大型散货堆体积的快速测量
2016-11-10杨德山董丽丽梁倩倩许文海
杨德山,董丽丽,梁倩倩,许文海
(大连海事大学 信息科学技术学院,辽宁 大连 116026)
大型散货堆体积的快速测量
杨德山,董丽丽*,梁倩倩,许文海
(大连海事大学 信息科学技术学院,辽宁 大连 116026)
针对现有散货测量系统对堆场环境适应性差、盘点时间长、效率低、操作复杂等不足,提出了一种散货堆体积快速测量方法。同时,利用二维激光扫描仪、差分GPS和姿态测量系统设计了一种体积测量系统。该系统用激光扫描仪动态测量堆体表面的几何信息,用姿态测量系统实时测量扫描仪的空间姿态数据,用GPS测出扫描仪在测量过程中的三维位置;最后通过数据融合计算形成堆体的三维点云,利用点云获得散货堆体积。文中基于单条堆体轮廓点云特征,提出快速堆体下边缘查找算法来去除扫描过程中地面点云的误差影响;采用投影剖分法完成完整堆体点云计算体积。实验显示,利用本文设计的测试系统可在30 s内完成体积为69 m3的标准堆体测量,平均相对误差为0.42%,重复测量误差为0.41%。在实际散货堆实验中,可在10 min内完成大小约为31 500 m3的散货堆测量,4个不同料堆体积测量的平均重复测量误差为0.74%。结果表明,本方法可在保证测量精度的同时,简单、高效地测量散货堆体积。
激光测量;体积测量;快速测量;大型散货堆;点云边缘;三角剖分
(CollegeofInformationSciencesandTechnology,DalianMaritimeUniversity,Dalian116026,China)*Correspondingauthor,E-mail:dll_lili@163.com
1 引 言
在电厂、港口、储煤基地和粮仓等大型散货集散基地会堆存大量煤炭、矿石、粮食等散货,快速、准确获取当前堆场的储量是国家和企业进行经济规划、战略储备计划、生产安排的关键。
随着传感器和激光技术的发展,光学三维建模系统的应用于越来越多[1-6],基于三维模型可以进行堆场储量的测量[7-10]。熊友辉等[11]提出一种便携式激光测量仪,通过多站人工打点的方式进行盘点,虽然该仪器存在测量周期长、精度差、人为影响大等缺点,但仍是现在堆场测量的常用方法。张德津等[12]提出了一种基于多传感器的固定式激光测量方法,该方法将激光扫描仪安装在外界载体(如取料机等)上对堆场进行测量。盛业华等[13]提出了一种基于三维激光扫描点云的多站拼接方法,该方法围绕被测目标布设多个测量点,将各测量获得的点云进行拼接进而获得完整的被测堆体模型。张小虎等[14]提出了激光投影线辅助下的堆场三维形貌摄影测量方法,将可见光图像和激光扫描点云融合建立被测堆场的三维模型。王海波等[15]提出了车载式多站盘点系统。总体来说,目前的堆场测量系统仍然依赖外界设备,存在测量周期长、实时性差、过程复杂、人为影响大等缺点。
本文提出了一种散货堆体积快速测量方法,利用二维激光扫描仪、差分全球定位系统(Global Position System,GPS)和姿态测量系统组合设计了一种手提式体积快速测量系统。相对基点测量盘煤仪如便携式盘煤仪、车载定点式盘煤仪,本文方法既不需要围绕煤堆选择测量基点,也不需要在测量基点上对堆体打点测量;相对于固定式盘煤仪和投影辅助盘煤仪,本文方法不依赖于取料机等外界设备,数据处理放于盘煤仪内部,测量完成后可直接生成点云并计算得到结果,不需额外的数据传输。测量人员仅需手提该测量系统围绕被测堆体行走一周即可实时得到被测堆体的体积。实验证明,本系统在保证测量精度的同时,具有适应能力强、快速高效、操作简便和成本低等特点,有良好的应用价值。
2 测量原理与算法
本文提出的散货堆测量方法的测量示意图如图1所示。其测量原理为:当测量人员手提测量系统围绕堆体行走时,激光扫描仪动态测量堆体表面的几何信息;同时姿态测量系统实时测量扫描仪的空间姿态数据,GPS测出扫描仪在测量过程中的三维位置;经过数据融合计算形成堆体的三维点云,并利用点云进行体积计算。
以开始测量时刻GPS天线的相位中心为原点建立全局测量坐标系,以水平正北为Y轴,Z轴沿重力铅垂线向上,X轴垂直于YOZ平面指向正东。测量系统的坐标系主要有激光扫描的局部坐标系(简称L坐标系),姿态局部坐标系(简称I坐标系)和全局测量坐标系(简称M坐标系)。
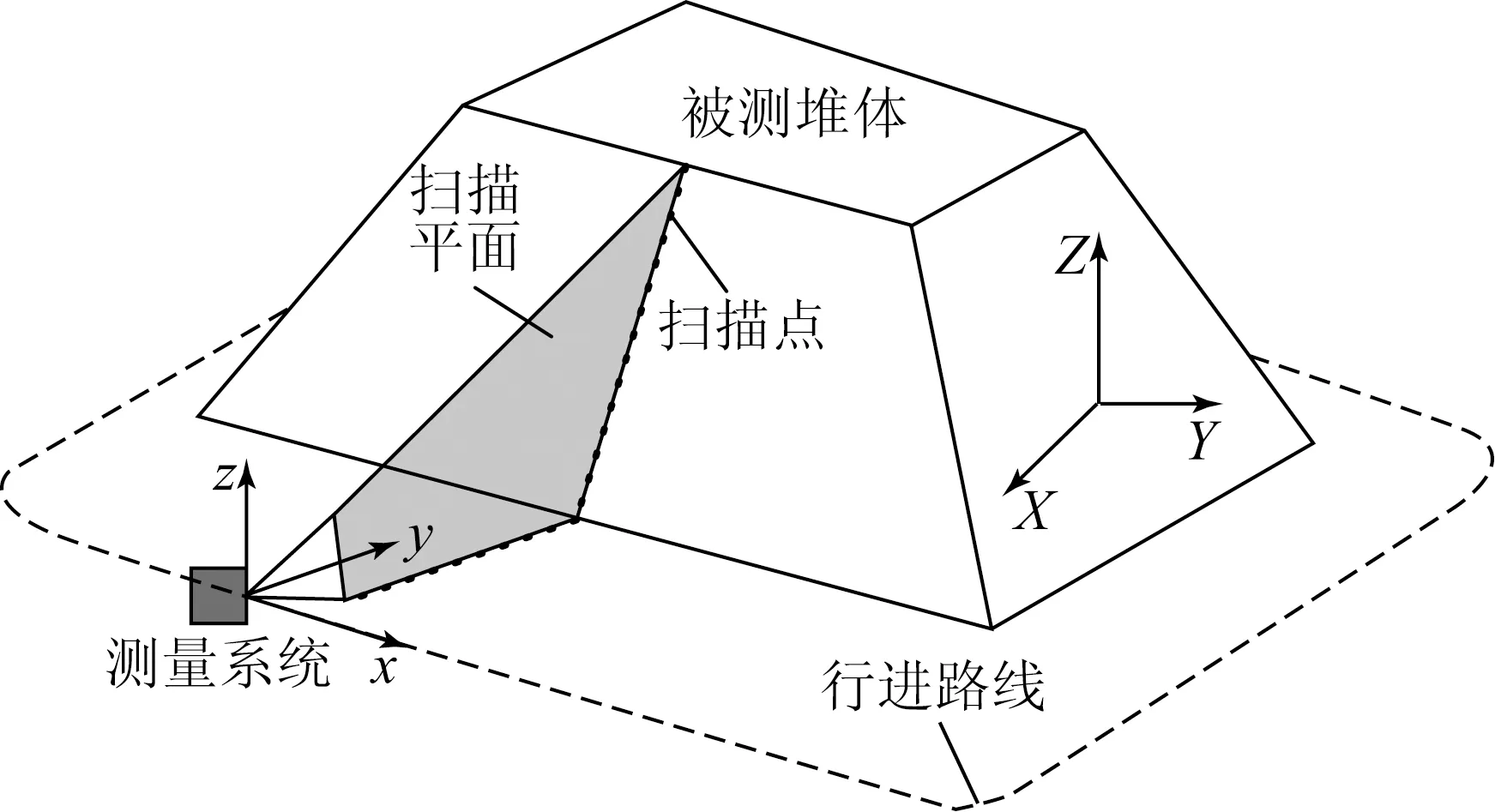
图1 手提测量系统的测量示意图
针对二维激光扫描仪,设任一脚点的测距为S,扫描角为θ,则该脚点在全局测量坐标系中的坐标为:

(1)
先沿Z轴顺时针旋转偏航角α,对应的旋转矩阵为:

(2)
再分别沿X轴和Y轴顺时针旋转横滚角β和俯仰角γ,对应的旋转矩阵分别为:

(3)
(4)
由于坐标系符合右手定则,因此绕y轴的旋转变换矩阵与绕X轴和Z轴的变换矩阵在符号上有所不同。于是可以得到:
RGI=Ry(γ)Rx(β)Rz(α).
(5)
同理,RIL为分别沿Z轴,X轴和Y轴顺时针旋转安装误差角Δα,Δβ,Δγ的旋转矩阵,即:
RIL=Ry(Δγ)Rx(Δβ)Rz(Δα).
(6)
将式(6)和式(5)带入式(1)可将激光扫描仪获取的堆体表面信息转换为空间三维点云数据。
2.2地面点去除处理
在测量过程中,激光扫描仪不可避免扫描到被测堆体附近的地面,给堆体三维建模和体积计算带来额外误差,因此需要将地面点从整体点云中去除。由于在大型散货集散基地的堆体是由堆料机堆砌成垛,所以会与地面形成明显的分界,即激光扫描点云中俗称的堆体下边缘。由于二维激光扫描点为顺序扫描,因此找到堆体下边缘点即可去除地面点。目前,已有学者研究了许多点云边缘提取算法[16],本文针对扫描堆体的轮廓特征,提出一种快速边缘查找算法,算法流程如下:
(1)在局部坐标系y-z平面内,一条激光扫描线得到的堆体轮廓点云如图2所示。计算轮廓点云生成后的第一个点到最后一个点的连线的斜率,并求反正切,得到斜率对应的角度为:

(7)

图2 单条轮廓点云
(2)将该条扫描线对应的轮廓点云在y-z平面内顺时针旋转角度θ,即有:

(8)
(3)比较旋转后点云的z坐标,选择其中z坐标最小的点对应的标号k,此点即为地堆分界点。如图3所示。
Zk=min{Zi},i=1,2,…,n.
(9)
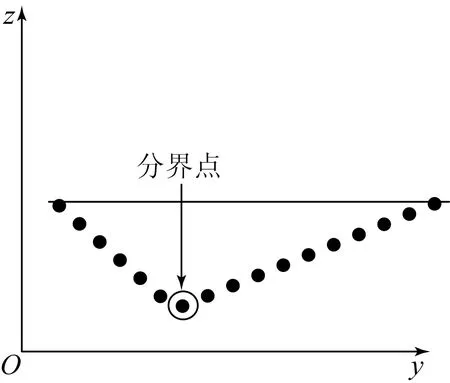
图3 分界点提取
(4)在原始扫描点云中去除标号大于k的地面点云。
由于雨水冲刷等原因,堆体也会存在下边缘不明显的特殊情况,如图4所示。当从扫描轮廓点云中无法直接找到显著分界点时,本文首先根据轮廓点云分别拟合出堆体点和地面点直线;然后寻找两条拟合线的交点m,将该点定义为拟合分界点;再计算轮廓点云中在两条拟合线相交范围内各点(图4中p1~p3点)到拟合分界点m的距离;最后将距离m最近的点(图4中为p1点)取为分界点。通过直线拟合确定分界点依赖于拟合直线交点的准确计算,而由于实际堆体表面和地面的平整度直接影响了堆体拟合直线的特性,最终体积的计算误差会增大。因此通常情况下当堆体分界点明显时,本文采用直接旋转求最小值的方法求取下边缘分界点。

图4 不明显分界点提取方法
2.3投影Delaunay三角剖分体积算法
因为散货堆的堆体形状在空间上没有层叠区域,因此可以利用投影法来计算体积。首先将上述得到的点云投影到xy平面上,对投影后的点云进行Delaunay三角剖分,剖分为互不包含的独立三角形,且每个三角形对应堆体表面的一个三角面片,三角面片和投影三角形构成一个组合体,如图5所示。计算剖分得到的所有三角形对应的组合体的体积并求和,即为整个散货堆的体积V:
Vi=VABC-A′B′C′+VB-B″A″C+VA-BA″C,
(10)
(11)
由此可知,三棱柱的数量越多,体积测量越准确,而激光扫描仪采集的点云数目决定了三棱柱的数量。

图5 三角面片组合体体积的计算模型
2.4误差来源及评价指标
由点云生成公式可知,影响点云生成准确性的误差因素主要有两类:一类是测量设备的测量误差,主要有激光测距S和角度θ的误差,姿态测量误差,GPS定位误差以及航向角测量误差等;另一类是系统安装误差,主要包括不同设备集成安装过程中的偏心量误差和安置角误差。其中,系统安装误差为静态常量,通过系统标定可消除此部分误差的影响;而测量误差为随机误差,不同的测量误差同时存在且交叉影响,是误差分析的难点。因此,需要对系统进行标定研究[17]。
激光点云生成的准确性直接影响体积测量结果的准确性。本文首先通过搭建标准理想堆体模型来验证系统的相对误差E,相对误差可以反映系统测量的准确性。

(12)
式中:xm为测量值,xr为真值。
由于实际散货堆的体积真值难以获得,因此在验证系统的准确性后,以重复测量误差来衡量系统的测量可靠性。测量仪器的重复性是测量仪器随机误差分量的表现,通过测量仪器进行连续多次测量并和参考值进行比较,计算实验标准差来表示被评定测量仪器的重复性。一般用贝塞尔公式计算实验标准差S。以贝塞尔公式得到的标准差除以测量平均值代表系统的重复性误差er。

(13)
(14)

3 标准模型实验
3.1测量系统设计
利用上述系统原理与算法,本文设计研发了手提式体积测量系统,系统采用SICK LMS511激光扫描仪和天宝差分GPS,利用双天线GPS和动态倾角仪测量姿态。双天线GPS由两个伸缩杆连接,避免了天线受到人体遮挡的影响。测量系统的实物图如图6所示,该系统长45 cm,宽20 cm,高20 cm,质量为12.5 kg,对一般被测散货物品的光学特性无特殊要求。

图6 手提测量系统实物照片
本文在系统研制完成后,首先对系统整体进行了安装误差标定,消除了安装误差对测量结果的影响。
3.2标准散货模型测量
根据散货堆的形状特点,这里搭建了标准四棱台散货堆模型,模型底面为8 m×7 m的长方形,堆高3 m,上表面为2 m×1 m的长方形,标准模型的真实体积为69 m3,忽略模型在室外由于人工堆放及热胀冷缩等原因造成的误差。
利用本文研制的测量系统对模拟散货堆进行10次测量,生成的点云模型如图8所示,10次体积测量结果如图9所示。

图7 标准散货模型实物图

图8 标准散货模型点云图

图9 标准堆10次测量结果

图10 10次测量的相对误差
根据图9的测量结果,由式(12)和式(14)计算得到10次体积测量的平均相对误差为0.42%,测量的重复性误差为0.41%。结果表明,本文设计的手提式体积快速测量系统具有良好的测量精度。实验表明,该测量系统可在30 s内得到被测堆体的空间三维点云图和体积,在保证准确度的情况下,有效提高了测量的速度与效率。
3.3散货实物实验
利用自主研发的手提式体积快速测量系统,在秦皇岛、天津和黄骅港神华储煤基地进行实地测量实验,选取4个体积不同的大型煤堆进行典型测量,分别对每个煤堆进行10次测量,以重复测量误差来衡量测量结果的可靠性。测量结果如表1所示,所提取的堆体轮廓点云分界点如图11所示。测量煤堆1得到的点云图如图12所示。

图11 实际堆体轮廓点云及分界点图

图12 煤堆1的点云图
由表1中4个煤堆的10次体积测量结果可以看出,系统的测量重复性误差不会受到堆体体积的影响。计算结果显示,系统的平均重复测量误差为0.74%。其中,体积约为31 500 m3的煤堆1测量一次所需的时间小于10 min,而利用目前堆场使用的打点测量盘煤仪至少需要1 h。实践表明,本文设计的手提式体积快速测量系统具有良好的重复准确性,可在保证测量精度的条件下,快速获得大型煤堆的体积。
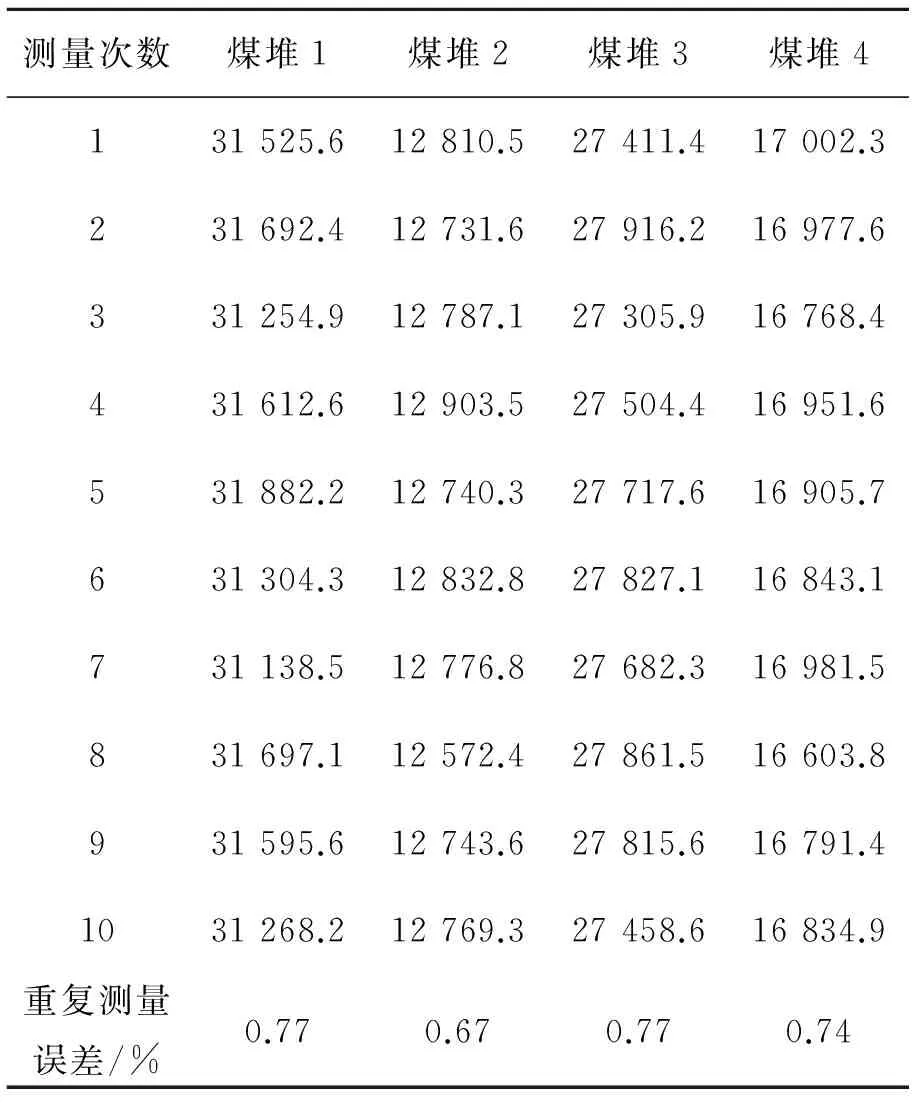
表1 4个煤堆的体积测量结果
4 结 论
本文提出了一种大型散货堆体积快速测量方法,解决了大型散货堆场的实时快速体积测量问题;提出了基于堆体特征轮廓的点云边缘查找算法,从而得到完整的堆体点云模型,并利用投影Delaunay三角剖分和棱柱体积累加算法计算堆体体积。标准模型堆测量实验结果表明,利用本文方法设计的测量系统测量准确,平均相对误差为0.42%,重复测量误差为0.41%。在黄骅港、秦皇岛和天津港等神华储煤基地选取多个煤堆进行实地测量。结果表明,该方法可高效快速地测量大型煤堆的体积,在10 min内完成31 500 m3堆体的测量,体积测量的平均重复测量误差为0.74%。
本文设计的手提式体积快速测量系统已协助神华集团完成黄骅港和天津港储煤基地的年度审计盘点工作,实践表明本系统在保证测量准确度的情况下,大大提高了测量效率,节省了盘点的成本和时间。该系统可以在电厂、大型储煤基地等企业进行推广应用,具有良好的实用前景。
[1]边心田,苏显渝,陈文强.基于反向摄影的三维坐标测量方法[J].中国激光,2010,37(7):1832-1836.
BIAN X T,SU X Y, CHEN W Q.A novel tree-dimensional coordinates measurement method based on inverse photogrammetry[J].ChineseJ.Laser,2010,37(7):1832-1836.(in Chinese)
[2]戴彬,钟若飞,胡竞. 基于车载激光扫描数据的城市地物三维重建研究[J].首都师范大学学报:自然科学版,2011,32(3):89-96.
DAI B,ZHONG R F,HU J.Research on 3D reconstruction of urban features from data based on vehicle-borne laser scanning[J].JournalofCapitalNormalUniversity:NaturalScienceEdition,2011,32(3):89-96.(in Chinese)
[3]林义闽,吕乃光,娄小平,等.用于弱纹理场景三维重建的机器人视觉系统[J].光学 精密工程,2015,23(2):540-549.
LIN Y M,LÜ N G,LOU X P,etal.. Robot vision system for 3D reconstruction in low texture environment[J].Opt.PrecisionEng.,2015,23(2):540-549.(in Chinese)
[4]AHN J K, LEE K Y, SIM J Y,etal..Large-scale 3D point cloud compression using adaptive radial distance prediction in hybrid coordinate domains[J].IEEEJournalofSelectedTopicsinSignalProcessing,2015,9(3):422-434.
[5]CHEN J,WU X J,WANG M Y,etal..3D shape modeling using a self-developed hand-held 3D laser scanner and an efficient HT-ICP point cloud registration algorithm [J].Optics&LaserTechnology,2013,45: 414-423.
[6]时光,张福民,曲兴华.经济型大尺寸激光自动坐标测量系统[J].光学 精密工程,2013,21(8):1957-1965.
SHI G,ZHANG F M,QU X H.Economical type large-scale laser automatic coordinate measuring system[J].Opt.PrecisionEng.,2013,21(8) :1957-1965.(in Chinese)
[7]周森,郭永彩,高潮,等.基于三维激光扫描的移动大尺寸圆柱体工件长度快速检测系统[J].光学 精密工程,2014,22(6):1524-1530.ZHOU S,GUO Y C,GAO CH,etal..Rapid length measuring system for mobile and large scale cylinder workpieces based on 3D laser scanning[J].Opt.PrecisionEng., 2014,22(6):1524-1530.(in Chinese)
[8]邵晴,徐涛,吉野辰萌,等.基于三维激光扫描技术的粮食储量监测系统的设计与试验[J]. 农业工程学报,2015,31(20):262-267.
SHAO Q,XU T, YOSHINO T,etal..Design and experiment for grain storage monitoring system based on 3-D laser scanning technology[J].TransactionsoftheChineseSocietyofAgriculturalEngineering,2015,31(20): 262-267.(in Chinese)
[9]HYYPPA J,KELLE O,LEHIKOINEN M,etal.. A segmentation-based method to retrieve stem volume estimates from 3-D tree height models produced by laser scanners[J].IEEETransactionsonGeoscienceandRemoteSensing,2011,39(5): 969-975.
[10]陈展鹏,雷延武,晏清洪,等.汶川震区滑坡堆积体体积三维激光扫描仪测量与计算方法[J].农业工程学报,2013,29(8):135-144.CHEN ZH P,LEI Y W,YAN Q H,etal..Measuring and calculation methods for landslide volume with 3-D laser scanner in Wenchuan earthquake area[J].TransactionsoftheChineseSocietyofAgriculturalEngineering, 2013,29(8):135-144.(in Chinese)
[11]熊友辉,李培生,邹显宏,等.便携式激光盘煤系统原理及应用[J].中国电力,2003,36(6):48-51.XIONG Y H,LI P SH,ZOU X H,etal..Study for the method of automatic disk coal in the open coal yard [J].ElectricPower,2003,36(6):48-51.(in Chinese)
[12]张德津,李必军,何莉.基于多传感器集成的堆场激光测量技术应用[J].中国激光,2012(2):159-164.
ZHANG D J,LI B J,HE L.Application on laser measurement for large storage yard based on multi-sensor integration[J].ChineseJ.Lasers,2012(2):159-164.(in Chinese)
[13]盛业华,张卡,张凯,等.地面三维激光扫描点云的多站数据无缝拼接[J].中国矿业大学学报,2010,39(2):233-237.
SHENG Y H,ZHANG K,ZHANG K,etal..Seamless multi-station merging of terrestrial laser scanned 3D point clouds[J].JournalofChinaUniversityofMining&Technology, 2010,39(2):233-237.(in Chinese)
[14]张小虎,欧建良,苑云,等.投影轮廓线辅助下的堆场三维形貌摄影测量研究[J].光学学报,2011(6):99-106.
ZHANG X H,OU J L,YUAN Y,etal..Stack-yard 3D measurement based on photogrammetry and projected contour aiding[J].ActaOpticaSinica,2011(6):99-106.(in Chinese)
[15]王海波,张德津,何莉.大型露天料场激光测量方法研究[J].中国激光,2013(5):189-196.WANG H B,ZHANG D J,HE L.Research on large open stockyard laser measurement methods[J].ChineseJ.Lasers, 2013(5):189-196.(in Chinese)
[16]谭贲,钟若飞,李芹.车载激光扫描数据的地物分类方法[J].遥感学报,2012(1):50-66.
TAN B,ZHONG R F,LI Q.Objects classification with vehicle-borne laser scanning data[J].JournalofRemoteSensing,2012(1):50-66.(in Chinese)
[17]章大勇,吴文启,吴美平.机载激光雷达系统标定方法[J].光学 精密工程,2009,17(11):2806-2813.
ZHANG D Y,WU W Q,WU M P.Calibration technology of airborne lidar[J].Opt.PrecisionEng.,2009,17(11):2806-2813.(in Chinese)
董丽丽(1980-),女,博士,副教授,2002年、2004年、2008年于哈尔滨工业大学分别获得学士、硕士、博士学位,主要研究方向为光电信息与光电检测等。E-mail:dll_lili@163.com
导师简介:

许文海(1956-),男,教授,博士生导师,1982年、1984年、1991年于哈尔滨工业大学分别获得学士、硕士、博士学位,1993年于东京工业大学获得博士学位,主要从事水下探测、光电检测与光电信息等方面的研究。E-mail:whxu@dlmu.edu.cn
(版权所有未经许可不得转载)
Rapid volume measurement for large bulk cargo
YANG De-shan, DONG Li-li*, LIANG Qian-qian, XU Wen-hai
A rapid volume measurement method for a bulk cargo was proposed to overcome the shortcomings of traditional bulk measuring systems in poor adaptability for yard environments, longer complete time, lower efficiency and complex operation. Then a volume measuring system consisting of a 2D laser scanner, a difference GPS and an attitude measuring system was designed. For this system, the laser scanner was used to measure dynamically the surface geometry information of a bulk, the attitude measuring system was taken to measure the space attitude data of the scanner in real time and the GPS was utilized to obtain the 3D position of the scanner in measuring processing. Finally, the data fusion was used to calculate 3D point cloud of the bulk cargo and to obtain the volume of the bulk cargo. On the basis of the feature of single scanned outline, an algorithm to extract the down edge of the bulk cargo effectively was proposed to remove the measurement error from ground point cloud and a projection triangulation volume algorithm was used to calculate the volume of bulk’s point cloud. Experiment shows that the system could complete the measurement of bulk cargo with a size of 69 m3in 30 s, the average relative error is 0.42% and the repeated measurement error is 0.41%. In a reality bulk measurement, the measurement on about 31 500 m3takes less than 10 min, and the average repeated measurement error for 4 coal bulks is 0.74%. It shows that the system could measure the volume of bulk cargo quickly and easily on maintaining accurate measurement.
laser measurement; volume measurement; rapid measurement; large bulk; point cloud edge; triangulation
2016-04-05;
2016-06-03.
国家科技支撑计划资助项目(No.2014BAB12B03);国家自然科学基金资助项目(No.61501077);中央高校基本科研业务费专项资金资助项目(No.3132016351)
1004-924X(2016)09-2126-08
TP23;TH821
A
10.3788/OPE.20162409.2126

杨德山(1987-),男,河北石家庄人,2011年于江西理工大学获得学士学位,2013年于大连海事大学获得硕士学位,主要从事光电检测、激光测量的研究。E-mail:67186486@qq.com
