有限试验状态下面对称飞行器气动建模方法①
2016-11-03李富贵
李富贵,赵 洪
(中国运载火箭技术研究院,北京 100076)
有限试验状态下面对称飞行器气动建模方法①
李富贵,赵洪
(中国运载火箭技术研究院,北京100076)
为在有限的风洞试验状态下完成面对称飞行器的气动建模,提出了一套风洞试验方案及试验数据应用和扩展方法。利用该方法可抑制控制引起的气动非线性问题,同时可在少量试验状态下完成气动建模。首先建立了气动模型,分析了BTT控制下传统方法引起的气动建模偏差,针对该问题提出了气动建模的改进方法。分析总结出面对称飞行器具有几何对称性、镜像对称性、气动可叠加性和相似性等气动特点。依据上述特点,筛选出气动建模时所需进行风洞试验的基本态,通过风洞试验,获得基本态试验数据后,基于气动规律,利用扩展方法,可扩展得到全飞行包络下的气动参数。在数据扩展时,充分考虑了建模的精确性,提出了基于每片舵的“零舵状态+舵增量状态”的扩展方法,以充分降低非线性造成的建模偏差。最后,结合某面对称飞行器的吹风试验结果,验证了文中提出方法的有效性。
面对称飞行器;风洞试验;数据扩展;有限状态
0 引言
为对飞行器的气动进行准确建模,风洞试验的重要性不言而喻[1]。对于研制成本和研制周期受限的飞行器来说,尽量减少风洞试验状态,提高数据拓展使用有效性,在最少的试验状态下,建立起较准确的模型显得非常必要[2]。当前,出现了越来越多的面对称飞行器,对这类飞行器进行建模时要比轴对称飞行器更加复杂。受吊耳等附件的影响,即使设计为轴对称的飞行器也存在上下气动不对称的问题,在对这类飞行器建模时,也需按面对称飞行器的方式处理。
传统飞行器进行三通道控制时[3],由制导律可得每个通道的控制指令,进而由控制律可得每个通道的等效舵偏指令,使用舵等效分解法,可得每个舵面的偏转指令,经舵机动力学后,可得每个舵面的实际偏转角,利用舵等效合成法,可得三通道等效合成舵偏值,然后利用该值进行气动扩展计算。当舵偏转较大时,上述过程会出现较严重的非线性失真,致使气动建模出现较大误差。
考虑前述问题,结合面对称飞行器的气动特点,本文构造了一种吹风试验状态量少,但能较准确反映飞行器气动特性的风洞试验方案。基于该试验方案,提出了与之匹配的试验数据应用与扩展方法。利用该方法可在较少的吹风试验状态下,较精确地构建出飞行器气动模型。该方案的核心是首先通过吹风试验获得必须的基本态试验数据,然后依据飞行器气动特点,对基本态气动数据进行扩展,以获得全状态的气动参数。文中通过某面对称飞行器风洞试验数据的应用和拓展,验证了方案的正确性、算法的合理性和有效性。
1 模型建立
首先定义相关坐标系和重要角度[4],文后的坐标原点均取在导弹质心o处。弹体坐标系oxbybzb:oxb轴与弹体纵轴重合,指向头部为正;oyb轴在弹体纵向对称面内与oxb轴垂直,指向上为正;ozb轴垂直于oxbyb平面,方向按右手直角坐标系确定。全攻角弹体坐标系oxnynzn:oxn轴与弹体纵轴重合,oxnyn平面为全攻角面,oyn向上为正,ozn与oxn和oyn构成右手直角坐标系。吹风坐标系oxwywzw:oxw轴与风洞来流方向一致,oyw在铅垂平面向上为正,ozw与oxw和oyw构成右手直角坐标系。定义全攻角αT为来流oxw与弹轴oxb间的夹角,气动滚转角Φ为全攻角坐标系oxnynzn绕oxn轴旋转Φ角,即可得到弹体坐标系。
攻角、侧滑角和全攻角与气动滚转角的转换关系见式(1)。其中,αT的定义域为[0,90°],Φ的定义域为[-180°,180°]。
(1)
飞行器气动建模时,需获得气动力系数分量和力矩系数分量[5],在弹体系下分别对应轴向力系数CA,法向力系数CN,侧向力系数CZ,滚转力矩系数mx,偏航力矩系数my,俯仰力矩系数mz,这些气动系数是马赫数Ma、全攻角αT、气动滚转角Φ和舵偏角δ的函数,通常飞行器有四片舵,可把它们称作δ1、δ2、δ3、δ4。此时,气动力和气动力矩系数可用函数f(Ma,αT,Φ,δ1,δ2,δ3,δ4)描述。由于资源、时间等限制,只能选择有限的特征点进行试验,特征点的选择是关键问题。图1给出了等效舵偏角的定义图(从飞行器尾部向前看)。其中,δ1、δ2、δ3、δ4为弹上四片舵,而δa、δe、δr代表了控制过程中等效的副翼、升降舵和方向舵。
2 控制气动非线性问题
对于面对称飞行器,通常采用BTT控制,在BTT控制过程中会引起气动非线性问题[6],这对气动建模提出了新的要求。图2给出了BTT控制系统框图,BTT控制时,首先根据导弹和目标当前的位置和速度通过制导律生成三通道驾驶仪指令,三通道驾驶仪根据导弹当前状态和驾驶仪指令,生成对应的三通道等效舵偏角指令。使用舵等效分解的方法,把三通道等效舵偏角指令可分解成四通道的物理舵偏转指令如式(2)所示,据此控制四片舵偏转,控制导弹飞行。在仿真时,普遍采用的方式是得到四通道等效舵偏后,经过舵机模型后,得到四通道实际偏转舵偏;然后,再使用舵等效合成的方法,把四通道舵等效合成为三通道等效舵如式(3)所示;最后,再使用合成后的三通道等效舵计算导弹所受的气动力和气动力矩。
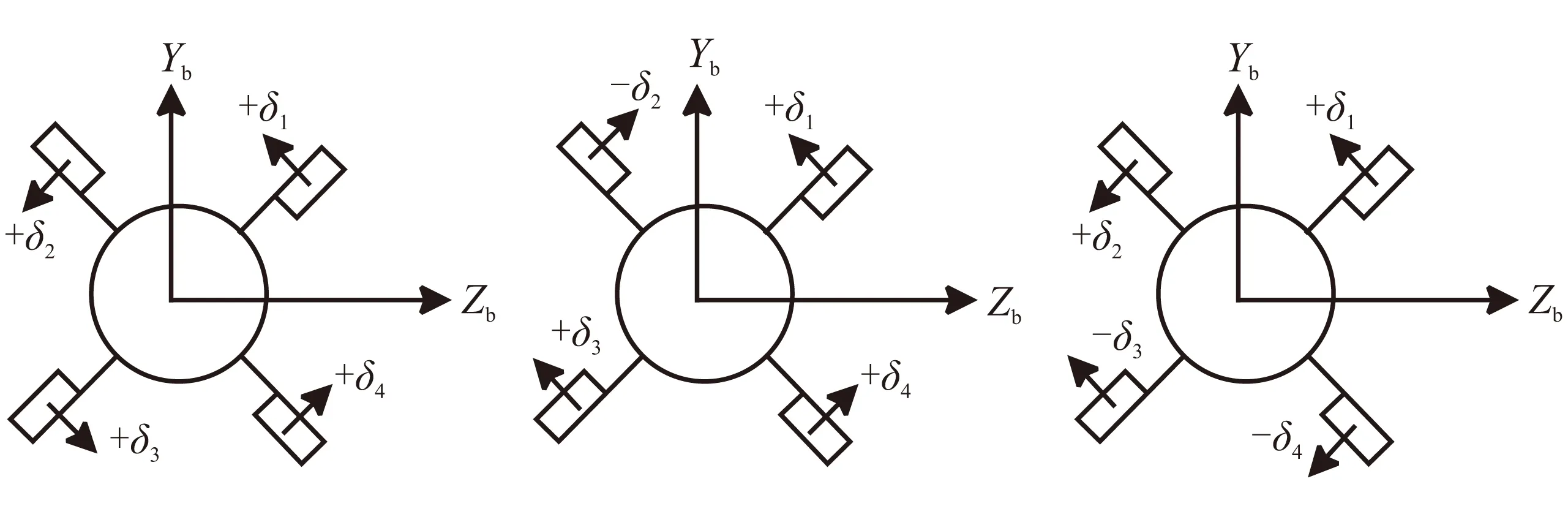
(a)δa>0 (b)δe>0 (c)δr>0

图2 BTT控制系统框图
(2)
(3)
而问题就出现在前述采用等效舵计算气动力和气动力矩的步骤上。实际作用在飞行器上的气动力是由四片舵偏转产生的,当δ1、δ2、δ3、δ4偏转很大时,气动特性已处于严重的非线性区,但通过式(3)得到的等效舵偏δa、δe、δr仍可能很小,仍处于气动线性区,这在气动计算中会带来很大误差,下面举例说明。假设考虑气动非线性时,气动力与舵偏的关系如式(4)所示。
(4)
如先由每片舵偏等效计算得等效舵偏,再由等效舵偏计算气动力,则由式(4)可得三通道的气动力如式(5)所示。
(5)
如先使用每片舵偏计算得单独的气动力,再叠加成合成气动力,则由式(3)和式(4)可得,三通道的气动力如式(6)所示。
当δa=10、δe=10且δr=10时,对应δ1=30、δ2=10、δ3=-10、δ4=10,此时δ1很大,会导致气动特性存在严重的非线性。表1给出了采用式(5)和式(6)计算得的结果。从中可知,采用等效舵计算气动力时,非线性会导致计算出现很大的偏差。由表1可知,采用每片舵计算完气动力和力矩后再叠加,可在建模时充分考虑气动非线性的影响,这对风洞试验方案和数据的拓展应用有重要影响。

表1 气动力计算结果对比
3 面对称飞行器气动特性
3.1几何对称性
面对称飞行器具有几何对称性。从弹体尾部沿纵轴向前看,面对称飞行器左右对称,上下不对称。于是风洞试验时,必须同时吹正负攻角的状态,侧滑角可只吹单侧,未吹风的状态利用几何对称等效得到。
3.2镜像对称性
面对称飞行器具有镜像对称性。如图3所示,正舵正迎角镜像对称于负舵负迎角状态,正舵负迎角镜像对称于负舵正迎角状态,对应的舵面迎角大小相等,方向相反,舵产生的力和力矩大小相等、方向相反。由此吹风时,可只吹单侧舵(正或负)的状态,未吹风状态利用镜像对称等效得到。
3.3气动可叠加性
面对称飞行器气动具有可叠加性。可把对气动的贡献分解为舵面的贡献和飞行器其他部件的贡献。因此可把舵面对气动的贡献分解为每片舵的单独贡献。
3.4相似性
面对称飞行器气动具有相似性。当每片舵偏转相同的角度时,每片舵对气动的贡献值相同。因试验中不可能对δ1、δ2、δ3、δ4状态的任意组合都进行试验,基于可叠加性和相似性假设,在吹风中,可令δ1、δ2、δ3、δ4偏转角度相同,而方向出现组合,构造出δ1=δ2=δ3=δ4=δa(δa状态),δ1=-δ2=-δ3=δ4=δe(δe状态),δ1=δ2=-δ3=-δ4=δr(δr状态)3个大状态,这样会大大缩减吹风状态。

图3 镜像对称特性
4 风洞试验方案及试验数据拓展
利用面对称飞行器的几何对称性、镜像对称性、气动可叠加性和相似性,可构造一种吹风状态少,但能较准确描述飞行器特性的风洞试验方案,如表2所示。其中舵只吹非正等效状态,气动滚转角需试验0°~90°和-180°~-90°的状态,相匹配的全攻角只试验非负状态。风洞试验状态的特征值根据飞行器的飞行条件及气动特性决定。从表2知,总试验状态为NΦNMaNαT(Nδa+Nδe+Nδr),其中Nx代表变量x的吹风状态数。

表2 风洞试验状态
根据前面设计的风洞试验方案,对面对称飞行器进行风洞试验,便可得到相应气动数据。图4给出了相应的风洞试验数据使用基本思路,依据可叠加性,任一状态的气动值f(Ma,αT,Φ,δ1,δ2,δ3,δ4)可分解为零舵状态f(Ma,αT,Φ,δ1=0,δ2=0,δ3=0,δ4=0)的值加上每片舵增量状态Δf(Ma,αT,Φ,δ1,δ2,δ3,δ4)值。
4.1零舵状态气动系数计算
气动系数随气动滚转角的变化规律类似三角曲线,在对气动滚转角拓展时使用三次多项式[2]插值方法求取。而气动系数随马赫数、全攻角和舵偏角的变化规律可用线性插值方法拓展。零舵状态的气动系数即使用舵为零时的气动数进行拓展,主要考虑气动滚转角、马赫数和全攻角对气动数据的影响,如式(7)所示。其中,Φi代表吹风节点上的气动滚转角值,hΦi(Φi,Ma,αT,δ=0)表示在每个气动滚转角吹风节点Φi上使用δ1=δ2=δ3=δ4=0的吹风试验数据,对Ma、αT进行线形插值,求得得到中间值hmi。gΦ表示使用拉格朗日三次多项式,利用中间值hmi对状态Φ插值,求得最终值。
(7)

图4 风洞试验数据拓展思想
4.2舵增量状态气动系数
按弹体系对气动系数可进行分类处理,可有效减少工作量。CA和mx沿xb轴,用fx表示,CN和mz沿yb轴,用fy表示,CZ和my沿zb轴,用fz表示。舵间耦合小时,可略去耦合的影响。此时,δ1、δ2、δ3、δ4对fx、fy和fz的贡献,可分别由对应的δa、δe和δr状态的试验数据求得。如考虑舵间耦合,则需利用正交方向的等效舵的数据进行计算,方法与上述一致。每片舵和其对应的等效舵的大小相同,对气动力和气动力矩的贡献值如式(8a)~式(8c)所示。方便起见,把δi(i=1,2,3,4)对应的δa、δe和δr状态的等效舵分别记为δdai、δdei和δdri。
(8a)
(8b)
(8c)
舵增量状态的气动数据即由舵单独产生的气动力和气动力矩。可由式(9)计算得每片舵对各通道的气动力和气动力矩贡献值。
(9)
i=1,2,3,4
而四片舵对每个通道气动力和力矩的贡献值等于每片舵在该通道的贡献之和的叠加,见式(10)。
(10)
4.3气动系数对Φ角拓展
由于只对0≤Φ≤90°和-180°≤Φ≤-90°状态进行了试验,需利用几何对称性,对剩余Φ状态进行数据拓展。-90°≤Φ≤0和90°≤Φ≤180°的状态分别使用0≤Φ≤90°和-180°≤Φ≤-90°状态的数据进行拓展。拓展时,应使气动力和气动力矩系数的物理意义与不同的Φ角相对应,如式(11a)和式(11b)所示。
i=1,2,3,4
(11a)
i=1,2,3,4
(11b)
4.4气动系数正舵状态拓展
风洞试验中,只对非负舵状态进行了风洞试验,正舵状态的数据需利用镜像对称性利用负舵状态的数据进行扩展。由于α、β与αT和Φ一一对应,方便起见,对正舵状态的气动系数进行扩展时,使用α和β替代αT和Φ,由镜像对称性可得,升降等效舵δdei>0对应的法向力和升降力矩可由式(12)获得,方向等效舵δdri>0对应的侧向力和偏航力矩可由式(13)获得,副翼等效舵δdai>0对应的轴向力和滚转力矩可由式(14)获得。
(12)
(13)
(14)
5 试验验证
以某飞行器为例,按照前述思想进行风洞试验,可得到试验数据,并采用前述思想,可对数据进行扩展。以CN为例,图5给出了在Ma、αT、δ一定的条件下,CN随Φ角的变化曲线,图中关于Φ的吹风节点只有10个,使用前面算法利用节点数据,可得到任意Φ状态下的气动值,同时也看出CN随Φ的变化规律接近于余弦曲线,使用拉格朗日三次多项式插值是合理的。
图6给出了在Ma、Φ一定的条件下,δe=-20°、0°、20°时,CN随αT角的变化曲线,依据前文算法利用负舵节点数据,可得到正舵状态下的气动值。由图6可知,在舵角为-20°、攻角小于-5°时,出现了非线性现象,表示舵迎角出现了饱和。这意味着在舵偏角为20°且攻角大于5°时,也会出现非线性现象,图6扩展得到的正舵状态的气动曲线正好印证了这一结论,由此也说明了利用镜像对称进行气动扩展的合理性。
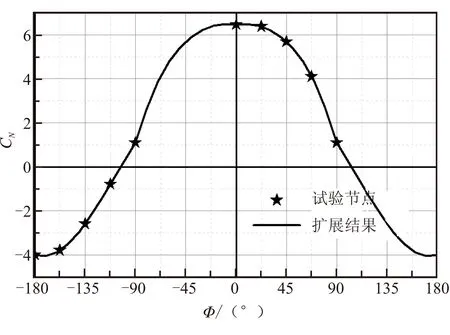
图5 CN随Φ角变化曲线

图6 在不同舵偏角下CN随αT角变化
6 结论
(1)总结出了一套风洞试验状态少、建模准确性高的气动建模方案,可用于指导风洞试验方案的制定和试验数据的拓展使用。
(2)总结出面对称飞行器具有几何对称性、镜像对称性、相似性和可叠加性的气动特点,据此提出风洞试验时,只需试验负等效舵偏状态、0°~90°和-180°~-90°的气动滚转角状态和非负全攻角状态;然后,通过拓展方法可获得全状态的气动参数,可大幅减少风洞试验状态,降低试验成本,缩减试验周期。
(3)根据气动参数随吹风状态量变化的特点,文中提出的分状态处理、逐级综合的数据拓展使用方法,可显著降低气动非线性拓展误差、模型等效拓展误差和控制耦合拓展误差,具体表现为:在对气动滚转角拓展时,使用三次曲线拟合;在对马赫数、全攻角、舵偏角拓展时,使用“零舵状态+舵增量状态”的拓展方法;在对舵增量状态拓展时,使用基于每片舵的气动参数合成方法。试验验证结果表明,文中所提出的方法合理正确,工程上可行。
[1]孙宝彩.巡航飞行导弹BTT自动驾驶仪设计方法研究[D].北京:北京理工大学,2007.
[2]李富贵.最优制导律、最优估计在先进空空导弹制导中的理论和工程应用研究[D].北京:北京理工大学,2014.
[3]Qi Z K,Xia Q L.Guided weapon control systems[M].Beijing:Beijing Institute of Technology Press,2004.
[4]Paul Zarchan.Tactical and strategic missile guidance[M] .Virginia:American Institute of Aeronautics and Astronautics,2004.
[5]P Zarchan,Edwin Greenberg,Joel Alpert.Improving the high altitude performance of tail-controlled endoatmospheric missiles[C]//AIAA Guidance,Navigation and Control Conference and Exhibit,2002.
[6]Li F G,Xia Q L,Qi Z K.Flight test for identifying the control model and terminal strike with bank to turn maneuvering:study on the unmanned aerial vehicle platform[C]//Proc.of the International Conference on E-Product,E-Service and E-Entertainment,2010:58-62.
(编辑:吕耀辉)
Modeling a plane-symmetric flight vehicle under limited states
LI Fu-gui,ZHAO Hong
(China Academy of Launch Vehicle Technology,Beijing100076,China)
In order to construct a model of plane-symmetric flight vehicle under limited wind tunnel test states.A scheme of wind tunnel test and test data utilizing and expanding methods were proposed.With these methods the least states will be needed,and the aerodynamic nonlinear induced by the control system could be restrained.The aerodynamic model was constructed,and the shortage using equivalent fin was analyzed.Aerodynamic characteristic of plane-symmetric flight vehicle was summarized,such as geometric symmetry,mirror symmetry,addible peculiarity,and comparability.Then a small quantity of test state used for accurate model called foundational state was selected out. Using the test data of foundational state the aerodynamic parameters of all flight state can be brought out.The aerodynamic nonlinear induced by the synthesis and analysis of fins in the process of control was taken in to account,and a method called “zero state +deflection state”based each fin was presented to minimize the model error due to aerodynamic nonlinear.Then the availability of the methods was validated with the wind tunnel test result of a plane-symmetric flight vehicle.
plane-symmetric flight vehicle;wind tunnel test;data expansion;limited states
2015-05-03;
2015-07-17。
李富贵(1986—),男,博士,研究方向为飞行器制导控制设计、总体设计。E-mail:lfg200410792@sina.com
V411
A
1006-2793(2016)03-0417-05
10.7673/j.issn.1006-2793.2016.03.024