多功能颈椎牵引椅的研制
2016-10-18成志新王京华韩爱民金振华沈正斌
成志新,王京华,韩爱民,金振华,沈正斌
(山东省药学科学院,济南 250000)
1 引 言
颈椎病又称颈椎综合征,主要由于颈椎长期劳损、椎间盘脱出、韧带增厚,导致颈椎脊髓、神经根或椎动脉受压,从而出现的一系列功能障碍的临床综合征[1]。临床上大多采用牵引、推拿等中医方法治疗颈椎病。颈椎牵引的原理是利用外力牵拉脊柱颈段及相关组织结构,使椎间孔和椎间隙增大的同时,减轻椎间盘压力,恢复颈曲,缓解神经、血管的压迫,缓解肌肉痉挛和疼痛[2],是目前有效治疗颈椎病的方法之一。
国内市场上的颈椎牵引装置大多是在单一方向上对颈椎进行力量牵引,采用固定的垂直颈牵模式,只能起到缓解颈部肌肉痉挛的作用,疗效差,满足不了颈椎生理功能的需要。本研究介绍一种新型多功能颈椎牵引椅的设计,它在常规颈椎牵引基础上增加了对角度的控制,不仅对颈椎进行力量牵引,还增加了颈部左右摆动和前后倾角的动作,医生可以根据不同患者的情况选择不同功能,进行牵引力量、牵引时间、牵引角度的组合治疗。角度牵引符合颈椎的生物力学特性[3],可以将颈椎的生理曲度和颈椎内外的动态平衡调节到有效范围内,提高颈椎病的治疗效果。
2 颈椎牵引角度研究进展
牵引力量、牵引时间、牵引角度是颈椎牵引中最重要的三个参数,近年来,关于颈椎牵引角度的研究非常多,结论也各有不同。
陈禾丽[4]研究表明最大应力的位置和牵引角度有关系,牵引角度小时,最大应力位置靠近颈椎上段,随着牵引角度增大最大应力位置逐渐下移。倪国新[5]观察 X射线片后研究发现,15°~20°前屈位牵引时,牵引力与颈椎运动轴心一致,符合力学要求,治疗效果优于垂直牵引。陈完伟[6]认为椎动脉型适合采用5°以下角度进行牵引治疗,脊髓型采用颈后仰10°~15°角度牵引,神经根型宜采用颈前屈20°~30°牵引等。伍忠东[7]根据临床实验总结出:正常生理曲度(12±5)mm适合采用5°~15°的牵引角度,颈椎反弓应采用 -15°~- 5°的牵引角度,颈椎曲度变直(0~6.9 mm)适合- 5°~5°牵引角度。
角度牵引对参数的要求非常严格,选用不适当的牵引角度会对患者的病情产生不利影响。医生在治疗过程中必须对患者病情进行认真分析,对照患者颈椎的X射线片,综合考虑患者病变部位及颈椎病类型,采用最佳牵引角度、牵引力量和牵引时间进行治疗。
3 系统的总体设计
多功能颈椎牵引椅由机械系统 (头部卡板、座椅、牵引立柱、颈牵执行机构等) 、 电气系统 (数据采集模块、显示模块、驱动模块、急停装置) 两部分组成。其主要性能参数根据患者病情及临床需求等因素确定。
3.1 机械系统
多功能颈椎牵引椅由A 头部卡板、B倾角执行机构、C座椅、D牵引立柱、E颈牵执行机构、F摆角执行机构组成。
其中A 头部卡板用于对患者头部进行固定,卡板的宽度可根据患者头部大小调节;B倾角执行机构中主要包括倾角传感器和倾角电机,完成颈椎的倾角功能;D牵引立柱采用可调节高度的机械杆,以满足各种不同身高患者的要求; E颈牵执行机构主要包括力量传感器和牵引电机,完成颈椎的力量牵引;F摆角执行机构主要包括摆角传感器和摆角电机,完成颈椎的摆角功能。各功能执行机构都具有机械限位功能,保证整个治疗过程的安全可靠。
多功能颈椎牵引椅机械图见1。

图1 多功能颈椎牵引椅机械图
系统摒弃了传统钢丝绳牵引的弊端,传动机构直接作用于头部,增加了颈部的左右摆动、颈部的前后倾角功能,治疗时根据患者的实际情况进行不同力量、角度的组合,实现多方位牵引,从根本上解决颈椎病的问题。
3.2 电器系统
多功能颈椎牵引椅的电器控制部分是在ATMEGA16单片机作为主控制器的基础上,扩展了一些外围电路,包括数据采集模块、显示模块、驱动模块、急停装置。数据采集模块由颈牵拉力传感器、摆角角度传感器、倾角角度传感器以及其相对应的滤波电路、A/D转换电路组成,用于实现传感器信号的采集及调理,以便在单片机中对数据进行分析处理;显示模块由RS232串口通讯电路和触摸屏组成,用户可以通过触摸屏进行治疗模式的选择、设置治疗参数、系统校准等操作,并实时显示牵引力,界面直观,操作方便;驱动模块由继电器和颈牵电机、摆角电机、倾角电机组成,当单片机接收到控制信号后,发出动作指令,通过继电器控制各直流电机的动作,分别完成颈椎力量牵引、左右摆动、前后倾角的功能,实现对患者颈椎的组合牵引;急停装置的作用是在牵引的过程中将系统紧急复位,避免意外状况对患者颈部造成损伤。
多功能颈椎牵引椅的电器系统结构框图见图2。
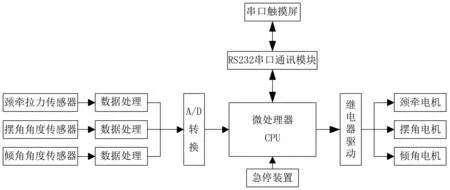
图2 电器系统结构框图
4 系统的软件设计
系统软件部分包括主控制程序、数据采集及处理程序、校准程序、牵引程序的设计。主控制程序接收串口屏发送的操作指令,并调用相应的功能函数;数据采集部分实现信号的A/D转换,并对数据进行滤波、计算等操作;校准程序实现触摸屏的校准以及系统参数的校准;牵引程序根据接收到的牵引模式和参数发出相应的动作指令。
4.1 系统主控制程序
系统上电复位之后,在主控制程序中需要对硬件进行初始化,包括外设接口初始化、定时器初始化、串口通讯设置、存储器初始化、中断初始化等操作。在初始化完成之后,系统开串口中断,然后进入主循环程序。采用循环队列的方式接收触摸屏发送来的数据,在程序中对每一帧数据进行分析,提取出功能代码和数据,对应通讯协议调用相应的功能函数。另外在主程序中定时检测颈牵拉力传感器测得的数值,以便在牵引的过程中对颈牵力量进行实时监测,实现反馈补偿。
主程序的流程图见图3。
4.2 数据采集及处理程序
数据采集模块用于采集力量、摆角和倾角信号并完成传感器信号的A/D转换。我们利用ATMEGA16内部的ADC进行采样及A/D转换,采样精度可以达到10位。ATMEGA16的内部ADC包括四个寄存器,其中ADMUX为多工选择寄存器,用于选择参考电压及模拟通道;ADCSRA为控制和状态寄存器A;ADCL及ADCH为数据寄存器,用于存放AD转换值;SFIOR为特殊功能IO寄存器。在完成ADC的相关寄存器初始化后,就可以启动A/D转换。
传感器本身的误差以及运行环境中存在的干扰源都会对数据的采集精度造成影响,系统在硬件方面采用了滤波器,并加入适当的接地和屏蔽措施,但是硬件上的措施不能完全解决干扰问题,在软件上采用平均滤波算法,以期提高数据采集的精度。

图3 主控制程序流程图
4.3 牵引程序
在初始状态下,系统各牵引机构处于零位,用户通过触摸屏设定牵引力量、牵引时间、牵引角度等参数,单片机接收到控制信号后,输出动作指令,控制相应电机的动作,同时对相应传感器信号进行采集并实时监控。
用户在触摸屏上完成模式选择及参数设置之后,系统将按照设定的工作模式运行。系统有两种工作模式,第一种首先将摆角或倾角牵拉至指定位置,然后启动颈牵电机,将颈椎牵拉至指定牵引力,在设定的保持时间内完成治疗,并将系统复位至初始位置;第二种首先启动颈牵电机,将颈椎牵拉至指定牵引力,然后在治疗保持时间范围内根据已设定次数进行摆角或倾角的间歇牵引,完成治疗后将系统复位至初始位置。
在整个治疗过程中,电机转动产生牵引力的变化,并通过传感器的数值大小反映出来,单片机将采集到的力量传感器数值与用户设定的牵引参数比对,进而调节颈牵电机的动作,达到预设数值时发出停止信号,使电机停止动作。牵引力量到达设定值之后进入牵引保持,牵引保持过程中每间隔5 s进行一次力反馈信息采集,以便补偿病人的轻微动作对牵引力量造成的改变。
5 结论
多方位颈椎牵引椅是在基于ATMEGA16单片机的硬件平台上,根据生物力学原理设计而成的,利用程序进行组合控制,可以实现颈椎力量、角度的组合牵引。系统采用高精度的传感器对牵引力、牵引角度信号进行多通道的数据采集,在牵引过程中对各牵引参数进行实时监测和精确控制,保证了系统的精度和可靠性。经专家论证和临床试验,该设备功能齐全、精度高、运行平稳可靠、操作方便,符合临床要求,具有广阔的应用前景。