基于机器视觉的瓶盖封装检测系统*
2016-10-29王宇吴智恒陈启愉莫爵贤童季刚
王宇吴智恒陈启愉莫爵贤童季刚
(1.昆明理工大学机电工程学院 2.广东省智能制造研究所)
基于机器视觉的瓶盖封装检测系统*
王宇1,2吴智恒2陈启愉2莫爵贤2童季刚2
(1.昆明理工大学机电工程学院 2.广东省智能制造研究所)
针对目前瓶盖封装人工检测效率低、不稳定等问题,设计基于机器视觉的瓶盖封装检测系统。采用多传感器融合技术,通过相机对瓶盖封装产品进行图像采集;采用VS2010配合OpenCV库对图像进行数学形态学的分析处理,并将结果反馈到控制端,剔除不合格产品。与人工检测试验对比发现:该系统可对瓶盖封装产品进行高效率、高合格率的检测,满足瓶盖产品封装检测生产线自动化的要求。
机器视觉;多传感器;瓶盖封装;检测系统
0 引言
随着各类瓶装产品消费量的迅速增长、瓶装产品包装检测行业的迅速发展和食品质量检测标准的不断提高,瓶装产品的质量越来越受到人们的重视[1]。瓶盖的质量检测是瓶装产品质量检测的重要环节,传统的检测方法,主要靠人工裸眼完成。由于人为干预会带来产品卫生问题,生产效率低,易出现漏检、误检等问题,且人工检测无法适应当前瓶盖的生产速度(每秒10个以上)[2]。机器视觉经过几十年的发展,已广泛应用于机器人视觉、航空测绘、反求工程、医学成像和工业检测等领域[3-4]。同时机器视觉系统具有结构简单、便于移动、数据采集迅速等优点,所需要的视觉传感器模块也相对简单[5]。采用基于机器视觉的自动检测系统可提高生产效率,保证产品质量,节约人工资源。
本文设计的基于机器视觉的瓶盖封装检测系统,通过多传感器的融合技术对瓶盖图像进行采集分析,根据处理结果自动剔除有缺陷的瓶盖产品,同时可实现不同规格尺寸的瓶装产品瓶盖检测,实现瓶盖检测的自动化。
1 检测系统结构
1.1 检测系统架构
基于机器视觉的瓶盖封装检测系统架构如图1所示,由多传感器模块、传送带装置、剔除装置和视觉系统4部分组成。多传感器模块传输数字信号到控制端,传送带根据系统处理速度可调节传送速度,剔除装置实时剔除不合格产品。
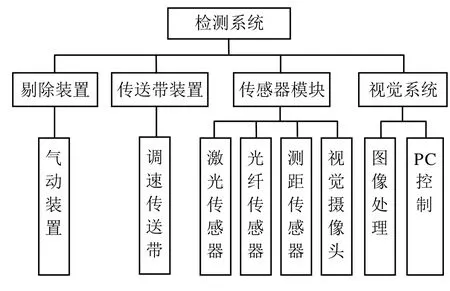
图1 基于机器视觉的瓶盖封装检测系统架构
基于机器视觉的瓶盖封装检测系统整体结构如图2所示,由传送带、传感器、瓶盖触发板、调节架、剔除装置和视觉系统组成。
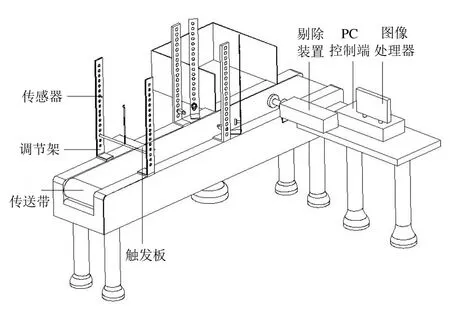
图2 检测系统整体结构
1.2 多传感器融合
在瓶盖触发板传感器被触发的同时,PC控制端接收到触发板传感器、CCD相机、激光传感器与测距传感器传输的数字信号,经过对传感器数字信号的分析,对采集的图像信息进行处理,不合格产品直接被剔除装置剔除掉。多传感器融合不仅保证了系统检测的准确性,并且使检测更加智能化,实现瓶盖封装检测的自动化、智能化。各传感器的选型与参数如表1所示。
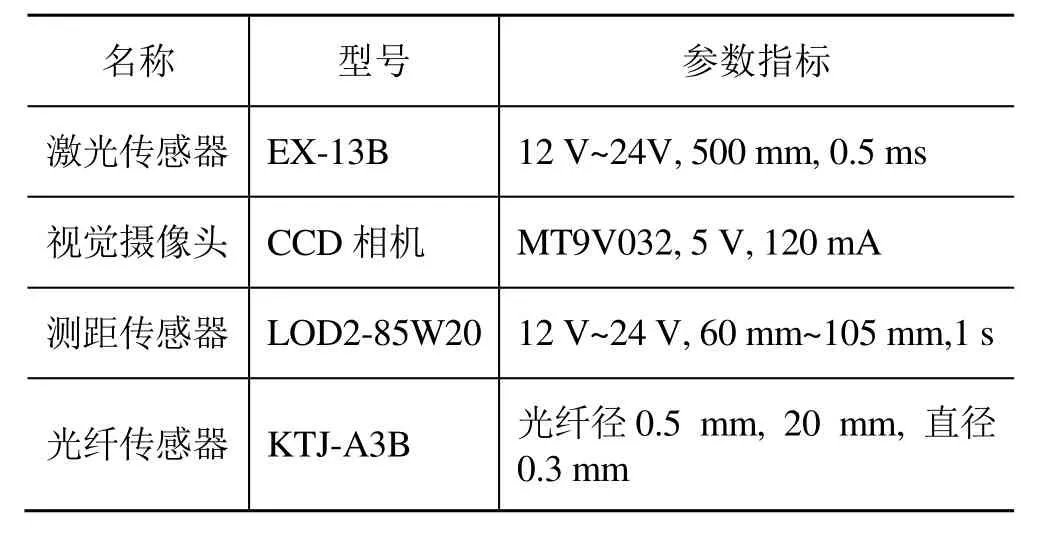
表1 传感器硬件选型与参数
1.3 视觉系统
通过CCD相机采集到的图像经过数字信号传输到控制端,采用VS2010编程并结合图像缺陷,选择OpenCV函数库的不同算子对图像进行处理。结合瓶盖缺陷检测,常用的检测算子主要有Prewitt算子、Canny算子、Sobel算子、Krisch算子、Roberts算子、LOG算子,其中LOG算子边缘分割效果最显著;Canny算子边缘分割效果次之;Sobel边缘检测算子、Prewitt边缘算子、Roberts边缘算子分割效果相差不大,都各有不足之处且稍微存在双边缘现象;Krisch算子双边缘现象最明显。所以在系统检测瓶盖缺陷时,可选择其中一种或几种算子,确保检测质量。视觉系统可分为传感器部分、控制端、CCD相机,结构如图3所示。为确保检测系统较高的准确率,瓶盖触发板传感器被触发后,不合格产品直接被剔除装置剔除。
2 检测系统工作流程
视觉系统中,相机不间断地获取产品图像信息并传输到控制端,确保了检测的合格率及系统的稳定性;红外测距传感器实时记录传输数字信号到控制端,并控制剔除装置自动剔除不合格品,保证了系统的高度自动化。系统工作流程如图4所示。

图3 视觉系统结构图
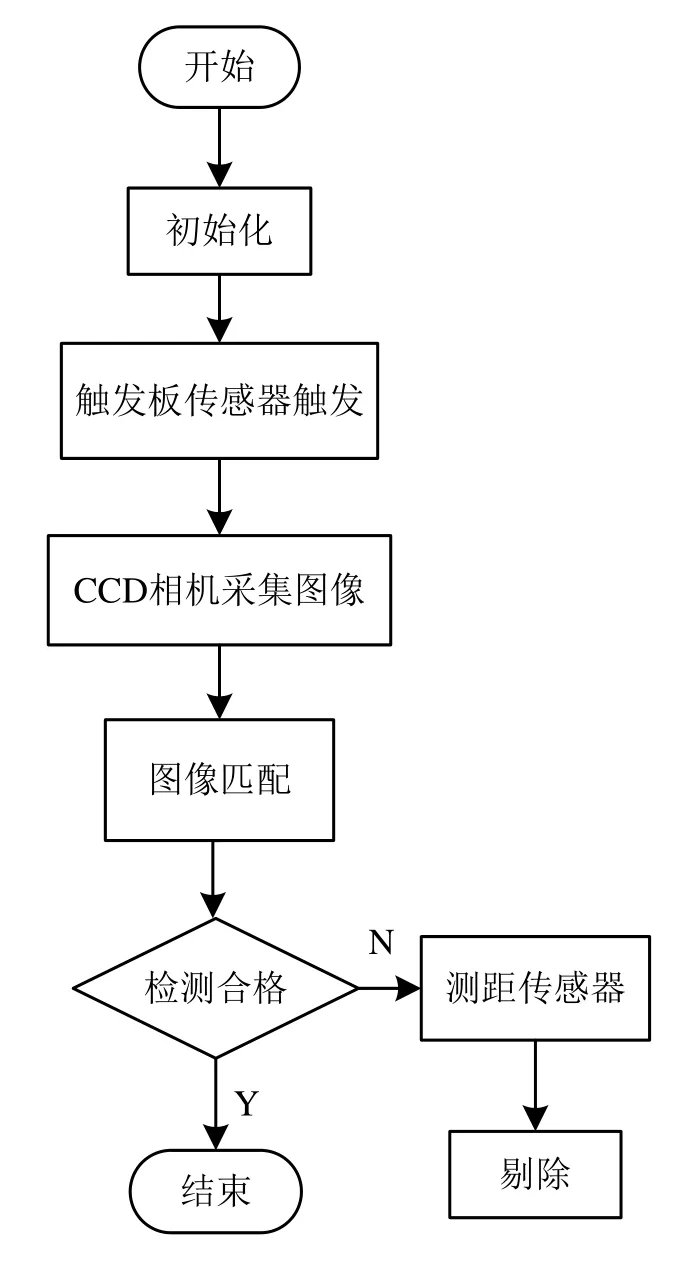
图4 检测系统整体结构流程图
瓶盖触发板、相机和光源都可以根据不同瓶装产品的规格尺寸进行调节,使系统可以检测多种不同类型的瓶装产品,通用性强。根据生产线上待检产品的数量,可调节相机采集图像的时间间隔,选择合适的传送带速度,提高检测效率。
3 试验与分析
基于机器视觉的瓶盖封装检测系统样机如图5所示,触发板传感器安装在触发板调节架上、CCD相机安装在相机调节架上。
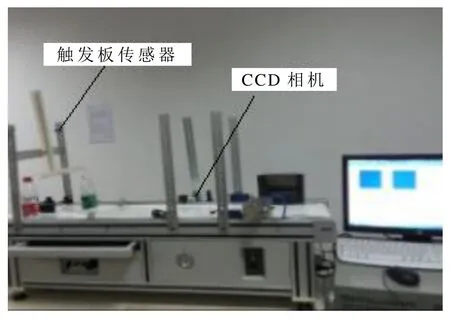
图5 基于机器视觉的瓶盖封装检测系统样机
该检测系统能大大提高生产效率与检测质量,也避免了人工因长期检测疲劳带来的误检等情况。系统检测界面如图6所示,可以根据缺陷种类选择不同的OpenCV算子。系统与人工同时检测相同产品数量、不同产品高度的对比试验数据如表2所示。

图6 系统界面图
从试验结果可看出,本文设计的检测系统在检测相同高度和数量的瓶装产品时,所用时间明显比人工检测少;系统检测1000个合格产品、多种规格尺寸的瓶装产品误检率<1%,而人工误检率在2%左右;系统检测100个不合格产品、多种规格尺寸的瓶装产品误检率≤4%,而人工误检率在20%左右,且长时间检测,容易疲劳,影响检测率。
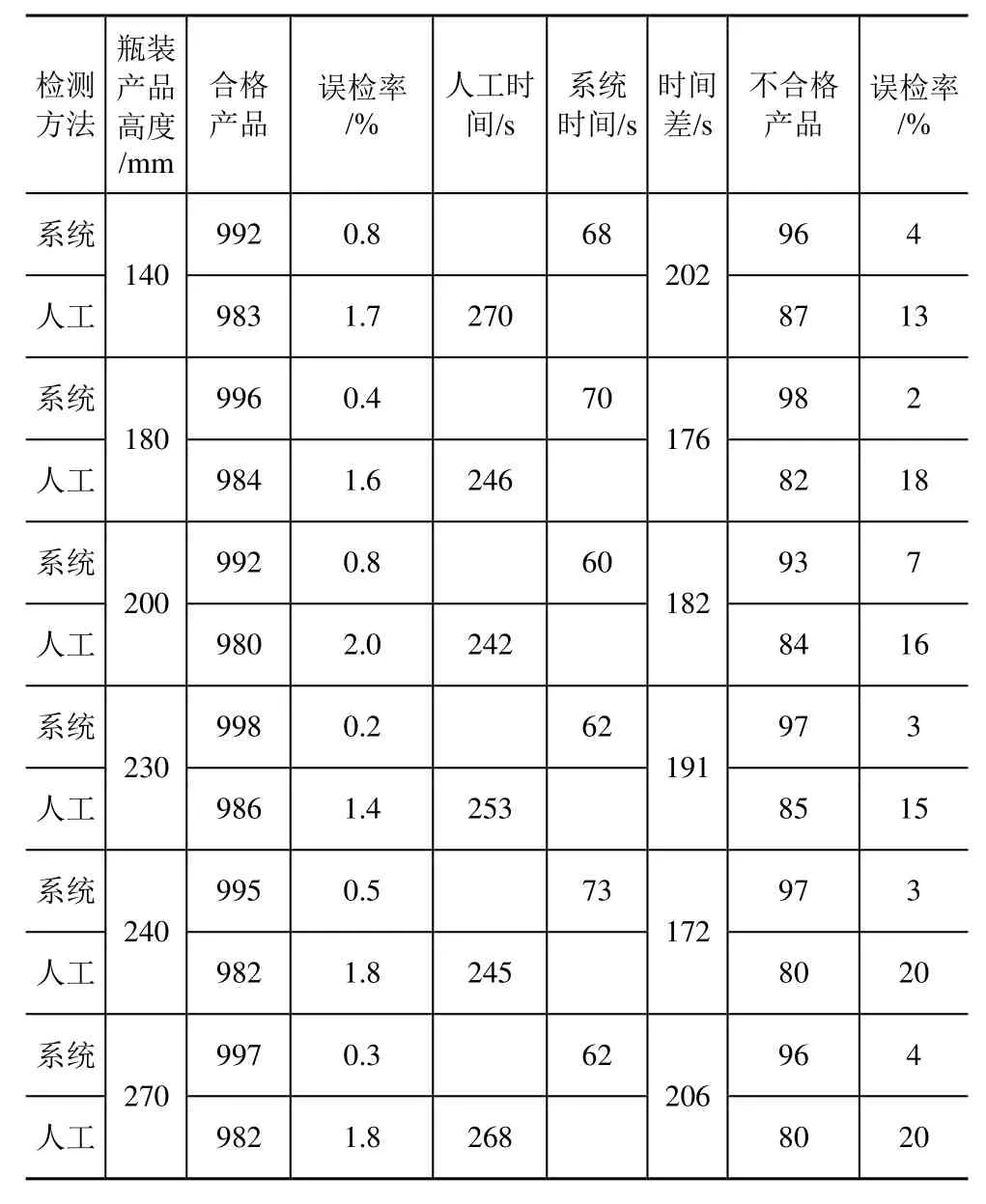
表2 检测试验数据
4 结语
本文设计的基于机器视觉的瓶盖封装检测系统可对不同规格尺寸的瓶装产品的瓶盖进行检测。在多传感器融合下,视觉系统获取并处理得到的瓶装产品图像信息,检测出不合格产品并剔除。试验结果表明:该检测系统可对瓶装产品进行高效率、高合格率的检测,满足瓶装产品封装检测生产线自动化的要求。
[1] 张树君,陈大千,辛莹莹,等.基于图像的PET瓶瓶盖和液位的检测设备[J].轻工机械,2013,31(2):71-73.
[2] 黄伟基,谢云.基于ARM与DSP的PET瓶盖缺陷在线检测系统的设计[J].机床与液压,2013,41(7):104-107.
[3] 隋婧,金伟其.双目立体视觉技术的实现及其进展[J].电子技术应用,2004(10):4-6,12.[4] 张可,张棉好.双目立体视觉系统的非线性模型建立[J].传感器与微系统,2006,25(10):31-33,37.
[5] 周敏,费敏锐,周文举,等.基于机器视觉的皇冠瓶盖外围刮擦检测方法[J].仪表技术,2013,3(11):38-40.
Design of Bottle Cap Encapsulation Testing Based on Machine Vision
Wang Yu1,2Wu Zhiheng2Chen Qiyu2Mo Juexian2Tong Jigang2
(1.Faculty of Mechanical and Electrical Engineering Kmust University,Kunming University of Science and Technology 2. Guangdong Institute of Intelligent Manufacturing)
In order to solve the current cap of encapsulation testing relies on artificial problems such as low efficiency, low quality and instability, put forward a kind of based on machine vision through multiple sensor fusion, camera to image acquisition, the unqualified bottle packaging products through visual system image analysis processing, and will feedback the result in the control side, after rejecting mechanism to eliminate the unqualified products boxes. The system is successful and artificial test comparison, and can effective to high efficiency, high qualified rate of the cap packaging products testing, reached the bottle cap products packaging testing production line automation requirements, have certain application value.
Machine Vision; Multi-Sensor; Cap Encapsulation; Testing System
王宇,男,1989生,在读硕士研究生,主要研究方向:机器视觉、模式识别。E-mail: 136411389@qq.com
广东省科技计划资助项目(2015B070701025,2013B061800058,2015B010918001)
