基于交叉补偿型转矩分配函数的开关磁阻电机转矩脉动抑制系统设计*
2016-11-17张广明王德明潘晓晨
杨 彬, 张广明, 王德明, 潘晓晨
(南京工业大学 电气工程与控制科学学院,江苏 南京 211816)
基于交叉补偿型转矩分配函数的开关磁阻电机转矩脉动抑制系统设计*
杨 彬, 张广明, 王德明, 潘晓晨
(南京工业大学 电气工程与控制科学学院,江苏 南京 211816)
针对开关磁阻电机(SRM)在高速运行时转矩脉动抑制性能不佳、调速范围受限的问题,分析了SRM高速运行的转矩特性,以及电流补偿对转矩脉动抑制效果不佳的原因。设计了交叉补偿型转矩分配函数(TSF),并采用直接转矩控制实现每一相的实际转矩对期望转矩的跟踪,使电机在中高速运行下仍能恒定输出合成转矩。仿真结果表明,基于交叉补偿型TSF法的SRM转矩控制系统具有较快的响应速度和较宽的调速范围。
开关磁阻电机; 直接转矩控制; 转矩分配函数; 交叉补偿
0 引 言
开关磁阻电机(Switched Reluctance Motor, SRM)结构上类似于反应式步进电动机,是一个双凸极变磁阻电动机,转子上既无绕组,又无永磁体,只在定子极上绕有集中绕组,由相距π/q空间角度的2q个磁极绕组串联(或并联)构成一相绕组[1- 4]。它的特殊物理构成决定了具有以下优势: 结构坚固、简单、成本低;热耗大部分产生在定子侧,易于冷却;各相绕组和磁路相互独立,系统可靠性高,容错能力强;控制参数多,控制方式灵活。因此,SRM成为当代电气传动领域的热门课题之一。SRM具有非线性的电磁特性且定子为凸极结构,但也造成了SRM的主要缺陷——转矩脉动大,在换相过程中,这种现象尤为明显。转矩脉动会直接影响SRM驱动系统的输出特性,易引起电机速度的振荡,在实际应用场合中是不容忽略的问题。针对于此,国内外学者提出了许多方法,取得了较显著的进展。
目前,SRM转矩脉动抑制问题的研究主要从以下两个解决途径入手: 一是优化电机本体的电磁设计,改善定、转子磁极结构,并合理设置其参数以减小电机的转矩脉动[5-6];但是该途径会影响电机本身的性能,甚至降低电机的效率,只在特定场合可以应用,不宜于电机的使用和推广。另一个是引用合适的电机控制技术抑制转矩脉动。本文选择后者,设计合适的控制策略来抑制SRM的转矩脉动。
目前,应用于抑制转矩脉动较为广泛的一类算法是转矩分配函数(Torque Sharing Function, TSF)法。它是使用预存的最优TSF和电流滞环控制器,规划每相的电流以便使合成转矩达到期望转矩[7-10]。但是TSF法离线计算导致系统稳定性降低。为了克服这些缺陷,本文系统设计了交叉补偿型TSF,提高了其自身的自适应能力使得在高速运行下仍能保持较好的转矩脉动抑制性能。
1 SRM数学模型
对于整个系统的控制对象,本文选用6/4极三相SRM。在建模时,传统的转矩控制方法没有考虑SRM的非线性电磁特性,为了实现高精度控制和包括电机本体设计、功率变换器设计在内的SRM驱动系统整体优化设计,必须建立SRM的非线性模型。根据SRM的基本方程可以建立数学模型。其基本方程包括电流方程、电压方程、机械方程和运动方程,如式(1)~式(4)所示:
(1)
(2)
(3)
(4)
式中:uk——第k相绕组的外加电压;
ik——第k相绕组的电流;
Rk——第k相绕组的电阻;
Lk(θ,ik)——第k相绕组的电感,在SRM中,是关于θ和ik的非线性函数;
θ——转子位置角;
Ttotal——SRM的电磁转矩;
TL——SRM的负载转矩;
J——SRM转子及负载的转动惯量;
D——黏性摩擦因数;
ω——转子转速。
由于电感是关于转子位置角θ和相电流的非线性函数,难以用确定的函数表示,所以本文采用基于特殊位置磁化曲线的磁链分区解析拟合[11]的方法。此方法的重要基础是确定4个特殊转子位置:θu=0(定子凸极与转子凹槽中心重合位置)、θa=π/Nr(定、转子凸极中心完全对齐位置)、θ2(转子极前沿与定子极后沿相遇位置)、θhr(转子极前沿与定子极中心线重合位置)。由电机的物理结构确定出这4个位置后,对磁链进行分区解析模拟。
A区(θu≤θ≤θ2)的磁化曲线采用修改的形式函数拟合,表达式如下:
(5)
A=kaB
B=-(1-c)(θ2-θu)c
B区(θ2≤θ≤θhr)采用直线拟合,即:
Ψ=Ψ2+ka(θ-θ2)
(6)
C区(θhr≤θ≤θa)的磁化曲线仍采用修改的形式函数拟合,即:
(7)
其中:
A′=kaB′
B′=-(1-c′)(θa-θhr)c′
应用磁链与电感的关系式(2)和磁链分区解析表达式(5)~式(7)可计算样机第k相的不同电流、不同位置下相电感L(ik,θ),给出相电感三维模型图如图1所示。
图1 SRM非线性电感三维模型
2 预设型TSF的SRM转矩控制系统
基于预设型TSF的SRM转矩控制系统换相时转矩脉动尤为明显的现象,以合成瞬时转矩恒定为目标,通过TSF分配各相在不同位置的期望转矩,并通过电流补偿使合成的瞬时转矩跟踪指令转矩。其系统结构如图2所示[11-13]。
图2 基于预设型TSF的SRM转矩控制系统
2.1 传统的TSF设计
在SRM相绕组换相过程中,若按常规的控制方法开通、关断相电流,那么,往往开通相形成的转矩增加量将不足以抵偿关断相引起的转矩减小量,将导致合成转矩在这一过程明显跌落。这就是为何转矩脉动现象在换相过程中尤为明显的主要原因。针对以上这种问题,TSF法以合成的瞬时转矩恒定为目标,通过TSF分配各相在不同位置的期望转矩以实现转矩脉动的最小化。
定义第k相TSF为fk(θ),那么根据TSF的控制目标,有
(8)
式中:Tk(θ)——第k相的瞬时转矩参考值;
Tref——合成瞬时转矩的参考值;
m——SRM的相数。
典型的TSF有直线型、指数型、正弦型、立方型四种,主要分为两个区域: 正常工作区域,此时电机仅有一相转子绕组通电,独立产生输出转矩;换相区域,此时电机的相邻两相转子绕组都有电流通过,共同产生输出转矩。以铜损耗最小和调速范围最大为优化目标,可选择正弦型TSF,在一个转子角周期τr内,其第k相转矩的TSF为
(9)
式中:θon——开通角;
θoff——原导通相按TSF所设定规律开始减小电磁转矩的起始位置角;
θov——相邻两相电流重叠的角度。
θov满足式(10)要求:
(10)
2.2 转矩仿真波形
对于3倍额定转速,即给定角速度为471rad/s的转矩仿真波形如图3所示。
图3 转矩仿真波形
图3(a)给出了SRM角速度上升至471rad/s并稳定运行的整个过程的转矩动态仿真波形。由图3(a)不难看出,随着转速上升,转矩脉动又变得剧烈。为了直观地显示这一现象,图3(b)和图3(c)分别给出了第0.045s处和第0.245s处的转矩仿真波形,分别对应的角速度为70rad/s和380rad/s。
2.3 电流补偿分析
采取预设型TSF法分配各相转矩,在高速运行下的最大限制在于实际电流的跟踪性能。一方面,系统的控制目标是每一相的期望转矩,这就对每一相的电流都要求较高的跟踪性能;另一方面,电机转速上升,换相频繁,换相时间缩短,电流实际的响应时间缩短,如图4所示。低速时,电流上升区间约有0.0011s,而高速时电流上升区间只有0.0004s,就难以保证良好的跟踪性能。
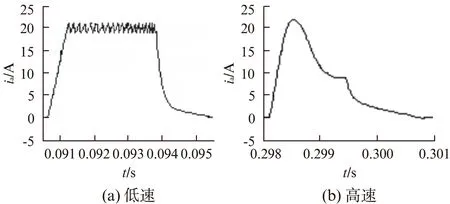
图4 低速运行与高速运行时的电流仿真波形
从物理的角度分析原因如下: 如图5所示,以SRM的A相主电路为例,当V1、V2同时导通,VD1、VD2截止,A相绕组单独通电;当A相绕组依据指令开始断电,SRM进入换相阶段。由图5可以看出虽然V1、V2全部关断,但电机绕组为感性负载,在续流二极管的作用下,此时绕组作为电源,A相绕组仍有电流通过,而且A相正处于定凸极转子逐渐远离的状态,由电流通过绕组产生的电感仍然很大,所产生的转矩会大于电机换相区的A相期望转矩,与此同时,B相的定转子凸极则处在逐渐接近的状态,但在这个过程的一开始,由于电感值很小,所产生的转矩会低于B相的期望转矩值。
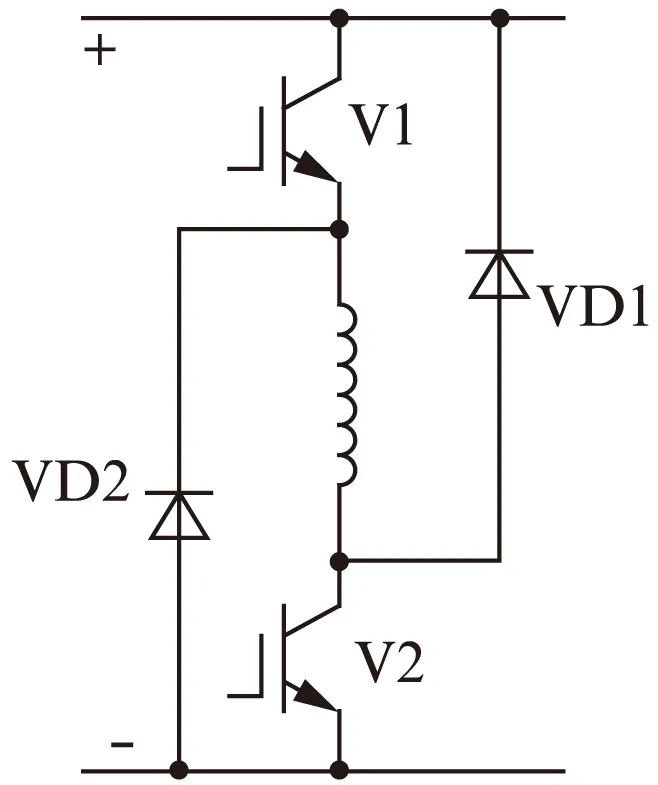
图5 不对称半桥拓扑结构式功率变换器的SRM的A相主电路
从数学的角度分析原因如下: 由电路方程式(1)可得关于电流变化率的关系式
(11)
由于电流对于磁链的加、减速变化有一个一阶的延迟,所以存在滞后效应,使得在SRM高速运行时,电流补偿效果明显下降。由上述分析可知SRM高速运行时采取电流补偿的形式以实现实际转矩对期望转矩的跟踪已不再合适。
2.4 转矩控制分析
前文分析了电流补偿的工作过程,由式(11)得出电流响应滞后的问题,但反过来看,电流滞后磁链的变化,也就是说,当绕组的磁链在变化时,绕组电流可认为是一个恒定值,说明高速运行下对磁链的控制更易于实现。瞬时转矩是磁链关于电流的积分,此时由于电流滞后的现象,可将电流视为恒值,所以有
(12)
可见在高速情况下,通过对转矩及磁链的控制来实现对期望转矩的跟踪将更易于实现。由式(12)可知,只要改变磁链的变化率,就能达到改变转矩大小的目的。这个过程中不需要考虑电流因素的影响。

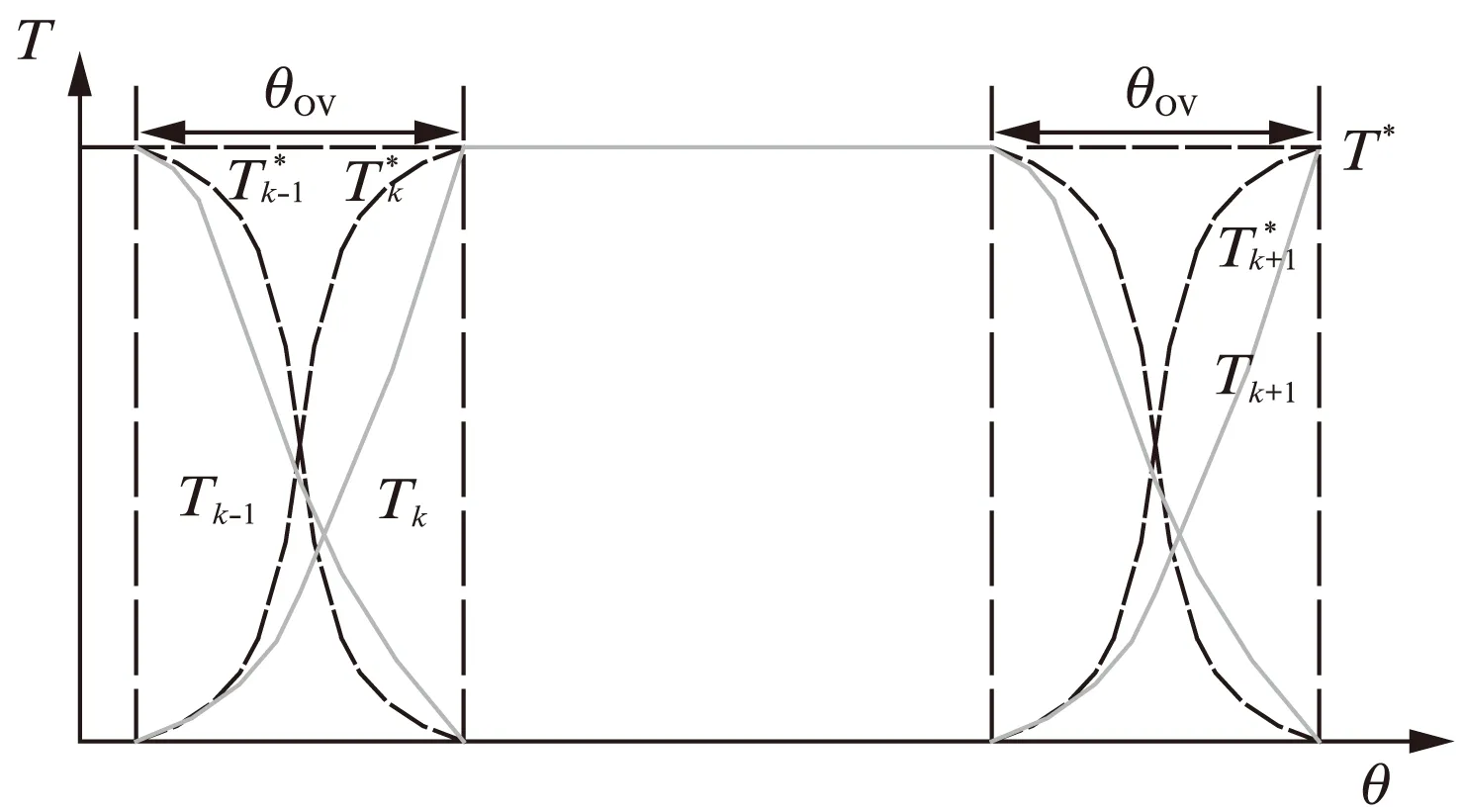
图6 正弦型TSF转矩分配过程
3 交叉补偿型TSF设计
在SRM高速运行时,让每相的实际转矩跟踪预设期望转矩是难以实现的,这样想保证合成转矩的恒定无脉动必然困难。若将每一相的转矩控制目标最终看作为单一的合成转矩控制目标,而各个相只是作为这一控制器的不同输入变量,则可以将多输入多输出控制系统转化为多输入单一输出控制系统,这样既简化系统的结构,又易于实现。因为只要保证在换相区间的合成转矩趋近于恒定值,便能起到转矩脉动抑制的效果,而这一过程的各个相转矩输出是否与对应的转矩期望值一致并不重要。
依据上述控制思想,本文设计了基于交叉补偿的TSF,工作原理是合成转矩期望值分别减去相邻两相的实际转矩,将得到转矩值作为另一相的转矩期望值,交叉补偿的形式将各相转矩逼近期望值,实现合成转矩的恒定无脉动。这种TSF在换相区转矩分配的算法逻辑为
(13)
式中:T*——合成转矩期望值;

Tk-1off、Tk+1on——分别代表第k-1相关断时和第k+1相开通时在换相区的实际转矩值。

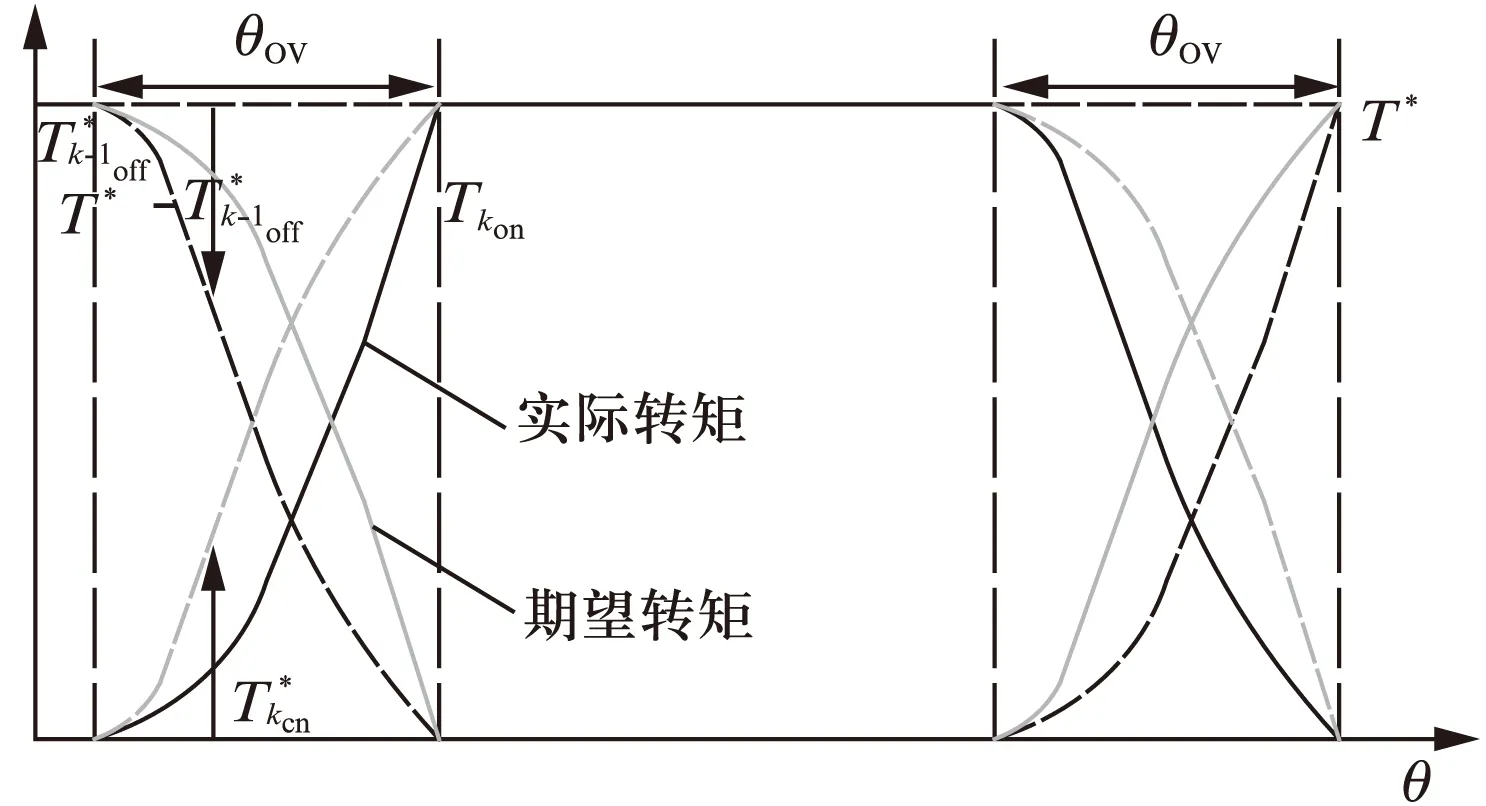
图7 交叉补偿型转矩分配函数的工作过程
依据上述分析的交叉补偿型TSF的算法逻辑与工作过程,TSF的表达式为
(14)
由于SRM的转子既无通电绕组,亦不存在换向器与之连接,所以其控制目标主要为定子侧,而DTC只对电机定子侧实施控制。此外由电流补偿分析可知,磁链由于电流的滞后效应,作为被控量更易于实施控制,所以为了在高速运行情况下实现实际转矩对期望转矩的准确与快速跟踪,本文采用直接转矩作为系统的控制方式。本文设计的交叉补偿型TSF的转矩控制系统如图8所示。
如图8所示,基于交叉补偿型TSF的SRM转矩控制系统与预设型不同,优点在于改进了TSF
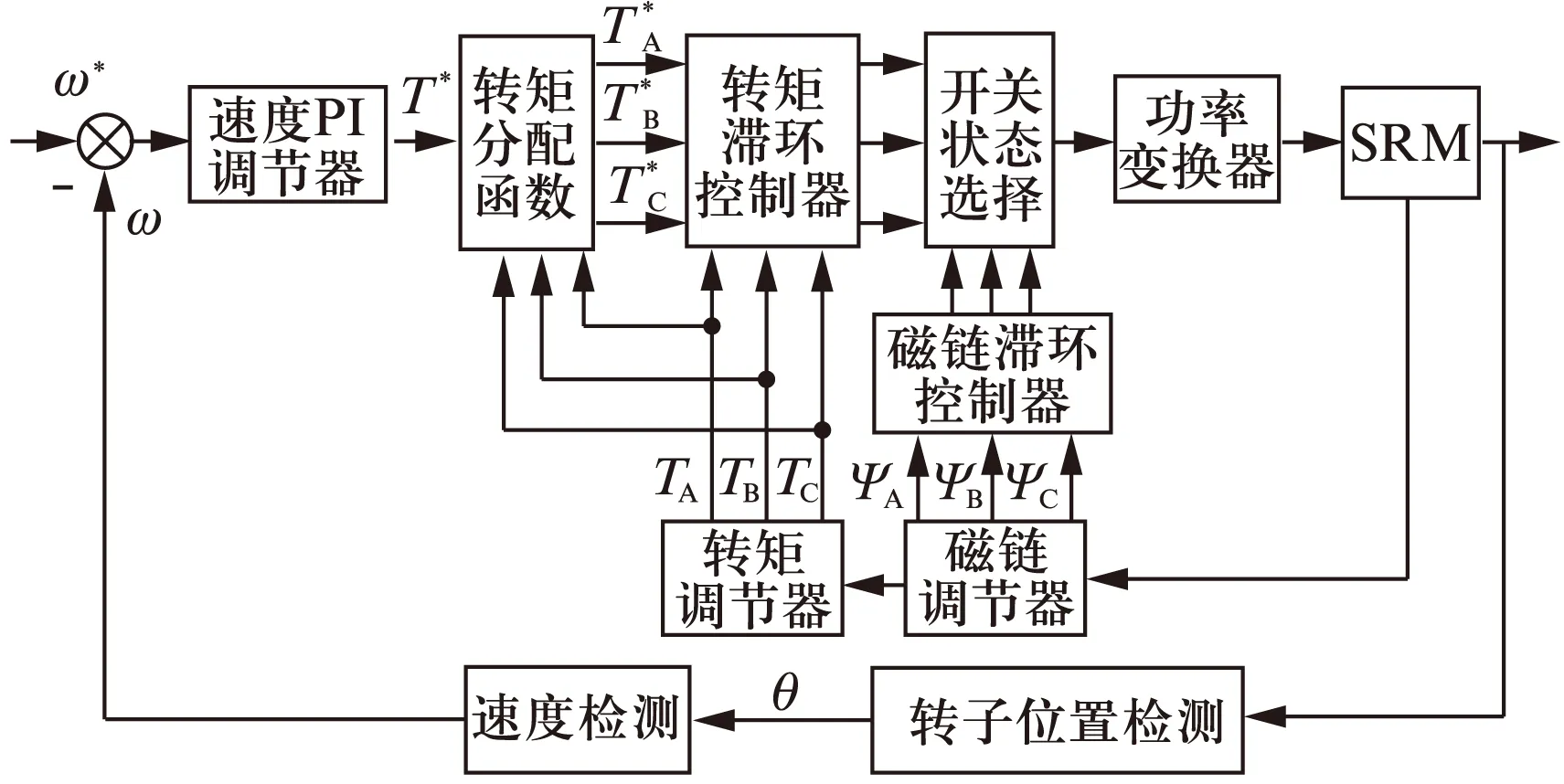
图8 基于交叉补偿型TSF的SRM转矩控制系统结构图
设计,目标为合成转矩值恒定,对相邻两相的转矩进行两两交叉补偿,使得转矩脉动抑制更易于实现;此外用转矩闭环和磁链调节取代了电流闭环,跟踪性能更好。
4 仿真结果与分析
在上述仿真模型的基础上,设置给定角速度为314rad/s(即3000r/min),负载转矩5N·m,其转速仿真波形如图9(a)所示。由图9(a)可以看出,SRM在0.18s处达到额定转速,且达到稳定状态,说明基于交叉补偿型TSF法的SRM转矩控制系统具有较快的响应速度和较宽的调速范围。系统的转矩动态仿真波形如图9(b)所示。与基于预设型TSF的SRM转矩控制系统得到的转矩波形相比,在角速度低于157rad/s(转速低于1500r/min)时,同样具有良好的转矩脉动抑制效果。随着转速上升,当角速度为157~314rad/s(转速为1500~3000r/min),换相区的转矩跌落现象得到了改善,基本保持与角速度低于157rad/s(转速低于1500r/min)时的转矩脉动抑制效果一致。角速度低于157rad/s(转速低于1500r/min)和角速度为157~314rad/s(转速为1500~3000r/min)的转矩仿真波形如图10所示。

图9 基于交叉补偿型TSF法的SRM转矩控制系统仿真结果

图10 不同转速下的转矩仿真波形图
为更直观清晰地显示出基于交叉补偿型TSF的转矩控制系统的转矩脉动抑制效果,表1给出了不采取转矩脉动抑制和采取脉动抑制控制策略的转矩脉动数据。
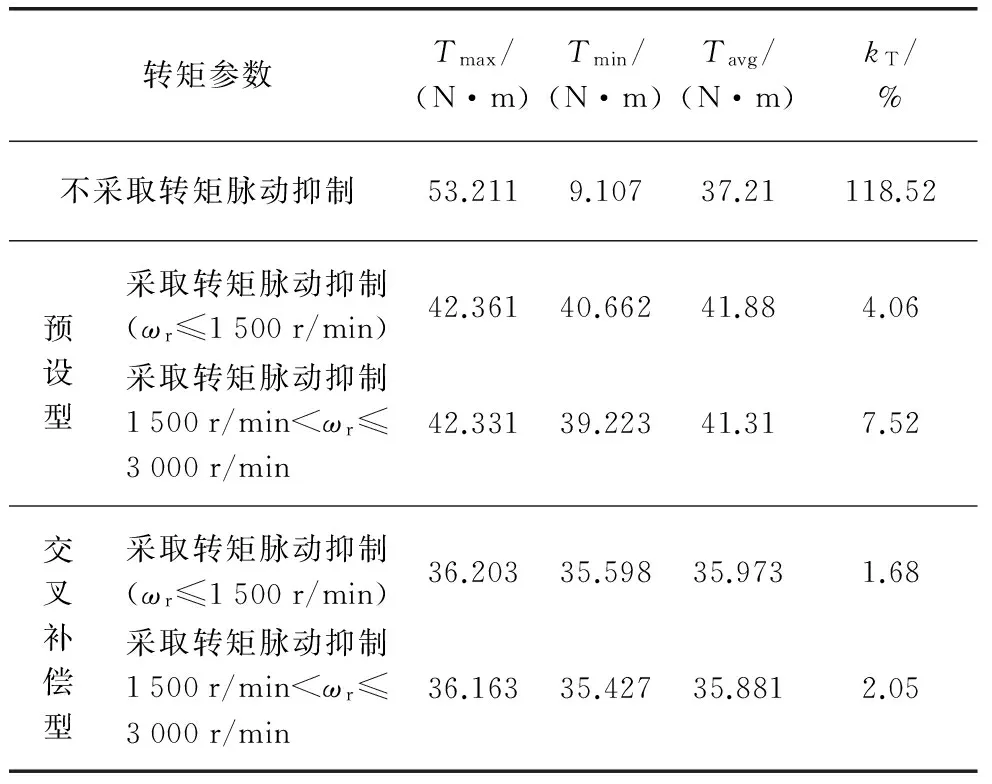
表1 转矩脉动系数kT对比
5 结 语
本文鉴于在SRM高速运行时,转矩脉动抑制性能不佳,分析了转矩特性及电流补偿对转矩脉动抑制效果不佳的原因,并设计了交叉补偿型TSF,并采用DTC实现每一相的实际转矩对期望转矩的跟踪,使电机在中高速运行下仍能恒定输出合成转矩。设计了交叉补偿型TSF的转矩控制系统,用转矩闭环和磁链调节取代了电流闭环,跟踪性能更好。最后在MATLAB/Simulink环境下搭建了基于交叉补偿型TSF的SRM转矩控制系统模型,仿真结果证明该方法使电机在中高速运行下仍能恒定输出合成转矩,有效地抑制转矩脉动。
[1] 王宏华.开关磁阻电动机调速控制技术[M].北京: 机械工业出版社,2014.
[2] 侯世昌,焦洋,魏国华,等.基于互感电压的开关磁阻电机转子初始位置检测方法[J].电机与控制应用,2014,41(5): 40- 43.
[3] 王勉华,彭田野,张朴,等.四相开关磁阻电机的四电平DITC调速系统[J].电机与控制应用,2015,42(1): 14-17.
[4] 王勉华,张朴.基于有限元法的开关磁阻电机结构优化[J].电机与控制应用,2015,42(4): 27-29.
[5] ADRIAN D C, YUSUKE F. A new torque and flux control method for switched reluctance motor drives[J]. IEEE Transactions on Power Electronics(S0885-8993), 2002,17(4): 543-557.
[6] 漆汉宏,张婷婷,李珍国.基于DITC的开关磁阻电机转矩脉动抑制仿真研究[J].系统仿真学报,2009,21(10): 3133-3138.
[7] 吴红星.开关磁阻电机系统理论与控制技术[M].北京: 中国电力出版社,2010.
[8] CASTRO J, ANDRADA P, BLANQUE B. Minimization of torque ripple in switched reluctance, motor drives using an enhanced direct instrantaneous torque control [C]∥2012 XXth International Conference on Electrical Machines (ICEM),IEEE, 2012: 1021-1026.
[9] 孙建忠,李默竹,孙斐然.开关磁阻电机的直接瞬时转矩控制研究[J].电源学报,2012(2): 21-24.
[10] 肖霄,菜森,陈雪波.三相开关磁阻电机直接转矩控制系统的研究[J].机械工程与自动化,2013(1): 148-150.
[11] MILLER T J E, MCGLIP M. Nonlinear theory of the switched reluctance motor for rapid computer-aided design [J].Electric Power Applications, IEE Proceedings B, 1990, 137(6): 337-347.
[12] 郑洪涛,陈新,蒋静坪.基于模糊神经网络开关磁阻电动机高性能转矩控制[J].控制理论与应用,2003,20(4): 541-546.
[13] 蔡燕,许镇琳,高超.基于BP神经网络的开关磁阻电动机转矩脉动控制[J].组合机床与自动化加工技术,2006(1): 38- 40.
Design of Torque Ripple Suppression System of Switched Reluctance Motor Based on Cross Compensation Torque Sharing Function*
YANGBin,ZHANGGuangming,WANGDeming,PANXiaochen
(College of Electrical Engineering and Control Science, Nanjing Tech Universtiy, Nanjing 211816, China)
The switched reluctance motor (SRM) in the high-speed operation of the torque ripple suppression performance was poor, limited range of speed regulation, analyzed the operation of high-speed switched reluctance motor torque characteristics and current compensation of torque ripple suppression effects of poor, designed the cross compensation type torque distribution function (TSF), and the implementation of direct torque control for each phase of the actual torque to the desired torque tracking, the motor could output constant torque under high-speed operation. The simulation results showed that the torque control system of SRM based on cross compensation torque distribution function had faster response speed and wider speed range.
switched reluctance motor (SRM); direct torque control(DTC); torque sharing function(TSF); cross compensation
国家自然科学基金项目(51277092)
杨 彬(1992—),男,硕士研究生,研究方向为电机控制。
张广明(1965—),男,博士研究生,教授,博士生导师,研究方向为机电系统综合控制。
TM 352
A
1673-6540(2016)10- 0046- 07
2016-04-18
王德明(1956—),男,博士研究生,教授,博士生导师,研究方向为电气工程。
潘晓晨(1991—),男,硕士研究生,研究方向为电机控制。