基于模糊PID的塔吊防摆控制算法研究
2016-10-22陈忠孝李雪艳秦刚邵亚强韩锦波
陈忠孝,李雪艳,秦刚,邵亚强,韩锦波
(西安工业大学电子信息工程学院,陕西西安710021)
基于模糊PID的塔吊防摆控制算法研究
陈忠孝,李雪艳,秦刚,邵亚强,韩锦波
(西安工业大学电子信息工程学院,陕西西安710021)
基于塔吊吊物的高效运行和安全性为目的,采用了一种基于模糊PID控制的算法来进行塔吊消摆。通过塔吊防摆控制系统的模糊PID控制器对小车移动的位移进行控制,同时用模糊控制算法对摆角进行控制,即控制塔吊变幅和起升电机的转速,从而得出小车的准确定位和吊物快速防摆。通过MATLAB仿真可以看出用此方法响应速度只用了14s,系统具有较强的鲁棒性。
塔吊防摆;模糊控制;模糊PID控制;仿真
随着城市化建设的快速发展,一座座高楼大厦拨地而起,塔吊也越来越多的被我们所熟知。它常用于市政建设、交通、桥梁等施工场所对材料的运输。对劳动力的节省、建设成本的降低、劳动强度的减轻、施工效率的提高、工程施工机械化的实现起着重要作用。然而在塔吊的工作过程中,塔吊的启动、停运、重物的惯性特性以及风速等一系列因素会对小车的吊运造成一定的影响,发生摆动现象。塔吊司机并不能完全控制吊物的摆动现象,这将会严重影响到塔吊的工作效率,并有可能造成一定的安全隐患。所以塔吊消摆的研究具有很大的意义。文中采用模糊PID控制方法,运用Matlab仿真实验验证该方法能较好的控制吊物的摆动。下面将对这项研究做了一定程度的介绍。
1 塔吊防摆控制系统动力学模型的建立
从动力学角度分析塔吊防摆控制系统,通过分析系统的受力情况,来探究系统的运动轨迹。文中采用拉格朗日力学体系来建立塔吊防摆系统的数学模型。拉格朗日方程是对于完整系统用广义坐标表示的运动系统的动力学方程,它是用分析的方法解决动力学问题的出发点。因此,解决复杂的非自由质点系的运动系统,拉格朗日方程更加简便有效。方程的普遍形式为:

式中:L Lagrange函数,L=V-U;
qx(t)和θ(t)的自由度;
Qi广义力,它表示广义坐标方向qi对应的力,D=∂W/(∂qi),其中W是非保守力(阻尼力除外)所做的功。塔吊吊重物时的水平方向的运动要求较高,不仅要求小车准确定位,还要实现吊物的快速消摆现象。所以本文主要分析塔吊负载的水平运动,根据实际情况,提升电机带动小车把负载运送到指定位置,首先提升电机起动将负载提升到一个适当的高度,然后绳长保持不变,负载跟着小车做水平运动。当吊物到达指定位置的上空时,再启动起升电机使小车将负载放在目的地。由此塔机运送吊物的过程可以被分解成水平运动过程和上下垂直运动过程,进而进行分别控制。力学结构分析如图1所示。
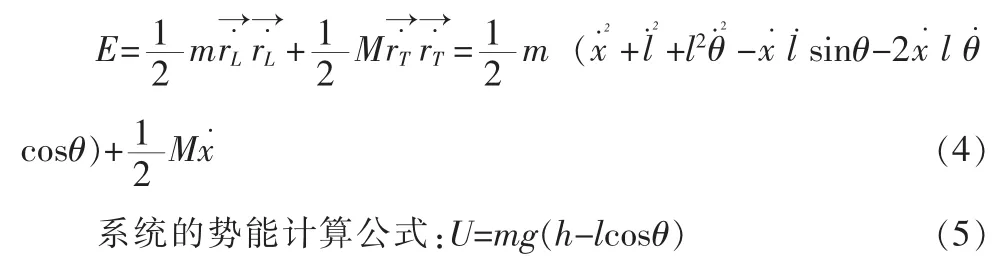
在塔吊力学模型中,负载和小车的位置在塔吊模型中的受力分析,负载和小车的位置向量和分别表示为:


图1 塔吊的力学结构模型

从而得到塔吊防摆系统的动能为:
塔吊防摆控制系统的拉格朗日算子的计算公式:


将受力分析中的各个参数代入拉格朗日方程得到塔吊防摆系统的力学模型,小车受到的外力有牵引力F和摩擦力f,摩擦力f与小车速度x.的关系近似呈线性。设摩擦系数μ,则f=x.μ,代入拉格朗日方程得到:

在广义坐标θ下,忽略空气阻尼力、小车和吊绳之间摩擦力,即Fθ=0。则变形后的方程为:

在广义坐标l下,钢丝绳受到的起升力为Fl,从而得到:

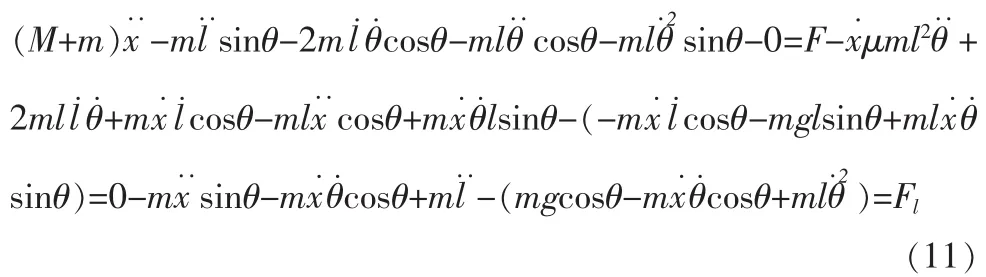
将各个参数代入式(8)、(9)、(10)得到方程组(11):
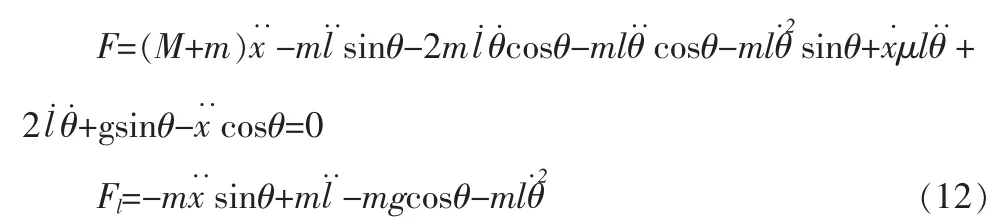
式(11)整理可得绳长可变时,塔吊防摆系统的非线性动力学微分方程可变为:


将(13)中的方程式进行化简得到式(14)。

对公式(14)进行拉氏变换可以得到塔吊防摆系统的复变函数(15),根据式(15)可以得出塔吊防摆控制系统的传递函数如图2所示。

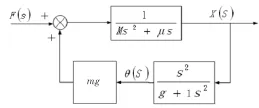
图2 塔吊防摆控制系统传递函数图
2 模糊自适应PID控制
塔吊防摆控制是一个非线性、大惯性的复杂控制系统,很难建立精确的数学模型,因而采用常规的PID控制算法很难实现理想的控制效果。文中采用模糊PID控制,模糊控制具有控制精度高、抗干扰能力强的特点,自适应PID控制具有操作简单、可以适应参数的变化。模糊自适应PID控制是将模糊控制和PID控制算法结合在一起,同时具有这两种控制方法的优势和局限性,使系统既具有良好的动态性能,又具有良好的静态性能。从而使系统达到更好的防摆控制效果。
2.1模糊控制原理
模糊控制本质上是一种非线性的控制算法,在智能控制的领域内。模糊控制的基本思想是在被控对象无法精确建立或无法建立数学模型时,把手动控制经验用语言加以描述,形成控制规则,再利用模糊理论、模糊逻辑推理和模糊语言变量,将模糊的控制规则变成数值运算,这些控制规则这样就可以结合计算机运行程序来实现,通过计算机模拟人的思维进行自动控制被控对象。模糊数据和规则库、模糊器、模糊推理机和解模糊器构成模糊控制系统。模糊控制器的结构、模糊规则、推理算法以及模糊决策的方法等因素决定了而模糊系统的性能优劣。
2.2PID控制原理
在实际的工程应用中,使用最为广泛的调节器控制规律为比例、积分、微分控制,简称PID控制,又叫PID调节。由于它用途广泛、使用灵活,已有系列化产品,使用中只需设定3个参数(kP,kI和kD)即可。控制偏差:

其输入e(t)与输出u(t)的关系为:

因此它的传递函数为:

其中kp为比例系数;kI为积分时间常数;kD为微分时间常数通过比例、积分、微分的线性组合可以控制偏差,由输入e(t)与输出μ(t)的关系可以得到控制规律如式(17),从而合理的控制被控对象。比例系数Kp的作用是加快系统响应速度和改善系统稳态控制精度。积分系数kI的作用是消除系统的稳态误差,提高系统的无差度。微分系数kD的作用在于改善系统的动态特性,反映系统偏差变化并能提前预报偏差变化的趋势,产生超前的控制功能,降低系统的超调,提高系统的稳定性。在试凑比例、积分、微分参数时,为了寻求最佳的PID控制,则要在仿真以及实验过程中需要根据理论进行不断的调试。在塔吊防摆控制系统被控对象参数改变时,可以通过调节PID控制器的相应参数进行整定。
3 塔吊防摆控制的模糊PID控制器的设计
文中实验的目标是在已知起吊点的情况下,牵引小车准确无误的到达指定的位置,同时清除塔吊负载的摆荡。即依据指定的小车行走距离和反馈回来负载摆角信号,并运用模糊PID控制算法和模糊控制算法求出输出相应的电信号给驱动电机,来控制小车带动负载快速到达给定位置,同时做到悬绳摆角快速消减至零。
3.1模糊PID控制器的设计
模糊控制器按照输入量的个数可分为一维模糊控制器,二维模糊控制器,三维模糊控制器等等。在这几类模糊控制器中二维模糊控制器适用性最好,结构形式更加多样。所以文中采用二维的模糊控制器。
当模糊PID控制系统运行时,模糊控制器通过检测当前输入量的偏差e和偏差变化率ec,并根据模糊规则对PID控制器3个参数kP、kI、kD进行在线整定,从而满足当前控制需求,直至到达稳定状态。模糊PID控制器结构图如图3所示。

图3 模糊PID控制结构
3.2塔吊防摆系统模糊PID控制器的设计
在实际操作中,塔吊司机将重物从一个地点吊运到另一个地点时,往往都会采用“加速、匀速、减速”的方法。在小车停下时,吊重仍会不断的摆动,经过一定的时间才能停止。因此对电机转速的控制进而对小车的位移和对吊物摆动的摆角进行控制,成了必不可少的一步。本文设计塔吊控制模型如图4所示,塔吊系统为一个单输入、多输出的系统,采用小车位移和摆角双闭环控制方式对它进行控制,如图4所示。系统外环为位置控制环,实现小车的精确定位;系统内环为塔吊摆角控制环,控制在塔吊运行过程中摆角的幅度。

图4 塔吊防摆模糊PID控制器
3.3塔机防摆控制系统中模糊PID控制规则表
因为塔机防摆控制系统既要完成小车准确到达指定位置,同时又要抑制负载摆角,所以想要取得良好的控制效果,需要设计两个模糊控制器,分别控制定位和摆角。在塔吊防摆模糊PID控制系统中,输入误差e和误差变化率ec,输出变量kP、kI、kD。常用{NB(负大),NM(负中),NS(负小),ZO(零),PS(正小),PM(正中),PB(正大)}语言变量来描述。e、ec、kP、kI、kD和u其隶属函数类型采用等腰三角形。
控制规则描述如下所示:
1)当摆角超前吊绳时,小车驱动力增大,可减小摆角;
2)当摆角落后吊绳时,小车驱动力减小,可减小摆角;
3)当小车位移偏差为正时,小车驱动力增大,可减小摆角;
4)当小车位移偏差为负时,小车驱动力减小,可减小摆角。依据以上4条基本理论和依据,可以列出KP、KI、KD和u的模糊控制规则表如表1~表4所示。

表1kP的模糊控制规则

表2KI的模糊控制规则
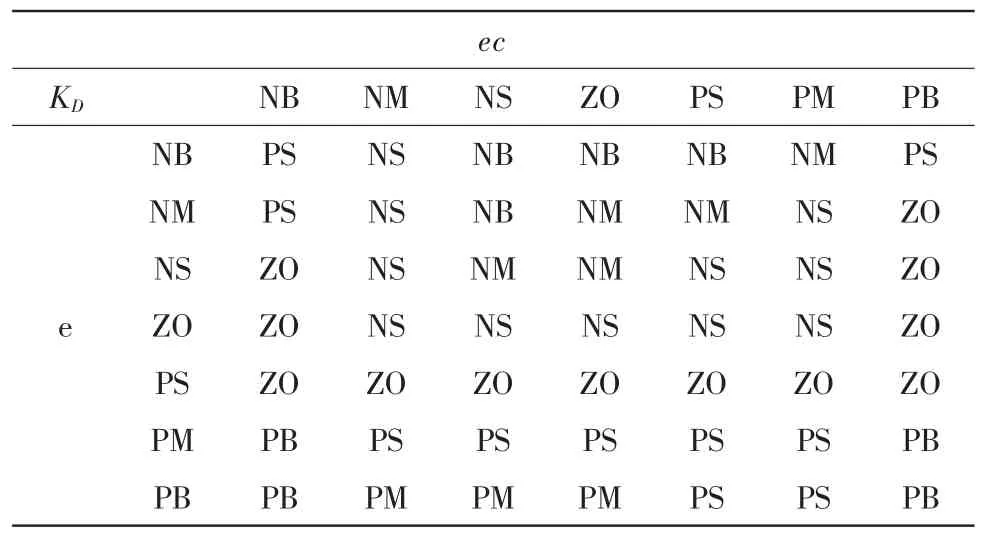
表3kD的模糊控制规则

表4u的模糊控制规则

图5 塔吊防摆控制系统的仿真结构图
4 基于模糊PID控制算法的塔吊防摆系统仿真研究
等比例缩小实际塔机参数得到塔机防摆模型参数如下:M=10 kg,m=50 kg,l=2m,X=5m,取μ=0.2代入传递函数中,根据以上对塔吊防摆控制器的设计,在Matlab中输入Simulink,从而建立塔吊防摆控制系统的仿真结构如图5所示。
根据仿真模型在Simulink中进行的仿真实验,设置图中的PID控制模块的kP、kI、kD3个参数的值,经过多次的试验调整,得到最佳的仿真结果。初始PID的3个参数值为kP= 3.5、kI=0.3、kD=4.6。根据模糊格则表对3个参数进行不断的修正,得到最佳值。仿真曲线如下图。图6是模糊PID控制的小车位移曲线,图7是模糊PID控制的塔吊摆角角度曲线。
从以上两图中不难看出,小车位移在距塔机旋转轴5米处停下,曲线中显示响应速度非常快,没有静态误差,即小车能够快速准确地定位。角度曲线中显示角度达到稳定的时间只用了14s,即当塔吊的吊物到达指定位置时,摆角也随即减小到零,节省了塔机的控制时间。用模糊PID控制算法能快速的进行响应,改善了控制效果,从而提高塔吊工作效率,减少安全隐患。

图6 模糊PID位移曲线

图7 模糊PID角度曲线
5 结论
针对塔吊的小车位移和负载摆角进行了研究,提出了基于模糊PID控制算法,分析塔吊系统防摆模型,并设计了模糊PID和模糊控制器,利用自适应PID参数[16-17]调节和模糊控制中的模糊规则,实现塔吊防摆的准确定位和防摆,仿真结果表明了该方法的优越性和可行性。这种方法可以推广运用到其他型号的塔吊的防摆控制系统设计上,最终代替人工操作实现塔吊吊重物的自动运行。
[1]周进.塔吊安全监控保护系统及关键算法研究[D].哈尔滨:哈尔滨工业大学,2010.
[2]张营章.动臂变幅塔式起重机动力学性能分析与仿真研究[D].天津:河北工业大学,2014.
[3]游谊.塔式起重机智能防摆控制研究[D].上海:信息与机电工程学院,2013.
[4]杨益兴,崔大连.模糊自适应PID控制器及Simulink仿真实现[J].海军大连舰艇学院,2008(9):20-23.
[5]王述彦,师宇.基于模糊PID控制器的控制方法研究[J].机械科学与技术,2011,15(2):30-32.
[6]田凡.电液伺服系统模糊PID控制仿真与试验研究[D].太原:太原理工大学,2010.
[7]李卓,萧德云,何世忠.基于Fuzzy推理的自调整PID控制器[J].控制理论与应用,1997,14(2):238-242.
[8]赵辉,王红君.规则自适应模糊控制在同步发电机励磁系统中的应用[J].电网技术,2004,28(1):27-29.
[9]徐峰,李东海,姜学智等.基于实验的PID参数整定比较方法[J].清华大学学报:自然科学版,2002,42(2):1651-1655.
[10]何芝强.PID控制器参数整定方法及其应用研究[D].杭州:浙江大学,2005.
[11]Rosenfeld Yehiel,Shapira Aviad.Automation of existing towercranes;Economicandtechnologyicalfeasibility[J].Automation in Construction,1998,7(4);285-298.
[12]C.John Smith.Duality is cranes is key to safty[J].Cranes Today,1998(3):26-28.
[13]Leonard Bernold.Intelligent technology for crane accident prevention construction engineering and management,1997(9);122-124.
[14]ZHANG Gui-qing,WANG Ming,YAN Qiao,et al.Design and Implement of a Multifunction Black-box for Tower Crane[C]// InternationalConferenceonMechanicalMechanics,2005:26-28.
[15]孙凌夫.移动塔吊基础结构设计及力学性能研究[D].太原:太原理工大学,2012.
[16]高峰.基于二自由度内模控制的PID参数整定方法研究[J].电子设计工程,2015(12):78-79.
[17]钟旭佳,高晓丁,严楠.电液比例压力控制系统的PID参数优化[J].西安工业大学学报,2015(2):106-11.
Research on tower crane anti-swing control based on a fuzzy PID controller
CHEN Zhong-xiao,LI Xue-yan,QIN Gang,SHAO Ya-qiang,HAN Jin-bo
(Electronic Information Engineering College of Xi'an Technological University,Xi'an 710021,China)
Based on the efficiently and safety of tower crane,a method based on fuzzy PID control is proposed in this paper.By using a tower crane anti-sway fuzzy PID controller of displacement and swing angle control,It means that it is necessary for tower Crane to control the rotating speed of Amplitude and lifting,which would reach the effect of position and anti-sway.MATLAB simulation can be proved that the method is feasible and the speed of the system is 14s,so the system has strong robustness.
crane anti-sway;fuzzy control;fuzzy PID controller;simulation
TN9
A
1674-6236(2016)17-0111-05
2016-03-08稿件编号:201603092
陕西省科学技术研究发展计划项目(2014K05-06)
陈忠孝(1963—),男,陕西渭南人,教授。研究方向:变配电系统和建筑电气的工程设计。
