变磁化方向单元组合式永磁吸附装置优化设计
2016-10-14闫晨飞孙振国张文增
闫晨飞 孙振国,2 张文增 陈 强,2
(1.清华大学先进成形制造教育部重点实验室 北京 100084 2.浙江清华长三角研究院 嘉兴 314006)
变磁化方向单元组合式永磁吸附装置优化设计
闫晨飞1孙振国1,2张文增1陈强1,2
(1.清华大学先进成形制造教育部重点实验室北京100084 2.浙江清华长三角研究院嘉兴314006)
在永磁吸附装置设计理论的基础上,提出并实现了一种变磁化方向单元组合式永磁吸附装置。该装置由若干磁化方向不同的永磁体紧密排列而成,不同磁化方向首尾相连构成环形。采用有限元法对新型永磁吸附装置进行了参数化建模、结构特性分析、磁路仿真、吸附力计算和结构参数优化。试制了相同材料和体积的新型和Halbach型永磁吸附装置,测定了单位质量吸附力与气隙厚度的关系曲线。实验结果表明,与Halbach型永磁吸附装置相比,新型永磁吸附装置的单位质量吸附力平均增加了1倍,最大增幅达2.3倍。
永磁吸附装置磁路设计磁路仿真参数优化Halbach阵列
0 引言
随着材料技术的发展,永磁体的性能越发优良,得到了广泛应用[1,2]。永磁吸附装置是永磁体应用中十分重要的一类,主要应用于爬壁机器人、永磁吸盘、磁性夹具、起重装置、永磁接触器[3]等。永磁吸附装置对铁磁材料的吸附能力优于真空吸附装置。与电磁吸附装置相比,永磁吸附装置重量和体积更小,无需电源和冷却设备,没有意外断电失去吸附力的安全隐患[4,5]。因此,永磁吸附装置具有广阔的应用前景。
为最大限度发挥磁性材料性能[6],减小装置整体质量,需要对永磁吸附装置的磁路进行优化设计[7],以聚集尽量多的磁场[8],增加其单位质量所提供的吸附力。文献[9]提出了一种永磁体按矩形阵列安装在轭铁上、相邻永磁体磁化方向相反的永磁吸附装置,采用有限元法进行磁路仿真并计算单位质量吸附力,对结构参数进行了优化。文献[10]提出了一种类似的永磁体安装在轭铁上的永磁吸附装置,并采用有限元法分析了其结构特性。这两种永磁吸附装置均可以提供较大的吸附力,但是较大质量轭铁的使用,限制了单位质量的吸附力。Halbach永磁体阵列[11-13]能够在永磁体的一侧汇聚磁感线,在另一侧减弱磁感线,从而无需轭铁就能获得比较理想的单边磁场[14]。文献[15]将Halbach阵列运用到爬壁机器人永磁吸附装置中,并使用有限元法优化其结构参数,有效增大了单位质量吸附力,但该装置漏磁通较多,磁路设计上仍有较大的优化空间。
本文在Halbach型永磁吸附装置的基础上,研究了永磁吸附装置的设计理论,并基于设计理论提出了一种变磁化方向单元组合式永磁吸附装置,介绍了其基本结构及工作原理,采用有限元法研究分析其特性并优化了结构参数,仿真计算与实验结果表明:新型永磁吸附装置能显著提高单位质量的吸附力。
1 设计理论
优化目标是永磁吸附装置单位质量产生的吸附力最大,因此目标函数为
(1)
式中,Fm为吸附力,N;m为永磁吸附装置质量,kg。
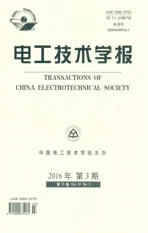
为了指导实际设计,首先研究一个理想模型。假设理想模型仅由一个半圆柱形永磁体组成,其横截面中的磁感线分布如图1所示。
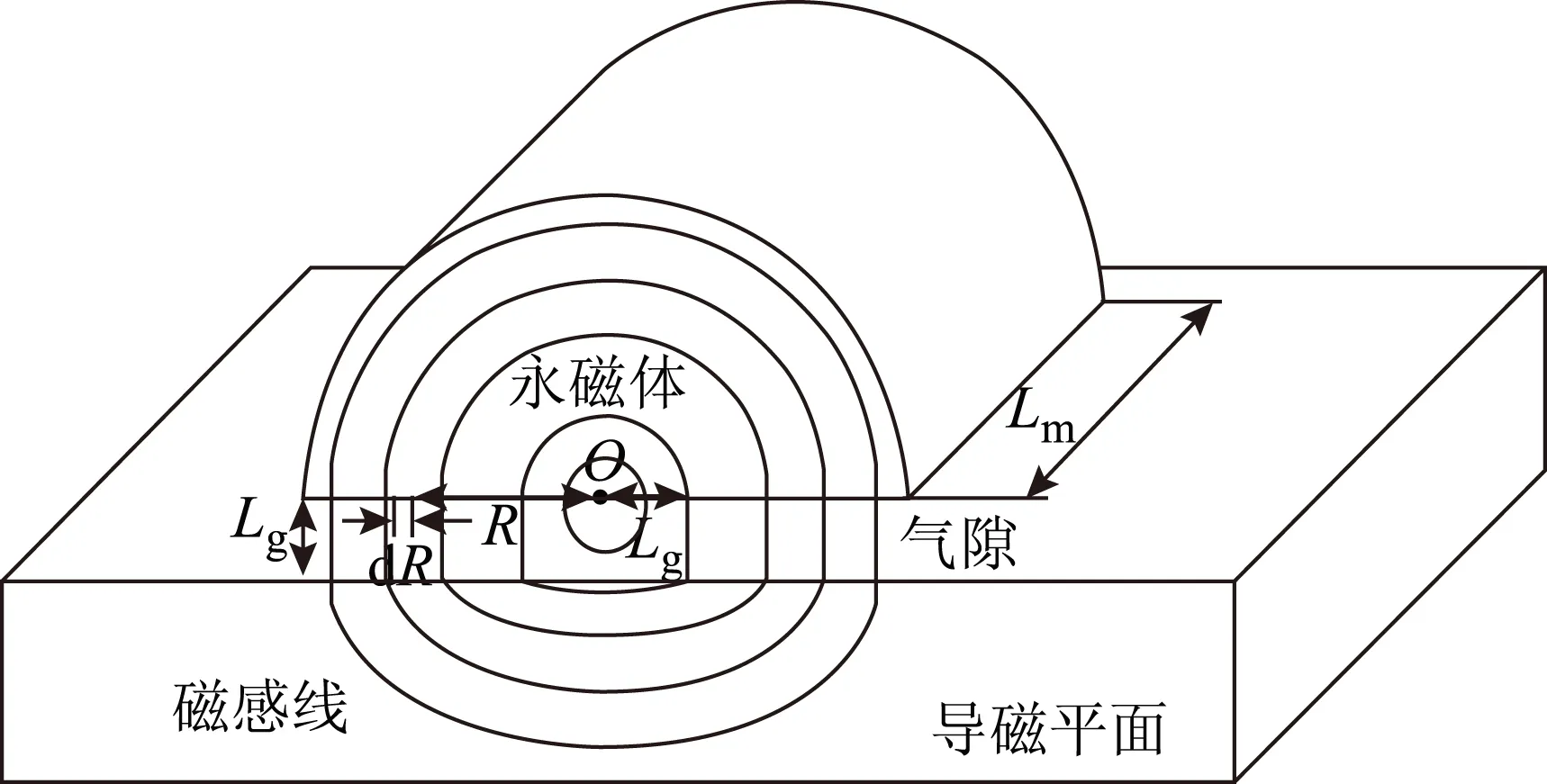
图1 理想模型横截面磁感线Fig.1 Magnetic induction lines in the cross section of the ideal model
从图1可以看出,磁感线从内至外可以分为许多薄层。设永磁体的轴向长度为Lm,某一薄层的半径为R,厚度为dR;气隙厚度为Lg;该薄层中永磁体内部磁感应强度和磁场强度分别为Bm和Hm,气隙中磁感应强度和磁场强度分别为Bg和Hg。
该薄层中磁通量守恒,因此有
BmLmdR=BgLmdR
(2)
对于该薄层中的环路,根据安培环路定理得
πRHm=2LgHg
(3)
式(2)除以式(3)得
(4)
在气隙中,Bg=μ0Hg,代入式(4)中得

(5)
稀土永磁材料NdFeB[16]具有优异的磁学性能,磁能积大、稳定性高、工作温度范围大、韧性较强,现已被广泛使用。因此,本研究中使用稀土永磁材料NdFeB,其退磁曲线表达式为
Bm=Br-μrecμ0Hm
(6)
式中,Br为剩余磁感应强度,T;μrec为相对回复磁导率。
(7)
式中,Hcb为矫顽力,kA/m。
联立式(2)、式(5)~式(7)得
(8)
该薄层产生的吸附力为
(9)
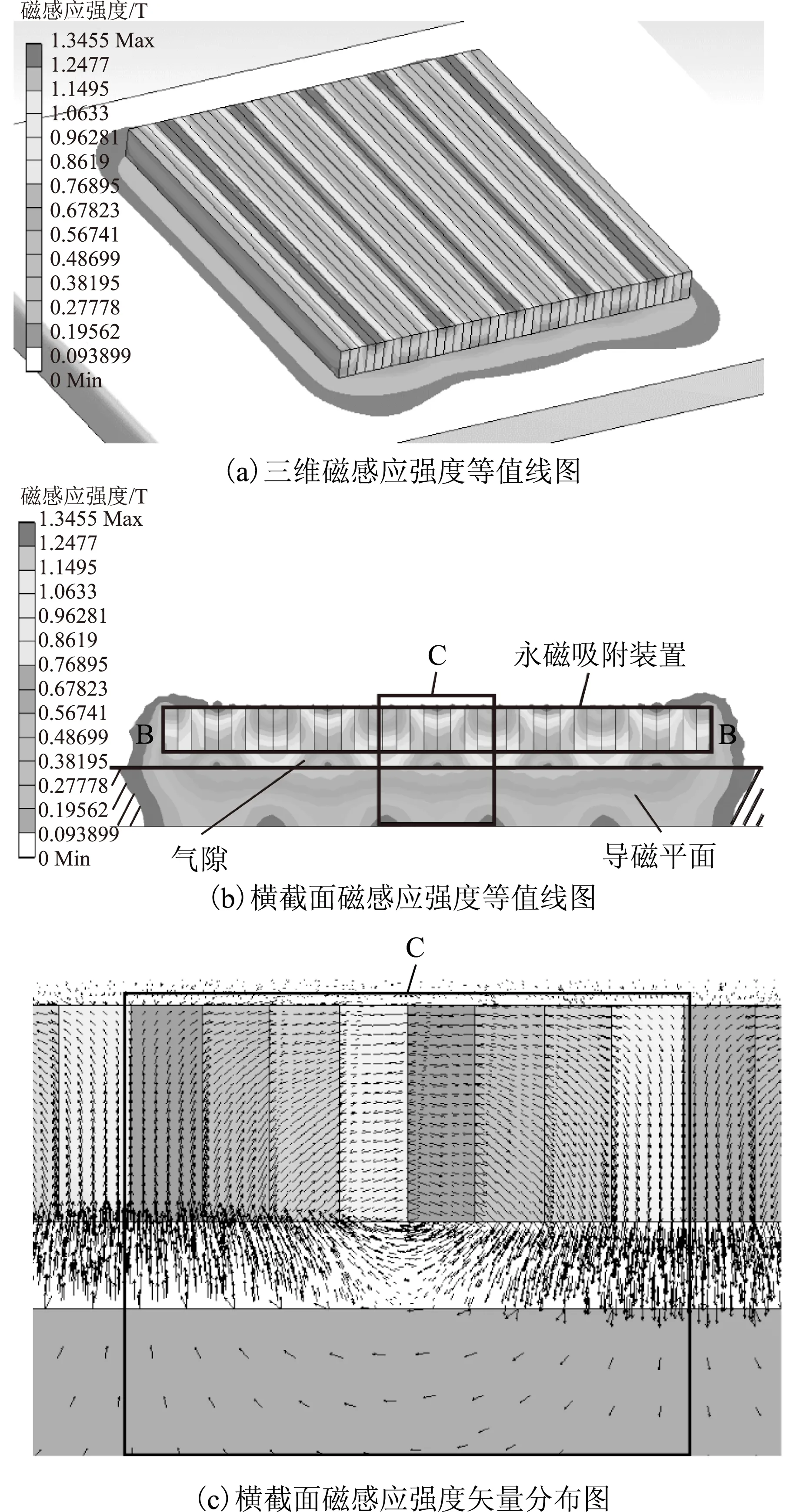
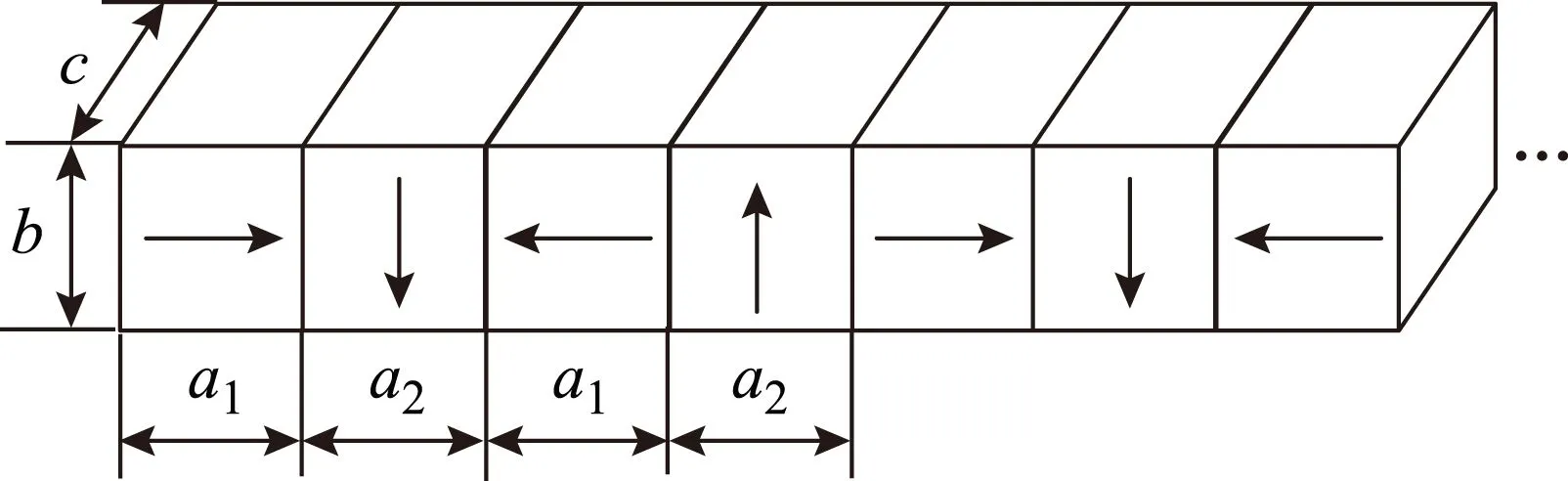
当R (10) 单位质量吸附力为 (11) 倘若轭铁被用在磁路中,由于轭铁的相对磁导率μyoke很大,其磁场强度Hyoke=Byoke/μyoke≈0,因此式(2)~式(10)均保持不变。然而,轭铁引入了自身质量myoke,导致其单位质量吸附力 (12) 式(12)表明使用轭铁会减小单位质量吸附力,应尽量避免使用轭铁。 2.1基本结构 理想模型中的磁感线形状规则、分布合理,使得其被充分利用以产生吸附力。虽然现实中理想模型并不存在,但是倘若实际模型足够接近理想模型,则实际模型的磁感线仍然会有较为规则的形状和合理的分布。将理想模型离散化,考虑漏磁等因素后加以变形,得到本文提出的变磁化方向单元组合式永磁吸附装置,其基本结构如图2所示。 图2 变磁化方向单元组合式永磁吸附装置基本结构Fig.2 Basic structure of the variable-magnetization-direction and combined permanent magnetic adhesion device 每块永磁体均为长方体。在空间直角坐标系O-xyz中,约定平行于x、y、z轴的棱分别为宽、长、高。所有永磁体长度均为Lm,高度均相等,沿x轴紧密排列,沿y、z轴对齐。图2中的箭头表示永磁体的剩余磁感应强度矢量Br,其方向即为磁化方向。所有Br均平行于xOz平面,与x轴成不同夹角。相邻的n块永磁体的Br按一定规则排列,构成一个组成单元(n≥2,图中以n=4为例)。永磁吸附装置含有N个组成单元。 Br和永磁体宽度按如下规则设置:在每个组成单元中,以+x方向为角度基准,以顺时针为角度正方向,角度范围[-90°,270°],沿+x方向第i(i=1,2,…,n)块永磁体的宽度Wi以及Br与+x方向的夹角θi满足式(13)~式(16)。 (13) i↑⟹θi↑ (14) (15) Wi=Wn-i+1 (16) 任意相邻两个组成单元接触面两侧的Br对称分布,即任意相邻两个组成单元相互排斥。 2.2工作原理 在永磁吸附装置的磁路中,永磁体、导磁平面以及两者之间的气隙构成闭合回路,其中的磁通为主磁通,其他区域中的磁通为漏磁通。漏磁通会引入额外的磁阻,导致主磁通中的磁感应强度减小,从而使吸附力减小。 不失一般性,以n=4,N=2为例,变磁化方向单元组合式永磁吸附装置横截面磁感线分布如图3所示。在每个组成单元中,式(13)~式(16)使得Br首尾相连构成近似于环形的多边形。由于永磁体具有很大的矫顽力,对磁感线有很强的约束作用,故磁感线会大致沿着Br形成类环形,其上半部分穿过组成单元,下半部分穿过气隙和导磁平面。如此便使得新型永磁吸附装置接近于理想模型。当然,仍有少数磁感线溢出到另一侧的空间(如图3中A区域所示),从而引入额外的磁阻。组成单元的永磁体数量n越大,磁感线越逼近于环形,A区域所占比例越小,引入的磁阻越小,从而单位质量吸附力越大,并逐渐趋于极限值。 图3 N=2,n=4时新型永磁吸附装置磁感线Fig.3 Magnetic induction lines of the novel permanent magnetic adhesion device when N=2,n=4 新型永磁吸附装置的侧面存在漏磁通,如图3中B区域所示。将不同组成单元紧密排列可以减少此部分漏磁通,使更多的磁感线聚集在主磁通中。同理,沿y轴的侧面也存在漏磁通。任意相邻两个组成单元接触面两侧的Br对称分布使得各个组成单元的磁感线各自形成闭合回路,不同组成单元的闭合回路不相交。N越大,Lm越大,则侧面漏磁通所占比例越小,单位质量吸附力越大,逐渐趋于极限值。 3.1有限元分析基本参数 由于永磁吸附装置磁路复杂,难以建立精确的数学模型,故使用有限元分析软件ANSYS Workbench对磁路进行仿真,分析其特性并计算吸附力Fm。 选择NdFeB的牌号为42SH,参数如表1所示。 表1 NdFeB 42SH特性参数Tab.1 Characteristic parameters of NdFeB 42SH 导磁平面材料为普通碳钢,其饱和磁感应强度高于NdFeB 42SH的剩余磁感应强度,且面积和厚度均足够大,故导磁平面处于欠饱和状态,在计算中可以简化为线性材料,取其相对磁导率为2 000。取空气的相对磁导率为1。 3.2新型永磁吸附装置结构特性分析 假定永磁体的高度均为15 mm;宽度均相等,单个组成单元的宽度保持为30 mm;每个组成单元中Br首尾相连构成正多边形;气隙厚度Lg=6 mm。使用ANSYS Workbench计算得到单位质量吸附力fm分别与永磁体长度Lm、组成单元数量N以及组成单元中永磁体数量n的关系曲线如图4所示,由图4可见,当Lm、N、n逐渐增大时,fm逐渐增大,并趋于极限值,与2.2节中分析结果一致。 3.3组成单元结构参数优化 当理想模型采用表1中的参数,Lg=6 mm时,绘制式(11)所示fm(Rmax)的函数图像,如图5所示。从图中可以看出,当Rmax≈15.5 mm时,fm max≈2 245 N/kg。 图4 fm与Lm、N、n关系曲线Fig.4 Relation curves between fm and Lm,N,n 图5 fm(Rmax)函数图像Fig.5 Functional image of fm(Rmax) 根据新型永磁吸附装置和理想模型的相似性,当新型永磁吸附装置的材料以及气隙厚度Lg一定时,组成单元的结构参数同样存在最优值,使得单位质量吸附力最大。根据3.2节中的分析结果,选取Lm=200 mm、N=5、n=8、Lg=6 mm进行结构参数优化,此时fm已非常接近于极限值。组成单元结构参数如图6所示,按照2.1节中所述规则,有W1=W8,W2=W7,W3=W6,W4=W5,-θ1=θ8,-θ2=θ7,-θ3=θ6,-θ4=θ5,因此优化问题可表述为式(17)。 图6 组成单元结构参数Fig.6 Structural parameters of the component unit 本研究采用ANSYS Workbench 14.5提供的MOGA(multi-objective genetic algorithm)[17]算法进行结构参数优化。MOGA算法适用于本研究中这类多变量全局择优的优化问题。优化结果如表2所示。优化后的单位质量吸附力fm=1 787.7 N/kg,理想模型的fm max≈2 245 N/kg,fm/fm max≈80%,可见新型永磁吸附装置已经相当接近理想模型,其磁路具有较高的优化程度。 表2 结构参数优化结果Tab.2 Optimization results of the structural parameters 新型永磁吸附装置磁路仿真结果如图7所示。图7a为三维磁感应强度分布,图7b为横截面中磁感应强度分布,其中C区域表示一个组成单元及其对应的磁场。由图7b可见,永磁吸附装置上方绝大部分区域磁感应强度为0,绝大部分磁场聚集在永磁吸附装置和导磁平面之间,只有左右两侧(B区域)存在少量漏磁通。图7c是图7b中C区域附近的局部放大图,表示磁感应强度矢量的分布。从图7c可以看出新型永磁吸附装置的磁路确实相似于理想模型的,磁感线聚集在组成单元、导磁平面和两者之间的气隙中,相邻组成单元的磁感线互不相交。 图7 新型永磁吸附装置磁路仿真结果Fig.7 Magnetic circuits simulation result in the cross section of the novel permanent magnetic adhesion device 图8为文献[15]中所述Halbach型永磁吸附装置中Halbach阵列的结构及参数。采用NdFeB 42SH试制了该Halbach阵列和本文提出的新型永磁吸附装置中的永磁体阵列,其结构参数如表3所示。结构参数均参考优化后的值,同时考虑到永磁体的加工精度、实验的操作性以及控制变量等因素。 图8 Halbach阵列的结构和参数Fig.8 Structure and parameters of the Halbach array表3 两种永磁吸附装置的结构参数Tab.3 Structural parameters of the two permanent magnetic adhesion devices 变磁化方向单元组合式Halbach型n=8,N=4,Lm=20mmc=20mmH=14.8mmb=14.8mmW1=W8=4.9mm,W2=W7=4.5mma1=8.8mm,共8块W3=W6=4.7mm,W4=W5=4.5mma2=11.2mm,共7块-θ1=θ8=79°,-θ2=θ7=58°-θ3=θ6=35°,-θ4=θ5=12° 由表3可以得到,新型永磁吸附装置中永磁体阵列总宽度=8(W1+W2+W3+W4)=148.8 mm,Halbach阵列总宽度=8a1+ 7a2=148.8 mm,永磁体长度Lm=c,永磁体高度H=b。因此,两者体积相等,按密度ρ=7 450 kg/m3计算,两者质量均为0.328 kg。 图9 两种永磁吸附装置实物图Fig.9 Real objects of the two permanent magnetic adhesion devices 试制的两种永磁吸附装置实物如图9所示,使用少量辅件固定永磁体。轭铁同时具有增强磁场和固定永磁体的功能,而这两种永磁吸附装置均无需轭铁来增强磁场,辅件只起固定的作用,故采用密度较小的铝合金材料,且辅件经过强度设计使其体积尽量小,从而使辅件质量尽量小。辅件质量为0.09 kg,故两种永磁吸附装置的质量为0.418 kg。 将气隙厚度Lg从4 mm增加到10 mm,每1 mm测量吸附力Fm,计算后得到如图10所示的单位质量吸附力fm与气隙厚度Lg的关系曲线。 图10 单位质量吸附力fm与气隙厚度Lg关系曲线Fig.10 Relation curves between the unit mass adhesion force fm and the air gap thickness Lg 从图10中可以看出,新型永磁吸附装置的单位质量吸附力fm测量值较Halbach型永磁吸附装置平均增大115%。其中,当气隙厚度Lg=4 mm时,增幅为37%;当气隙厚度Lg逐渐增大至10 mm时,增幅逐渐提高至228%;不同气隙厚度下单位质量吸附力的计算值与测量值总是相当接近,相对误差在16%以内,误差来源于实际磁化方向偏差和永磁体特性参数偏差等。 仿真计算和实验测量结果表明,与Halbach型永磁吸附装置相比,新型永磁吸附装置的单位质量吸附力显著增加,而且随着气隙厚度增大衰减得更慢。 1)研究了永磁吸附装置的设计理论,并在设计理论的基础上,提出并实现了一种变磁化方向单元组合式永磁吸附装置,该装置由若干磁化方向不同的永磁体紧密排列而成,不同磁化方向首尾相连构成环形。与Halbach型永磁吸附装置相比,显著提高了单位质量吸附力。 2)采用有限元法对新型永磁吸附装置进行参数化建模、结构特性分析、磁路仿真、吸附力计算,验证了新型永磁吸附装置的工作原理并对其结构参数进行了优化设计。 3)试制了相同材料、体积的新型永磁吸附装置和Halbach型永磁吸附装置,实验测量了fm与Lg的关系曲线,结果与计算值基本吻合,新型永磁吸附装置的单位质量吸附力测量值平均增幅在1倍以上。 [1]管维亚,吴峰,鞠平.直驱永磁风力发电系统仿真与优化控制[J].电力系统保护与控制,2014,42(9):54-60. Guan Weiya,Wu Feng,Ju Ping.Simulation and optimized control of direct-drive permanent magnet wind power system[J].Power System Protection and Control,2014,42(9):54-60. [2]蒙晓航,叶林,赵永宁.永磁直驱同步风电场多机动态等值模型[J].电力系统保护与控制,2013,41(14):25-32. Meng Xiaohang,Ye Lin,Zhao Yongning.Dynamic multi-machine equivalent model of direct drive permanent magnet synchronous generators of wind farm[J].Power System Protection and Control,2013,41(14):25-32. [3]薛毓强,吴金龙.基于分布参数磁路模型的永磁接触器吸力特性[J].电工技术学报,2014,29(7):222-228. Xue Yuqiang,Wu Jinlong.Study of attractive force characteristics based on magnetic distributed parameter circuit model of permanent magnet contactors[J].Transactions of China Electrotechnical Society,2014,29(7):222-228. [4]张清枝,牛联波,艾永乐.永磁辅助磁阻同步电机性能分析[J].电力系统保护与控制,2011,39(22):129-132. Zhang Qingzhi,Niu Lianbo,Ai Yongle.Performance analysis of permanent magnet assisted reluctance synchronous machine[J].Power System Protection and Control,2011,39(22):129-132. [5]Coey J.Permanent magnet applications[J].Journal of Magnetism and Magnetic Materials,2002,248(3):441- 456. [6]钟文定.技术磁学[M].北京:科学出版社,2009. [7]Okamoto Y,Tominaga Y,Wakao S,et al.Improvements in material-density-based topology optimization for 3-D magnetic circuit design by FEM and sequential linear programming method[J].IEEE Transactions on Magnetics,2014,50(2):689-692. [8]李祥林,程明,邹国棠,等.聚磁式场调制永磁风力发电机工作原理与静态特性[J].电工技术学报,2014,29(11):1-9.Li Xianglin,Cheng Ming,Zou Guotang,et al.Principle and analysis of a new flux-concentrating field-modulated permanent-magnet wind power generator[J].Transactions of China Electrotechnical Society,2014,29(11):1-9. [9]桂仲成,陈强,孙振国,等.爬壁机器人永磁吸附装置的优化设计[J].电工技术学报,2006,21(11):40-46. Gui Zhongcheng,Chen Qiang,Sun Zhenguo,et al.Optimization of permanent-magnetic adsorption device for wall-climbing robot[J].Transactions of China Electrotechnical Society,2006,21(11):40-46. [10]Wu Minghui,Pan Gen,Zhang Tao,et al.Design and optimal research of a non-contact adjustable magnetic adsorption mechanism for a wall-climbing welding robot[J].International Journal of Advanced Robotic Systems,2013,10(1):257-271. [11]Zhu Z Q,Howe D.Halbach permanent magnet machines and applications:a review[J].IET Electric Power Applications,2001,148(4):299-308. [12]Bjørk R ,Bahl C R H,Smith A,et al.Comparison of adjustable permanent magnetic field sources[J].Journal of Magnetism and Magnetic Materials,2010,322(22):3664-3671. [13]宋玉晶,张鸣,朱煜.Halbach永磁阵列磁场解析求解及推力建模[J].电工技术学报,2014,29(11):61-67.Song Yujing,Zhang Ming,Zhu Yu.Modeling of Halbach array magnetic field and motor thrust[J].Transactions of China Electrotechnical Society,2014,29(11):61-67. [14]张一鸣,乔德治,高俊侠.Halbach阵列永磁体的研究现状与应用[J].分析仪器,2010(2):5-10. Zhang Yiming,Qiao Dezhi,Gao Junxia.Research status and applications of Halbach array permanent magnets[J].Analytical Instrumentation,2010(2):5-10. [15]陈勇,王昌明,包建东.新型爬壁机器人磁吸附单元优化设计[J].兵工学报,2012,33(12):1539-1544. Chen Yong,Wang Changming,Bao Jiandong.Optimization of a novel magnetic adsorption unit for wall-climbing robot[J].Acta Armamentarii,2012,33(12):1539-1544. [16]Liu Z W.New developments in NdFeB-based permanent magnets[J].Key Engineering Materials,2012,510-511:1-8. [17]Murata T,Ishibuchi H,Tanaka H.Multi-objective genetic algorithm and its applications to flowshop scheduling[J].Computers & Industrial Engineering,1996,30(4):957-968. Optimization Design of the Unit Combined Permanent Magnetic Adsorption Device with Variable Magnetization Directions Yan Chenfei1Sun Zhenguo1,2Zhang Wenzeng1Chen Qiang1,2 (1.Key Laboratory for Advanced Materials Processing Technology of Ministry of Education Tsinghua UniversityBeijing100084China 2.Yangtze Delta Region Institute of Tsinghua UniversityJiaxing314006China) Based on the design theory of the permanent magnetic adsorption devices,a variable magnetization direction and unit combined device is proposed.This device is composed of closely arranged permanent magnets,whose different magnetizing directions are connected into an annulus.The finite element method is used for parameterized modeling,structural characteristic analysis,magnetic circuit simulation,adsorption force calculation,and structural parameter optimization of the proposed device.The novel and the Halbach type permanent magnetic adsorption devices with the same material and volume are trial-produced.The relation curves between the unit mass adsorption force and the air gap thickness are measured.The experiment results prove that the unit mass adsorption force of the novel device doubles averagely compared with the Halbach device,and the highest amplification is 2.3 times. Permanent magnetic adsorption device,magnetic circuits-design,magnetic circuits-simulation,parameter optimization,Halbach array 2015-01-27改稿日期2015-03-23 TM144 闫晨飞男,1990年生,硕士研究生,研究方向为爬壁机器人技术。 E-mail:yancf12@mails.tsinghua.edu.cn 孙振国男,1971年生,副教授,博士生导师,研究方向为机器人技术。 E-mail:sunzhg@tsinghua.edu.cn(通信作者) 国家自然科学基金资助项目(51475259)。2 变磁化方向单元组合式永磁吸附装置


3 新型永磁吸附装置结构特性分析与参数优化






4 对比验证实验


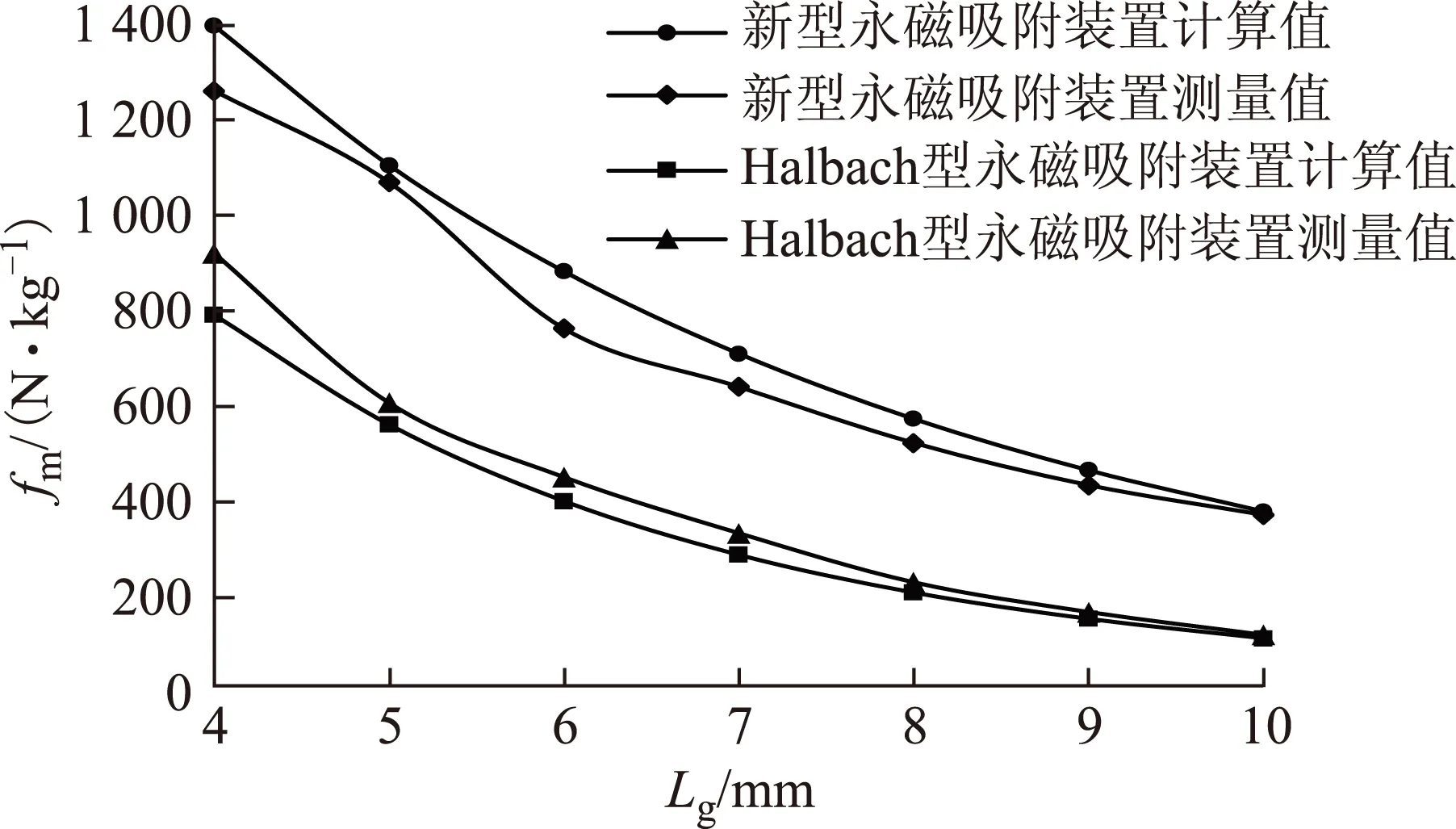
5 结论