卫星轨道外推算法实现
2016-10-22刘成王勇勇朱淑珍余金培梁广
刘成,王勇勇,朱淑珍,余金培,梁广
(1.中国科学院上海微系统与信息技术研究所,上海200120;2.上海微小卫星工程中心上海200120)
卫星轨道外推算法实现
刘成1,2,王勇勇1,2,朱淑珍1,2,余金培2,梁广2
(1.中国科学院上海微系统与信息技术研究所,上海200120;2.上海微小卫星工程中心上海200120)
基于作用于卫星的摄动力,建立动力学模型来确定和预测人造卫星的轨道位置和速度。在J2000.0坐标系下,轨道外推采用龙格库塔(Runge-Kutta)数值积分器联合MATLAB和STK软件进行模拟仿真。根据数据分析,得出若干关于卫星定轨结论。
STK;简化动力学;数值积分器;轨道外推
全球定位系统(GPS)在低轨卫星的轨道计算上得到广泛应用。由于低轨卫星上的GPS接收机接收的时钟信号受电离层和大气影响小,信号准确度高,因此通过GPS获取的卫星轨道参数精度较高。通过GPS定位计算获取的卫星星历是一组离散的点,获取连续轨道需要进一步处理。常用的方法分为几何法和动力学法。两种方法在实际应用时都有各自的优缺点。几何法利用卡尔曼滤波、拉格朗日插值法、切比雪夫多项式等方法拟合轨道,常用多组星历参数拟合出卫星的轨道函数表达式再计算出卫星坐标[1-7]。动力学法通过考虑卫星的各种摄动模型,建立相应的轨道方程,定轨精度很高,但它计算的复杂度较大。
在对GPS卫星进行轨道改进需要外推轨道,轨道外推的精度越高,定轨的精度越高[8-9]。
1 简化动力学模型
人造卫星在围绕地球的运动过程中受到多种作用力的影响。总的来说,这些作用力可以分为两大类:一类为保守力,另一类是非保守力,也称发散力。保守力包括地球引力、日、月、行星对卫星的引力以及地球的潮汐现象导致的引力场变化等。对于保守力系统可以使用“位函数”来描述这些作用力。发散力包括大气阻力、地球红外辐射以及卫星姿态控制的动力等。对于发散力则不存在“位函数”,只能直接使用这些力的表达式。在动力学定轨中,大部分保守力能够用比较精确的数学模型表示,而发散力具有较强的随机型,很难用数学模型来描述。为了补偿无法模型化或错误模型的微小摄动力的影响,常引入经验力模型。
除了主要的地球中心引力以外,其余的作用力都相对较小,可以把实际的卫星运动处理成受摄二体问题,即一个简单可积的二体问题加上摄动改正两个部分。因此在利用动力学模型进行卫星定轨时,卫星的受力分析模型主要考虑地球中心引力和其他摄动力这两部分。卫星受摄二体问题所涉及的数学模型是一个相当复杂的非线性动力系统,在所选取的地心直角坐标系中,相应的运动微分方程可写为下列形式

其中,β是力模型涉及的物理参数和卫星本体的星体参数(如有效面质比),F0是地球作为质点的引力加速度,Fε为各种摄动加速度。
卫星在运动过程中,地球中心引力(即地球相当于一个密度分布均匀的球形天体,等效于质量集中在之心的质点引力)的作用是主要的,其余的作用力都相对较小。图1中给出了不同轨道上不同摄动力的量级,当卫星轨道高度低于780 km时,主要受地球中心引力、J2摄动和大气阻力影响;当卫星轨道高度高于780 km时,大气阻力可不考虑。实际计算中,将重力势的高阶项和其他的摄动力加入动力学模型,可能会大量增加不必要的计算,现而对实际精度却没有相应的提高,也不利于工程化的实现。因此,在建立卫星动力学模型时采用简单的摄动力模型:JGM-03重力场模型、大气阻力。这种简化的动力学模型称为简化动力学模型,或约化动力学模型[10-12]。

图1 卫星轨道不同摄动的量级
2 数值积分器
动力学模型建立常用于确定和预报人造卫星的轨道位置和速度[13-15]。这个模型根据作用于卫星的摄动力建立,描述了卫星的位置和速度随时间变化的关系。卫星的速度和位置可以根据开始历元卫星的速度和位置,对得到的卫星加速度分别进行一次和二次积分得到。
求解该运动方程的方法有数值法和解析法。由于数值方法计算简单、精度比较高,适合计算高精度轨道。在多种数值积分其中,采用应用最广泛的龙格库塔(Runge-Kutta)法进行计算。Runge-Kutta方法的基本思想是,函数在一点的导数值可以用改点附近若干点的函数值近似表示。N级Runge-Kutta方法的一般公式为
式中ci,ai,dij是待定常数。将Ki在(tm,rm)处作Taylor展开,并使局部阶段误差的阶尽量高,从而就确定出这些待定常数的方程。
实际仿真中采用的是四阶Runge-Kutta方法:

对四级Runge-Kutta方法,每计算一步,函数f需要计算四次。在新的观测数据到来之前,可根据当前时刻卫星的轨道位置、速度,进行数值积分预报下一时刻卫星的轨道位置和速度。
3 轨道外推仿真
卫星轨道外推基于J2000坐标系进行仿真。由于动力学模型本身具有误差,随着外推时间的增加,这些误差将在轨道外推的结果中累加扩大。因此,从外推起始点开始,外推时间越长,简化动力学模型外推误差也就越大。同时,数值积分器步长的选择对简化动力学模型的外推误差也有影响。外推时间长度一定时,步长越小外推误差越小(如图2、图3所示);反之,步长越大外推误差越大。此外,由于地球非球形摄动力和大气阻力对低轨卫星作用力显著,卫星轨道越低,动力学模型越不精确(如图4、图5所示)。模型精度越低,动力学外推精度越低。因此,简化动力学模型外推精度与卫星轨道高度也有密切的关系。

图2 动力学外推位置误差
为观察外推时长、积分器步长和卫星轨道高度对本文建立的简化动力学模型外推误差的影响,下面基于MATLAB和STK(Satellite Tool Kit)软件进行仿真。在STK中建立不同轨道高度的低轨卫星,导出它在J2000.0坐标系下的轨道和速度,作为分析简化动力学模型外推误差时的参照值。在MATLAB中实现简化动力学外推模型,从STK中导出J2000.0坐标系下该卫星的轨道初值,以此作为外推的起始点,将外推结果与对应时刻STK中该卫星的精确轨道值进行对比分析。
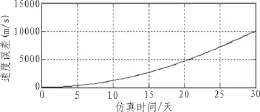
图3 动力学外推速度误差

图4 外推位置误差与轨道高度关系

图5 外推速度误差与轨道高度
STK中仿真步长设置为30s,共仿真30天,卫星的轨道参数为:近地点高度470 km,离心率0,轨道倾角83,近地点角距、升交点赤经和真近点角都为0。在MATLAB中外推步长设置为30s,计算30天内简化动力学外推位置和速度,比较与STK中精确轨道值,推出3维RMS(平方根)误差。根据卫星位置(图2)、速度(图3)的外推误差可知,随外推时间越长,简化动力学外推的位置速度误差越大。
4 结论
当外推时间长度越长时,简化动力学模型的位置、速度外推误差越大。短时外推精度高。在低轨道时,外推精度受轨道高度影响大且轨道越低精度越差;在高轨道时,轨道高度对外推精度影响不大,且外推精度都很高。因此高轨卫星更适合用轨道外推。当外推时间很短时,和接收机输出定位结果的时间间隔相当时,可以获得误差很小的卫星位置速度预报值,可用于星载GPS定轨。
[1]谢钢.GPS原理与接收机设计[M].北京:电子工业出版社,2009.
[2]张舒阳.卫星轨道方程的数值积分方法[D].长沙:国防科学技术大学研究生院,2009.
[3]常志巧,郝金明,张成军.GPS精密星历的外推精度分析[J].测绘工程,2006,15(2):27-39.
[4]秦显平.星载GPS低轨卫星定轨理论及方法研究[D].郑州:解放军信息工程大学,2009.
[5]贾沛璋,熊永清.星载GPS卡尔曼滤波定轨算法[J].天文学报,2005,46(4):441-451.
[6]袁建平,方群,郑愕.GPS在飞行器定位导航中的应用[M].西安:西北工业大学出版社,2000.
[7]Rankin D,Kekez D D,Zee R E,et al.The Canx-2 nanosatellite:expanding the science abilities of nanosatellites[J].acta astronautica,2005,57(2-8):167-174.
[8]高鹏.星载GPS低轨卫星非差简化动力法精密定轨[D].武汉:中国地震局地震研究所,2013.
[9]吴显兵.星载GPS低轨卫星几何法定轨及动力学平滑方法研究[D].郑州:解放军信息工程大学,2004.
[10]吴江飞.星载GPS卫星定轨中若干问题的研究[D].上海:中国科学院上海天文台,2006.
[11]Rodolpho Vilhena de Moraes,Aurea Aparecida da Silva,Koiti Kuga.Simple Orbit Determination using GPS based on aleast-squaresalgorithmemployingsequentialgivens rotations[J].Mathematical Problems in Engineering,2006.
[12]王甫红.星载GPS自主定轨理论及其软件实现[D].武汉:武汉大学,2006.
[13]李鑫.提高GPS定位精度的改进卡尔曼滤波算法研究[D].南京:南京理工大学,2004.
[14]Amandeep Mander·Sunil Bisnath.GPS-based precise orbit determination of low earth orbiters with limited resources[J].GPS Solutions,2012,17:587-594.
[15]Ana Paula Marins Chiaradia,Hélio Koiti Kuga.Onboard and real-time artificial satellite orbit determination using GPS[J].MathematicalProblemsinEngineering,2013,2:55-61.
Achieve satellite orbit extrapolation
LIU Cheng1,2,WANG Yong-yong1,2,ZHU Shu-zhen1,2,YU Jin-pei2,LIANG Guang2
(1.Shanghai Institute of Micro-system and Information Technology,Chinese Academy of Science,Shanghai 200120,China;2.Shanghai Engineering Center for Micro-satellite,Shanghai 200120,China)
Based on the disturbing force acting on the satellite,dynamic model to determine the position and velocity and the predicted orbit of satellites.In coordinates of J2000,Track extrapolated using Runge-Kutta Numerical Integrator,Joint MATLAB and STK software simulation.According to data analysis,draw some conclusions on Satellite Orbit.
STK;simplified dynamics;numerical integrator;extrapolation track
TN915
A
1674-6236(2016)17-0132-03
2016-02-22稿件编号:201602101
国家自然科学基金(61401278)
刘成(1989—),男,四川泸州人,硕士研究生。研究方向:星载GPS接收机设计及定轨技术研究。
