五杆式自动给汤机运动分析与优化仿真*
2016-11-07朱伟强
朱 伟 强
(天津现代职业技术学院 校企合作办公室, 天津 津南区 300350)
五杆式自动给汤机运动分析与优化仿真*
朱 伟 强
(天津现代职业技术学院校企合作办公室, 天津津南区300350)
给汤机代替压铸生产线上的人工取汤实现自动给料,针对常用的五杆式自动给汤机,采用解析法对该机械手进行了运动学分析,综合五杆式自动给汤机送汤行程、速度要求,对其进行运动分析优化。在此基础上,利用MATLAB对优化结果进行了仿真分析,仿真结果表明:送汤水平距离增加了200 mm,垂直距离为350 mm,优化杆长扩大了给汤行程,提高了运动平稳性。
五杆式自动给汤机; 运动分析优化; MATLAB
压铸行业的特点是劳动强度大、环境温度高、粉尘量大。负责压铸机运作的工人,操作危险。打造模具的同时,汤料温度高,压铸机一旦出现问题,给人工操作带来危险。本文研究一款五杆式自动给汤机,提升了压铸作业效率及安全性。该设备与压铸机,自动取出机一起构成全自动成套压铸设备。综合五杆式自动给汤机送汤行程、速度要求,对其进行运动分析优化及仿真,仿真结果表明,优化后的五杆参数能扩大了其工作范围,速度更平稳。
一、五杆式自动给汤机运动分析
通过对五杆式自动给汤机建立运动学模型,获得主要运动参数,检验设计是否满足性能要求,为优化设计奠定基础。对于连杆式给汤机的运动参数求取一般采用分析普通机构的研究方法——图解法、解析法等。解析法计算机构的运动轨迹,计算式复杂,在求解的过程中要逐步、按顺序求解,有时甚至出现不能求解的情况,不过随着计算机的普及,这一方法已经得到了广泛的应用。本文采用解析法求取五杆式自动给汤机的运动参数[1]350-353 [2]940-943。
(一)计算机构的自由度
给汤机的机构简图如图1所示。该机构是平面机构,平面机构的自由度公式为:F=3n-(2P1+Ph) ,其中n为活动构件数(机架不是活动构件),P1为低副个数,Ph为高副个数,则它们将提供(2P1+Ph)个约束,故机构的自由度为:F=3n-(2P1+Ph)=3×5-2×7=1。
该机构的自由度为1,为使机构具有确定的运动,机构的原动件数为1。因此该机构只有一个原动件,即杆AB。
(二)运动分析
用解析法对五杆式自动给汤机进行运动分析。首先建立末杆位置方程,进而求得速度等重要运动参数。本文采用矩阵法建立末端方程,矩阵法是比较容易掌握且便于应用和计算机计算求解的方法。利用Matlab软件获得五杆式自动给汤机操作端的位置曲线,与设计参数对比,优化参数,为建立实验样机提供可靠数据。图1中设AB=L1,BC=L21,BF=L22,CD=L3,DE=L4,EF=L51,FG=L52,AD=L6,BD=L7,杆1~5与x轴的夹角(逆时针)分别为 ;α1,α2,α3,α4,α5;点D坐标(Xd,Yd)。
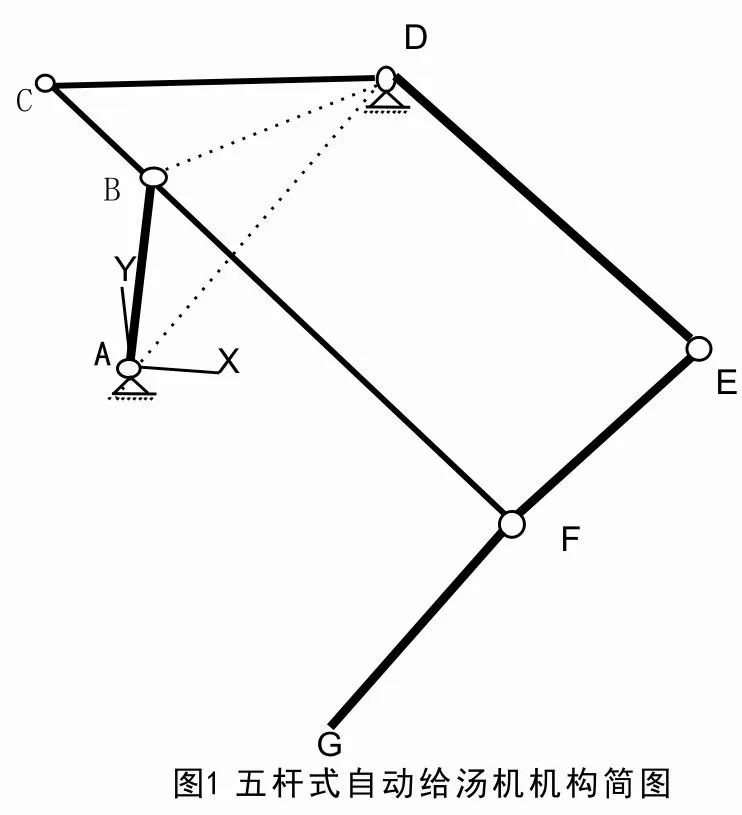
如图1所示,先建立一个直角坐标系,并标出各杆参数及其方位角。其中有四个未知量α2、α3、α4、α5,其他参量可以用已知量及这四个未知量表示出来。为此需利用两个封闭图形ABCDA及BDEFB。由此可得:L1+L21+L3+L6=0 ;L7+L4+L51+L22=0。
由此可得连杆投影方程为:
L1sinα1+L21sinα2+L3sinα3+L6sinα6=0 ,L1cosα1+L21cosα2+L3cosα3+L6cosα6=0 ;
L7sinα7+L4sinα4+L51sinα5+L22sinα2=0 ,L7cosα7+L4cosα4+L51cosα5+L22cosα2=0 。
另外,由图1可知:

利用以上方程联立求解,可得:
Xg=F(α1)=L1cosα1-L22cosα2+L52cosα5,Yg=G(α1)=L1sinα1-L22sinα2+L52sinα5
其中α2、α5都可以用已知量α1表示,即以α1为自变量的两个函数,具体求解过程可借助于Matlab软件求解。然后对以上两式分别求导,可以得到机构末端G点在X和Y方向上的速度:

二、五杆式自动给汤机运动仿真
本文研究的五杆式自动给汤机已知参数:L1=236 mm,L21=118 mm,L22=460 mm,L3=218 mm,L4=584 mm,L51=232 mm,L52=850 mm,适用200 T压铸机,最大给汤量2.5 kg,汤勺规格3.5 kg。采用随机遍历法计算该机构的末端轨迹位置,实质是在各连杆运动范围内随机遍历,利用运动学方程得到五杆式自动给汤机操作端的位置坐标值,运用Matlab语言编程,使求取结果可视化,为其结构的优化设计提供参考依据。
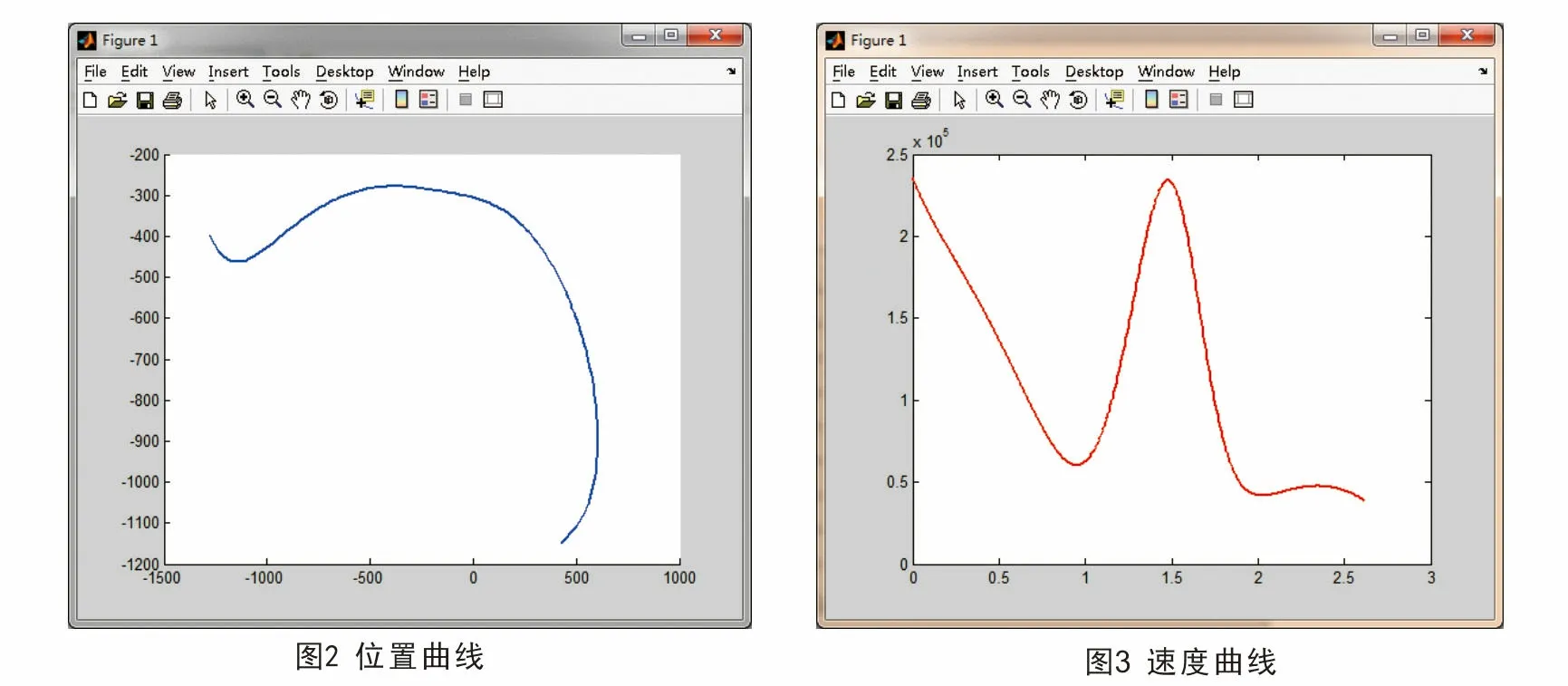
经过上述编程运算得到执行杆件端点G的位置变化曲线如图2所示,速度变化曲线如图3。由图可知,取汤过程中速度平稳,无突变,送汤水平距离≥1 100 mm,垂直距离在200 mm左右,与设计初设定的垂直距离300 mm左右有差距,需进一步优化,以改善五杆式自动给汤机的运动性能[3]55-57。
三、五杆式自动给汤机杆长的优化
自动给汤机在生产中的应用已经比较普遍,但是仍然存在一些问题。综合而言,难点在优化方面,即根据设计要求对其结构参数进行优化,完成相关的分析和计算,绘制相关曲线[4]983-988 [5]1087-1098。
本机构为五杆机构,要求运动平缓,能够准确完成取汤行程,对其位移、速度添加约束,满足设计要求。通过以各杆长为设计变量,对机构进行运动分析,构造目标函数,从而建立数学模型。然后利用MATLAB软件,绘出其位移、速度的曲线,通过改变杆长,改变曲线,使其平滑,从而保证机构运行的稳定实现对其位移进行优化。目标函数:Xg≥1 100 mm;Yg≥11 300 mm。
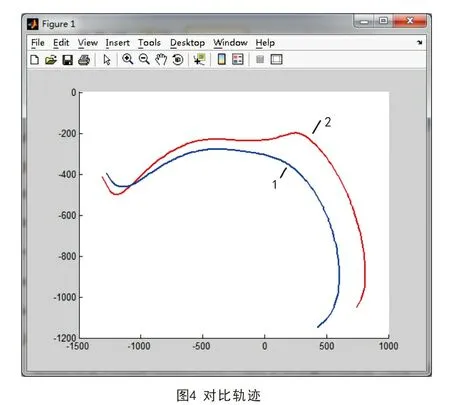
运行程序,得到一组比较理想的解:Xd=55,Yd=335,L1=240,L21=118,L22=468,L3=206,L4=588,L51=228,L52=800。代入位置编程,得到对比轨迹如图4所示。
图4中曲线2为优化后的送汤轨迹,观察上图可知,经优化后,送汤水平距离增加了200 mm,竖直距离为350 mm,优化后末端的轨迹更加符合要求,不仅扩大了送汤行程,而且提高了运动的平稳性。
四、结 语
针对压铸过程中人工操作危险性,本文设计一款五连杆自动给汤机,该机器能代替人力完成压铸给汤作业,通过运动分析优化及仿真,能使生产程序化、机械化。从仿真结果可知,优化后有效提高作业效率,扩大了其工作范围,速度更平稳为机器人完成作业任务打下了基础。
[1] 许勇.常用平面五杆机构计算机辅助运动分析数学模型的研究[J].南京航空航天大学学报,2002(4).
[2] 于红英,唐德威,王建宇.平面五杆机构运动学和动力学特性分析[J].哈尔滨工业大学学报,2007(6).
[3] 梁磊,韩玉强.基于Matlab平面多杆机构的运动分析[J].机械传动,2012(6).
[4] CUI G Q, LI C S, ZHANG M L.Kinematic Analysis of Mobile Manipulator for Measurement and Maintenance in Dangerous Environment[J]. Journal of Wuhan University of Technology,2006(z2).
[5] RUGGIU M.Kinematics analysis of the CUR translational manipulator[J]. Mechanism and Machine Theory,2008(9).
Kinematics and Simulation of Five-bar Automatic Soup Robot
ZHU Wei-qiang
(Office of University-enterprise Cooperation, Tianjin Modern Vocational Technology College, Jinnan District 300350, China)
Artificial taking soup machine replace the die casting production line to realize automatic feeding. In view of the commonly used five bar type automatic machine for soup, using analytical method of the manipulator kinematics analysis and comprehensive five-bar type automatic send soup to soup machine stroke, speed requirements, and a motion analysis was carried out on its optimization. On this basis, the optimization results make use of the MATLAB simulation analysis, which shows that send shui-ping tang distance increased by 200 mm, the vertical distance is 350 mm, optimize the stroke length expanded to soup and improve the running smoothness.
five-bar automatic soup robot; kinematics analysis; Matlab
2016-06-07
朱伟强(1962-),男,天津河西人,讲师,主要从事机构设计与仿真研究。
TH113.2
A
1672-2388(2016)03-0066-03