基于机械臂控制系统的数据采集模块研究
2016-10-22黄晓刚黄品剑汤剑周天龙王海伦
黄晓刚,黄品剑,汤剑,周天龙,王海伦
(1.衢州学院电气与信息工程学院,浙江衢州324000;2.上海海事大学物流工程学院,上海201306;3.浙江神州机器人科技有限公司浙江衢州324000;4.浙江省计量科学研究院浙江杭州310018)
基于机械臂控制系统的数据采集模块研究
黄晓刚1,2,黄品剑3,汤剑1,周天龙4,王海伦1
(1.衢州学院电气与信息工程学院,浙江衢州324000;2.上海海事大学物流工程学院,上海201306;3.浙江神州机器人科技有限公司浙江衢州324000;4.浙江省计量科学研究院浙江杭州310018)
为了提高机械臂控制系统的性能,使其在运行中动作可控、速度稳定、位置精确,本文针对数据采集模块进行研究。本数据采集模块以TI公司的DSP(TMS320F28016)为控制芯片,使用RS232和CAN总线双通信总线实现数据采集和系统控制。采集到的信号采用递推平均滤波法,滤波后以数字信号的方式送给控制系统。实验结果表明,满足机械臂动作要求,得到了所需要的信号。在实际应用中做到了动作协调、速度平滑稳定以及位置精确,整体上大大提高了系统的性能。
机械臂;DSP;RS232;数据采集
机械手臂是自动化设备不可缺少的重要组成部分,机械手臂的高效安全工作对生产和生活都有着非常重要的意义。目前,随着机械设备高速化和重载化的发展趋势,对机械手臂的工作平稳性能和安全性能提出了越来越高的要求[1]。数据采集是机械臂控制系统的关键部分,只有采集到准确的信号,才有可能达到系统的性能要求。采集的信号往往是模拟信号,由于模拟信号传输失真大、保密性能差,数据处理适应性差,所以很多时候需要将模拟信号转换为数字信号,然后传给计算机进行数据的处理、记录、显示以及控制相应的设备[2]。文中就是要制作一个基于TMS320F28016的数据采集模块,实现模拟信号的采集,并以数字信号的方式送给控制系统。
1 系统整体设计
数据采集模块主要由AD转换器;PWM脉宽调制模块;QEP正交编码模块;SPI异步通信模块;EEPROM存储模块;数据处理、传输等模块组成。本设计使用了一片TMS320F28016高性能DSP,外加部分扩展实现,实现了系统的高集成、小体积、低功耗、低成本、高可靠。

图1 系统总体结构框图
2 关键技术的硬件设计
2.1F28016DSP控制系统简介
使用TMS320F28016构成的数据采集模块控制系统,几乎不用再添加其他外围电路,是一种良好的一片式解决方案。相比现在广泛使用的F2407,F28016新一代的内核具有更高的工作频率(60M),高效的性能可以完成各种复杂的控制算法,且价格相比高端的2812又极具优势[3]。TMS320F28016势必将成为新一代控制的首选芯片之一。
2.2电源电路设计
F28016是双电源供电:内核使用1.8V低电压能有效降低功耗,外部I/O口为3.3V能与大多数电路匹配,并且需要考虑上电复位。在这里采用的是REG1117-3.3与REG1117-1.8最大工作电流1 A完全满足F28016的电源要求。复位采用X5043芯片,自带电压保护并内置512字节EEPROM储存器,通过SPI方式与DSP通信。X5043满足F28016电源上电复位需求,并解决了数据储存问题。如图2所示。

图2 复位与EEPROM储存原理图
2.3数字控制量输出驱动电路
图3是DSP数字控制量输出驱动电路的一个子单元。为了防止被控设备对DSP的干扰,电路中加入了光耦隔离器TLP521,R1为光耦输入二极管的限流电阻。由于DSP无法提供光耦导通时需要的50 mA电流,故在光耦的输出三极管处加了一个S8050 NPN管,与光耦的输出三极管一起构成了达林顿管形式,一起驱动继电器K1。图中的D1 1N4001是继电器的续流二级管,因为继电器是感性元件。CON3是继电器的输出接口。
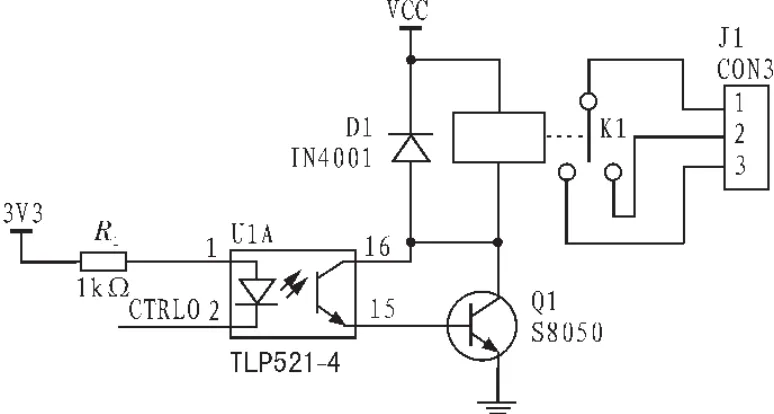
图3 数字控制量输出驱动电路原理图
3 软件设计
本程序使用C语言编写,编译器采用CCStudio3.3,该编译器是DSP程序设计的常用工具,既可用汇编,也支持C语言编译。同时具有完善的调试功能。调试工具使用JTAG调试器TI DSP EMULATOR,软件编写调试结合系统硬件。
系统软件流程图如图4所示。
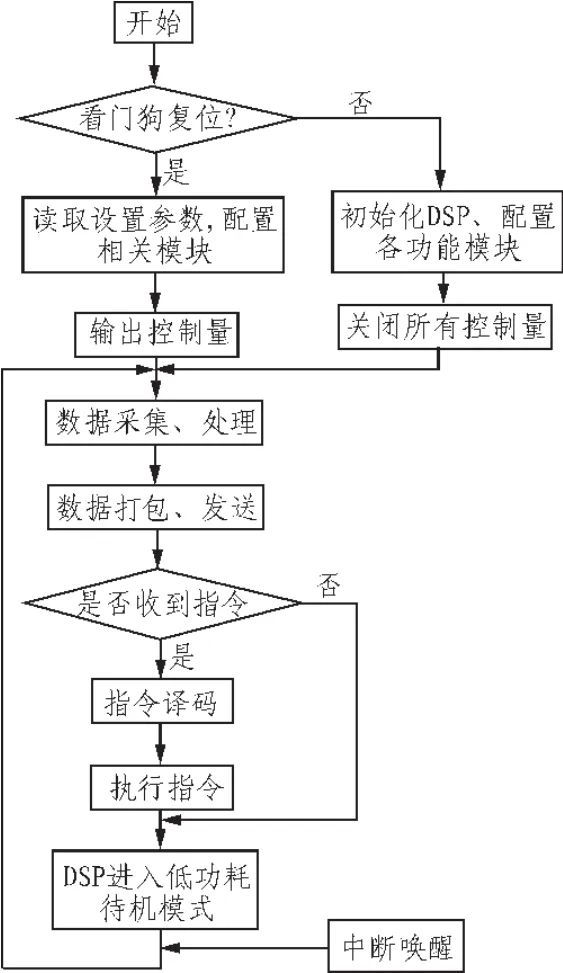
图4 系统软件流程图
4 实验结果
通过CCStudio3.3中自带的图形显示功能,可以方便的对采样得到的数据进行显示。只需要在程序中设置一个数组,将采样得到的数据存放进数组。使用Graphical Display图形显示功能,就能反映出一段时间以内的数据变化信息。
本模块的软件设计中,采用递推平均滤波法,其优点为对周期性干扰有良好的抑制作用,平滑度高。如图5为未进行滤波采集到的数据波形,图6为采样滤波后的波形。

图5 滤波前图形

图6 滤波后图形
5 结束语
该数据采集模块,经测验,能满足机械臂控制系统的性能要求。除此之外,该数据采集控制模块具有广泛的应用前景,文中所述模块在设计上充分考虑其应用上的通用化程度,并得到了理想的调试结果。该模块进行简单的配置与调整,即可在环境监测、简单闭环控制等多种对稳定性、功耗、成本有要求的场合得到应用。模块的上位机软件和配置软件仅开发了部分子模块供应用层调用,实际用户可根据具体项目需求自行开发应用程序,从而让该模块投入使用。
[1]王俊龙,张国良,敬斌,等.一种新的六自由度机械臂运动学反解方法研究[J].计算机工程与应用,2013,49(22): 266-270.
[2]周翔.基于C8051的嵌入式多功能测控模块设计[J].杭州电子科技大学学报,2007(4):37-40.
[3]张秀玲,李晓辉,徐腾,等.PID神经网络混沌优化及其在机械臂轨迹跟踪控制中的应用[J].山东科技大学学报(自然科学版),2013,32(5):84-95.
[4]Mahdi Ashabani,Ali Kashefi Kaviani,Babak Abdi.MinimizationofCommutationTorqueRippleinrushlessDCMotorswith Optimized Input Voltage Control[J].IEEE,2008:250-255.
[5]Chang-hee Won,Joong-Ho Song,and Ick Choy Commutation Torque Ripple Reduction in Brushless DC Motor Drives Using a Single DC Current Sensor[J].IEEE,2002(2):985-990.
[6]Hwang S M and D.K.Lieu Reduction of Torque Ripple in Brushless DC Motors[J].IEEE,31(6):3737-3739.
Research of data acquisition module based on mechanical arm control system
HUANG Xiao-gang1,2,HUANG Pin-jian3,TANG Jian1,ZHOU Tian-long4,WANG Hai-lun1
(1.College of Electrical and Information Engineering,Quzhou University,Quzhou 324000,China;2.Logistics and Engineering College,Shanghai Maritime University,Shanghai 201306,China;3.Zhejiang Shenzhou Robots Technology CO.LTD,Quzhou 324000,China;4.Zhejiang Province Institute of Metrology,Hangzhou 310018,China)
In order to improve the dynamic characteristics of sewing machine servo system,make it controlable,run stably and locate precisely,we research on the Data Acquisition Module based on Mechanical Arm control system.As the core of DSP(TMS320F28016)microcontroller data acquisition technology,use the RS232 and CAN pairs of communications bus to achieve the data acquisition and system control.Recursion average filtering method was used,then send digital signals to PC.The results of the experiments show that the controller has some advantages which can meet the demand of the Mechanical Arm,and also improve the dynamic performance of the whole system.
mechanical arm;DSP;RS232;data acquisition
TP273
A
1674-6236(2016)17-0145-02
2015-09-09稿件编号:201509068
衢州市科技局项目(2014Y011);上海海事大学研究生创新基金项目(2015ycx073)
黄晓刚(1986—),男,浙江东阳人,博士研究生,讲师。研究方向:智能仪器与仪器智能化。
