时变线性切换系统的指数镇定
2016-11-04王兴平
王兴平
时变线性切换系统的指数镇定
王兴平1
研究满足驻留时间条件的时变线性切换系统的指数镇定问题.在一致完全可控条件下,引入带权可控性格拉姆矩阵设计出参数化的反馈控制器,利用比较原理给出状态转移矩阵的超调估计.针对驻留时间已知和未知两种情况,通过选择设计参数消除切换产生的超调影响,建立了两个指数镇定结论.最后以仿真实例验证本文结论.
时变线性切换系统,驻留时间,超调,状态转移矩阵,指数镇定
引用格式王兴平.时变线性切换系统的指数镇定.自动化学报,2016,42(9):1440-1444
切换系统由一组有限个子系统和一个描述子系统如何切换的切换规则组成.工程中有许多系统,如化工系统、机电系统、多智能体系统等,在不同阶段或不同条件需以不同的系统模型来描述,它们都可归结为切换系统.由于这些工程应用背景的推动,近年来,切换系统的研究在控制理论领域备受关注.
共同二次Lyapunov函数方法是切换系统研究最基本的方法[1-4].这一方法与一般系统的Lyapunov函数方法平行,思路最为简明,得到的结果可以适用于任意切换规则,但这一方法对系统有相当高的要求,文献[5]利用Lie代数理论给出共同二次Lyapunov函数存在的条件.对一般切换系统,共同二次Lyapunov函数并不总是存在[6].在文献[7]中,作者针对切换系统的特点引入多Lyapunov函数方法,这一方法扩展了Lyapunov函数方法应用的范围,是切换系统研究的重要方法[8-10].文献[11]将LaSalle不变原理推广到一类线性切换系统,对多Lyapunov函数方法作出进一步的补充完善.还有一些文献不使用Lyapunov函数方法研究切换系统[12-14],其中文献[12]的方法比较富有启发性.切换系统在系统切换时会出现超调现象,它能使一个由稳定子系统组成的切换系统变得不稳定.文献[12]对切换超调做出估计并给出消除超调的方法,建立了线性切换系统指数镇定的结论.
本文在驻留时间假设下研究时变线性切换系统的指数镇定问题.在现有文献中,关于这一问题的结论尚不多见.在时变系统中应用Lyapunov函数方法往往会牵涉复杂的数学处理,本文的研究方法追随文献[12].切换系统不同于一般系统的一个特点是系统在切换时会发生超调,这会使由稳定子系统组成的切换系统变得不稳定.所以,实现切换系统的镇定除实现子系统的镇定外,还需消除切换超调的不利影响.本文引入带权格拉姆可控性矩阵,对满足一致完全可控性条件的时变线性系统设计出含设计参数的状态反馈镇定控制器,然后利用微分方程的比较原理给出系统状态转移矩阵在切换时的超调估计.在驻留时间已知和未知两种情况下,通过选择适当的设计参数消除超调的不利影响,给出两个时变线性切换系统的指数镇定结论.这两个结论可看作文献[12]中的结果在时变情景下的推广.本文结论证明使用基于状态转移矩阵的矩阵分析技术比基于Lyapunov函数的分析方法更简洁,同时这一方法建立在对系统状态的直接分析上,相同的条件下可以得到更直接的结果.
1 基本概念和问题叙述
考虑时变连续线性系统


的解为系统(1)的状态转移矩阵,记为Φ(t,s).系统(1)的可控性格拉姆矩阵(简称格拉姆矩阵)定义为

称时变线性系统(1)是完全可控的(Completely controllable),如在任意时刻t0,任给初值,都存在定义在某一区间[t0,tf]上的控制输入,将系统状态在tf时刻驱动至0[15].系统(1)是完全可控的一个充要条件是:对任给t0≥0,都存在tf>t0使得G(t0,tf)>0是正定的[15].进一步如存在ε2>ε1>0,δ>0使对所有t≥0都成立

就称系统(1)关于完全可控性是一致的(Uniform with respect to complete controllability)[16].
考虑包含N个n维时变线性系统的切换系统

其中切换函数σ(t):[0,∞)→{1,2,···,N}是一个右连续的分段常值函数,对k=1,···,N,所有矩阵Ak(t),Bk(t)的元素都是分段连续的.切换函数σ(t)的切换时刻0=t0<t1<···定义为

记τk=tk+1-tk.在本文我们对切换函数σ(t)提出驻留时间假设.
假设1.切换函数σ(t)的驻留时间τ=infkτk>0.
本文研究时变线性切换系统(5)的指数镇定问题.在切换函数σ(t)满足假设1的条件下,分别就τ已知和τ未知两种情况设计具有时变增益阵的状态反馈控制器

指数镇定时变线性切换系统(5).
2 主要结论
2.1基本引理
仿照文献[16],引入带权格拉姆矩阵

如存在δ>0,使得对所有t≥0系统(1)的格拉姆矩阵G(t,t+δ)>0,则对任意t≥0,

取反馈增益阵


以Φ(α,δ,t,s)表示系统(9)的状态转移矩阵,下面引理给出一个Φ(α,δ,t,s)的范数估计.
引理1.如果存在ε2>ε1>0,δ>0使得系统(1)的格拉姆矩阵G(t,s)对所有t≥0满足式(4),则对任意α>0和任意t≥s≥0都有

从引理1的结论可以推出,当α>0时,控制器(8)可以指数镇定系统(1).另外,当t→s时,状态转移矩阵会出现瞬态超调[12].引理1对这一超调也给出估计,这一超调具有上界.超调现象对切换系统的稳定控制有着不利的影响,它能使由稳定子系统组成的切换系统经切换变为不稳定,实现切换系统的稳定必须要消除超调的影响.从引理1可以看出,当t>s时,只要选取充分大的α,自t时刻之后超调对转移矩阵的影响就会被指数衰减项e-2α(t-s)任意抵消.这一事实是后面主要结论证明的基础.引理的证明在附录中给出.
2.2主要定理
以Φi(t,s),Gi(t,s)分别表示切换系统(5)的第i个子系统

的状态转移矩阵和格拉姆矩阵,相应的带权格拉姆矩阵Gi(α,t,s)定义为
定理1.假定时变线性切换系统(5)的切换函数σ(t)满足假设1且τ已知.如果存在δ<τ和ε2>ε1>0使对所有i=1,2,···,N和所有t≥0都有

则当

时,状态反馈控制器

指数镇定时变线性切换系统(5).
证明.记

将反馈控制器(15)作用到切换系统(5)得到

下面证明如α满足条件(14),系统(17)是指数渐近稳定的.
设σ(t)具有切换时刻0=t0<t1<t2<···,系统(17)可以写成分段形式


其中Φi(α,δ,t,s)是系统

的状态转移矩阵.于是,由式(19),得
利用条件(14)可以推出两个不等式,
根据引理1,得到(20)中状态转移矩阵的估计
将式(23)代入式(20),并应用式(21)、(22)化简整理可得

此即闭环系统(17)是指数渐近稳定的.
下面考虑切换函数σ(t)满足假设1但驻留时间τ未知这一情况.由于定理1中的τ和δ需要满足条件δ<τ,在τ未知时,这一条件是无法验证的,所以,定理1的结论在这一情况下是不可用的.下面我们给出新的反馈控制设计方法.这一方法是在每一切换时刻tk给出τ的估计值,根据估计值选择满足的δk及合适的αk,再由选定的αk和δk分别按式(12)、(16)计算Gσ(tk)(αk,t,s)及反馈增益矩阵Kσ(tk)(αk,δk,t).
为保证Kσ(tk)(αk,δk,t)的计算对所有可能的τ>0都有意义,这里提出条件,要求对任意小的δ>0都存在ε1,ε2>0使式(13)成立,也即存在定义在正实数集上的非负连续函数ε2(δ)>ε1(δ)>0,使对所有i=1,2,···,N,t≥0和δ>0都有

定义函数

则h(δ)>1且在(0,1]上是连续单调下降的.
依照上面描述的思路,下面给出在每一切换时刻设计状态反馈控制器的递归步骤.
初始化.在系统初始时刻t0=0,直接取作为τ的估计值,然后定义
按式(12)和式(16)分别计算格拉姆矩阵Gσ(t0)(α0,t,s)和反馈增益矩阵Kσ(0)(α0,δ0,t),定义t0=0时刻状态反馈控制器为

步骤1.在切换时刻t=t1,取作为τ的估计值并定义

按式(12)和式(16)分别计算格拉姆矩阵Gσ(t1)(α1,t,s)和反馈增益矩阵Kσ(t1)(α1,δ1,t),定义t1时刻状态反馈控制器为

步骤k.在切换时刻t=tk,取作为τ的估计值并定义

按式(12)和式(16)分别计算格拉姆矩阵Gσ(tk)(αk,t,s)和反馈增益矩阵Kσ(tk)(αk,δk,t),定义tk时刻状态反馈控制器为

按这样的递归程序,我们在每一切换时刻都设计出状态反馈控制器.下面证明,如条件(25)成立,这样递归设计的状态反馈控制器可以在τ未知时实现切换系统(5)的指数镇定.
定理2.假定时变线性切换系统(5)的切换函数σ(t)满足假设1但τ未知.如果存在定义在正实数集上的非负连续函数ε2(δ)>ε1(δ)>0,使得式(25)对所有i=1,2,···,N,t≥0和δ>0都成立,则按以上递归步骤设计的状态反馈控制器指数镇定时变线性切换系统(5).
证明.在每一切换时刻将如上递归设计的状态反馈控制器作用于切换系统(5),其闭环系统可以写成分段形式

令k=max{i:ti<t}并记系统(29)在初始0时刻的初值为,闭环系统(29)的状态可以表示为

其中Φσ(ti)(αi,δi,t,s),i=0,1,···是系统

的状态转移矩阵.


由定义,δk满足0<δk≤1且是单调下降的,其极限为
进一步,由定义函数h(δ)在区间0<δ≤1连续单调下降,所以h(δk)单调上升收敛到h(δ)>1.再由αk定义,αk单调上升且具有极限
于是,根据极限定义可知,存在正整数k0,当k≥k0时,下面三个不等式同时成立

利用式(31),首先有


因为t≥kτ及2δ≤τ,所以k≤t/τ≤t/(2δ).于是,利用上面两个不等式可以得到
其中C3=2C1-2C2.将此不等式代入式(30)即有

3 仿真实例
下面给出一个仿真实例验证定理2的结论.取
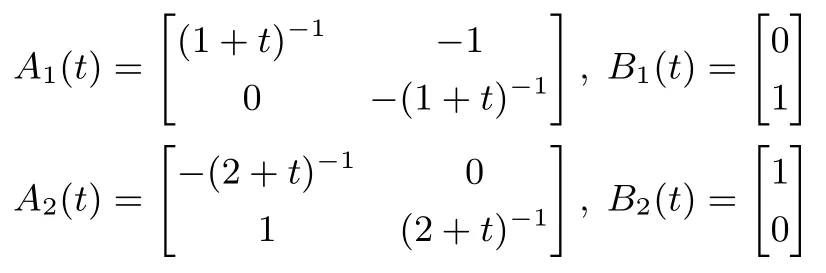
考虑二阶时变线性切换系统

其中切换函数σ(t)如下定义:在[0,1]随机选取一个数a,然后在[a,2a]中重复独立随机选取数列τ0,τ1,···.令

定义
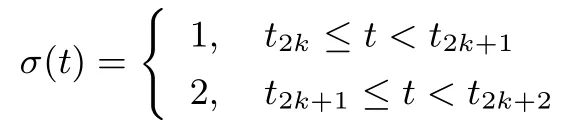
这样,σ(t)的驻留时间τ=infkτk≥a且以概率1大于0,但τ不能提前预知.对任意t≥0,δ>0,可验证两个子系统的格拉姆矩阵都满足一致完全可控性条件(25).
按定理2中给出的步骤设计反馈控制器并应用于切换系统(32).在平面区域[-10,10]×[-10,10]内随机选取系统初值,然后运行仿真.为显示控制策略的有效性,仿真程序独立运行两次,两次仿真中随机产生的驻留时间τ以概率1是不同的,每次运行系统执行四次切换.仿真结果如图1及图2所示.
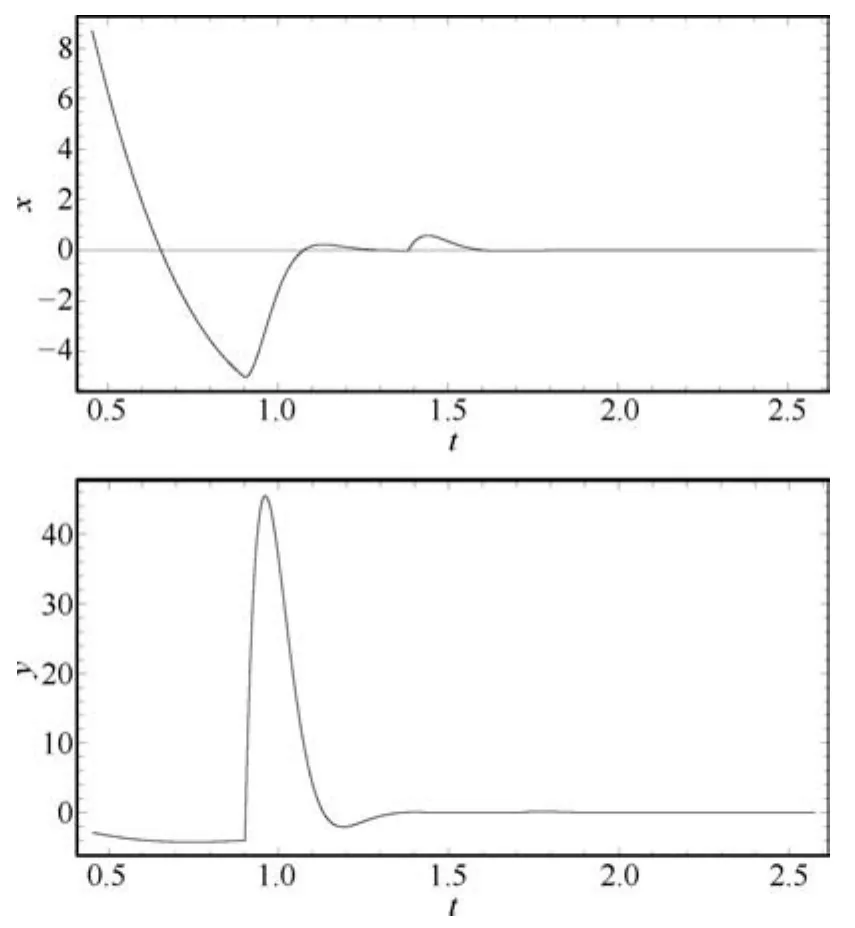
图1 第一次仿真运行结果Fig.1Simulation results in the first run

图2 第二次仿真运行结果Fig.2Simulation results in the second run
4 结语
切换系统与一般系统的一个不同之处就是切换动作对系统行为的影响,其中最为常见的就是超调的影响.超调会使由稳定子系统组成的切换系统经切换变为不稳定,所以实现系统镇定需消除超调对系统的不利影响.本文研究一类具有一致完全可控性的时变线性切换系统的指数镇定问题.通过引入带权格拉姆可控阵,设计出含有设计参数的状态反馈镇定控制器,并利用比较原理给出闭环系统状态转移矩阵的超调估计.在切换规则满足驻留时间假设的前提下,对驻留时间已知和未知两种情况分别选择设计参数消除切换超调的影响,建立了两个时变线性切换系统指数镇定的结论.这两个结论将驻留时间条件下的定常线性切换系统的镇定结论推广至时变情形.
附录引理1的证明


对这一微分不等式应用比较定理[17],得出

根据G(α,t,t+δ)定义及e4α(t-σ)的单调性,有

所以

于是

代入式(A2)整理可得

因为Φ(α,δ,t,s)是系统(A1)的状态转移矩阵,所以,代入式(A3)并利用矩阵范数定义就可得到

References
1 Shorten R N,Narendra K S,Mason O.A result on common quadratic Lyapunov functions.IEEE Transactions on Automatic Control,2003,48(1):110-113
2 Cheng D Z.Stabilization of planar switched systems.Systems and Control Letters,2004,51(2):79-88
3 Fu Zhu-Mu,Fei Shu-Min.Robust H∞dynamic output feedback stabilization for a class of uncertain switched singular systems.Acta Automatica Sinica,2008,34(4):482-487(付主木,费树岷.一类不确定切换奇异系统的动态输出反馈鲁棒H∞控制.自动化学报,2008,34(4):482-487)
4 Song Xiu-Lan,Yu Li.Robust stabilization of arbitrary switched linear systems and its application to switching control of DC-DC converter.Journal of Systems Science and Mathematical Sciences,2014,34(12):1475-1485(宋秀兰,俞立.任意切换线性系统的鲁棒镇定及其DC-DC变换器切换控制.系统科学与数学,2014,34(12):1475-1485)
5 Agrachev A A,Liberzon D.Lie-algebraic stability criteria for switched systems.SIAM Journal on Control and Optimization,2001,40(1):253-269
6 Dayawansa W P,Martin C F.A converse Lyapunov theorem for a class of dynamical systems which undergo switching.IEEE Transactions on Automatic Control,1999,44(4):751-760
7 Branicky M S.Multiple Lyapunov functions and other analysis tools for switched and hybrid systems.IEEE Transactions on Automatic Control,1998,43(4):475-482
8 Geromel J C,Colaneri P.Stability and stabilization of continuous-time switched linear systems.SIAM Journal on Control and Optimization,2006,45(5):1915-1930
9 Zhao J,Hill D J.On stability,L2-gain and H∞control for switched systems.Automatica,2008,44(5):1220-1232
10 Long L J,Zhao J.H∞control of switched nonlinear systems in p-normal form using multiple Lyapunov functions. IEEE Transactions on Automatic Control,2012,57(5):1285-1291
11 Hespanha J P.Uniform stability of switched linear systems:extensions of LaSalle's invariance principle.IEEE Transactions on Automatic Control,2004,49(4):470-482
12 Cheng D Z,Guo L,Lin Y D,Wang Y.Stabilization of switched linear systems.IEEE Transactions on Automatic Control,2005,50(5):661-666
13 Lin Xiang-Ze,Zou Yun.An integral invariance principle for switched linear systems.Acta Automatica Sinica,2011,37(2):196-204(林相泽,邹云.线性切换系统的积分不变性原理.自动化学报,2011,37(2):196-204)
14 Zhao X D,Yin S,Li H Y,Niu B.Switching stabilization for a class of slowly switched systems.IEEE Transactions on Automatic Control,2015,60(1):221-226
15 Kalman R E.Contributions to the theory of optimal control. Boletin de la Sociedad Matematica Mexicana,1960,5(2):102-119
16 Ikeda M,Maeda H,Kodama S.Estimation and feedback in linear time-varying systems:a deterministic theory.SIAM Journal on Control,1975,13(2):304-326
17 Huang Lin.Stability Theory.Beijing:Beijing University Press,1992.(黄琳.稳定性理论.北京:北京大学出版社,1992.)
王兴平海军航空工程学院系统科学与数学研究所副教授.主要研究方向为非线性系统和多智能体系统.E-mail:wangxpyan@hotmail.com(WANG Xing-PingAssociate professor at the Institute of Systems Science and Mathematics,Naval Aeronautical and Astronautical University.His research interest covers nonlinear systems and multi-agent systems.)
Exponential Stabilization of Switched Time-varying Linear Systems
WANG Xing-Ping1
The paper considers the exponential stabilization problem for switched time-varying linear systems with dwell time.Under the uniformly complete controllability condition,parameterized feedback controllers are designed by introducing the weighted controllability Gramian.Furthermore,an estimation of overshoots of the state transition matrix is derived using the comparison principle.By choosing the parameters to absorb the resulting overshoots,two exponential stabilization results are given for the cases of known and unknown dwell time.Finally,the effectiveness of the results is illustrated by a numerical example.
Switched time-varying linear systems,dwell time,overshoot,state transition matrix,exponential stabilization
Manuscript August 31,2015;accepted February 15,2016
10.16383/j.aas.2016.c150540
Wang Xing-Ping.Exponential stabilization of switched time-varying linear systems.Acta Automatica Sinica,2016,42(9):1440-1444
2015-08-31录用日期2016-02-15
本文责任编委孙希明
Recommended by Associate Editor SUN Xi-Ming
1.海军航空工程学院系统科学与数学研究所烟台264001
1.Institute of Systems Science and Mathematics,Naval Aeronautical and Astronautical University,Yantai 264001
