光纤陀螺仪中尖峰脉冲引起漂移的误差分析及其抑制
2016-10-14靳晋军王学锋于海成郑晓娟王军龙
靳晋军,王学锋,于海成,郑晓娟,王军龙
(1.北京航天控制仪器研究所,北京100039;2.北京航天时代光电科技有限公司,北京100094)
光纤陀螺仪中尖峰脉冲引起漂移的误差分析及其抑制
靳晋军1,王学锋1,于海成2,郑晓娟2,王军龙1
(1.北京航天控制仪器研究所,北京100039;2.北京航天时代光电科技有限公司,北京100094)
首次分析了光纤陀螺仪探测器输出信号中频率固定的尖峰脉冲对光纤陀螺仪零偏漂移的影响机理,给出了尖峰脉冲影响光纤陀螺仪零偏漂移的误差模型;根据干涉式数字闭环光纤陀螺仪探测器输出信号的特点,提出了一种基于高速集成模拟开关的时域选通尖峰脉冲抑制具体实现方法,实验验证了尖峰脉冲引起的零偏漂移大小和理论分析接近,表明了误差模型的正确性,同时表明该方法能够有效降低尖峰脉冲引起的光纤陀螺仪零偏漂移。
光纤陀螺仪;尖峰脉冲;零偏漂移;误差模型
0 引言
光纤陀螺仪(FOG)是一种基于Sagnac效应的新型惯性仪表[1],具有可靠性高、寿命长、精度适应面宽等诸多优点,在导航制导与控制、精密测量等军事和民用领域都有广泛应用[2-3]。
干涉式光纤陀螺仪数字闭环电路的主要功能是对Sagnac效应信号进行调制,同时检测探测器的输出信号并进行解调输出及反馈。探测器的输出信号中包含有幅值较大的尖峰脉冲,这些尖峰脉冲会降低光纤陀螺仪的性能[4-6],因此必须采取有效措施抑制尖峰脉冲,提高光纤陀螺仪性能。郑晓娟等采用避开尖峰脉冲积分的方法,能够防止跨阻抗前置放大器中的高阻抗带来的热噪声等问题[7];陆家兵等采用梳状滤波方法抑制尖峰脉冲并降低了光纤陀螺仪噪声[8];但还没有文献开展尖峰脉冲对光纤陀螺仪零偏漂移影响的研究。
本文结合干涉式数字闭环光纤陀螺仪的调制解调方法,首先分析了尖峰脉冲谐波分量对零偏漂移的影响以及高低温下零偏漂移误差机理;提出了一种基于集成模拟开关的尖峰脉冲抑制方法——时域选通方法,该方法避免了繁杂的分离模拟器件静态工作点设置工作,具有较高的可移植性;最终进行了试验验证,试验结果证实该方法能够有效地抑制尖峰脉冲引起的光纤陀螺仪零偏漂移。
1 尖峰脉冲产生机理及其对光纤陀螺仪性能影响分析
光纤陀螺仪的Sagnac效应信号检测属于微弱信号检测,为获取系统响应的最大灵敏度以及较高的信噪比,干涉式数字闭环光纤陀螺仪通常采用调制与解调技术从强噪声背景中检测出有用信号[9-10],调制信号一般是由数字信号处理电路产生的方波信号,施加偏置调制信号后,光纤陀螺仪的干涉响应必然会产生调制相位的突变(即从一个阶梯高度变化到另一个阶梯高度),而被调制的干涉光功率信号是偏置的连续的正弦信号,如图1所示,当调制信号相位突变时,调制相位从φb变化到-φb时,响应输出是连续变化的模拟信号,必然会沿着正弦响应曲线,从I(φb)变化到I(0),再从I(0)变化到I(-φb),而I(0)对应于响应的最大电流,经过方波调制后,探测器输出信号中含有最大幅值为I(0)的尖峰脉冲。
实际干涉式数字闭环光纤陀螺仪工作原理如图2所示,由于尖峰脉冲幅值较大一般会导致前置放大器的迅速饱和,导致前置放大器不能工作在线性放大区;同时前置放大电路中使用的运算放大器不是理想的器件,从饱和工作状态过渡到线性放大工作状态需要一定的时间,在这段时间内会导致探测器输出信号的丢失,进而影响光纤陀螺仪的精度性能[11]。

图1 相位偏置调制产生尖峰脉冲原理图Fig.1The schematic diagram of spike pluses digital closed-loop fiber

图2 数字闭环光纤陀螺仪工作原理框图Fig.2The schematic diagram of interferometric optic gyro
A/D转换器采样的时间点在光纤陀螺仪状态固定后已经固定,当温度变化时,光纤的折射率会发生相应的变化,等效为光纤环长度变化,导致光纤环本征频率变化,进而使光纤陀螺仪探测器的输出信号相应的在时间轴上有偏移,导致A/D转换器采集的探测器输出信号的位置出现偏移,最终影响光纤陀螺仪的性能随温度变化而变化;而且光纤陀螺仪反馈回路中的非理想器件会使频率固定的尖峰脉冲脉宽被展宽,如果A/D转换器采集到这些尖峰脉冲,光纤陀螺仪的性能会随温度变化进一步降低。
2 尖峰脉冲对光纤陀螺仪零偏漂移的影响
理想的方波调制信号是占空比为1:1,正负幅值相等的方波信号,以幅值为E的一个周期的调制信号为例进行分析,其表达式为:

式中,τ为光纤环渡越时间,ε(t)是单位阶跃函数。
将式(1)做傅里叶级数展开得到:

理想的方波调制信号中只含有奇次的余弦谐波分量,这说明调制信号中的奇次谐波分量不会造成光纤陀螺仪输出的零偏漂移,因此造成光纤陀螺仪输出零偏漂移的可能是调制信号中的偶次谐波分量。
干涉仪的特性像一个时延线滤波器,调制信号φm(t)的任何偶次谐波将通过相位差Δφm(t)而等于零。因此标准的正弦和余弦调制都不会对光纤陀螺仪的零偏漂移产生影响;如果调制波形对称就不会产生零偏漂移误差[12]。
但是由于反馈回路中的非理想器件,实际的调制信号并不能保证占空比为50:50,而且调制相位变化时产生的上升沿和下降沿时间也不会严格相等,这些都会导致调制波形的不对称(反映在输出信号中就是尖峰脉冲不对称),进而影响光纤陀螺仪的零偏漂移。
2.1光纤陀螺仪采用积分输出情况下的影响
以图3中所示的一个周期的非理想调制信号为例进行分析,其数学表达式为:

式中,r是方波上升沿斜率,f是下降沿斜率,tm=(1+α)τ,α≠0表示占空比不为严格的50:50。
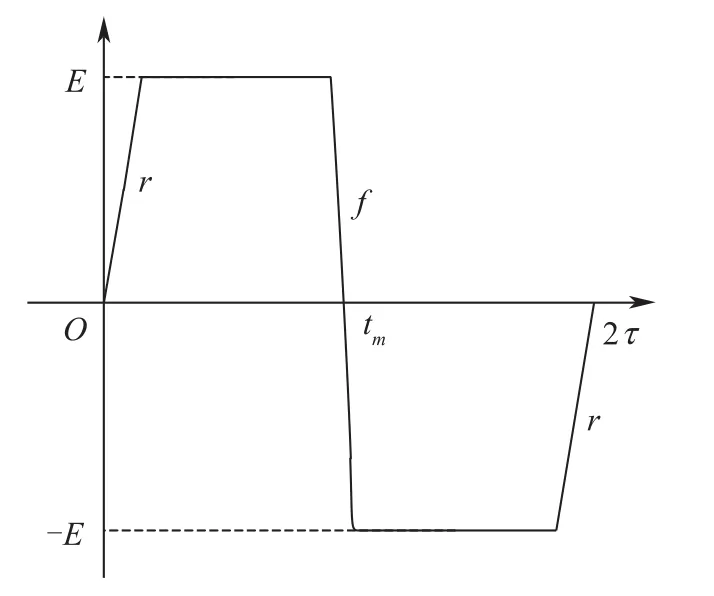
图3 非理想调制波形示意图Fig.3The reality modulate curve
对上述非理想调制波形(式(3))进行傅里叶级数变换得到:

经上述分析可知,调制信号中标准的正弦和余弦谐波分量都不会影响光纤陀螺仪的零偏漂移,只需要求出式(4)中的a0即可;将式(3)带入式(4)中,计算整理得到:

从式(5)得知由于调制方波波形的特性非理想,会产生大小为αE的直流偏置项,这一直流偏置项是尖峰脉冲引起光纤陀螺仪零偏漂移的主要原因。
光纤环的本征频率由式(6)计算:

式中,fe是本征频率,c是光速,n是折射率,L是光纤环长度。光纤折射率与温度的相关系数为由式(6)可知,本征频率与温度的相关系数也是。将其带入式(5)并整理得到由于这一项的存在造成的调制相位偏差为:

由于纯正弦(余弦)谐波不会造成光纤陀螺仪零偏漂移;因此总的调制相位误差就等于直流偏置造成的调制相位误差:

相应的调制相位误差乘以标度因数即可得到对应的角速度误差,即零偏漂移:

式中,λ是光源波长,D是光纤环直径,从式(9)可以得出结论,影响光纤陀螺仪零偏漂移大小的主要原因是方波的调制深度和调制方波占空比误差。同时说明在光纤陀螺仪探测器输出信号中,尖峰脉冲对光纤陀螺仪性能的影响是尖峰脉冲不对称性引起的零偏漂移而不是光纤陀螺仪噪声。
假定占空比误差α=1×10-3,工作温度范围100∘C,取某型光纤陀螺仪典型参数(L=900m,D=95cm)带入式(9),计算得到零偏漂移Ωdrift=0.28(°)/h;零偏漂移与调制深度成正比,在调制深度选择上,应综合考虑光纤陀螺仪的灵敏度和零偏漂移。
2.2光纤陀螺仪输出采用多点采样情况下的影响
如果避开探测器输出信号中固有的尖峰脉冲,而采取在输出信号平坦的区域内进行多点采样的方式输出,则上述分析就不准确。但是尖峰脉冲中的高次谐波会对平坦区域产生耦合影响,输出的平坦区域只是相对平坦,其中包含了大量的谐波成分,仍然会影响光纤陀螺仪的零偏漂移性能。
尖峰脉冲对输出信号的耦合作用主要是由电路中的非理想运算放大器造成的,集成运算放大器的非理想特性主要是指:运算放大器建立时间不为零,输入阻抗和开环增益并是无穷大,而且放大器内部存在分布电容和寄生电容。
为了消除其他因素对光纤陀螺仪零偏漂移的影响,下面通过仿真来分析多点采样输出方式下,尖峰脉冲对光纤陀螺仪零偏漂移的影响,仿真得到光纤陀螺仪探测器输出信号波形如图4所示。
图4(b)是尖峰脉冲局部放大图,可以看出随着尖峰脉冲能量的释放,输出信号中存在着超调和振荡,这些超调和振荡经过前置放大电路放大后会进一步加深尖峰脉冲对光纤陀螺仪零偏漂移的影响。

图4 仿真得到的探测器输出波形Fig.4The simulation curve of PIN-FET output signal
前置放大电路使用Multisim中的集成运算放大器模型,分布电容2pF,寄生电容4.5pF;将仿真得到的探测器输出波形经过前置放大电路,被反相放大后的波形如图5(a)所示。
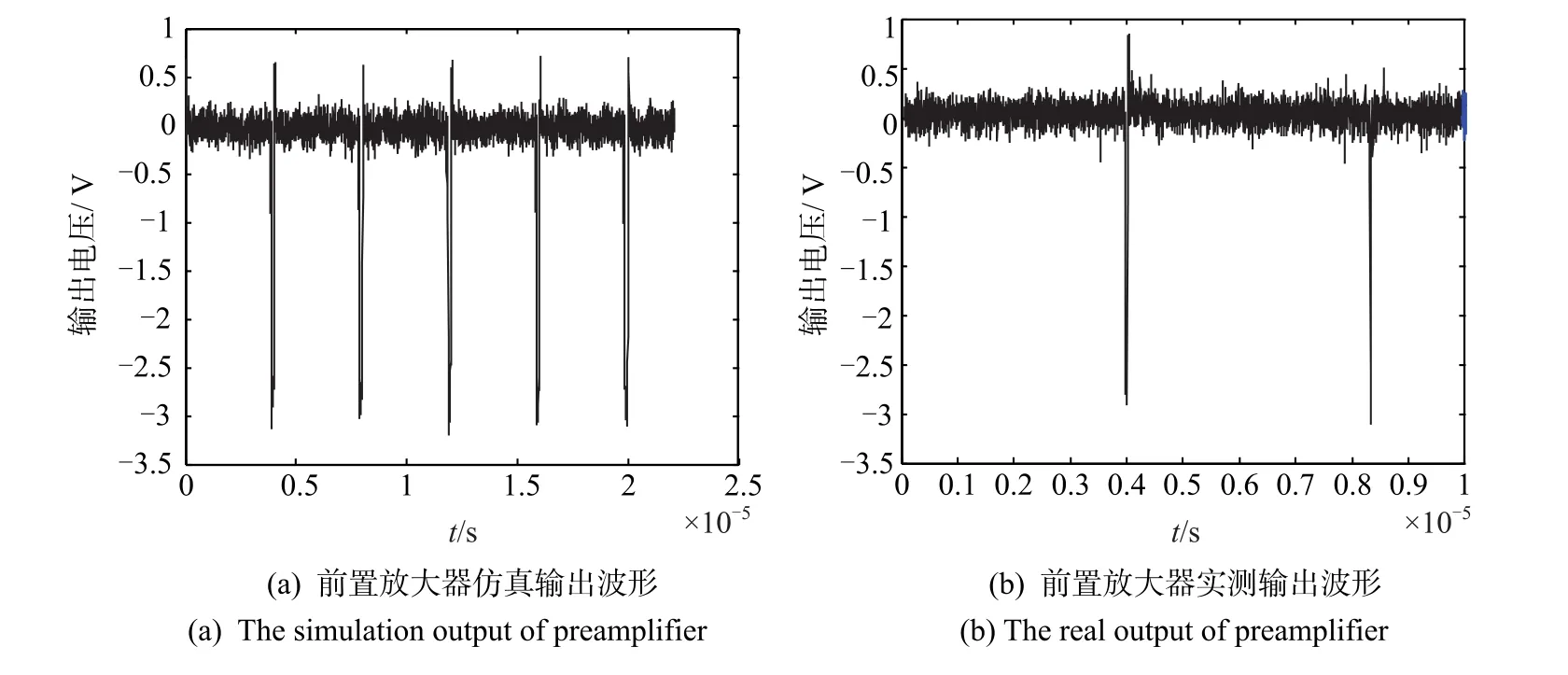
图5 经前置放大器放大后的波形Fig.5The preamplifier output curve
对比图5(a)和图5(b)可知,仿真得到的波形与实测波形基本一致,仿真结果真实有效,每个渡越时间τ内,在相对平坦的区域采样多个点得到光纤陀螺仪输出。温度变化时,尖峰脉冲脉宽变化,图4(b)中振荡周期随之变化,所以不同温度下解调得到的光纤陀螺仪零偏不同。同样取2.1节中的典型光纤陀螺仪,常温25∘C下测得其尖峰脉冲脉宽为100ns,60∘C时,由于折射率发生变化,等效的光纤环长度变化,从而尖峰脉冲脉宽也变化。相对于25∘C,60∘C时L变化量为:

式中,n为折射率,10-5为折射率随温度的变化系数,ΔT为温度变化量。因此,60∘C时尖峰脉冲脉宽变为250ns;导致A/D转换器采集的探测器输出信号的位置出现偏移。分别在常温和60∘C时对前置放大器仿真输出波形进行解调,得到光纤陀螺仪的零偏漂移(峰峰值)为0.13(°)/h。
3 尖峰脉冲抑制方法
如果在探测器输出后级直接采取频域滤波措施,则尖峰脉冲脉宽会被展宽,对后续数字处理电路产生更加不利的影响,因此不能采用传统的频域滤波器对探测器输出信号做直接处理。本文采用模拟开关选通方法在时域中抑制尖峰脉冲,以便于后续电路做频域滤波处理。
如图6(a)所示,该方法的基本思想是直接切断探测器与前置放大器之间的电气连接。即在正常的信号通路中加入一个模拟开关,控制时序如图6(b)所示,控制电平为高对应开关断开,控制电平为低对应开关闭合;反映在信号通路上:尖峰脉冲到来时刻控制开关断开探测器和前置放大器之间的电路,尖峰脉冲不能进入前置放大器;尖峰脉冲结束后再闭合开关,恢复通路,使得探测器输出信号可以顺利经过前置放大器放大后进入A/D转换器,光纤陀螺仪的正常工作不会受到影响。
4 试验结果
基于2.1节中所述的光纤陀螺仪,对时域选通方法进行了试验验证,首先比较了模拟开关前后的信号,如图7所示。
由图7可看出,本文提出的时域选通方法能够实现尖峰脉冲抑制功能,并且由开关引入的开关频率噪声影响很小,原状态的噪声(±3σ)为0.0281(°)/h,加入尖峰抑制方案后的陀螺噪声(±3σ)变为0.0279(°)/h。

图6 时域选通方法Fig.6The time-domain input signal strobe method
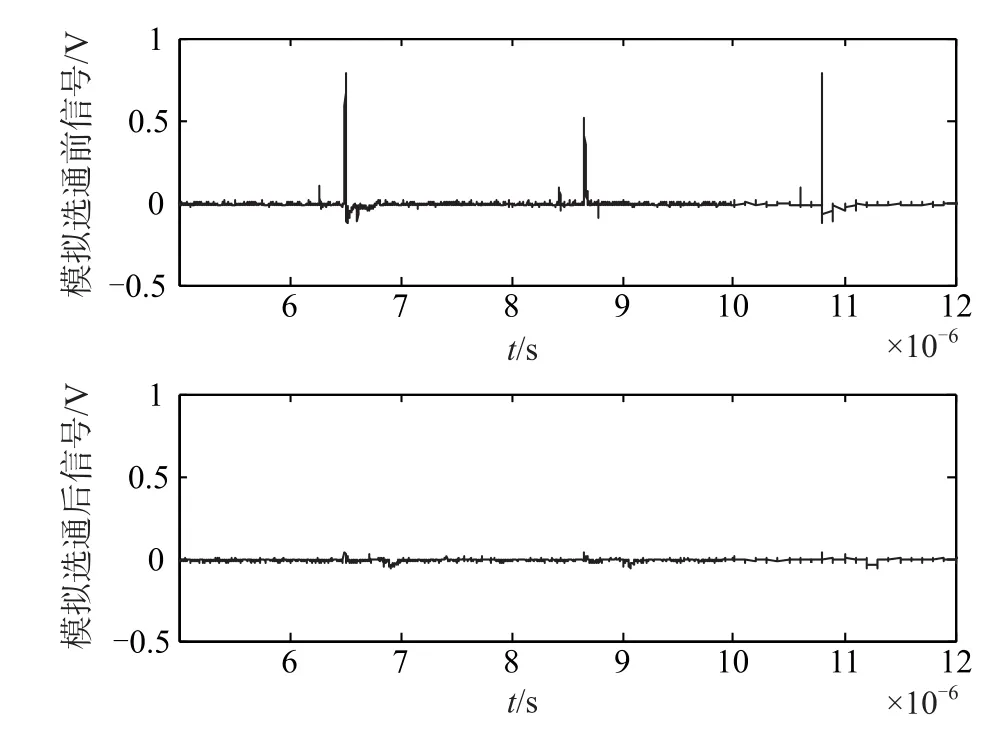
图7 模拟选通前后探测器输出波形对比Fig.7The PIN-FET output signal curve before and after analog switch

图8 光纤陀螺仪高低温输出对比Fig.8The comparison testing curves of FOG at different temperatures
进行光纤陀螺仪零偏漂移随温度变化的试验,测试温度点依次是25∘C、30∘C、40∘C、 50∘C、55∘C、60∘C,在大理石平台上采用小型加热装置测试(这样能够避免温箱振动的影响),未进行更低温度点的测试,每个测试温度点,光纤陀螺仪连续测试60min,前10min为光纤陀螺仪的升温过程,为了消除温度梯度的影响,只取后50min数据做分析,经100s平滑后如图8所示,原状态光纤陀螺仪的高低温下零偏漂移(峰峰值)为0.2(°)/h,在光纤陀螺仪电路中加入尖峰抑制方案后高低温零偏漂移(峰峰值)优于0.1(°)/h。
该试验证实了文中提出的误差模型的正确性,同时证明文中提出的尖峰抑制方法能够有效地抑制尖峰脉冲并降低光纤陀螺仪零偏漂移,尖峰脉冲抑制后光纤陀螺仪仍然存在零偏漂移,说明除尖峰脉冲以外,还有其他的因素也会造成光纤陀螺仪的零偏漂移,有待进一步研究。
改进后,光纤陀螺仪输出随温度增大而单调减小(30℃~60℃),并且可用直线做近似拟合,可以相应地进行温度补偿,减小温度环境下光纤陀螺仪零偏漂移,如图9所示。
对于本征频率比较高的小型光纤陀螺仪,其渡越时间短,尖峰脉冲在时域上所占的比重更大,输出信号中相对平坦的区域更小,抑制尖峰脉冲后能更加显著地减小光纤陀螺仪的零偏漂移误差。

图9 光纤陀螺仪输出与温度关系Fig.9The relation between FOG output and temperature
5 结论
本文分析了干涉式数字闭环光纤陀螺仪探测器输出信号中尖峰脉冲对光纤陀螺仪性能影响的机理,理论推导了温度变化条件下,尖峰脉冲对光纤陀螺仪零偏漂移的影响,基于尖峰脉冲的特点提出了一种尖峰脉冲抑制的方法——时域选通方法,并应用于光纤陀螺仪电路中,通过对比试验验证了方法的可行性,该方法能够有效地抑制尖峰脉冲,并且对光纤陀螺仪的零偏漂移有显著的改善效果。此外,只要尖峰脉冲的产生是规律性的,其他传感器的信号检测电路中也可以应用该方法对尖峰脉冲进行抑制,改善传感器性能。
[1]谭健荣,刘永智,黄琳.光纤陀螺的发展现状[J].激光技术,2006,30(5):544-547. TAN Jian-rong,LIU Yong-zhi,HUANG Lin.Development of fiber optic gyroscope[J].Laser Technology,2006,30(5):544-547.
[2]Sanders G A,Szafraniec B,Liu Renyong,et al.Fiber optic gyros for space,marine,and aviation applications[C]. SPIE,1996:61-67.
[3]Kajioka H,Humagai T,Nakai H,et al.Commercial applications of mass-produced fiber optic gyros[C].SPIE,1996:18-37.
[4]Bruns W K.Optical fiber rotation sensing[M].San Diego:Academic Press,1993.
[5]ZHANG Yan-shen.Precision navigation systems[M]. Beijing:ChinaAerospace Press,2005.
[6]宋凝芳,李立京,金靖,等.光纤陀螺的死区研究[J].弹箭与制导学报,2005,25(1):22-26. SONG Ning-fang,LI Li-jing,JIN Jing,et al.The study on deadband of fiber optic gyros[J].Journal of Projectiles,Rockets,Missiles and Guidance,2005,25(1):22-26.
[7]郑晓娟,王学锋,于海成,等.模拟选通积分电路的温度特性对陀螺性能影响的实验研究[J].宇航学报,2012,33(7):991-995. ZHENG Xiao-juan,WANG Xue-feng,YU Hai-cheng,et al.Experimental research on the influence of temperature characteristics of analog selection integral circuit on FOG performance[J].Journal of Astronautics,2012,33 (7):991-995.
[8]陆家兵,张琛.光纤陀螺仪同步相关检测技术的设计与实现[J].舰船科学技术,2013,35(8):111-114. LU Jia-bing,ZHANG Chen.Synchronous correlation detection technique for fiber optic gyroscope[J].Ship Science and Technology,2013,35(8):111-114.
[9]王巍.干涉型光纤陀螺仪技术[M].北京:中国宇航出版社,2010. WANG Wei.Interferometric fiber optic gyroscope[M]. Beijing:ChinaAerospace Press,2010.
[10]刘凯,张晓峰,周昌学,等.光纤陀螺仪双阶梯波数字相位调制的实验[J].压电与声光,2010,32(4):561-564. LIU Kai,ZHANG Xiao-feng,ZHOU Chang-xue,et al. Experiment of dual ladder wave phase modulation in FOG[J].Piezoelectrics&Acoustooptics,2010,32(4):561-564.
[11]鲁军,殷建玲,刘军,等.高精度干涉式光纤陀螺前置放大器的设计与实现[J].中国惯性技术学报,2013,21 (5):668-671. LU Jun,YIN Jian-lin,LIU Jun,et al.Design and realization for pre-amplifier of high precision IFOG[J].Journal of Chinese Inertial Technology,2013,21(5):668-671.
[12]张桂才,王巍.光纤陀螺仪[M].北京:国防工业出版社,2002. ZHANG Gui-cai,WANG Wei.The fiber optic gyroscope[M].Beijng:National Defense Industry Press,2002.
ErrorAnalysis and Reduction of Bias Drift of Digital Closed-loop Fiber Optic Gyro Resulted from Spike Pluses
JIN Jin-jun1,WANG Xue-feng1,YU Hai-cheng2,ZHENG Xiao-juan2,WANG Jun-long1
(1.Beijing Institute ofAerospace Control Devices,Beijing 100039;2.BeijingAerospace Times Optical-electronic Technology Company,Beijing 100094)
Effect of spike pluses in PIN-FET output signal on bias drift of fiber optic gyro is analyzed for the first time in this paper.The error model of bias drift resulted from spike pluses is given.After the character of PIN-FET output signal of fiber optic gyro is analyzed,a time-domain input signal strobe method based on high-speed analog switch is designed for elimination of spike pluses in PIN-FET output signal.Finally,an experiment is made to verify the error model,the experimental results show that the theoretic analysis and the designed spike pluses suppress method is practicable and the bias drift resulted from spike pluses can be decreased effectively.
fiber optic gyroscope;spike pluses;bias drift;error model
U666.1
A
1674-5558(2016)02-01062
10.3969/j.issn.1674-5558.2016.01.009
靳晋军,男,硕士,研究方向为导航、制导与控制。
2015-01-12
