一种新型打气装置的结构设计与分析
2016-10-29罗俏彭盼道吴上生
罗俏彭盼道吴上生
(1.广东省自动化研究所 广东省现代控制与光机电技术公共实验室广东省现代控制技术重点实验室 2.华南理工大学机械与汽车工程学院)
一种新型打气装置的结构设计与分析
罗俏1彭盼道2吴上生2
(1.广东省自动化研究所 广东省现代控制与光机电技术公共实验室广东省现代控制技术重点实验室 2.华南理工大学机械与汽车工程学院)
结合现有打气装置工作原理,设计一种新型双脚踩踏驱动打气装置。该装置主要由底座支架、气筒本体、曲柄和双臂摇摆杆等组成,通过双脚一上一下动作实现连续打气过程。分析打气过程中两气筒曲柄的位置关系并计算得到位置关系表达式,建立打气过程的平面五连杆运动学模型,采用逆运动学的几何解法求出在能量利用率最高的充气过程中各关节姿态角随曲柄转角的变化关系,并利用Matlab软件绘出各关节姿态角动态变化曲线,为提高该打气装置的能量利用率提供了理论依据;最后对充气过程进行受力分析和充气量计算,结果表明该装置非常省力且充气次数少。
双脚踩踏驱动;双臂摇摆杆;运动学模型;打气装置
0 引言
当前,我国汽车、电动车、自行车和摩托车保有量较大。随着经济的发展和环保意识的增强,人们在追求出行方便快捷的同时也越来越注意其行为的节能环保[1]。然而,车辆在使用一段时间后,由于漏气、亏气等原因,车轮轮胎气压会低于标准气压范围,这时必须用打气筒给轮胎充气,否则轮胎寿命会受到影响甚至出现安全隐患[2]。目前市场上的手动式、脚踏式和电动式气筒分别存在打气费力、耗时长、出气量少、不能连续打气、不方便携带、耗费能源等缺点[3]。
基于上述情况,本文设计一种双脚踩踏驱动打气装置。该装置主要由底座支架、气筒本体、曲柄和双臂摇摆杆等组成,通过双脚一上一下动作实现连续打气过程,具有打气效率高、输出气压大、省力、结构紧凑、可拆装等优点,适用于汽车、电动车、自行车和摩托车等轮胎的充气。
1 装置结构特点及其工作原理
双脚踩踏驱动打气装置结构如图1所示,2个气筒本体沿相反方向放置于双臂摇摆杆的左右两边,直线运动副和滑块连为一体在双臂摇摆杆上滑动,心轴插入到滑块的通孔与曲柄的套管中,在心轴末端加装开尾销,使左右两气筒与双臂摇摆杆活动连接,实现两脚踏气筒一上一下动作,连续打气的过程。双臂摇摆杆底部内嵌一摇摆连接块,通过螺钉实现两者连接,可灵活拆装。脚踏板为活动脚踏板,通过曲柄上的4个凸块限制脚踏板在一定范围内转动,这样可通过脚的灵活控制,踏板在不同位置对应不同姿态。
工作状态时,该装置的最大长宽高为330 mm ×248 mm×250 mm,长和高都是由双臂摇摆杆决定的,所占空间过大。在非工作状态时,可将双臂摇摆杆拆卸,其余零件重装原位,然后双臂摇摆杆以一定倾角斜放在装置上表面,这样最大长宽高为290 mm× 248 mm×110 mm,减小了体积,方便携带。

图1 (a) 斜视图
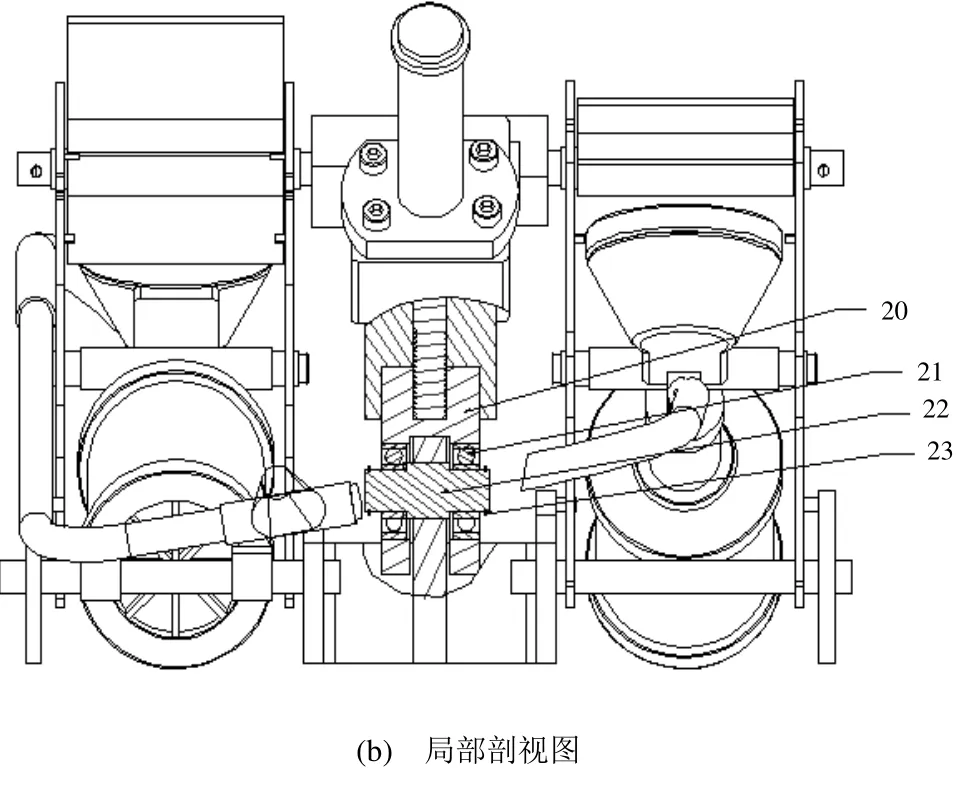
图1 双脚踩踏驱动打气装置结构图
充气过程:人双脚分别踩在左右踏板上,当一只脚向下踩脚踏板时,另一只脚自然向上提,类似人类行走。踩压踏板向下过程中气筒打气,以此往复动作实现连续打气。
2 装置机构设计
本装置的设计原理来源于转动导杆机构。转动导杆机构是由平面铰链四杆机构的一个转动副演化成移动副而来的平面连杆机构,该机构简图如图2所示,曲柄a长度大于机架c,曲柄a和导杆b均能做整周转动。
根据现有的单筒式脚踏气筒测得曲柄a的长度231 mm,最大转动角度42°,由双脚踩踏的对称性,可确定C点位于脚踏气筒水平方向的中间位置,就可确定AC的水平距离,因实际结构的需要设计成偏置机构,偏距取25 mm,c的长度即可确定。曲柄a、机架c和导杆b 3个向量构成封闭三角形,其关系按复数形式可以写成[4]

根据式(1)按实部与虚部分别相等,可解得b=160.5 mm。

图2 转动导杆机构简图
实际结构设计中因可拆卸设计要求,将导杆b设计成双臂摇摆杆,其结构如图3所示,起导杆作用部分的长度取140 mm,可满足要求。
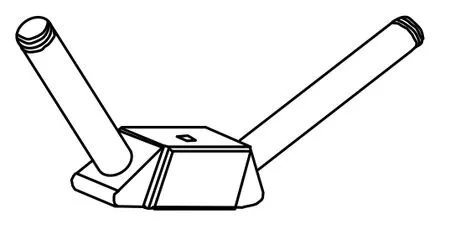
图3 双臂摇摆杆结构图
3 装置的运动学模型
3.1 气筒曲柄的位置关系分析
双脚踩踏驱动打气装置可连续充气,主要由于设计了双臂摇摆杆,实现2个单筒式脚踏气筒的串联,因此有必要分析打气过程2气筒曲柄的位置关系,位置分析简图如图4所示,假设曲柄a1运动至α1位置,求α2位置。由式(1)可求得θ1的表达式,已设计导杆b1与导杆b2的夹角为100°,则θ1与θ2、α1的关系为

根据式(2)消去b2得α2表达式

将式(2)代入式(3),即可得到α1与α2的位置关系表达式。

图4 位置分析简图
用Matlab软件绘出α2与α1、α1+α2与α1关系曲线如图5所示。由曲线可以看出,α2与α1的位置存在对应关系,这与双脚踩踏打气的设计原理相符合,同时验证了运动关系建立的正确性,但α1+α2之和却不是恒值,而是在小范围内变化。

图5 α2、α1+α2与α1关系曲线
3.2 打气过程的运动学分析
使用该装置打气时,人的左右脚分别踩在脚踏板上,即人站立在装置上,通过大腿摆动、小腿伸缩和脚踝调节踏板姿态实现打气动作。为简化分析,建立如图6所示的平面五连杆模型,该模型由大腿、小腿、脚踝和曲柄组成,各关节均为转动关节,通过对身高为170 cm,体重63 kg的人体测量得到大腿、小腿和脚踝关节到踏板转轴的长度分别为480 mm、460 mm和80 mm[6],大腿的转轴轴线在打气过程中位置只是存在微小变化,因此将其位置视为固定并在该位置建立基坐标系。
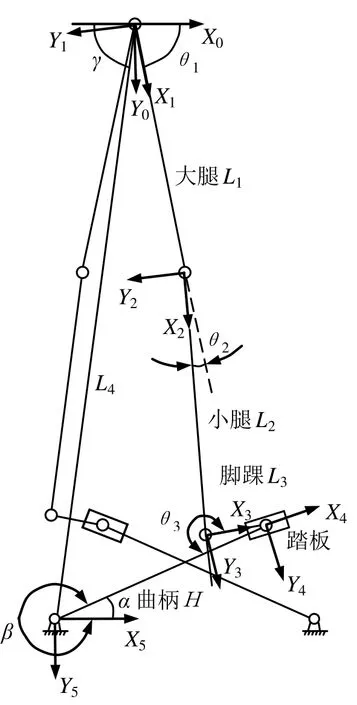
图6 平面五连杆模型
采用Denavit和Hartenberg提出的D-H表示法对大腿、小腿和脚踝建立坐标系[5],对应的D-H参数表如表1所示,在踏板上建立X轴与曲柄平行的踏板坐标系,最后在曲柄的转轴轴线上建立参考坐标系,所有坐标系的Z轴都垂直平面向外。
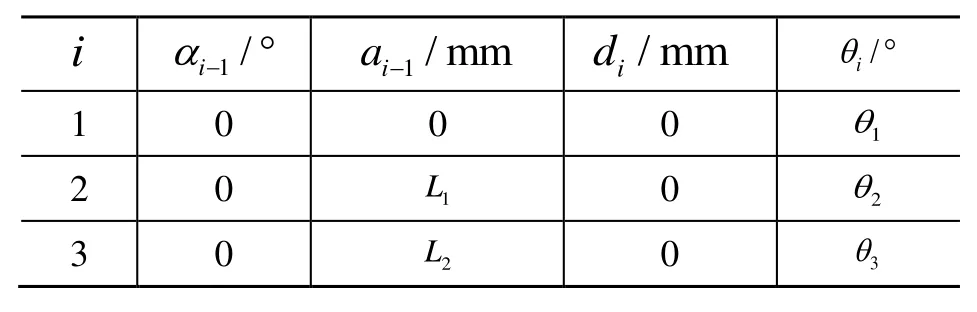
表1 坐标系的D-H参数表
为分析打气过程中大腿、小腿和脚踝的位置与姿态变化,需建立各连杆之间的运动关系,即建立各连杆坐标系的坐标变换关系。各连杆坐标系的有向变换图如图7所示,其中B代表基坐标系;T1是大腿坐标系;T2是小腿坐标系;T3是脚踝坐标系;G是踏板坐标系;S是参考坐标系;它们之间的位姿关系可用齐次变换矩阵描述。
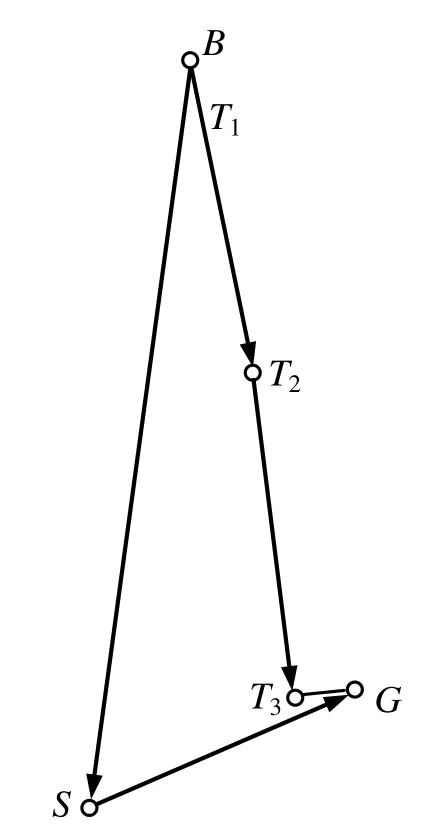
图7 各坐标系之间的有向变换图


通过式(4)可求得正向运动学变换矩阵

其中,cβ是cosβ的缩写,sβ是sinβ的缩写,cγ是cosγ的缩写,sγ是sinγ的缩写。
现在已经确定脚踝相对基坐标系B的位姿,需要求出大腿和小腿相对基坐标系的位姿,这属于逆运动学求解问题。假设各关节的姿态角为θ1、θ2和θ3,这里的姿态角仅表示各关节的姿态,而不是关节的转角。从大腿到小腿再到脚踝建立相对基坐标系的正向运动学变换矩阵
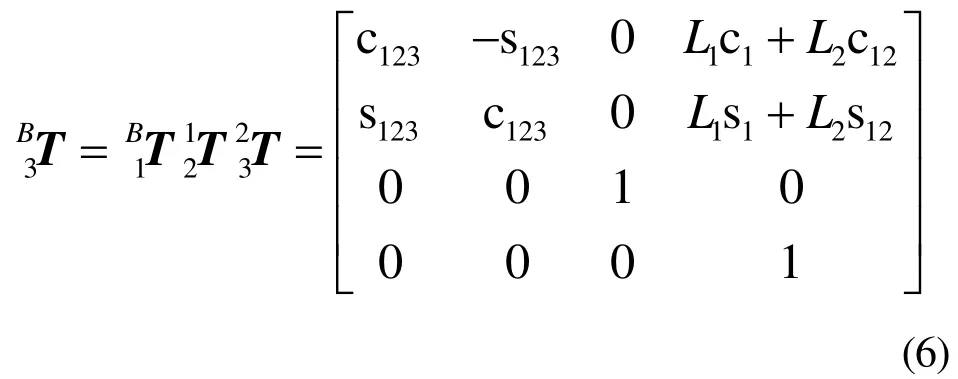
其中,c123是cos(θ1+θ2+θ3)的缩写,s123是sin(θ1+θ2+θ3)的缩写,c1,s1,c12和s12同理。
使用代数解法计算繁琐,耗时费力,当连杆数较少时,使用几何解法非常容易快捷,这里采用文献[5]给出的几何解法求出θ1、θ2和θ3。几何示意图如图8所示,连线基坐标系B原点和脚踝坐标系T3,组成三角形ΔBT2T3,由虚线表示的三角形是脚踝坐标系T3相对基坐标的位姿对应的小腿坐标系另一可能存在的解,但显然人的腿部不存在这种位姿,所以这里不考虑这种解。

图8 几何解法示意图
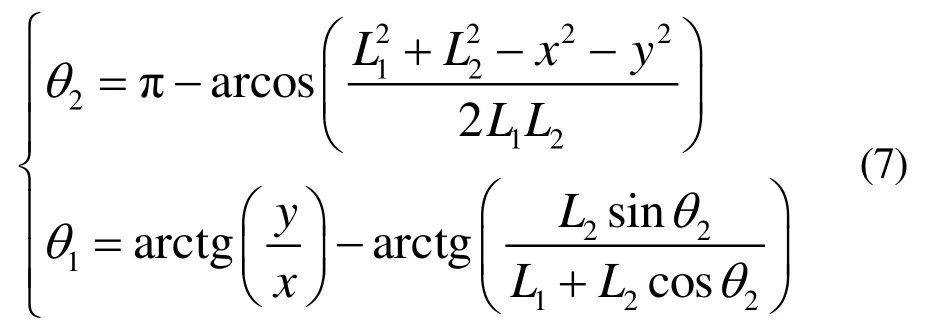
最后一根连杆的方位角是三连杆的角度之和

由式(8)可解出θ3,注意到β=360°-α,以360°-α替换θ1、θ2和θ3表达式的β,就可得出随曲柄转角α的变化相应的θ1、θ2和θ3的动态变化。用Matlab绘出θ1、θ2和θ3随α的动态变化曲线。
图9得到了在能量利用率最高的充气过程中各姿态角的动态变化曲线,因此,在实际充气过程中,要使该装置能量利用率尽量高,人体腿部的各关节姿态角应尽可能按图9所示变化。

图9 姿态角动态变化曲线
4 受力分析与充气量计算
在充气过程中,由于人体站立在装置上,因此重力就可作为踩踏气筒的动力,先计算利用全部重力而不施加额外力是否能够实现充气,设人体质量为60千克,小腿垂直于脚踏板向下,则产生的力矩:M1=FG×a1=588× 0.231=135.8 N· m 。一般情况自行车的轮胎气压比摩托车、小汽车高,根据自行车轮胎气压要求400 kPa~800 kPa,取800 kPa作为轮胎气压计算,气筒力臂L长85 mm,则产生的力矩为M2=FP×L=1270× 0.085=107.9N· m,由以上计算知,重力产生的力矩大于轮胎气压产生的力矩,因此充气过程非常省力,人体可以轻松地实现连续打气过程。
以左右两个脚踏气筒均完成一次充气过程为一次循环,活塞直径45 mm,行程80 mm,一次循环的充气量

常用自行车内胎直径约为660 mm,宽度约为30.8 mm,一次充满该内胎需储气量

理论需要充气循环次数

通过以上计算可得只需17次充气循环即可充满内胎,对比传统充气筒,由于回复过程不做功,且伴随充气过程轮胎气压的升高使充气变得费力,从而使充气次数,充气时间远远大于该新型充气装置。
5 结语
本文介绍了一种双脚踩踏驱动打气装置的结构特点及其工作原理,理论分析了该装置的可行性,运用矢量三角形法设计装置的转动导杆机构,确定了机构的尺寸参数,并根据结构需要设计了双臂摇摆杆。分析了两气筒曲柄的位置关系并计算出位置关系表达式,通过建立打气过程的平面五连杆运动学模型,采用逆运动学几何解法得到在理想化运动学模型各关节姿态角动态变化曲线,为提高打气过程能量利用率提供了理论参考。对充气过程进行受力分析计算和充气量计算,结果表明利用重力作为充气动力后,充气过程变得省力,且能输出较高的气压,同时减少充气次数,因此该打气装置具有较高的实用性。
[1] 李金亮.一种新型充气装置扩力增效机构的设计[J].装备机械,2014(3):68-71.
[2] 王超,司慧.车锁式打气筒设计[J].林业机械与木工设备,2012, 40(6):38-40.
[3] 高英武,高午,辛继红,等.便携式高压打气筒的研制[J].农机化研究,2002(4):132-137.
[4] 哈尔滨工业大学理论力学教研室.理论力学[M].7版.北京:高等教育出版社,2009:136-189.
[5] 蔡自兴,谢斌.机器人学[M].3版.北京:清华大学出版社,2015: 19-49.
[6] 吴上生,陆振威.基于人车连杆模型的自行车骑行状态分析[J].华南理工大学学报:自然科学版,2016,44(2):46-52,59.
Design and Analysis of a New Inflating Device
Luo Qiao1Peng Pandao2Wu Shangsheng2
(1.Guangdong Institute of Automation Guangdong Key Laboratory of Modern Control Technology, Guangdong Public Laboratory of Modern Control & Optical, Mechanical, Electronic Technology 2.School of Mechanical and Automotive Engineering, South China University of Technology)
Based on the existing inflating devices, a new pedals inflating device is designed, the device is composed of a base frame, inflator body, crank and double arm swing lever. The inflating process is realized through the feet up and down. A planar five link kinematic model is established, the change relationship between the posture angle of the joint and the crank angle is obtained by using geometric solution of inverse kinematics in the inflation process of the highest energy efficiency. The Matlab draws the curve of the dynamic change of the joint posture angle,which provide a theoretical basis for improving the energy utilization of this inflating device. Finally, the force analysis and the calculation of the inflation rate show that this device can save power and has a few inflation numbers.
Feet Treading Drive; Double Arm Swing Lever; Kinematic Model; Inflating Device
罗俏,男,1978年生,大学本科,工程师。主要研究方向:电气工程与自动化技术应用。E-mail: q.luo@gia.ac.cn
