用于保偏光纤自动定轴的多轴精密细分驱动系统设计*
2016-11-17李慧鹏朱伟伟谭朦曦
李慧鹏, 郑 晓, 朱伟伟, 谭朦曦
(北京航空航天大学 仪器科学与光学工程学院,北京 100039)
用于保偏光纤自动定轴的多轴精密细分驱动系统设计*
李慧鹏, 郑 晓, 朱伟伟, 谭朦曦
(北京航空航天大学 仪器科学与光学工程学院,北京 100039)
保偏光纤自动定轴技术涉及光纤位置、姿态的精确定位、检测和调整,对光纤位置、姿态实时精确的调整提出了较高的要求。设计并实现了一种用于保偏光纤自动定轴的多轴步进电机细分驱动控制电路。该电路以TI公司的DSP2812为控制系统核心构架,采用DRV8846作为功率级驱动芯片,在研究步进电机控制和细分驱动原理基础上,对电流细分和自动衰减模式方案进行了设计,有效抑制电机运动过程中的噪声和机械振动,改善低频振荡、高频失步等现象,在提高步进电机运动性能的同时,实现了系统的小型化。
保偏光纤; 自动定轴; 多轴步进电机; 细分驱动
0 引 言
在保偏光纤的应用中,特别是在光纤互相连接或者与波导连接时,最为关键的是偏振主轴的探测与对轴技术,偏振主轴成功对准后才能进行保偏光纤的连接和耦合等技术。对轴精度的高低对保偏光纤器件的性能(如偏振串扰等)会造成很大的影响: 当对轴误差小于0.5°时,能够将偏振串扰有效地控制在-41dB以内[1]。光纤定轴精度直接影响光纤对轴精度,因此,对光纤的定轴精度提出了较高的要求。
目前,光纤定轴前光纤的放置通常采用人工方式,浪费人力、时间的同时,还容易对光纤带来一定的污染与损伤。为了克服人工放置带来的不足,提出光纤自动放置技术。光纤自动放置技术要求将直径为80μm光纤精确放置在长、宽、高为1.6mm×1.5mm×1.2mm的铌酸锂基片凹槽中,同样对电动位移台的位移精度和分辨率提出要求。
在几种机械驱动机构中,步进电机具有控制方式简单[2-3]、无累计误差、有利于装置或设备的小型化和低成本等优点,在工业、科研、医疗等领域得到了广泛应用[4-5]。本文在分析步进电机驱动原理的基础上,对步进电机的驱动电路进行了研究,完成了基于TI公司DSP2812+DRV8846的光纤自动定轴系统的多轴精密驱动电路设计,并对驱动电路进行了调试测试,试验结果表明该驱动电路工作可靠,满足设计需求。
1 多轴精密驱动系统总体方案
以DSP2812为核心控制单元,产生电机驱动所需要的控制信号,选用TI公司的步进电机专用集成芯片DRV8846设计功率级驱动电路。其整体框图如图1所示。
为方便更换主控电路或驱动电路,实现不同系统级设计配置,主控电路和驱动级电路分开设计制板。主控电路主要指图1中的DSP2812模块,该模块主要实现与PC机的通信和控制信号

图1 多轴精密驱动系统总体框图
的产生。同时,设计基于MFC的多轴精密电路的采集控制界面,由PC机经过RS-232发送控制指令给DSP。DSP接收控制指令,根据设置的通信协议,由DSP产生相应的脉冲、方向等控制信号,经过DRV8846驱动级电路输出实现对步进电机的驱动控制。
2 硬件电路设计
2.1 电源电路设计
(1) 主控电路电源设计。DSP2812正常工作需要+3.3V和+1.8V电源供电,本文选用了TI公司的TPS767D301电源转换芯片。主控电路电源设计如图2所示。该芯片可以实现双路电压输出,分别为+3.3V和+1.5~+5.5V范围可调输出,其中,+1.5~+5.5V具体的输出计算公式为
(1)
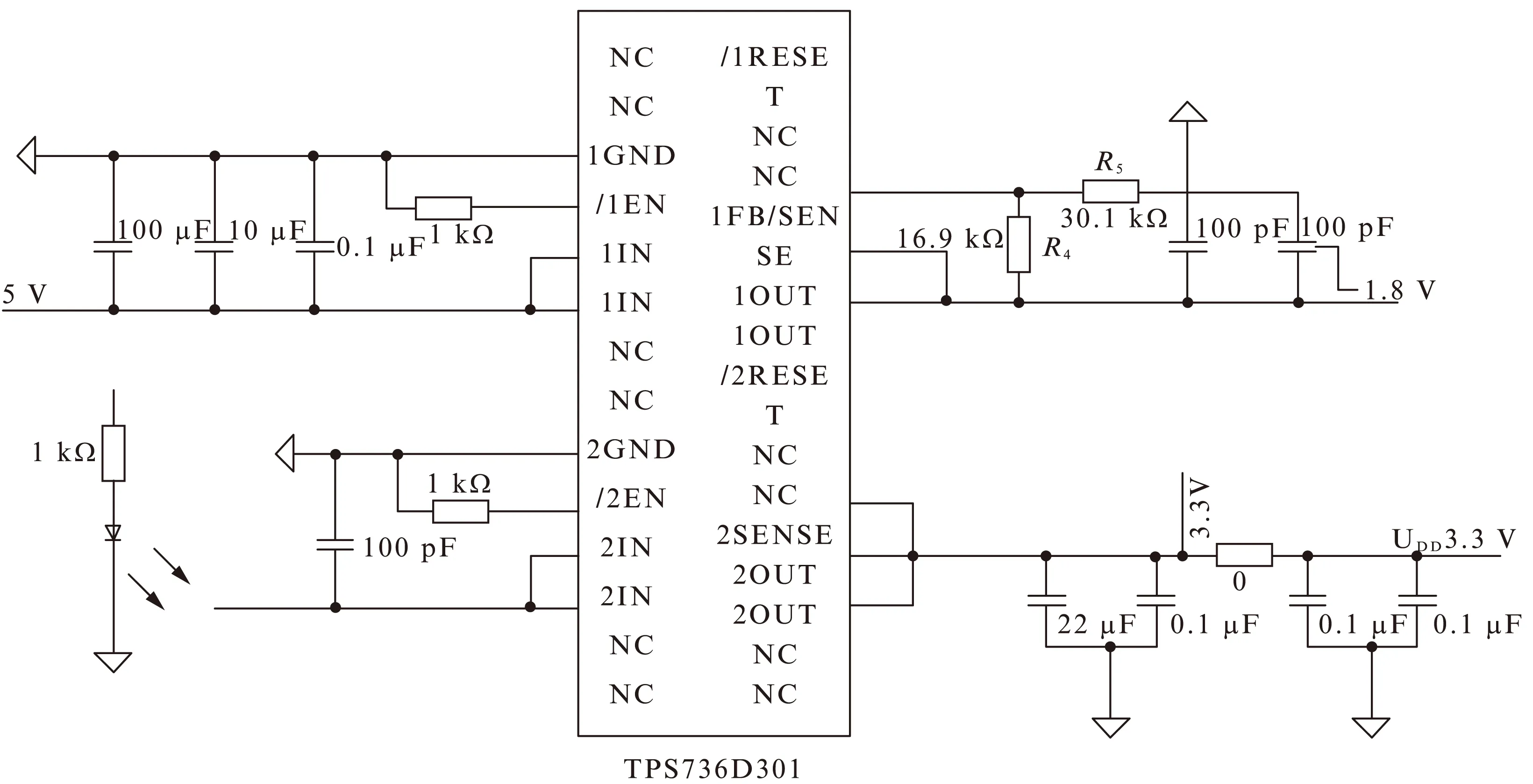
图2 主控电路电源设计
(2) 驱动级电路电源设计。驱动级电源电路如图3所示。该电路电源输入端通过熔断丝和二极管实现了防反接设计,对整个驱动级电路系统进行了反接保护。
2.2 主控电路设计
主控电路以DSP2812作为核心控制芯片。其集成的PWM输出模块可减少外围电路的使用,提高了系统的可靠性和系统的控制精度[6]。

图3 功率级电路电源设计
为了实现较好的可扩展性,主控电路除了DSP2812正常工作必要的电源、晶振、JATG口、复位电路外,将芯片的通用I/O口均引出,实际应用中用杜邦线将主控电路对应的引脚与功率级电路对应的接口连接,实现驱动控制信号的输出与反馈信号的输入。图4是主控电路与单个DRV8846连接的示意图。

图4 主控电路与功率级电路示意图
2.3 驱动级电路设计
驱动级电路包括4个模块,可以实现4个电机的运动控制。DRV8846作为步进电机驱动电路集成芯片,相比分立元件具有设计简单,电路调试容易,电路性能好、稳定性高等优点,对DRV8846不同功能模块引脚配置实现不同的电路功能。具体的方案设计如图5所示。
(1) 细分方案设计。细分驱动是一种电流波形控制技术,将传统的矩形电流波形改为阶梯型近似正弦波形,在正弦波零值和最大值之间分为若干个等幅值、等宽度的阶梯,电流分成多少个阶梯,转子就以多少步完成一个原有的步距角。
对于两相步进电机,若在AB两相绕组中通入幅值按正弦规律变化、相位相差的正弦波电流时,就可以得到幅值恒定、角度均匀的合成电流矢量[7]。如式(2)所示:
(2)
DRV8846的M0/M1是三态输出引脚,通过对M0/M1引脚状态的不同配置设置不同细分,可以实现全步——32细分不同设置。在光纤自动定轴应用中,采用细分控制技术可以提高步进电机的控制精度,降低电机的低频振荡,使电机运行更加平滑。

图5 功率级电路设计
(2) 电流衰减方案设计。DEC0/DEC1/ADEC三个引脚配置绕组电流的衰减模式,DRV8846最新的自动电流衰减技术简化了衰减模式的选择与配置,随着STEP、电流规格、供电电压、BEMF和负载等因素的变化相应地改变电流衰减模式,能够快速响应电流、步数(STEP)变化的同时而不引起较大的纹波,故本设计将ADEC拉高,选择电流自动衰减模式。
(3) 输出电流配置电路设计。与输出电流配置相关的引脚主要有AOUT1/AOUT2、BOUT1/BOUT2、AISEN/BISEN。其中AOUT1/AOUT2,BOUT1/BOUT2引脚是两相电机的绕组电流输出,其大小由式(3)可得
(3)
式中:IFS——满量程电流;
UREF——由UINT分压得到(UINT为+3.3V);
RISENSE——电阻值,0.5Ω;
ITORQUE——输出电流的规格大小,由I0/I1配置,本文中设置I0/I1均为0,即选用100%。
故根据式(3)可知,AOUT1/AOUT2、BOUT1/BOUT2引脚输出电流的大小由UREF值决定。由图5可知,可以通过微调电位器调节UREF值的大小,从而改变电流输出。
3 软件设计
步进电机起动、停止时的加、减速特性直接影响数控系统的平稳性和精确性,因此,实现过渡过程最短的加减速运动是实现高精度、高效率的关键[8]。图6为某型号的步进电机步进速率/扭矩曲线图,是一般步进电机都有的特性曲线图。随着控制脉冲频率增加,步进电机的转速逐步升高、而带负载能力下降。图6中Fs为电机的起动频率,由于F>Fs时起动电机,可能导致电机停转,从而失去同步性。正常起动电机,需设置F>Fs,起动后再慢慢提高速度。因此,在前面多轴硬件驱动控制基础上,增加电机加减速算法的控制,提高控制精度,使电机运行更加平稳。
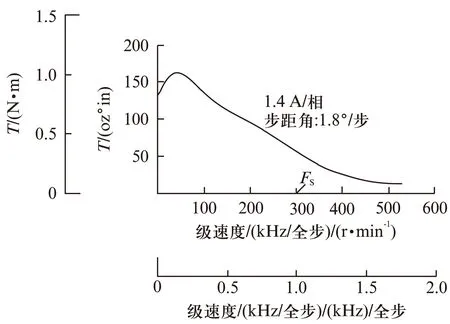
图6 某型号电机矩频特性曲线
通常采用的加减速算法主要有梯形曲线、指数曲线和S曲线[9]。其中,梯形曲线算法简单、占用机时少、响应快、效率高[10],故本文采用梯形加减速方案,电机加减速曲线如图7所示。以步进总数为基准将电机运行分成三个部分: 前25%的步数用于步进电机的加速,中间50%用于使电机恒速运行,最后的25%用于电机的减速。具体的加减速算法流程如图8所示。由图8可知,只需要给定步进电机的运行步数,然后在电机运行过程中实时计算已运转步数占总步数百分比,并根据计算结果相应地改变电机控制方式。

图7 电机加减速曲线
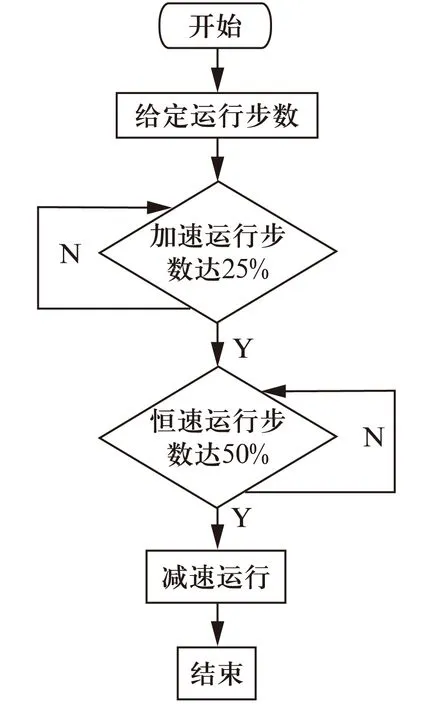
图8 软件算法流程图
4 试验与分析
以工程中光纤自动定轴装置为试验对象,旨在将直径为80μm的熊猫光纤自动放置在铌酸锂块凹槽中并实现定轴。光纤自动定轴装置主要由四维电动位移台、观测CCD、光纤旋转器等组成,通过观测CCD实时采集光纤端面和侧面图像,确定光纤位置与姿态,并通过四维位移台实时调整。电动位移台采用北京卓立公司的超高精度电动位移台SKY- 40搭建而成,电机为海顿21H4U-2.5-118型号两相直线步进电机,螺距约为0.3164mm,步距角为1.8°,位移台在不同细分配置下的步进分辨率可由式(3)计算得出:
(3)
式中,Ds为每个STEP位移距离,当电流细分达到16时,位移台步进分辨率可低至0.10,满足光纤放置要求。
本文设计的驱动级电路可输出4路0~1A的可调电流(电机工作电流0.49A),满足电机驱动要求。根据系统速度要求,主控制电路板输出的脉冲控制信号(STEP)频率由式(4)可得
(4)
式中:v——电机运转目标速度,单位为r/min;
nm——细分数;
θstep——步进电机步距角。
图9(a)~图9(d)分别为电机绕组线全步、4细分、16细分、32细分时电流波形图。由图9可知,全步和4细分运行时,电流波形相比理想的正弦波都有不同程度的畸变,尤其是在全步(没有细分)的情况下,电流波形有比较严重的失真,电机实际运行时也出现不同程度的堵转与卡顿现象,并伴有较大的噪声;当细分数达到16细分后,电流波形基本相同,近似为正弦波,电机实际运行时噪声低,更加平滑流畅,电机的运动性能得到了很大提升。
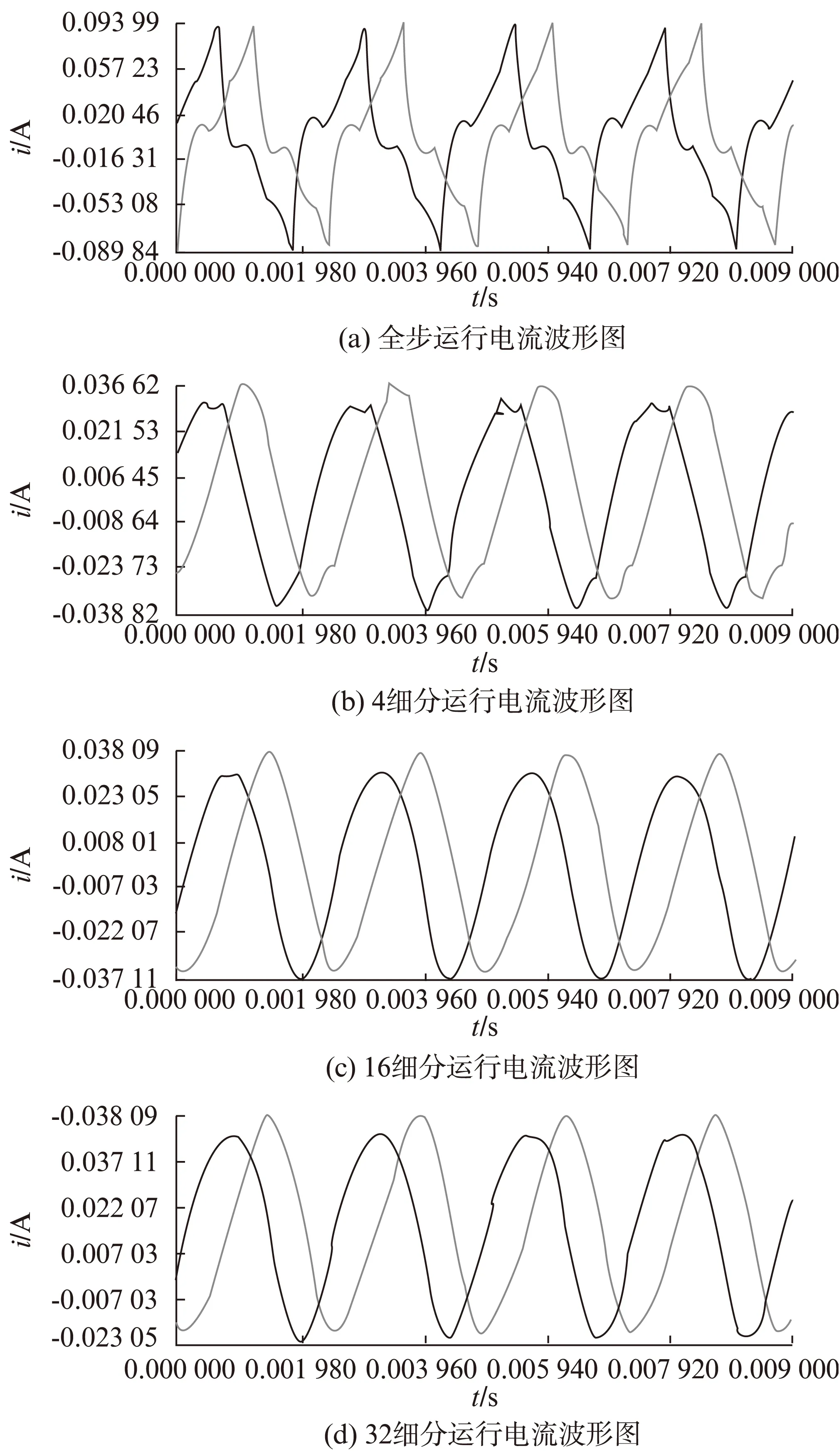
图9 电流波形图
5 结 语
本文利用DSP2812和DRV8846组合实现多轴步进电机驱动系统设计。在此基础上,对步进电机加减速算法做了一定的研究,并在保偏光纤自动定轴装置中实践,有效抑制了电机运动过程中的噪声和机械振动,改善了低频振动、高频失步等现象,提高了步进电机的控制精度和步进分辨率,满足保偏光纤自动定轴装置要求。
[1] HIROYUKI T, MIKIO Y, TAKESNI Y, et al. Manufacturing method for polarization maintaining optical fiber couplers: EP, US5024501[P].1991.[2] 黄金磊,赵毅飞,李岩. 基于可编程序控制器的步进电动机驱动方法研究与设计[J]. 微特电机,2015,43(12): 81-84.
[3] CHONG Y, XU C, FENG H, et al. One kind of control method based on PLC of stepper motor[C]∥ 2nd International Conference on Civil, Materials and Environmental Sciences, Atlantis Press, 2015:418- 421.
[4] BA X, ZUO Y B, WANG J F, et al. Stepper motor driver based on FPGA with USB interface[C]∥Fifth International Symposium on Test Automation & Instrumentation, 2014: 611-616.
[5] SHI R R, LUO J. Stepper motor drive control based on MCU[C]∥Intelligent Information Technology Application Association, Proceedings of the 2011 2nd Asia-Pacific Conference on Wearable Computing Systems and 2011 International Conference on Intelligent Control and Information Technology(ICICIT 2011 V5), 2011: 1-3.
[6] 熊永康,李跃忠,全丽希.基于TMS320F28335的微位移步进电机控制系统设计[J].电子技术,2014,41(4): 61-63.
[7] 徐锟,党幼云,张峰. 四自由度机械手多细分步进电机驱动器的设计[J]. 西安工程大学学报,2015,29(6): 714-719.
[8] JEON J W, KIM Y K. FPGA based acceleration and deceleration circuit for industrial robots and CNC machine tols[J]. Mechatrionics,2002,2(4): 635-642.
[9] 侯艳艳,王洪君,王丽丽. 三轴联动数控雕刻机加减速控制算法的研究[J]. 组合机床与自动化加工技术,2006(7): 49-51.
[10] 张占立,康春花,郭士军,等.基于单片机的步进电机控制系统[J].电机与控制应用,2011,38(3): 40- 41.
Multi-Axis Precision Subdivision Driving System Design for Polarization Maintaining Fiber Automatic Fixed Axis*
LIHuipeng,ZHENGXiao,ZHUWeiwei,TANMengxi
(Science and Optical Engineering College, Beijing University of Aeronautics and Astronautics, Beijing 100039, China)
The automatic fixed axis technology of the PMF involved precise positioning, testing and adjustment of optical fibers’ position and posture, putting forward higher requirements for the precise adjustment of optical fiber position and orientation in real time. Designed and implemented multi-axis stepper motor subdivision driver control circuit used to the automatic fixed axis of PMF. The circuit took TI’s DSP2812 as the control system core architecture, using DRV8846 as a power stage driver chips, designing the scheme of current decay mode and automatic segmentation based on the study of stepper motor control and segmentation drive the principle. It effectively inhibited the noise and mechanical vibration in the movement of the motor, improving low-frequency vibration, high-frequency step-out, and to enhance the sports performance of the stepper motor.
polarization maintaining fiber(PMF); automatic fixed axis; multi-axis stepper motor; subdivision driver
国家重大科学仪器设备开发专项(2013YQ040877)
李慧鹏(1975—),男,博士研究生,研究方向为仪器。
郑 晓(1994—),男,硕士研究生,研究方向为硬件电路与嵌入式系统设计。
TM 301.2
A
1673-6540(2016)10- 0014- 05
2016-03-24
