基于电感模型的高压比例电磁阀无传感器位置检测
2016-10-17蔡胜年林春爽
蔡胜年,林春爽,梁 禹
(沈阳化工大学信息工程学院,辽宁 沈阳 110142)
基于电感模型的高压比例电磁阀无传感器位置检测
蔡胜年,林春爽,梁禹
(沈阳化工大学信息工程学院,辽宁 沈阳 110142)
介绍一种基于电感模型的氢气燃料电池汽车用高压比例电磁阀无传感器位置检测的方法,此方法以比例电磁阀的非线性模型为基础,适用于计算或者监测比例电磁阀工作过程中移动铁心的实时位置。经过仿真分析和数学推导,构建出电磁阀的电感模型以及移动铁芯位置检测的计算模型。再对计算模型进行实用性验证实验,结果显示其最大误差在10%以内,符合工程实际应用。该方法简单实用,易于实现,适用于计算或者监测高压比例电磁阀工作过程中移动铁心的实时位置。
电磁阀;无传感器;电感;位置检测
0 引 言
随着汽车保有量的增加,由此带来的能源危机和环境污染也在加剧[1]。因此,以氢气燃料电池汽车为代表的新能源汽车越来越受到重视。而提高系统可靠性,降低故障率是目前氢气燃料电池汽车面临的主要问题之一。氢气燃料汽车用比例电磁阀的位置检测环节是氢气控制系统电磁阀故障检测及氢气消耗量控制系统的重要组成部分,传统上通常采用加装传感器的方法对电磁阀移动铁芯位置进行检测,所以,传感器性能的优劣直接决定了测量准确度及可靠性。然而,安装传感器不仅占用空间,增加系统重量和成本,还会限制高压氢气电磁阀的应用范围。目前无传感器位置检测技术被广泛用于直流电机及永磁电机的位置检测[2-3],如磁链估计法、反电势检测法、相电流法等。这些方法受外界干扰大,成本高,且不能直接用在高压氢气电磁阀移动铁芯的位置检测中。所以,到目前为止无传感器位置检测技术在高压氢气电磁阀上的应用还不多见,国内外相关的研究成果也较少。综上所述,本文介绍了一种基于电感模型的高压氢气电磁阀的位置检测方法,这是一种间接的位置检测方法,具有经济性好,精度高,成本低,故障率低,可靠性高等优点,表现出广泛的应用前景。
1 高压氢气比例电磁阀结构
图1为高压氢气电磁阀电磁执行器结构简图。

图1 高压氢气电磁阀电磁执行器结构
其工作原理是:当线圈断电时,在弹簧力的作用下,移动铁芯密封住阀体孔径,此时出气口没有气体输出。当线圈通电时,移动铁芯在电磁力的作用下克服弹簧力向上运动,打开阀体孔径,电磁阀处于快速打开进入大量输出氢气阶段。
2 电感模型的推导
高压氢气电磁阀电感的大小在很大程度上影响着高压氢气电磁阀的动态性能[4],根据机电能量转换理论可知,高压氢气电磁阀属于单边励磁的机电能量转换系统,其电感量的大小不但与磁路结构、非线性导磁材料、驱动电流大小有关,而且还与移动铁芯的位移、磁路饱和程度等因素有关[5]。
本文主要研究高压氢气电磁阀吸合过程中移动铁芯位置变化与电感的关系,因此主要分析电磁阀吸
合过程,其电感模型建立如下:
电压平衡方程式:
式中:R——线圈电阻,Ω;
U——线圈电压,V;
i——电流,A;
φ——线圈电流i和移动铁芯的位移量x的函
数,Wb。
对于软磁材料,磁链不仅与动铁芯位置有关,在考虑磁感应强度和磁场强度(B-H)非线性特性基础上,还与电流有关,也就是说φ为线圈电流i和移动铁芯的位移x的函数。即:

将式(2)代入式(1)中展开后得

高压氢气电磁阀的磁链可以用电感和电流的乘积表示:

由式(3)、式(4)可以得出:

式中右边第1项表示电阻上消耗的电压降;第2项表示由于电流变化而引起的感应电动势;第3项为由于高压氢气电磁阀阀芯运动而引起的运动电动势。由上式可得:

式中:Ld——动态电感(也称瞬时电感),H;
Ls——静态电感,H。
式(6)为计算的最终模型。
3 基于电感的无传感器位置检测技术
3.1无传感器位置检测原理
将动态电感与静态电感带入电磁阀电压平衡方程(5)中,式中右边第1项为电流变化引起的感应电动势,第2项是由阀芯运动引起的运动电动势。当检测到驱动电流i之后,式(5)变形为

式中V为电磁阀阀芯速度。
由式(7)可知,运动反电动势部分对电路的影响可以等效于在绕组中串联一个电阻R′,可表示为
利用理想电感特性曲线的关系可以得到电感上升斜率为

高压氢气电磁阀中的最大电感 Lmax=1.016H,最小电感 Lmin=0.2098H,移动铁芯位移 x0=2.3mm。则阀芯速度为20mm/s时,R′≈0.48Ω,因此相对线圈阻而言可以忽略不计。那么式(7)可简化为

3.2基于电感模型的无传感器位置检测
3.2.1动态电感Ld(x,i)的求解
通过利用Ansoft Maxwell软件对不同位移及激励电流下比例电磁阀进行分析,计算高压氢气电磁阀电感的静态参数[6-7]。得到其吸合过程中电感矩阵随位移、电流变化的曲线如图2所示。
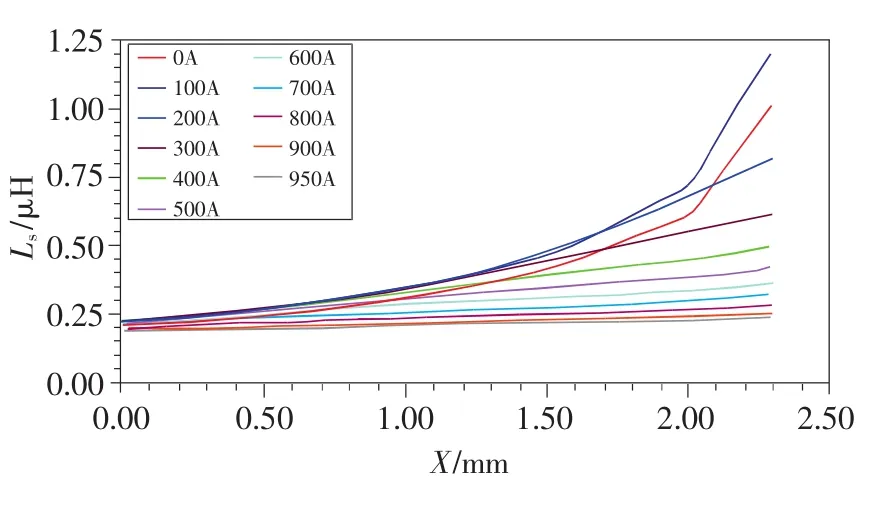
图2 电感矩阵随位移、电流变化的曲线
由图中可以发现,在移动铁芯吸合运动过程中,电感随着位移的增大而增大,随电流的增大而减小。为便于实时计算,运用Matlab的曲线拟合功能对曲线进行拟合[8-9]。得到不同电流下的电感和位移曲线,并针对不同电流情况下的电感和位移关系建立对应的函数关系式如下:

再对系数值A、B、C、D分别做曲线拟合如图3所示。
可以通过Matlab最小二乘拟合功能得到系数随电流变化的关系式:

再将得到的各系数表达式带入电感与位移的关系式(11)中,从而得到静态电感Ls与位移的关系式。
将静态电感Ls(x,i)代入(6)式中,得到动态电感Ld(x,i)关于位移x和电流i的的函数关系式为

式中A′、B′、C′、D′分别为电流i的函数,同式(12)。

图3 系数曲线
3.2.2电流i和电流变化率di/dt的求解
由式(7)可知,动态电感随激励电流斜率di/dt的变化而变化,若以激励电流的斜率di/dt取代动态电感值di/dt,则在获得电磁阀电流i与电流斜率di/dt的情况下,可以推测出阀芯的位移x。
根据式(7)可以建立位移和激励电流斜率di/dt的数学模型,由高压氢气电磁阀驱动电路中检测到的电磁阀线圈电压,线圈电流的变化斜率以及电磁阀所处的环境温度T,经过各相关环节及温度补偿后可以计算出电磁阀移动铁芯所处的具体位置。在Ansoft瞬态仿真结果中得到启动过程中线圈电流随时间变化的关系曲线,如图4所示。
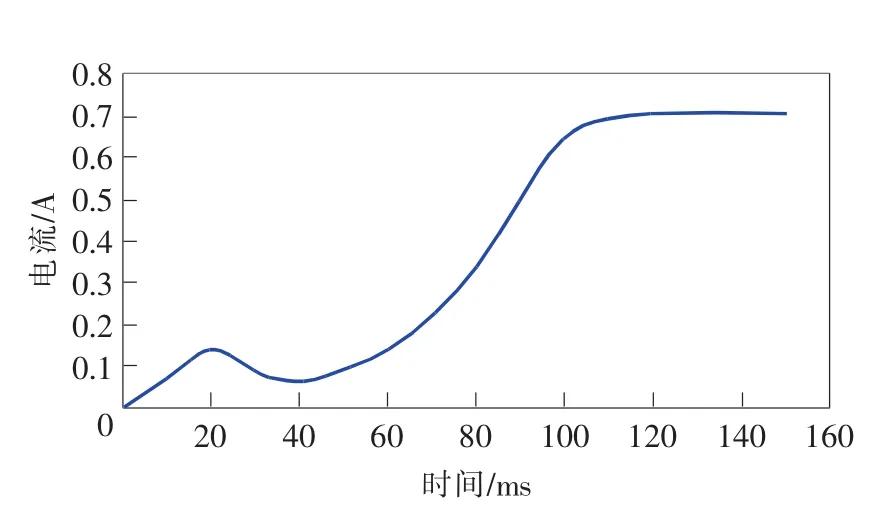
图4 线圈电流随时间变化曲线
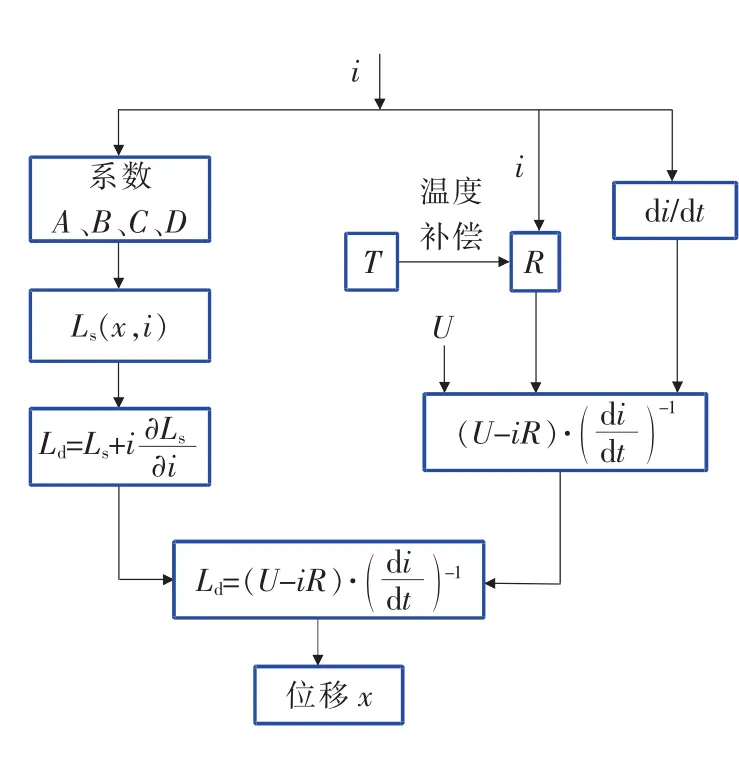
图5 高压氢气电磁阀移动铁芯位移计算框图
对该实测电流进行采样,得到第K时刻和K+1时刻的采样电流i和iK+1,时间间隔为Δt,则求出电流变化量为di/dt,联合式(10)~式(13)求得位移x,从而实现高压氢气电磁阀的无传感器位置检测。其流程图如图5所示。
3.3高压氢气电磁阀非线性建模
电磁阀的状态方程如下述所示:

式中:x——移动铁芯位移,mm;
ν——移动铁芯速度,mm/s;
m——移动铁芯质量,kg;
Fm——电磁吸力,N;
K——弹簧系数,N/m;
a0——弹簧预压缩量;
b——阻尼系数;
Ld——动态电感,H;
Ls——静态电感,H。
根据式(14)~式(16)可以在Simulink仿真平台上搭建高压氢气电磁阀的非线性模型[10]。将电磁阀各参数带入到模型中,并限定电磁阀移动铁芯位移小于2.3mm。
4 仿真研究与结果分析
利用高压氢气电磁阀非线性仿真模型,可得出比例电磁阀在一定驱动频率下的电流、位移随时间的变化曲线,如图6所示。

图6 比例电磁阀阀芯位移、电流与时间关系曲线
在高压氢气电磁阀非线性仿真模型及式(10)~式(13)的基础上,根据图7的无传感器位置检测的原理图对电磁阀进行无传感器位置检测。其结果如图8所示。
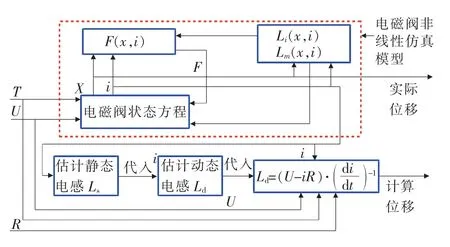
图7 高压氢气电磁阀无传感器位置仿真框图

图8 高压氢气电磁阀无传感器位置检测仿真曲线
其中计算位移是由基于电感模型的无传感器位置检测模型得到的,而实际位移信号是由高压氢气比例电磁阀非线性模型得出的。
通过实验验证了基于电感模型的无传感器位置检测技术,克服了有传感器位置检测的弊端,基本实现了对阀芯位移的检测,最大误差在10%之内,适合工程应用。而误差主要是由计算模型不够精确造成的,如忽略了运动电动势、磁性材料磁化曲线对阀芯位移的影响等因素。此外,实际电磁阀的材料属性、仿真时设置的差别、实际加工准确度、实验室的环境温度以及电压源的脉动量等因素,都会给实验带来误差。而且在数据测量时,仪器本身的准确度也会对测量结果产生影响。所以,采用改进电磁阀电感及阀芯位置计算模型,考虑运动电动势的影响,选择合适的磁性材料等方法都可以进一步提高模型计算精度,减小误差,从而提高实用性能。
5 结束语
本文将无传感器位置检测技术应用于高压比例电磁阀移动铁芯位置的检测。详细介绍了基于电感模型的无传感器位置检测的方法,搭建出了无传感器位置检测的计算模型,为高压比例电磁阀移动铁芯位置的检测提供了理论依据和实现方法。既克服了传统依靠传感器进行位置检测的弊端,又降低了维护成本,从而提高了燃料电池汽车的可靠性和实用性。
[1]曹静,王宏雁.氢能源汽车的发展现状及趋势[J].汽车研究与开发,2005(12):6-10.
[2]周素莹,林辉.无位置传感器的开关磁阻电机转子位置检测技术[J].电气传动,2006,36(2):8-16.
[3]吴春华,陈国呈,孙承波.一种改进的无刷直流电机无位置传感器检测技术[J].电气传动自动化,2005,27(3):31-33.
[4]杨振坤.电感测试法在位移测量中的应用[J].实用测试技术,1999(4):24-25.
[5]蒋涛.基于动、静态电感特性的开关磁阻电机非线性磁参数模型[J].微电机,2010,43(6):20-23.
[6]贺开华.空心圆柱线圈电感计算方法的比较[J].船电技术,2006(6):41-43.
[7]刘泽远,王世山,邓智泉.三维有限元法求解无轴承开关磁阻电机电感[J].电机与控制学报,2009,13(5):708-714.
[8]杨涛,薛小军,韦力.基于Matlab的开关磁阻电机非线性模型仿真研究[J].电子科技,2007(6):43-46.
[9]胡庆婉.使用Matlab曲线拟合工具箱做曲线拟合[J].电脑知识与技术,2010,21(6):71-76.
[10]郭训华,邵世煌.Simulink建模与仿真系统设计方法及应用[J].计算机工程,2005,31(22):127-129.
(编辑:徐柳)
Sensor-free position detection of proportional solenoid valves based on inductance model
CAI Shengnian,LIN Chunshuang,LIANG Yu
(College of Information Engineering,Shenyang University of Chemical Technology,Shenyang 110142,China)
A sensor-free position detecting method is introduced to test high-pressure proportional solenoid valves for hydrogen fuel cell vehicle based on an inductance model.This method can be applied to monitor the real-time positions of movable cores in the working process of proportional solenoid valves in accordance with a nonlinear model for proportional solenoid valves.Moreover,an inductor model for proportional solenoid valve and a calculation model for detection of movable core positions are established with the results of simulation and mathematical derivation.The availability of the calculation model is verified through practical tests as well.The experimental results show that the maximum detection error is within 10%,conforming to practical engineering application.This method is simple,practical,easy to implement,and can be used to calculate or monitor the real-time positions of proportional solenoid valves.
solenoid valve;sensor-free;inductance;position detection
A
1674-5124(2016)03-0059-05
10.11857/j.issn.1674-5124.2016.03.014
2015-07-19;
2015-08-12
蔡胜年(1957-),男,江西乐平县人,教授,博士,主要从事电磁技术应用方面的研究。
