MEMS惯导在旋翼飞行器中导航性能的实验分析*
2016-10-26牛小骥张提升刘经南
蔡 磊,牛小骥,张提升,程 政,刘经南
(武汉大学卫星导航定位技术研究中心,武汉430079)
MEMS惯导在旋翼飞行器中导航性能的实验分析*
蔡磊,牛小骥*,张提升,程政,刘经南
(武汉大学卫星导航定位技术研究中心,武汉430079)
GNSS/MEMS INS组合导航系统是四旋翼飞行器获取位置、速度、姿态的一种重要手段。由于电机转动、气流等因素的影响,旋翼飞行器会出现小幅度的高频抖动,INS机械编排更新率若要满足这一高频运动,将带来沉重的计算负担。在实测分析飞行器抖动特性的基础上,对比了IMU原始采样率不足和仅INS机械编排更新率不足对惯导性能的影响,并分析了四旋翼飞行器所需INS机械编排更新率的底限。实验表明,飞行器高频抖动条件下,由IMU原始采样过低导致的采样混叠会对MEMS惯导性能产生严重影响;但如果原始IMU采样率足够高,而通过求平均(或累加)降采样方法适当地降低机械编排更新率(本文实验条件下可降至20 Hz),则不会明显影响导航精度。本文工作为MEMS惯导用于旋翼飞行器导航提供了参考。
旋翼飞行器;MEMS惯导;导航精度;IMU采样率;INS机械编排更新率;降采样
EEACC:7230;7320Edoi:10.3969/j.issn.1004-1699.2016.05.015
旋翼飞机具有结构简单、制造成本低、利于小型化无人化等特点,使其被广泛地应用于军事、警用、民用等领域,如移动目标跟踪、植被监测、救援搜索、影视航拍等[1]。而在实际应用中,旋翼飞行器的位置、速度和姿态通常是基本的必备信息。目前获取该信息的方式主要包括卫星导航(GNSS)、惯性导航、地形辅助及各种组合导航,其中GNSS/MEMS INS组合导航是非常重要的一种技术手段。
由于旋翼飞行器动力源自螺旋浆高速旋转产生的升力,而受气流等因素的影响,某一特定旋转频率产生升力并非恒定值,因此往往导致机身出现小幅度的高频抖动[2-3]。从飞行控制的方面评估和降低这种抖动的影响已有研究[4-5],文献[4]通过实践表明抖动过大会导致飞行器无法平稳飞行,并采用减震(物理层面滤波)和加权移动平均(信号层面滤波)方式降低其影响,文献[5]推导了减震模型的数学表达式,为减震材料的选取提供了理论指导,然而从惯性导航性能方面去评估飞行器抖动影响的研究甚少。
本文首先将基于飞行实验数据分析旋翼飞行器的振动特性,接着介绍惯导性能评估方法,然后比较飞行器振动条件下IMU原始采样不足、IMU原始采样充足但INS机械编排更新率不足两种情况对惯导性能的影响,并通过统计评估手段量化飞行器在不同动态条件下INS机械编排更新率对MEMS惯导性能的影响,最后给出结论。
1 旋翼飞行器振动特性
一般情况下,由于受到旋翼的动不平衡以及非定常气流环境的影响,旋翼产生的升力是在基值的基础上附加一系列频率特性和旋翼转速有关的高频分量[2]。下面本文将从实验测试角度研究大疆精灵系列四旋翼飞行器升力的波动特性。
飞行器悬停条件下,采集一组MTi-G-700[6]组合导航系统2 kHz数据率的陀螺输出。截取8.192 s(16384采样点)的数据,进行傅立叶变换,得到其功率谱,如图1。频谱图表明,陀螺三个轴向的输出存在明显较为规律的振动,振动频率集中在180 Hz左右,与其对应的还存在360 Hz和540 Hz附近的二阶峰和三阶峰。180 Hz与本文采用飞行器螺旋桨额定转速基本一致,由此可以判定,180 Hz的振动与螺旋桨转速相关。
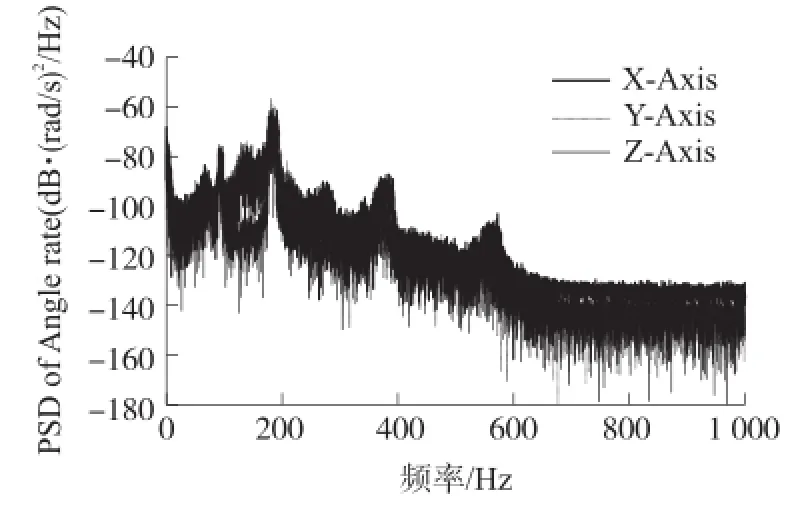
图1 旋翼飞行器悬停条件下角速率功率谱密度
2 惯导性能评估方法
在惯性导航算法中速度和姿态的双子样算法被普遍采用,旋翼机载体由于存在高频振动而格外需要双子样这种多子样解算。因此,本文采用双子样机械编排算法[7-8]。
GNSS/INS组合导航系统的实验测试是评估惯导性能的主要方法,特别是当GNSS信号出现短期失效时,惯导机械编排推算的位置误差会出现明显的漂移,而漂移发散的快慢与惯导性能成正相关。实践中,往往通过人为仿真多个GNSS信号失效时段,统计GNSS中断期间INS机械编排推算位置误差的漂移,以此来评估惯导性能[9]。本文GNSS/INS组合导航采用松组合方式[7,10]。
在评估MEMS惯导系统时,通常选择一个较高精度的GNSS/INS系统作为参考。由于四旋翼飞行器承重有限,无法负担高精度参考系统的重量;但其测试环境开阔,因此我们选择单频GPS载波相位差分结果作为参考真值。
在双子样算法中,在连续两个IMU采样间隔内角速度和比力都被假设是线性变化的[7],也即在采样间隔时间内,线性拟合IMU角速度和比力越逼近真实角速度和比力,那么双子样惯导算法的精度就越好。理论上讲INS机械编排更新率越高,采样时间间隔尺寸内信号越接近线性变化。实际应用中由于处理器资源有限,折衷选择一个兼顾惯导解算精度损失小和降低计算量的INS机械编排更新率具有重要的工程价值。
考虑到IMU原始采样率下INS机械编排更新率过高导致的计算负担,本文将分别分析对比降低IMU原始采样率以降低INS机械编排更新率,以及在原始采样充足前提下通过降采样降低INS机械编排更新率,这两者对MEMS惯导性能的影响。为此,下文将采用两种降采样方式:(a)直接抽取降采样,是以丢弃非采样时刻信息的方式进行,比如采样率从nfs降到fs,即每隔n-1个nfs采样点取一个作为fs采样点,根据频域卷积定理[11],该过程会使nfs信号中fs/2~nfs/2成分以能量无衰减的形式混叠至fs信号的0~fs/2中;(b)求平均降采样,是以不丢弃非采样时刻信息的方式进行,比如采样率从nfs降到fs,即在nfs信号中对连续n个采样点求平均作为一个fs采样点,该过程等价于先对nfs信号做n点滑动平均滤波,再以方式(a)进行下抽样,由于滑动平均滤波器具有低通特性[12],nfs信号中fs/2~nfs/2成分的能量会出现较大衰减,而0~fs/2成分衰减较小。因此,方式(b)中频谱混叠的影响会明显小于方式(a)。本文以方式(a)来模拟原始采样不足而导致INS机械编排更新率不足,以方式(b)来实现原始采样充足提前下以求平均方式导致INS机械编排更新率不足。
3 实验结果和分析
飞行实验在武汉大学操场开展,采用天宝R9接收机作为基准站,大疆四旋翼飞行器上搭载XSens公司的MEMS组合导航模块MTi-G-700和ublox公司的GNSS接收机LEA-6T。其中,MTi-G-700提供原始采样为10 kHz求平均降采样后带GPS时标的400Hz更新率的IMU数据,LEA-6T提供GNSS原始观测信息。R9基站信息与LEA-6T进行载波相位差分定位解算,作为GNSS/MEMS IMU组合导航的GNSS观测信息和评估GNSS中断时MEMS惯导漂移的参考真值。
3.1降采样对MEMS惯导性能的影响
为比较两种降采样对惯导性能的影响,开展如下实验:(a)取一组由2 kHz求平均降采样至400 Hz的惯导数据,再以同样的方式降低至200 Hz,与1 Hz的GPS载波相位差分做松组合;(b)对(a)中400 Hz数据进行直接抽取降采样获得200 Hz惯导数据,其他条件和处理方式与a相同。截取一段a和b东向定位与GPS载波相位差分定位作比较,如图2所示。可以看出,旋翼飞行器振动条件下,相比于a的导航结果,b的结果出现了严重问题,完全失去导航能力。结果a和结果b的巨大差异源于飞行器180 Hz左右的升力波振动,根据奈奎斯特采样定理,a和b都出现了欠采样,不同的是a对原始数据中180 Hz的有害振动信息进行了一定程度的抑制(或者说是算法层面的阻尼隔振)。该结果表明,小幅度高频抖动条件下,若原始采样率足够,通过对原始信息求平均降采样来降低INS机械编排更新率,对MEMS惯导性能的影响远小于由原始采样不足而导致的采样混叠、信息丢失的影响。因此,IMU原始采样率必须足够高以满足采样定理;如需对原始数据降采样以降低惯导算法的更新率时应采取求平均降采样法(或累加法)。在这一结论的基础上,下文将评估INS机械编排更新率对惯导性能影响。
3.2INS机械编排更新率对惯导性能的影响
根据2.2节介绍的惯导系统性能评估方法,本文将对每组GNSS/MEMS INS测试数据设置多个GNSS失效时段,时段选择以MEMS IMU各项误差已被松组合卡尔曼滤波器估计为宜,并且相邻时段之间有足够的时间让组合导航系统恢复。下文首先将选取一组典型数据,对比40 Hz和10 Hz/INS机械编排更新率下MEMS惯导位置误差漂移曲线,其后将选择两种不同动态场景,每种测试两组,分别统计不同场景不同INS机械编排更新率下MEMS惯导位置误差漂移。
3.2.1两种INS机械编排更新率下MEMS惯导的误差漂移
选择一组动态丰富场景数据,分别以求平均降采样方式获取其40 Hz和10 Hz数据,在相同时段设置GNSS中断,仿真GNSS中断每段30 s,相邻两个中断间隔60 s恢复时间。松组合结果与单频载波相位差分定位结果做差以求取误差,所得定位误差曲线如图3和图4所示。该结果表明,相比于40 Hz机械编排更新率,10 Hz更新率导致MEMS惯导性能急剧恶化。
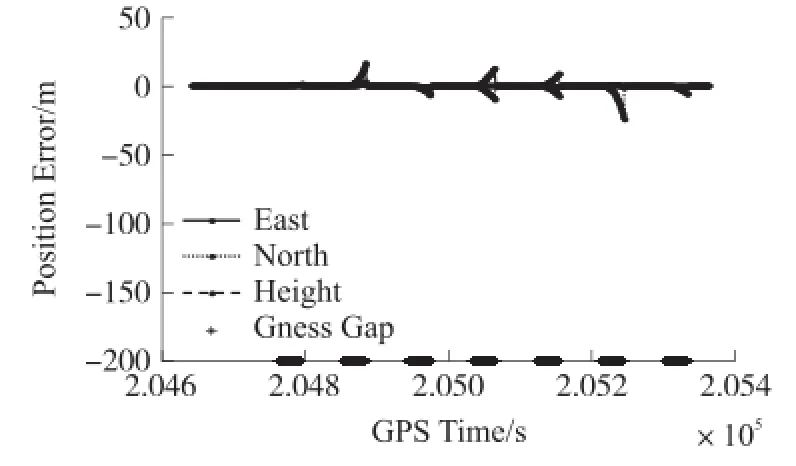
图3 40Hz机械编排更新率下MEMS惯导误差漂移
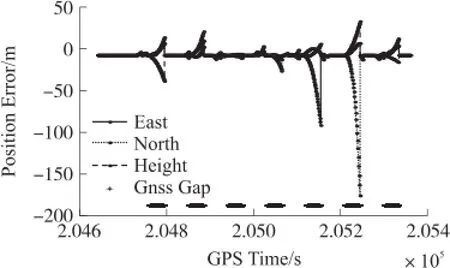
图4 10Hz机械编排更新率下MEMS惯导误差漂移
3.2.2不同动态场景下INS机械编排更新率对MEMS惯导性能的影响
(a)飞行器较平稳飞行场景:仿真GNSS中断每段30 s,恢复时间60 s,统计频率包括400 Hz、200 Hz、100 Hz、50 Hz、40 Hz、25 Hz、20 Hz、10 Hz、5 Hz,每个频点30个统计样本,惯导误差漂移RMS统计结果如图5所示。

图5 平稳场景MEMS位置误差漂移
(b)飞行器动态丰富场景:动态包括左右不停摇摆、急停急加速等,图2中“GPS RTK Result”所示为其中一段数据东向轨迹。其他条件与(a)相同,统计结果如图6所示。
(a)和(b)场景30 s MEMS惯导位置漂移统计结果如表1所示,结果显示:①INS机械编排更新率从400 Hz降至40 Hz,两种飞行场景的30 s秒惯导位置误差漂移值并未明显增大;②10 Hz/ INS机械编排更新率下,两种场景的MEMS惯导的性能出现明显恶化,但动态越丰富性能恶化越严重。
实验表明,在惯导原始采样率足够的情形下(针对飞行器抖动频率而言),采用求平均降采样方式适当降低INS机械编排更新率,不会导致MEMS惯导导航性能的明显下降,此时导航性能不会受到飞行器高频抖动影响。但这种降采样也是有下限的,在本文四旋翼飞行器的配置下最多可降低机械编排更新率至20 Hz~25 Hz。
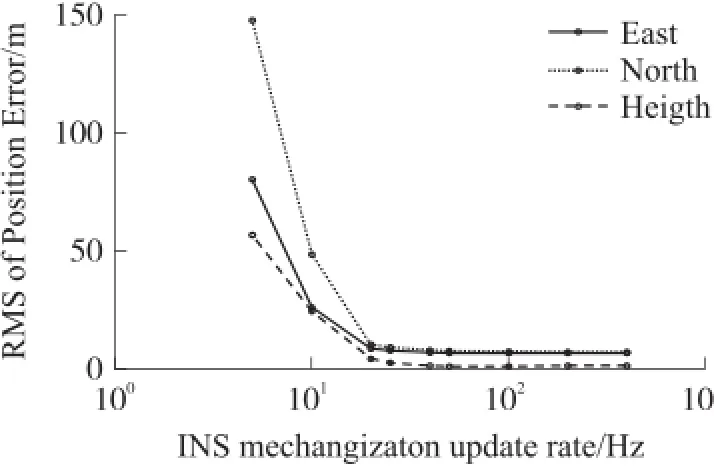
图6 丰富动态场景MEMS位置误差漂移
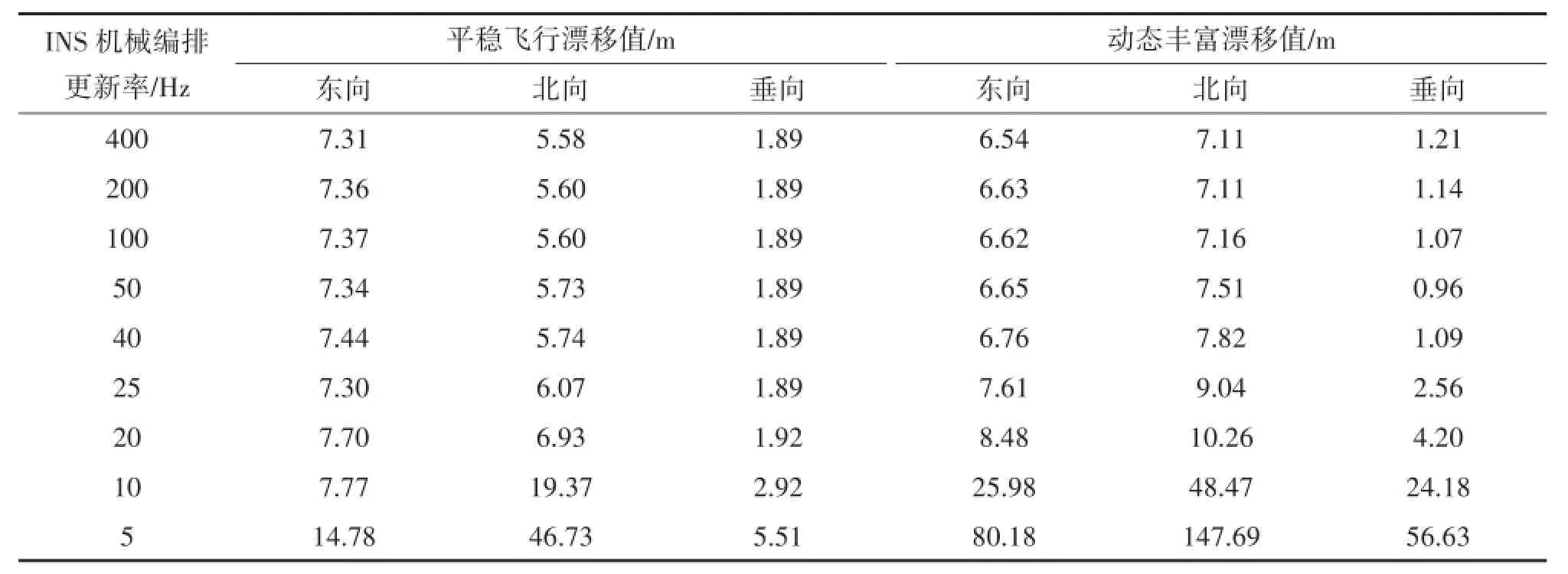
表1 惯导位置误差漂移统计
4 结论
本文依据实测分析得出的旋翼飞行器的振动频谱特性,阐明了直接抽取降采样与求平均降采样的本质区别,对比分析了飞行器振动条件下IMU原始采样不足、IMU原始采样充足但INS机械编排更新率不足两种情况对惯导性能的影响,实验结果表明,后者对MEMS惯导性能的影响远小于前者,因此IMU原始采样率必须保证足够高,而INS惯导算法更新率则可以适当降低。最后从组合导航性能统计结果中量化分析了不同INS机械编排更新率对MEMS惯导性能的影响,统计结果表明,在惯导原始信息采样率足够的条件下,通过求平均的降采样方式,可降低机械编排更新率至20 Hz~25 Hz,此时MEMS导航精度不会受旋翼飞行器的高频抖动影响而明显下降。
[1]方璇,钟伯成.四旋翼飞行器的研究与应用[J].上海工程技术大学学报,2015,29(2):113-118.
[2]赵常均,宫勋,白越,等.四旋翼飞行器中升力波动的干扰与抑制[J].光学精密工程,2014,22(9):2431-2437.
[3]齐书浩,刘素娟,张文明,等.低雷诺数下微型四旋翼飞行器气动和振动特性分析[J].噪声与振动控制,2013,33(5):53-57.
[4]庞庆霈,黄文浩.四旋翼飞行器设计与稳定控制研究[D].合肥:中国科学技术大学,2011.
[5]张洪涛.四旋翼微型飞行器位姿及控制策略的研究[D].哈尔滨:哈尔滨工业大学,2014.
[6]MTi User Manual[EB/OL].[2015-02-27].https://www.xsens. com/download/Userm-anual/MTi_Usermanual.Pdf.
[7]Savage P G.Strapdown Inertial Navigation Integration AlgorithmDesign Part 2:Velocity and Position Algorithms[J].Journal of Guidance Control&Dynamics,1998,21(2):208-221.
[8]Shin E H.Estimation Techniques For Low-Cost Inertial Navigation[J].UCGE Report,2005,20219.
[9]Niu X,Goodall C,Nassar S,et al.An Efficient Method For Evaluat⁃ing the Performance of MEMS IMUs[C]//IEEE/ION Position Loca⁃tion and Navigation Symposium.San Diego,CA,,USA:IEEE, 2006.
[10]王延东,贾宏光.组合导航系统滤波器截断误差抑制方法[J].传感技术学报,2014,27(5):616-621.
[11]郑君里,杨为理,应启珩.信号与系统[M].高等敎育出版社,2000.
[12]文常保,高丽红,方吉善,等.基于改进型限幅平均滤波法的高精度称重系统研究[J].传感技术学报,2014,27(5):649-653.

蔡磊(1991-),男,汉,湖北仙桃,硕士研究生,主要研究方向为GNSS接收机及组合导航,2010301200071@whu.edu.cn;

牛小骥(1973-),男,陕西西安,教授,博士,主要研究方向为惯性测量和gnss/ ins组合导航,xjniu@whu.edu.cn。
The Experiment Alanalysis of The Navigation Performance of MEMS INS on Rotor Aircrafts*
CAI Lei,NIU Xiaoji*,ZHANG Tisheng,CHENG Zheng,LIU Jingnan
(GNSS Research Center,Wuhan University,129 Luoyu Road,Wuhan 430079,China)
GNSS/MEMS INS integrated navigation system is an important way to obtain the position,velocity and atti⁃tude of four rotor aircrafts.Because of the influence of the factors such as motor rotation and airflow turbulence,there is small magnitude,high frequency vibrations on the body of rotor aircrafts.This would lead to heavy calculation bur⁃den if the INS mechanization update rate fits the requirement of sensing the high frequency vibration.Based on the analysis to the vibration characteristics from experimental data,the difference of two cases is compared in terms of the influences on inertial navigation.One is that the original sampling rate of IMU data is insufficient;the other is that the original sampling rate of IMU data is sufficient but be down-sampled intentionally to a low rate by averaging(or integral)so as to reduce the INS mechanization rate.The result of experiment shows that on the condition of the rotor aircraft vibration,insufficient original sample rate of IMU will cause sampling aliasing and crash INS mechani⁃zation and GNSS/INS integration.But the proper reductionof the INS mechanization update rate as low as 20 Hz will not cause any noticeable degradation of the navigation accuracy under the test condition in this paper.The analysis and results in this paper provide reference parameters in applying MEMS INS to rotor aircraft navigation.
rotor aircrafts navigation;MEMS INS;navigation accuracy;IMU sampling rate;INS mechanizationup⁃date rate;reduction
TB22
A
1004-1699(2016)05-0711-05
项目来源:中央高校基本科研业务经费专项资金项目(2042014kf0258);国家自然科学基金项目(41404029);中国博士后基金项目(2014M560628)
2015-11-24修改日期:2016-01-12
