数变化率k以及关断角α的模糊论域均取{PB,PM,PS,ZE,NS,NM,NB}.
根据专家经验、控制工程知识,并结合表1及其结论,建立表2的模糊控制规则表.当已知输入模糊量后,根据模糊控制规则表进行推理并得到输出模糊量的值,再通过加权平均法将输出模糊量清晰化,再变换成实际关断角,送入调压电路.

表 2 模糊控制规则表
4 实验验证
根据以上分析,设计了一台节电装置的样机.实验样机采用STM32F103ZET6芯片,使用两路12通道ADC分别将线电压以及电流模拟信号转换成数字信号.通过电流与电压过零时间点得出的续流角得到可测功率因数角,并算出功率因数及其变化率.通过模糊控制规则可以得到关断角α,再将α的值送入定时器,使定时器输出相应PWM波,经过GAL16V8D逻辑芯片运算得出最终关断角所对应的触发脉冲,结合电流过零中断触发相应晶闸管.现选取实验室一台1.5 kW的三相异步电动机进行实验.
电机空载下设置不同关断角进行实验,实验电流波形如图8所示.随着关断角的增大,相电流减小,节电装置确实能通过改变关断角的大小控制定子端电压大小,从而达到减小电机不必要损耗的目的,与理论分析结果一致.
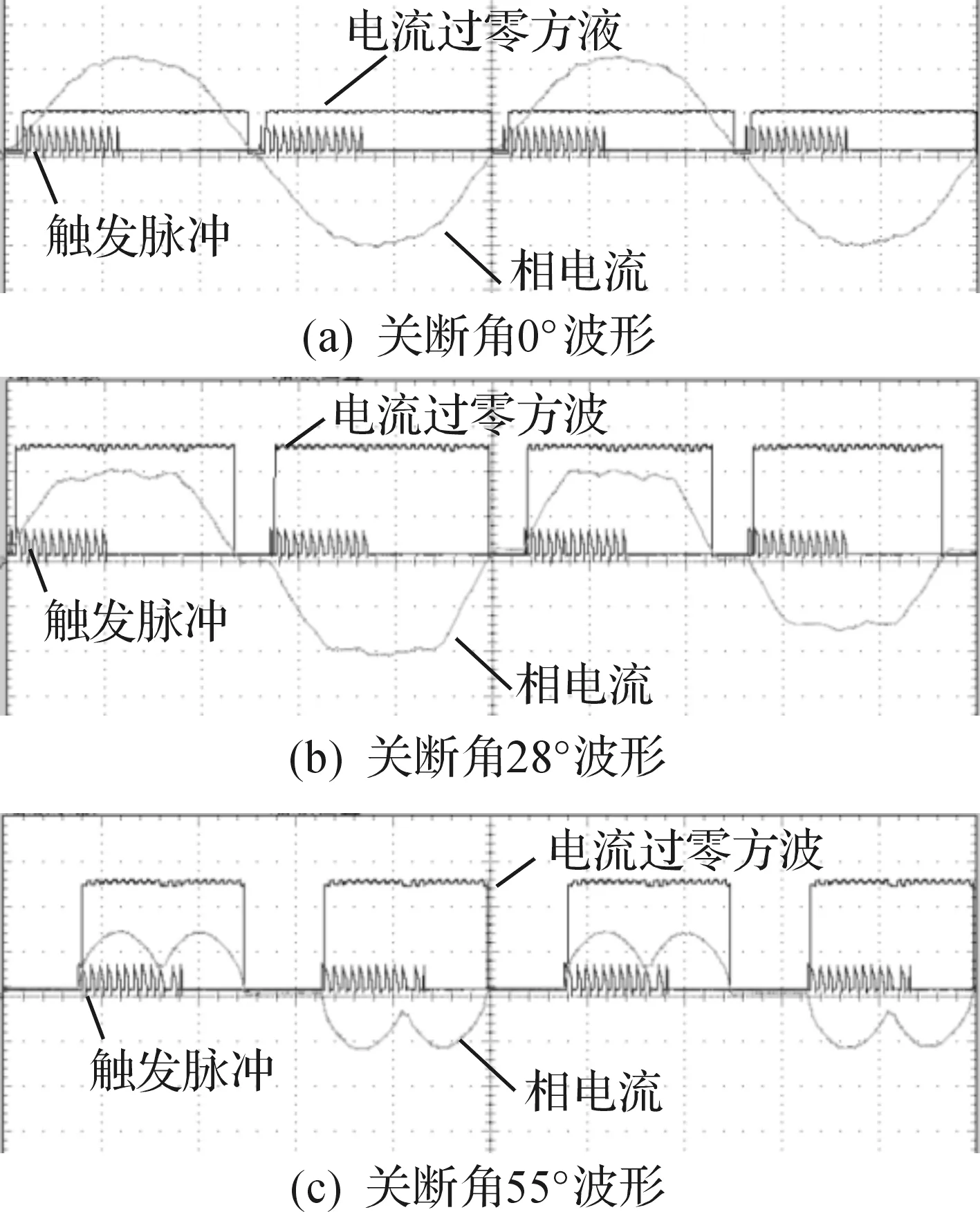
图8 样机空载实验电流波形Fig.8 The current waveform of the prototype test
结合关断角模糊控制进行样机带载实验,通过改变负载大小测试关断角模糊控制方法的效果,实验结果如图9所示.可以看出在关断角变化时,关断角模糊控制也能较好地控制电机,不会出现震荡现象,并且在负载变化时能较好地响应负载变化.

图9 模糊控制实验波形Fig.9 The waveform of fuzzy control
通过带不同负载的电机运行实验,测得在使用节电装置以及不使用节电装置情况下的功率消耗情况,如表3所示.从表3中结果可以明显看出:异步电机在轻载及空载时节能效果明显,不同负载率下节电效果不同,空载情况下节电效果达到56.6%.

表3 节能实验数据
5 结 论
通过对电机模型的理论分析可知,降低异步电机供电电压能减少电机在正常运行时不必要消耗的电能.采用晶闸管调压电路以及晶闸管关断角控制,通过理论以及仿真分析,验证了该方法在节电运行时的正确性.电机仿真运行时转速、电流稳定,避免了电机节电运行时出现的震荡现象.采用模糊控制,以功率因数及其变化率为输入量,关断角为输出量,实时修正晶闸管关断角,并且研制了实验样机.样机实验结果表明:关断角模糊控制在电机节电运行中能很好地控制电机,及时有效地响应负载变化,电流稳定,转速稳定,没有出现电流、转速以及转矩震荡的现象,并且通过比较使用节电装置和不使用节电装置时电机功率消耗情况,得出该节电装置能使电机有效节电,负载率越低节电效果越明显.
[1] 王毅,赵凯岐,徐殿国.电机软启动控制系统中功率因数角的研究[J].中国电机工程学报,2002,22(8):82-87.
[2] 常进,张曾科.感应电机恒功率因数控制的研究[J].中国电机工程学报,2002,22(11):70-74.
[3] 童军,张臻,郭昌永.电动机软启动功率因数角闭环控制技术研究[J].电机与控制,2013,17(12):51-56.
[4] 董爱华,付永丽.模糊控制算法在异步电机节电器中的应用[J].电气传动,2009,39(9):49-51.
[5] 杜江,杜太行.基于模糊控制算法的感应电动机调压节能技术[J].应用与测试,2007(5):56-60.
[6] 杨荣秀.基于模糊控制的电机节能控制器的研究设计[J].中国高新计数企业,2016(6):90-91.
[7] 王玉峰,马广程,王常虹,等.晶闸管控制感应电机软启动过程中振荡现象研究[J].电机与控制学报,2002,6(3):186-190.
[8] 孙津济,房建成,王建民.异步电机软启动过程中的震荡[J].电工技术学报,2007,22(2):15-21.
[9] 刘恩鹏,贾存良,金立,等.晶闸管控制异步电机软启动过程中振荡现象研究[J].电气传动,2011,41(8):48-51.
[10] 赵海森.超高效异步电机损耗模型及降耗措施研究[D].北京:华北电力大学,2011.
[11] 王玲.关断角控制型软启动的简化分析与仿真[J].电子科技,2012,25(5):66-69.
[12] 诸静.模糊控制原理与应用[M].北京:机械工业出版社,2001.
[13] 李伟,詹方勇,徐敏界.ELID磨削的智能加工技术[J].浙江工业大学学报,2015,43(1):39-42.
(责任编辑:刘 岩)
Application of hold-off angle control in the power saving operation of three phase asynchronous motor
ZHANG Youbing1, WANG Wei1, XIE Luyao1, WU Han2, QI Jun1
(1.College of Information Engineering, Zhejiang University of Technology, Hangzhou 310023, China;2.NOKIA Communication System Technology (Beijing) Co., Ltd., Hangzhou 310052, China)
It will cause great power consumption when three phase asynchronous motors run in the condition of load changing in a wide range and average load rate in low levwl. Method of depressurizing and saving energy can be used. Through the thyristor voltage regulator circuit, the motor terminal voltage is appropriately reduced and the purpose of reducing unnecessary power consumption will be achieved on the specific working condition which requires constant speed. In order to avoid motor oscillation, a method of hold-off angle based on the current zero-crossing time as reference is used. The method is proved to be feasible in the saving operation through theoretical analysis and simulation. Combining with fuzzy control, a method of hold-off angle fuzzy control is proposed. The energy-saving devices prototype is developed for experimental verification. The experiment results show that the method of hold-off angle control is correct and effective. This method makes motors run stably and avoid motor oscillation. The method of hold-off angle fuzzy control will response to load changes appropriately. The device has good effect on power saving when motors run in the no-load condition.
three phase asynchronous motor; hold-off angle; fuzzy control; thyristor
2016-03-03
国家自然科学基金资助项目(51407160);浙江省自然科学基金资助项目(LY16E07005,LQ14E07001)
张有兵(1971—),男,湖北大冶人,教授,博士生导师,研究方向为智能电网、分布发电及新能源优化控制、电动汽车入网、电力系统通信和电能质量监控等,E-mail:youbingzhang@zjut.edu.cn.
TP273
A
1006-4303(2016)05-0473-05
