主动全向声纳浮标性能预测
2016-10-22梁巍杨日杰熊雄程翔
梁巍,杨日杰,熊雄,程翔
(1.海军航空工程学院电子信息工程系,山东烟台264001;2.92635部队,山东青岛266000;3.91498部队,河北秦皇岛066000;4.95972部队,甘肃酒泉735018)
主动全向声纳浮标性能预测
梁巍1,2,杨日杰1,熊雄3,程翔4
(1.海军航空工程学院电子信息工程系,山东烟台264001;2.92635部队,山东青岛266000;3.91498部队,河北秦皇岛066000;4.95972部队,甘肃酒泉735018)
主动声纳浮标适合探测安静型潜艇,预测主动声纳浮标的性能已成为航空反潜战的重要内容。文章首先简要分析了水声传播模型、海底和海面损失模型以及混响模型等声纳模型的优劣并进行合理选择;在此基础上,提出了一种主动全向声纳浮标性能预测系统的总体方案,并设计了相应软件;最后,针对不同的海洋环境进行仿真实验。该系统能预测主动声纳浮标在各传播方向、水平距离和深度的传播损失及检测概率,可以用于分析浮标性能的时空变化特性,为优化使用声纳浮标提供参考。
主动全向声纳浮标;性能预测;检测概率;传播损失
声纳浮标在航空反潜中已得到广泛应用,随着潜艇降噪技术的发展,在环境噪声大的海域,被动声纳浮标探测范围越来越小。与被动浮标相比,主动浮标更加适合探测安静型潜艇。因此,预测主动声纳浮标的性能已成为航空反潜战的重要内容。
预测主动声纳浮标性能需要合理选择声纳模型和衡量声纳性能指标。根据声纳方程,声纳模型应该包括声源、目标强度、声传播、噪声、混响、海面/海底损失和信号检测等。在选择这些模型时需权衡精确性和计算速度。例如,采用早期的基于经验公式的声传播模型,运算速度快,但精度较差[1-2]。在性能指标选取上,已有文献大多涉及声纳作用距离,很少关注各处的检测概率和虚警概率[1-4]。通常将作用距离定义为在正确检测目标概率等于给定值时的最大作用距离,很多情况下该检测概率取0.5。随着计算机技术的发展,为优化使用声纳,不仅需声纳的作用距离,还需要各传播方向、水平距离和深度上的检测概率。因此,用声传播方向、水平距离和深度的检测概率衡量主动声纳的性能将更加全面,必要的情况下还可以给出相应虚警概率。
鉴于上述考虑,文章首先从精确度、运算速度、处理水平变化能力和频率适应性等方面对比分析各声纳模型的优劣并进行合理选择;然后,提出了一种预测主动全向声纳浮标性能的设计方案;最后,进行了仿真实验并分析了不足点。
1 主动声纳模型
主动单基地声纳依据噪声或混响限制条件的不同表述成以下声纳方程[5-6]:
式(1)~(3)中:SL为声源级;TL为传播损失;TS为目标强度;NL为环境噪声级;RL为混响级;DI为指向性指数,对于全向声纳浮标DI=0;DT为检测域,在本文中DT用的是滤波器系统;d为检测指数,由接收机的ROC曲线确定;T为脉冲长度;B为接收机有效带宽。
假定主动全向声纳浮标发射脉冲为单频脉冲信号,脉宽一般在1 s以内,结合声源级、换能器指向性就可以建立声源模型;由于不同的声纳设备采用的信号检测方式可能不一样,不能建立统一的信号检测模型。因此,在性能预测过程中假定接收机的ROC曲线已知;目标强度通过目标不同型号予以确定;环境噪声可根据实测的噪声谱确定,也可以通过经典的深海平均噪声谱大体估算[7]。
1.1声传播模型
按照物理特性和数学函数,将现有声传播模型分为5大类:射线理论、简正波模型、PE模型、多径展开模型和快速声场模型[7]。以下从3方面对比这几种声学模型的优劣。
1)在处理水平变化的海洋环境方面,射线理论和PE模型最适合,经过扩展的简正波模型也能处理,但处理能力弱。
2)在精确性和计算速度方面,PE方法计算声场精确,经常作为一种标准模型检验其他模型的准确性,但对大于1 kHz的工作频率,计算速度极慢,作为工程应用不合适。简正波模型在低频浅海环境下计算速度快,还能正确描绘声场,但在高频、深海环境中也存在计算速度慢的缺点。
3)在处理主动传播方面,PE模型只能计算前向场且没有时间差,通常被认为不适合主动传播建模;简正波理论严格讲也没有时间差或者说不能计算散射场,然而用模拟射线的方法将简正波能量分解成上行波和下行波,使之能适合处理主动声传播;由于射线理论中的射线按时间点分布,很容易处理边界混响和散射,所以说射线理论是最适合主动声传播的模型。
对于主动声纳的声传播模型,虽然射线理论计算声场存在弱点,但从处理主动声传播、水平变化的水声环境和计算速度等方面考虑,选择射线理论较合适。1996年提出的GRAB(Gaussian Ray Bundle)模型,允许射线有“宽度”,深度方向上的能量分布从射线中央向上下作高斯扩展,该技术一定程度上改善了射线理论的性能,在1 kHz频率时,与标准预测模型EFEPE相比吻合较好[8]。本文只考虑主动全向声纳浮标,工作频率一般在1~20 kHz之间,因而选用基于GRAB的射线理论作为声传播模型。以下阐述基于GRAB的传播损失的计算过程。
射线声学满足波动方程:

式(4)中:c为声速,与位置s=(x,y,z)有关;p为声压。
设声压为:

式(5)中:A(s)为声压幅度;ω为声源频率;k0=ω/c0为声源处波数;φ(s)具有长度量纲。
将式(4)代入式(3):


用特征法求解,得二维声线轨迹方程[9]:

式(8)中:s表示射线的弧长;[r(s),z(s)]是水平距离-深度平面内的射线轨迹;正切于s处的射线。
设(r0,z0)是声源的水平距离和深度的坐标,α为射线初始角,则方程(8)的初始条件为:

每束射线引起的声压为

式(10)中:τ(s)为沿声线的传播时间;n(s)是接收点到声束中心射线的法向距离;ϕ(n,s)表示声束范围内声场的分布规律。
对于基于GRAB的射线理论,它们的计算式表示如下:

式(12)~(13)中,a=-4ln(β)/(δα)2,β为声束因子,表示相邻声束中心射线之间的距离。
在某接收点处(r,z)的总声压为各声束在该点引起的声压和p(r,z)[10]:

式(14)中:N(r,z)为该接收点处声场的特征声线数目;pj(r,z)为第j条特征声线束产生的声压。
声场中,不同位置有贡献的特征声线数目是不同的,随接收位置以及声线与海面和海底界面接触的次数而变化。
根据定义可得传播损失:

式(15)p(r,z)部分采用非相干处理,忽略了每根特征声线的声压相位,p0为离声源中心1 m处的声压,

传播损失计算和寻找本征声线,采用了Bellhop程序(http://oalib.hlsresearch.com)。为了提高运算速度,关闭了“curvature double”、“beam shifts”和“海平面高度”等出于研究目的的选项,声速采用线性插值,海面/海底反射系数从外部输入,计算方法在1.3节中论述。
1.2混响模型
混响是存在于海洋中的大量无规则散射体对入射声信号产生的散射波信号在接收点叠加而形成的。根据海洋中产生混响的散射源不同可将混响分为体积混响、海面混响与海底混响。
边界混响强度可以表示为[11]:

式(17)中:t、r分别表示声源和接收器;I0表示声源声强;dA是散射元面积;φ为水平方位角;θs、θr分别表示入射角和散射角;S(θt,θs,φ)表示散射强度;Ps(θs)、Pr(θr)分别表示源信号到散射单元、散射单元到源信号的传播损失。
基于不同传播模型的混响计算主要区别在P项。目前,计算混响强度通常采用简正波模型、PE模型和射线模型[11-14]。与传播模型类似,简正波方法不适合水平距离变化的环境,PE方法在1 kHz以上计算速度慢。一般的射线方法有些局限性,不适合“焦散线”和“汇聚区”,而且遍历散射体与接收器/发射器之间的本征射线相当费时。但射线方法的计算时间与频率无关,只与射线的采样强度有关。GRAB射线模型允许射线“折弯”,较容易寻找本征声线,一定程度上提高了运行速度[15]。另外GRAB可以有效地处理相关特性。故采用基于GRAB射线理论的混响模型,计算方法见文献[16]。
1.3海面和海底反射损失
计算海面和海底损失的方法很多,基于射线理论的方法将声波看作平面波,海面在无风情况下反射系数为-1。考虑到海面和海底的不平整性而引起前向散射,将这种散射的影响计入到界面损失中去,在粗糙度较小的情况下,反射系数用经验公式取代:[17]

2 主动全向声纳浮标性能预测实现过程
预测主动全向声纳浮标性能的步骤如下:
1)确定声纳本身的技术指标,主要包括工作频率、带宽、声源级、收发换能器的水平/垂直指向性指数及声纳深度等。
2)建立海洋环境。海洋环境有声速剖面数据、海底高程、沉积层属性等。结合声纳的工作频带,该步骤可完成海洋环境噪声和海面/海底反射系数的计算。
3)目标信息设置。目标信息指目标强度、目标位置(水平方位、距离和深度),其中目标位置均匀分布在N个水平方向对应的二维垂直剖面上。
4)根据频率和精度要求选择Bellhop程序计算声传播损失。
5)混响强度计算。当不知道是混响遮蔽为主还是噪声遮蔽为主时,平均混响强度和海洋环境噪声均要计算,以便比较,确定采用式(1)还是式(2)计算检测概率。
6)求检测阈DT,结合ROC曲线,得到检测概率和虚警概率。
3 主动全向声纳浮标性能预测软件设计
主动浮标性能预测软件可以在给定声纳特性、目标特性和海洋环境的条件下,方便地计算传播损失和检测概率并能生成指定水平方向的声线轨迹剖面。因此,将预测系统设计成5部分:声纳特性模块、目标特性模块、海洋环境模块、操作界面模块和Bellhop扩展模块,如图1所示。

图1 总体方案Fig.1 Overall plan
声纳设置和目标设置分别用来获取声纳和目标的属性。海洋环境模块较为复杂,包括海洋地理数据库、水声环境数据库、海洋环境设置程序、海洋环境浏览程序等[18]。其中,海洋环境浏览程序用来查看某海域在一定时间的CTD(Conductivity Temperature Depth)数据、海深和海底属性等,方便确定声纳投放地点。海洋环境设置程序不仅可以利用实际的测量数据,也可根据需要自定义海洋环境用于检验分析。基于Bellhop的扩展模块完成海面/海底损失计算、传播损失计算、本征声线寻找、混响计算和海洋环境噪声计算、检测概率和虚警概率的计算等功能。
3.1数据库设计
为了便于分析声纳性能的时变性,建立了海洋地理数据库和水声环境数据库。海洋地理数据,包括海深和海底属性(包括粗糙度、底质和沉积层厚度等)。遗憾的是除了沉积层深度外海底属性数据非常缺乏,只有少数海域有公开数据,大部分海域只有简单的底质描述,因而该数据库不完整也不精确。水声环境数据库包括历年测量的CTD数据和按月份平均的温深盐数据。所有这些数据资料均可从互联网上下载(http://www.nodc.noaa.gov)。
3.2操作界面设计
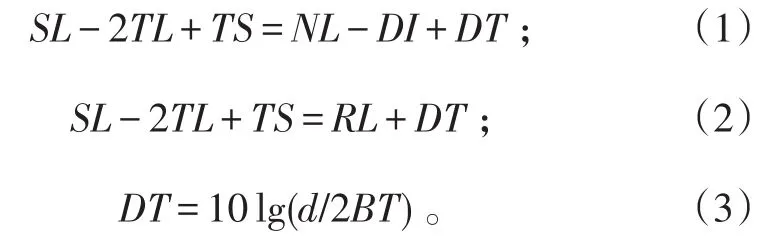
操作界面是预测软件的控制中心,完成各种参数的输入、计算结果(包括数据、曲线和图片)的显示。整个软件有2个主要操作界面:参数设置界面和性能浏览界面。参数设置界面如图2所示。左边为电子地图操作区,可以用放大或缩小模式查看海深和CTD数据分布状况,放置声纳等。右边为设置区,不仅可以设定声纳参数、目标参数、运行参数等,还能浏览温度曲线、声速曲线和声纳指向性图等二维图片。
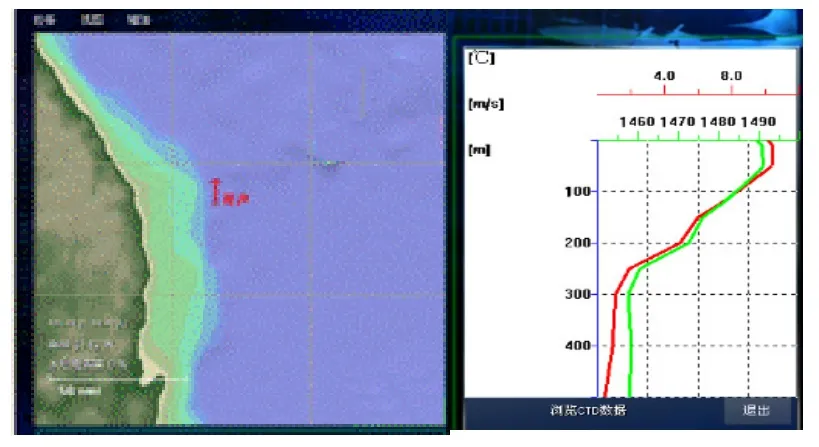
图2 设置界面Fig.2 Set interface
4 仿真实验
假定目标强度为20dB,将无指向性的单频声纳浮标(7.5 kHz)放置在某海域中,具体位置和CTD数据如图2所示,取2月份的平均水声数据,图3显示了该声纳的性能,左侧是指定深度的检测概率剖面,右侧从上到下依次表示指定水平方向的声线、传播损失和检测概率垂直剖面。由于声纳置于“斜坡”上,东面是水声环境较好盆地,海深超过2km,西面是倾斜的沿海地带,由300 m左右的深度骤然降至2km以下,水声环境较差。由图3可知在300 m接收深度上往东检测概率超过50%的距离将近16km,往西却不到10km。将同样的声纳置于几乎是各向同性的浅海环境中,声速为1.510km/s,混响是主要干扰,图4标示了声纳处于30 m接收深度的水平检测概率。可见检测概率超过50%的距离小于10km,在各水平方向上性能几乎一致。
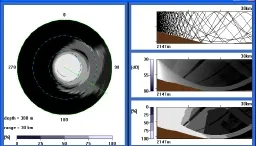
图3 主动声纳深海性能预测Fig.3 Deep sea performance prediction of active sonar

图4 主动声纳浅海性能预测Fig.4 Shallow-water performance prediction of active sonar
5 小结
本文以声纳方程为基础,从频率适用性、处理水平变化环境的能力、处理主动声传播能力、计算精度和速度等方面对比了声传播模型和混响模型,从而合理选用了基于GRAB射线理论的传播模型和混响模型。采用各水平方向、距离和深度上的检测概率和虚警概率作为衡量主动声纳性能的指标。在此基础上,架构了主动全向声纳浮标性能预测系统,设计了相应软件,并针对2种不同的海洋环境进行仿真实验。
预测系统可以利用历年的测量数据分析声纳性能的时空变化特性,为反潜训练和考核提供一个有价值的手段;另外,该系统也可依据实测的或仿真的海洋地理环境数据、水声数据计算主动声纳的传播损失和检测概率,为主动全向声纳浮标的优化使用提供参考。
该系统还有诸多不足。首先,表现在海底损失方面,缺乏完整的高分辨的地理声学数据,而且反射系数应采用更为精确的计算模型;需建立声纳数据库和目标潜艇的数据库,使性能估算更有针对性;不能预测多基地声纳系统的性能。
[1]杨日杰,何友,孙明太.航空搜潜装备搜潜范围建模与仿真研究[J].系统仿真学报,2003,15(11):1547-1549.YANG RIJIE,HE YOU,SUN MINGTAI.Search scope modeling and simulation research for aviation searching submarine equipments[J].Acta Simulate Systematica Sinica,2003,15(11):1547-1549.(in Chinese)
[2]曹之新,周业明,陈建华.舰艇声纳作用距离预报仿真研究[J].军事运筹与系统工程,2007,21(3):31-34. CAO ZHIXIN,ZHOU YEMING,CHEN JIANHUA.Research of forecast simulation on operating range of ship,s sonar[J].Military Operations Research and Systems Engineering,2007,21(3):31-34.(in Chinese)
[3]季蓓,程健庆,曹志敏.被动声纳作用距离预报的仿真研究[J].计算机仿真,2007,24(3):31-35. JI BEI,CHENG JIANQING,CAO ZHIMIN.Simulation of detection range forecast for passive sonar[J].Computer Simulation,2007,24(3):31-35.(in Chinese)
[4]何心怡,蔡志明,林建域,等.主动声纳探测距离预报仿真研究[J].系统仿真学报,2003,15(9):1304-1306. HE XINYI,CAI ZHIMING,LIN JIANYU,et al.The simulation research on forecasting the detection range of active sonar[J].Acta Simulate Systematica Sinica,2003,15(9):1304-1306.(in Chinese)
[5]刘伯胜,雷家煜.水声学原理[M].哈尔滨:哈尔滨船舶工程学院出版社,1989:10-11. LIU BOSHENG,LEI JIAYU.Underwater acoustics principle[M].Harbin:Harbin Institute of Marine Engineering Press,1989:10-11.(in Chinese)
[6]田坦,刘国枝,孙大军.声纳技术[M].哈尔滨:哈尔滨工程大学出版社,2000:202-203. TIAN TAN,LIU GUOZHI,SUN DAJUN.Sonar technology[M].Harbin:Harbin Engineering University Press,2000:202-203.(in Chinese)
[7]PAUL C ETTER.水声建模与仿真[M].3版蔡志明,译.北京:电子工业出版社,2005:225-232,112-113. PAUL C ETTER.Underwater acoustic modeling and simulation[M].3rd ed.CAI zhiming.Beijing:Publishing House of Electronics Industry,2005:225-232,112-113.(in Chinese)
[8]DIANA MCCAMMON.Active sonar modelling with emphasis on sonar stimulators[R].Atlantic:Defence R&D Canada,2004:4-5.
[9]JENSEN F B,KUPERMAN W A,PORTER M B,et al. Computational ocean acoustics[M].New York:Spring-Verlag,2000:316.
[10]JENSEN F,KUPERMAN W,PORTER M,et al.Computational ocean acoustics[M].New York:AIP Series in Modern Acoustics and Signal Processing,1994:12-14,103-105,170-171,191-193,257-329.
[11]郭熙业,苏绍璟,王跃科.基于射线理论的海底混响建模研究[J].声学技术,2009,28(3):203-207. GUO XIYE,SU SHAOJING,WANG YUEKE.Research on the signal modeling method for sea bottom reverberation based on ray theory[J].Technical Acoustics,2009,28(3):203-207.(in Chinese)
[12]黄晓燕,冯西安,高天德.任意形状海底的混响谱模型及仿真[J].系统仿真学报,2014,26(11):2576-2580. HUANG XIAOYAN,FENG XIAN,GAO TIANDE.Reverberation spectra modeling and simulation of arbitrary sea bottom shape[J].Acta Simulate Systematica Sinica,2014,26(11):2576-2580.(in Chinese)
[13]王志强,姜卫东,安良,等.三维浅海简正波混响模型[J].声学技术,2007,26(5):802-805. WANG ZHIQIANG,JIANG WEIDONG,AN LIANG,et al.Three-dimensional shallow-water normal-mode reverberation model[J].TechnicalAcoustics,2007,26(5):802-805.(in Chinese)
[14]SMITH KEVIN B,HODGKISS WILLIAM S,TAPPERT FREDERICK D.Propagation and analysis issues in the prediction of long-range reverberation[J].Journal of Acoustics SocietyAmerica,1996,99(3):1387-1404.
[15]HENRY WEINBERG,RUTH E KEENAN.Gaussian ray bundles for modeling high-frequency propagation loss under shallow-water conditions[R].Rhode Island:Naval Undersea Warfare Center Division,1996:454-456.
[16]KEENAN RUTH ETA.An introduction to GRAB eigenrays and CASS reverberation and Signal Excess[C]// OCEANS 2000 MTS/IEEE Conference and Exhibition. 2000:1065-1070.
[17]MICHAEL A AINSLIE.Principles of sonar performance modeling[M].Berlin Heidelberg:Springer-Verlag,2010:201-203.
[18]笪良龙.海洋水声环境效应建模与应用[M].北京:科学出版社,2012:43-49. DA LIANGLONG.Ocean acoustic environment effects modeling and application[M].Beijing:Science Press,2012:43-49.(in Chinese)
Active Omni-Directional Sonobuoys Performance Prediction
LIANG Wei1,2,YANG Rijie1,XIONG Xiong3,CHENG Xiang4
(1.Department of Electronic Information Engineering,NAAU,Yantai Shandong 264001,China;2.The 92635thUnit of PLA,Qingdao Shandong 266000,China;3.The 91498thUnit of PLA,Qinhuangdao Hebei 066000,China;4.The 95972ndUnit of PLA,Jiuquan Gansu 735018,China)
Active omni-directional sonobuoys are fit for tracking quiet submarine.The active sonobuoys performance prediction has been an important part in aviation anti-submarine warfare.Firstly,sonar models including acoustic transmission model,sea surface/bottom loss model and reverberation model were analyzed and selected.On these bases,the design scheme of a simulation system for active omni-directional sonobuoys performance prediction is presented and the software was established.Finally,simulations under different condition were given.The system can predict transmission loss and detection probability at any horizontal direction,distance and depth,which can be used to analyze active sonobuoys performance under different time and space so as to use sonobuoys reasonably.
active omni-directional sonobuoys;performance prediction;detection probability;transmission loss
E925.4;U666.7
A
1673-1522(2016)03-0385-05DOI:10.7682/j.issn.1673-1522.2016.03.015
2016-03-20;
2016-05-02
国家自然科学基金资助项目(61271444)
梁巍(1984-),男,硕士生;杨日杰(1963-),男,教授,博士。
