新型腹腔镜手术训练系统的设计与实验研究*
2016-10-18宋成利王贤玲吕坤勇李显达赵雪松
宋成利,王贤玲,吕坤勇,李显达,赵雪松
(1.上海理工大学医疗器械与食品学院,上海 200093;2.上海世恒医学科技有限公司,上海 200093)
1 引 言
20世纪80年代以来,作为微创外科代表的腹腔镜手术在全世界范围迅速发展,较之传统开放手术,具有创伤小、脏器功能干扰轻、康复快等优点,但同时也丧失了开放手术所具有的立体视觉和触觉反馈,且设备所采集的脏器图像色彩存在不同程度的失真,尤其是将所有器械都通过脐部一个切口通道进入腹腔的单孔腹腔镜手术,手术操作的难度更大[1]。因此,针对外科医生开展腹腔镜手术技能培训显得尤为重要。腹腔镜手术训练系统是术前培训必不可少的工具。目前市场上存在的手术训练系统依据所应用的技术类型主要分为两类:手术训练箱和虚拟现实类模拟器。虚拟现实类模拟器可以近似模拟真实手术场景,有些还带有力触觉感受,但因其技术难度高、价格昂贵,难以在国内推广使用。虽然手术训练箱的成本低、利用率高,但目前市场上和各医院机构可用的手术训练箱的结构较为简单,训练任务单一,最重要的是缺少符合人因工程原则的设计,手术技能的转化效果不佳。因此,我们设计一款符合人因工程原则,同时适用于多孔和单孔腹腔镜手术训练,又可以进行干式和湿式任务训练的腹腔镜手术训练系统,并已经获得国家实用新型专利和外观专利(专利号:2014202311458和2014301213468),通过实验初步验证该训练系统对于提高多孔和单孔腹腔镜基本手术技能的有效性。
2 材料与方法
2.1 腹腔镜手术训练系统的设计思路
2.1.1训练器结构功能以及任务模块的设计 腹腔镜手术训练器外形设计以人因工程学为基础,首先根据30个成年人腹部表面尺寸,获得重要标记点之间的距离[2];同时考虑腹腔镜临床手术操作过程中,气腹形成后腹壁的扩张程度约为正常情况下的1.2倍[3-4];以及为确保腹腔镜手术操作效果,手术器械在箱体内外的长度比值(I/E)应在1:1和2:1之间,尽量接近1∶1[5]。根据以上信息确定训练器的轮廓尺寸和脐部(单孔)的位置。
腹腔镜手术中器械操作孔和腹腔镜放置孔的位置非常重要,其关系到图1所示的5个重要角度的大小,进而与腹腔镜手术的操作时间和操作效果密切关联。Hanna[6]和Meng[7]的研究指出,当操作角(图1A)为60°,仰角(图1B)在30°~60°之间,且腹腔镜与任一器械所成的方位角(图1C)相等时,腹腔镜手术所需要的操作时间最短,完成手术效果最佳。腹腔镜的光学轴心与手术器械平面(optical axis of the endoscope and the instruments' plane,OAIP)的夹角(图1D)决定了医生从显示器上观察到的手术器械如何进入手术操作区域。研究表明当腹腔镜的光学轴心与手术器械平面相平或位于其上时,显示器上显示手术器械从操作者同侧进行手术操作区域,且当OAIP角在0°~15°时,体内缝合打结任务表现成绩最优异[8]。此外,内窥镜的光学轴心与操作任务平面(optical axis-to-target view,OATV)的夹角(图1E)也会对任务操作的效果造成影响,研究表明OATV角的最佳度数为90°[5]。根据以上5个重要角度确定训练器上手术器械和腹腔镜的入口位置。
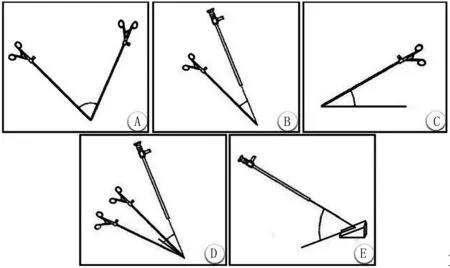
图1 腹腔镜手术中的操作角(A)、方位角(B)、仰角(C)、OAIP角(D)、OATV角(E)
训练器任务模块包括干式和湿式两大类,其中干式任务模块的设计依照McGill腹腔镜技能训练的任务模块[9-10],并结合腹腔镜手术中基本技能而定。湿式任务模块的设计是用于进行动物离体器官手术操作,训练腹腔镜手术中的高级技能。
2.1.2训练系统的台车设计 腹腔镜手术中医生的最佳操作姿势见图2A:手臂轻度外展后倾,并朝肩内方向旋转(外展角度<30°),上肢肘部屈曲角度为90°~120°,头部向前倾斜角度为15°~45°[11]。医生处于该姿势不仅可以减少肌肉骨骼损伤,还可以最大限度地保存体力,延长手术作业时间,提高手术操作效率。其中影响医生操作姿势的主要因素是手术操作平台和显示器的位置及高度。研究[12~14]表明这2个因素的最佳位置见图2B:显示器放置在医生正前方,位于手术操作平台与医生眼睛之间,最佳高度为160 cm,倾斜角度由操作者个人调节(最大倾斜角度不超过15°);手术操作平台的要求是能够满足手术中器械的把柄位置高度接近操作者的肘部。除此之外,台车应满足以下基本要求:可放置训练器、内窥镜系统、手术器械、能量发生器等;台车高度可调节,且台车可自由移动,并带有刹车安全配置。根据以上信息对训练系统台车进行结构设计。

图2 腹腔镜手术中医生的最佳操作姿势(A)与显示器、手术台的最佳位置高度(B)
2.1.3训练系统的扶镜器设计 目前市面上的腹腔镜手术训练器中大多使用数字摄像头代替腹腔镜,但考虑到摄像头存在的影像滞后问题,本研究设计的腹腔镜手术训练系统使用内窥镜系统,同时考虑到术者进行训练时需要扶镜的助手,本系统另外设计有扶镜器。对扶镜器的设计要求是一端固定在台车,一端用于固定腹腔镜,并要求当腹腔镜固定在扶镜器时,可任意调节腹腔镜的观察视野。因此,采用能完成三维运动和旋转运动,且当空间任意运动完成后又能保持运动终止时空间位置的机械臂结构。
2.2 腹腔镜手术训练系统的组成
本研究所设计的腹腔镜手术训练系统(上海世恒医学科技有限公司)主要由腹腔镜手术模拟训练器、台车和显示器以及扶镜器组成。见图3。
2.2.1训练系统的训练器 根据测量的30名成人腹部表面尺寸及腹腔镜手术中人因工程原则最终确定训练器的尺寸为480 mm×360 mm×240 mm,训练器的上盖表面形态采用与气腹形成后的腹部相似弧面以及参考蛋的外形,使其更好地模拟气腹状态,给医生更直观的术中感受。另外,训练器的上盖两侧采用凹凸的波浪状的纹理,起到防滑作用,使得上盖的开合更为便捷。图4A是训练器的外形展示。
训练器表面首先设计了2个用于多孔腹腔镜手术训练的操作孔,孔的位置使得器械满足手术中的最佳角度。由于训练任务处于视野中心时,显示器所呈现的图像清醒度和亮度更高,以此作为器械操作的范围。通过综合考虑方位角、OAIP角以及OATV角对手术任务操作效果的影响,最终选择操作角60°、方位角30°、仰角45°、OATV角65°、OAIP角10°,从而确定操作孔和腹腔镜的入口位置(图4B)。这是针对单人操作所做的设计,而针对一些需要双人配合操作的相对复杂手术,在训练箱两侧还设计了两组用于团队训练的双人操作孔。同时还在训练器上的脐部位置设计了用于单孔腹腔镜手术训练的操作孔;在训练器的中间部位设计用于胸腔镜手术训练的两组操作孔;在训练器的最前端设计用于提供肠道吻合手术训练的开口,可以配备直径为28 mm的插管和电刀盒,进行相应湿式任务训练(图4C)。其中所有的多孔孔道外表面都粘有中间刻有十字形的橡皮圈,便于使用套管式时增加其灵活性。

图3 腹腔镜手术训练系统的组成 A.显示器;B.台车;C.扶镜器;D.训练器
2.2.2训练系统的台车 根据腹腔镜手术中医生的最佳操作姿势以及符合人因工程原则的显示器和手术操作平台的最佳位置高度,最终确定了训练系统台车的结构和尺寸(图3B)。其中操作平台尺寸为500 mm×50 mm,用于放置训练器;台车配备升降系统,操作平台的高度范围为80~100 cm,显示器放置的高度范围为160~180 cm,前后倾斜角度为±30°。另外,台车的整体重量为30 kg,可承重15 kg。底部有4个轮子,可自由移动,同时带有刹车结构。
2.2.3训练系统的扶镜器 如图3C所示,训练系统的扶镜器采用球关节与连杆相结合的机械臂结构,主要由紧固件机械臂和定位钮3部分组成。其中紧固件固定在台车的指定位置,定位钮用于固定腹腔镜。
在扶镜器的结构中,机械臂与紧固件之间以及机械臂和定位钮之间都是采用球关节,使得连接杆可做空间旋转运动,从而调节腹腔镜的空间位置和倾斜角度。当球关节不动时,通过调节连杆之间的夹角可以调节腹腔镜的空间位置和倾斜角度;当球关节和连杆都不动时,通过定位钮来固定和松弛腹腔镜,也可调整腹腔镜深入腹腔内的距离,调节腹腔镜的视野。
2.3 任务模块的使用及训练目的
训练过程中,腹腔镜手术训练器能够提供干式和湿式两大类任务模块,帮助受训者掌握基本和复杂腹腔镜手术技能。干式训练任务包括以下4种:(1)拾取与转移,训练其眼手协调能力(图5A);(2)穿过,训练其双手协调能力和空间三维识别能力(图5B);(3)定向,训练其夹持力(图5C);(4)缝合打结,腹腔镜手术中的缝合打结是最难掌握的一项基本技能,该任务模块采用硅胶材料模拟人体组织,帮助受训者掌握这一技能(图5D)。湿式训练任务是通过将动物离体器官放置到背面贴有负极片的电刀盒上,可以练习实际手术操作,如胆囊切除手术(图5E)、肺叶切除手术等。另外,通过训练器底板后面的插口可以进行肠道吻合手术(图5F)。
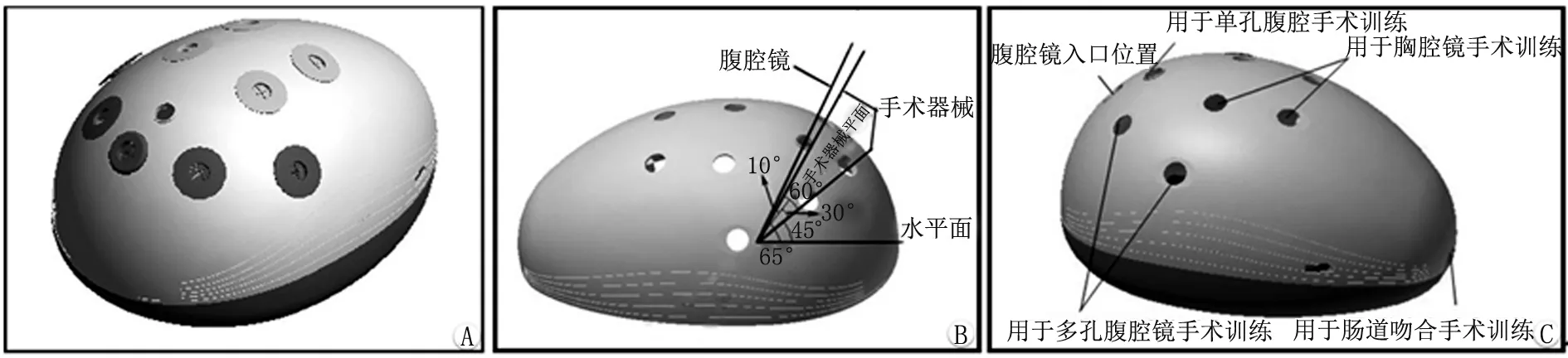
图4 腹腔镜手术训练器的外形(A)、重要角度(B)以及操作孔的设计(C)

图5 训练器四项干式训练任务模块和两项湿式训练任务
2.4 实验验证
本研究的受试者为12名无腹腔镜手术经验的医学相关专业学生(10男2女),年龄为(23.5±1.6)岁(22~28岁),所有受试者矫正视力良好(1.2以上)且是右利手,通过让12名受试者依次抽取标有0或者1的签,从而随机平均分为A(n=6)、B(n=6)两组,使用上述设计的腹腔镜手术训练系统分别以多孔和单孔操作的方式练习三项基本任务:“拾取与转移”、“穿过”、“缝合打结”。受试者连续9天接受训练,每天练习一遍上述任务。记录受试者每次完成任务的时间,比较训练前后两组的成绩。
2.5 数据分析
3 结果
2组无腹腔镜操作经验的学生在接受连续9天培训后,完成“拾取与转移”、“穿过”、“缝合打结”三项任务的培训后用时比培训前均明显缩短,差异有统计学意义(P<0.01),见表1。

表1 受试者训练前后完成任务用时(min)结果比较
4 讨论
随着腹腔镜在外科手术中的广泛应用,腹腔镜培训手段也逐渐得到重视。国内外研究表明腹腔镜模拟培训可以使医生更快掌握手术技能,缩短手术时间,减少并发症[15-17]。腹腔镜手术训练系统是医生获得手术技能的有效途径。目前,国外市场供应的腹腔镜手术训练箱价格昂贵,难以普遍推广应用。而国内市场的手术训练器虽价格相对低廉,但存在诸多缺点,如:结构简单,缺乏临床真实感,只针对传统腹腔镜手术的单人训练等等。本研究设计的腹腔镜手术训练系统的价格范围为5~10万元RMB,根据医生和用户的需求进行个性化定制,提供不同的配置和价格以适合不同层次的医学培训需求,因此,可以被大多数医院以及研究所接受。
相比于目前市面上的腹腔镜手术训练系统,本研究设计的产品具有以下优点:(1)基于人因工程理念设计的训练器整体能给医生更接近临床实际的手术感受。其中,基于最佳操作效果的操作孔和腹腔镜入口位置设计为医生掌握最佳的手术技巧提供了可行性,双排操作孔的设计体现了腹腔镜手术双人配合的理念,可以进行团队操作训练;同时增加了胸腔镜手术训练的操作孔和肠道吻合手术的开口。(2)干式任务模块的设计能够帮助医生掌握腹腔镜手术最基本的技能,如:眼手协调、双手协调,三维空间深度感知能力和基本手术操作技能;湿式任务模块可以训练掌握高级技能,进行动物离体实验。(3)基于手术操作过程中医生的最佳操作姿势设计的台车带有自动升降系统和刹车系统,可以帮助医生保持最佳手术操作姿势,最大限度保存体力,延长作业时间。(4)采用内窥镜系统代替以往的摄像头,更加增强了手术模拟的真实感,解决了摄像头的影像滞后问题。(5)扶镜器的设计使得医生可以按照自己的意念,方便地调整腹腔镜的观察视野,操作简单,安全可靠,并且降低劳动强度,缩短手术时间。最后整个腹腔镜手术训练系统组装简单,使用方便,便于医生随时随地进行训练。
调查显示,腹腔镜手术者手术技能的训练效果、经验与腹腔镜手术并发症的发生率密切相关[18]。因此,腹腔镜手术技能模拟训练是非常必要的,只有进行严格的镜下操作技能训练,才能为成功开展腹腔镜手术打下良好基础。实验结果初步证明,本研究设计的腹腔镜手术训练系统是帮助医生掌握基本手术技能的有效方法,同时该训练系统也为评价新研发的微创外科手术器械和设备提供了一个有力平台,如:多自由度器械和单孔平台以及手术机器人,在临床评价之前,研发人员可以通过首先在训练器上进行实验评价继而优化改进,从而降低研发成本。
