棱镜组件安装误差自动化标定方法研究
2016-11-03司高潞马步川张志伟
司高潞,马步川,郑 涛,张志伟
(1.中北大学信息与通信工程学院,太原030051;2.北京航天控制仪器研究所,北京100039)
棱镜组件安装误差自动化标定方法研究
司高潞1,2,马步川2,郑涛2,张志伟1
(1.中北大学信息与通信工程学院,太原030051;2.北京航天控制仪器研究所,北京100039)
导弹制导系统常用直角棱镜来确定惯性系统的方位敏感轴方向。直角棱镜在惯性系统上的安装误差会直接影响导弹的精确打击能力。目前的安装误差测试方法自动化程度低、费时费力、精度误差大。因此,提出棱镜组件的自动化测试方法,能减少基准传递,提高测试精度,标定精度能控制在2″(α),3″(β)。
惯性导航;直角棱镜;方位瞄准
0 引言
导弹发射前需要对其控制系统的惯性器件进行初始方位对准,通过一套高精度瞄准设备将精度测量的大地方位基准传递到弹上惯性系统。导弹制导系统中惯性器件的方位敏感轴方向是借助于直角棱镜来确定的,直角棱镜也称为瞄准基面。直角棱镜组合安装在惯性系统上,直角棱镜在安装时要求棱镜的棱脊与惯性器件的方位敏感轴平行,棱镜法线方向表示发射方向。棱镜的安装误差会对方位误差瞄准产生影响并直接影响到导弹的命中精度。
1 瞄准棱镜的安装误差对方位瞄准的影响
瞄准棱镜的安装误差如图1所示,包括以下两项。
α值:棱镜等效截面相对系统基准六面体在偏航方向上的安装误差(绕Y轴方向);
β值:棱镜等效截面相对系统基准六面体在滚转方向上的安装误差(绕X轴方向)。
其中,Y轴正方向竖直朝上,X轴与Z轴在水平方向上。
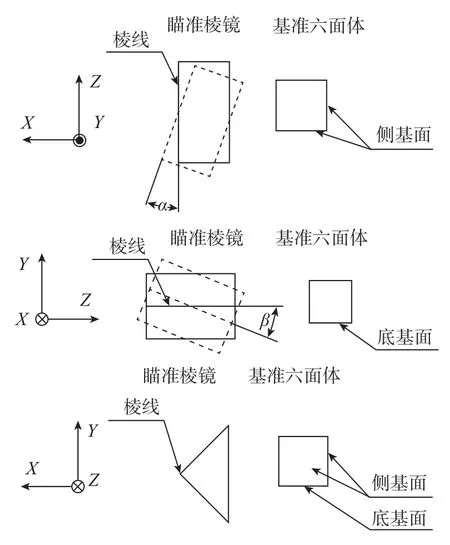
图1 瞄准棱镜安装误差示意图Fig.1 Aiming at the installation error of the prism
这两项误差将直接影响瞄准定向的精度。其中,α值将1∶1影响瞄准方位角。以下重点讨论β值对瞄准的影响。
棱镜的不水平度(β值)可表示为如图2所示。图2中虚线表示直角棱镜处于理想位置,棱线处于水平状态。当存在不水平度β时,棱镜处在实线位置。棱镜具有A1和A22个反射面,棱镜在理想位置时,平面A1和与XOZ平面成45°,与YOZ平面的交线位于YOZ平面的第二象限,其法线在第一象限,法向量为n1=[0 1 1];平面A2与XOZ平面成45°,与YOZ平面的交线位于YOZ平面的第一象限,其法线在第二象限,法向量为n2=[0-1 1];由几何关系可知棱线绕Z轴转过β角后平面A1的法向量n1=[sinβ cosβ 1]和平面A2的法向量n2=[-sinβ-cosβ 1]。如图2所示,假设入射光I1(a,b,c),经过第一次反射得到反射光,其用向量表示为[1-3]:
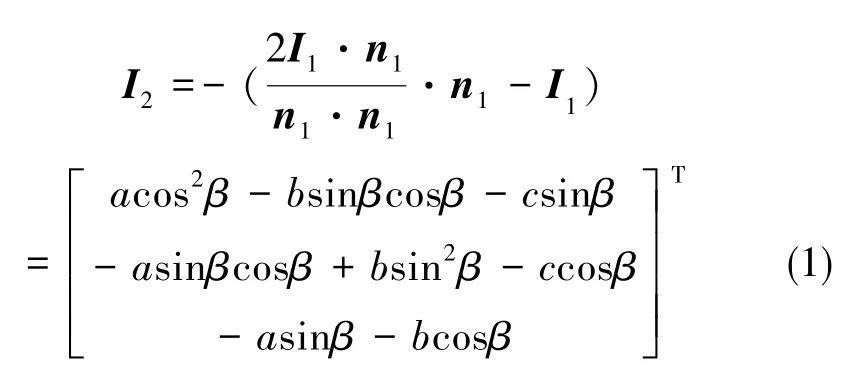
反射光I2经过反射后得到反射光I3,其用向量表示为:
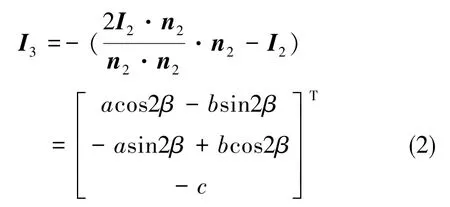
可得到入射光I1和反射光I3之间的夹角在XOZ平面的投影为α,则有[4]:
当入射光线I1以α角度俯仰入射到棱镜上时,其用向量表示为[0 sinα-cosα],得到:
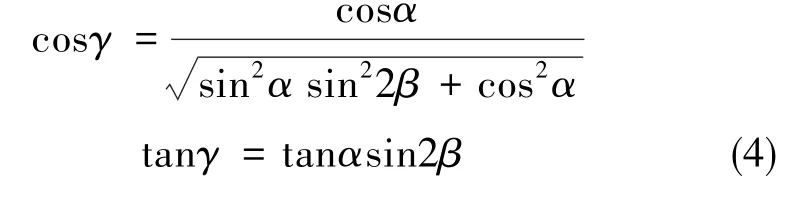

图2 直角棱镜光路图Fig.2 Optical path of right angle prism
由以上推导可得β值的影响是该误差乘以瞄准仪仰角的正切[5]。
综合α值和β值对瞄准方位的影响,可得:

式中,ΔA为方位转角,θ为测角仪器的俯仰角。
2 棱镜安装误差自动化测试方法
棱镜组件在平台系统装配和调试过程中,需要对安装误差进行调整和测试。目前测试方法较为落后,如图3所示,需要人工将多个自准直仪或经纬仪进行多位置摆放,多次基准传递后计算得到,存在的问题是:1)自动化程度低,人工操作,费时费力;2)基准传递过多,精度误差大;3)不同操作人员读数不一致;4)效率低。
图3 改进前测试方法Fig.3 Test method before improvement
鉴于以上问题,本文提出一种自动化测试方法[6-7]:用2台光电自准直仪(1#、2#)对准被测系统上的六面体或标准体上相应的基准平面镜,如图4所示。由2台光电自准直仪(3#、4#)对准被测系统或标准体上的棱镜,根据被测件与标准体测量值的差异,确定被测件上棱镜与六面体之间的相互位置关系。
棱镜安装误差对瞄准定向、方位角测量的影响如式(6)所示。
在测试时,1#自准直仪与被测六面体和基准棱体准直,读取俯仰角;2#自准直仪与被测六面体和基准棱体准直,读取方位角;3#和4#自准直仪以不同俯仰角与被测棱镜和基准棱镜准直,分别读取方位角。最终结果由软件计算得出。
由式(6)可知:
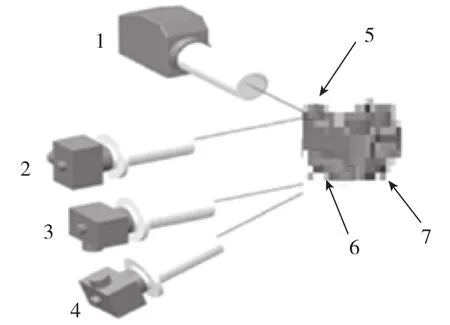
图4 改进后测试方法Fig.4 The improved method注:1—1#光电自准直仪;2—2#光电自准直仪;3—3#光电自准直仪;4—4#光电自准直仪2;5—被测六面体/标准体基准平面镜;6—被测瞄准棱镜/标准体基准棱镜;7—被测台体。
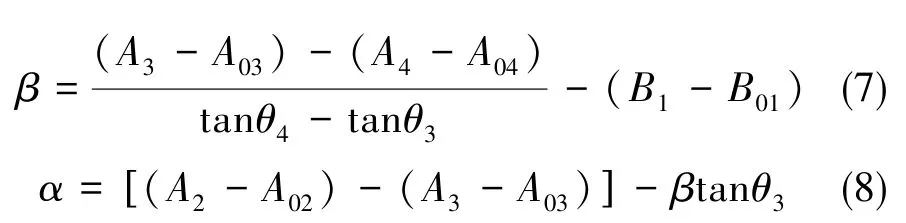
式中[8-9],B1为1#自准直仪与被测平台上的棱体准直时的俯仰角;B01为1#自准直仪与标准体上的棱体准直时的俯仰角;A3为3#自准直仪与被测平台上的棱镜准直时的方位角;A03为3#自准直仪与标准体上的棱镜准直时的方位角;A4为4#自准直仪与被测平台上的棱镜准直时的方位角;A04为4#自准直仪与标准体上的棱镜准直时的方位角;θ3为3#自准直仪与标准体上的棱镜准直时的俯仰角;θ4为4#自准直仪与标准体上的棱镜准直时的俯仰角;A2为2#自准直仪与被测平台上的棱体准直时的方位角;A02为2#自准直仪与标准体上的棱体准直时的方位角。
其中,θ3、θ4均为仪器的固定安装角,可以事先测得;B1、B01、A2、A02、A3、A03、A4、A04均为测试时的实测值,这样根据式(7)、式(8)即可以计算出α、β值。
3 试验结果
为了验证新方法的可行性,对平台系统进行了试验,测试数据如表1所示。
由表1可知,在用原方法、新方法对系统的棱镜组件安装误差测试试验中,原方法的α角测试结果极差最大可达2.7″,β角测试结果极差最大可达9.3″;而新方法α角测试结果极差最大为1.4″,β角测试结果极差最大为2.7″,证明了新方法的有效性,实际标定精度满足了小于3″的要求。
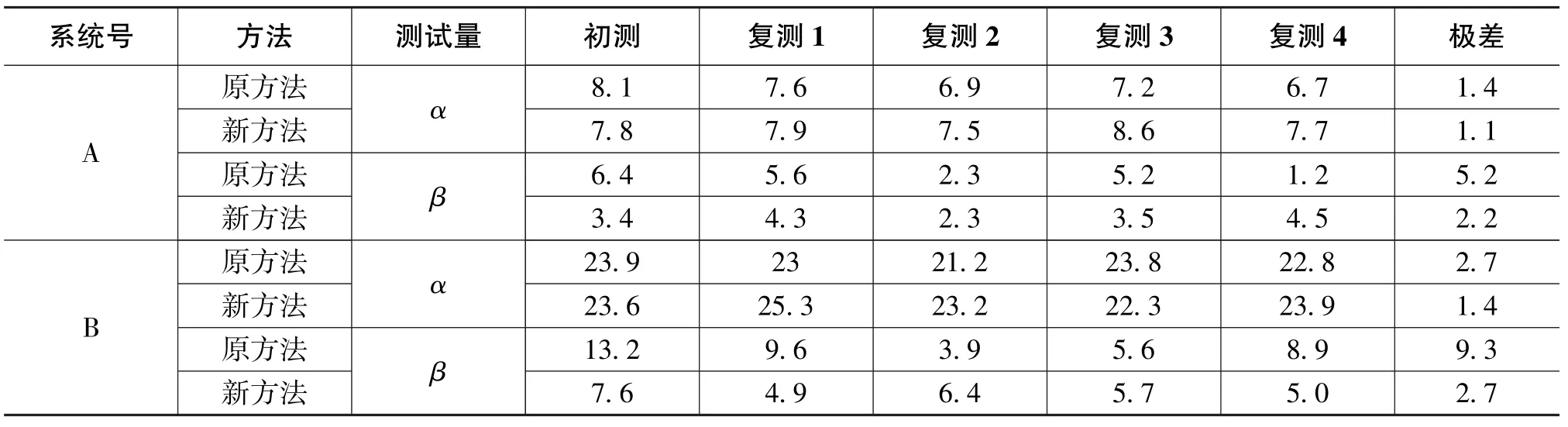
表1 棱镜组件安装误差标定结果Table 1 Calibration results of the installation error of the prism assembly
4 结论
本文针对直角棱镜在某惯性系统的方位误差、不水平度等不易标定的问题,对直角棱镜安装误差的标定模型进行了详细研究。解决了棱镜组件在台体的安装调试中,需多次通过外加多块标准体(六面体或多面体)、多套自准直仪在多方位进行基准转换的测试方法,实现了对棱镜组件在台体上安装误差的精确测试。并通过验证,证明了新方法对棱镜组件在系统上进行安装误差标定的可行性及有效性,也满足了型号生产需求。
[1]张俊杰,李政阳.直角棱镜用作自准直反光镜的光学特征[J].宇航计测技术,2009,29(4):1-3+21. ZHANGJun-jie,LIZheng-yang.Theoptical characteristics of right angle prisms as auto collimating mirror[J].Journal of Astronautic Metrology and Measurement,2009,29(4):1-3+21.
[2]关怀.平台棱镜组件安装精度控制[J].导航与控制,2002,1(1):50-53. GUAN Huai.Installation precision control of the right angle prism[J].Navigation and Control,2002,1(1): 50-53.
[3]郭贺,王建钊,罗长州.棱脊大角度倾斜下的瞄准误差分析[J].红外与激光工程,2011,40(1):138-142. GUO He,WANG Jian-zhao,LUO Chang-zhou.Influence of prism with large-angle tilt on aiming accuracy[J].Infrared and Laser Engineering,2011,40(1):138-142.
[4]凌东尧,沈东凯.光电自准直仪关键技术研究[J].中国新技术新产品,2014(13):23-26. LING Dong-yao,SHEN Dong-kai.Research on the key technology of photoelectric auto collimator[J].China New Technologies and Products,2014(13):23-26.
[5]赵军丽,吴易明,高立民.直角棱镜棱脊不平度的检测方法[J].红外与激光工程,2013,42(1):228-232. ZHAOJun-li,WUYi-ming,GAOLi-min.Detecting method of right-angled prism tilting[J].Infrared and Laser Engineering,2013,42(1):228-232.
[6]李庆辉,陈良益,高立民.箭上直角棱镜误差对方位瞄准精度的影响[J].中国空间科学技术,1998,2(1): 61-65. LI Qing-hui,CHEN Liang-yi,GAO Li-min.The influence of the right angle prism error on the accuracy of azimuth[J].Chinese Space Science and Technology,1998,2(1): 61-65.
[7]匡萃方,冯其波,刘欣.用矢量方法分析角锥棱镜直角误差对其光路反射特性的影响[J].光学仪器,2003,25(4):55-58. KUANG Cui-fang,FENG Qi-bo,LIU Xin.Analysis of the influence of corner cube right angle error of the optical path reflection characteristics with vector method[J]. Optical Instrument,2003,25(4):55-58.
[8]Zhang W W,Chen Q,He W J,et al.Modulation transfer function of the electron multiplying CCD[J].Journal of New Industrialization,2011,1(2):44-55.
[9]Zhu F,Tan J B,Cui J W.Beam splitting target reflector based compensation for angular drift of laser beam in laser auto collimation of measuring small angle deviations[J]. Review of Scientific Instruments,2013,84(6):124-131.
Study on Automatic Calibration Method of the Installation Error of the Prism Assembly
SI Gao-lu1,2,MA Bu-chuan2,ZHENG Tao2,ZHANG Zhi-wei1
(1.College of Information and Communication Engineering,North University of China,Taiyuan 030051;2.Beijing Institute of Aerospace Control Devices,Beijing 100039)
The guidance system of missile guidance system is usually used to determine the orientation of inertial platform.The installation error of the right angle prism on the inertial platform can directly affect the accuracy of the missile. The current installation error test method is of low degree of automation,time consuming and great accuracy error.In this paper,we propose a method for automatic test of prism assembly,which can reduce the reference and improve the test precision.Calibration accuracy can be controlled in 2″(α),3″(β).
inertial navigation;right angle prism;azimuth aiming
TN247
A
1674-5558(2016)05-01207
10.3969/j.issn.1674-5558.2016.05.016
司高潞,男,电子与通信工程专业,硕士,研究方向为光电探测技术。
2015-10-23