相机稳定平台的RBF神经网络PID控制方法
2016-10-14汤世松程向红塔高明弓静
汤世松,程向红,塔高明,弓静
(东南大学仪器科学与工程学院,南京210096)
相机稳定平台的RBF神经网络PID控制方法
汤世松,程向红,塔高明,弓静
(东南大学仪器科学与工程学院,南京210096)
相机稳定平台是作为飞行器航拍的一种外挂式设备,可以采用先进的控制策略避免飞机姿态变化和机身抖动对航拍质量造成的影响。常规的PID控制需要人为手动调节参数,提出一种基于RBF神经网络PID参数自整定的控制方法。通过设定初始PID参数,利用RBF神经网络自学习能力进行在线参数整定。仿真结果表明,与传统PID相比,RBF神经网络PID具有较高的精度和较强的适应性,平台跟踪精度可以达到3′以内。
稳定平台;PID;RBF神经网络
0 引言
航空拍摄技术对于航测、侦察等军事领域技术的应用有着特殊的意义。航空相机因机动性好、时效性高、目的性强、携带仪器多、相对投入较低等优点,成为获取图像信息的主要途径[1]。相机稳定平台在飞行器航拍中应用十分普遍。相机/摄像头通过支架安装在相机稳定平台的台体上,当台体由于飞行器姿态变化、机身抖动和气流等因素影响偏离水平位置时,MEMS陀螺和光栅编码器敏感到角速度和姿态角的变化,误差量被输入控制器,控制器输出控制电压驱动电机工作,继而带动台体转动,使其保持水平,为相机/摄像头提供稳定的水平基准面,最终获得高质量图像。因此,提高稳定平台的水平跟踪精度是提高摄像精度的关键之一。
在工业控制中,PID控制是工业控制中最常用的方法。PID控制系统结构简单、控制效果良好,在目前的控制系统中占绝大多数[2]。但是,传统的控制方法具有一定的局限性:要人为地手动调节PID参数以达到良好的控制效果。同时,当面对不同的控制对象或控制对象的数学模型不精确时,控制器的参数难以自动调整以适应外界环境的变化,需要再次重新整定。为了使控制器具有良好的自适应性,实现控制器参数的自动调整,本文采用RBF(Radial Basis Function)神经网络控制的方法[3-5]。利用人工神经网络的自学习这一特性,并结合传统的PID控制理论,构造RBF神经网络PID控制器,实现控制器参数的自动调整。通过相机稳定平台控制仿真表明RBF神经网络PID具有较高的精度和较强的适应性,验证了本文所提控制策略的有效性。
1 相机稳定平台结构及工作原理
1.1相机稳定平台总体结构设计
图1所示为所加工的相机稳定平台框架结构,主要由铝制材料加工而成。所设计稳定平台框架结构主要由俯仰框架、横滚框架和基座框架构成。依次对应图1的内框、中框和外框。基座框架和横滚框架分别连有直流力矩电机和光栅编码器。IMU模块、控制电路模块和电子水平仪安装在俯仰框架底部。相机/摄像头通过支架与内框相连,从底部伸出。
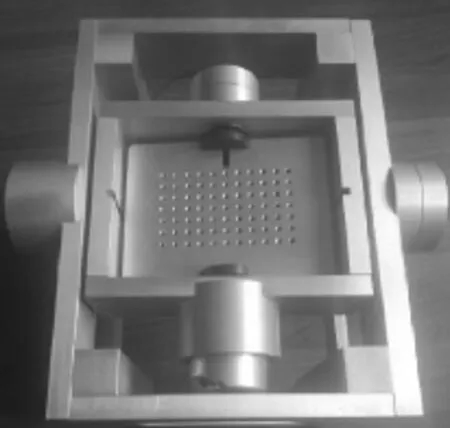
图1 相机稳定平台Fig.1Camera stable platform
1.2相机稳定平台工作原理
系统开机启动时,首先由电子水平仪水平调平;其次由IMU和光栅编码器分别敏感出相机稳定平台旋转的角速率以及旋转的角度,将角速率信息和角度信息分别输入到控制电路模块,控制电路模块根据输入的的角速率和角度,采用所设计的控制策略,控制电机转动;最终控制相机稳定平台内框的水平稳定。
1.3系统原理描述
图2所示为相机稳定平台的坐标系图,坐标系定义如下:
1)地理坐标系n:xn、yn、zn分别指向载体所在地的东、北、天方向。
2)载体坐标系b:与载体固连,xb、yb、zb分别指向载体的右、前、上方向。
3)中框(横滚框)坐标系r:与横滚环固连,yr轴沿横滚环轴,与yb轴指向相同,r系相对b系只能绕yb轴旋转,产生横滚环角θr。
4)内框(俯仰框)坐标系f:与俯仰环固连,xf轴沿俯仰环轴,与xr轴指向相同,f系相对r系只能绕xr轴旋转,产生俯仰环角θf。

图2 相机稳定平台坐标系图Fig.2Coordinates of camera stable platform


同时,俯仰环相对地理坐标系的角速度如下:
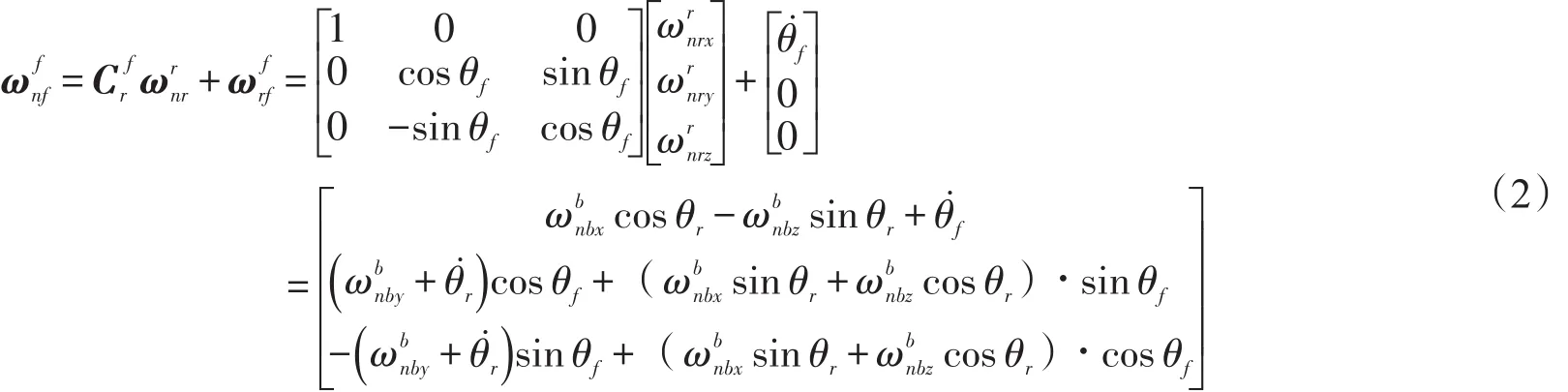
为使连接相机/摄像头的内框始终保持在水平位置,则要求相机稳定平台在初始水平校准后,内框相对地理坐标系的角速度为0,即满足:

联立式(2)和式(3)可得两电机驱动各自负载产生的角速度需满足:

当控制结果满足式(4)时,内框将保持水平。
1.4相机稳定平台控制框图
由于内外框架采用相同的控制回路结构,本文以俯仰框为例,介绍图3所示俯仰轴控制结构。俯仰轴控制结构采用双环路控制,外环为位置环,内环为速度环。速度环由IMU测得的角速率反馈,从而加快系统响应速度,及时克服外在干扰;位置环在实际系统中采用光栅编码器测得的角度进行反馈,本文仿真中采用陀螺数据解算的方式求得,进而实现相机稳定平台与当地水平面保持水平。

图3 俯仰轴伺服回路控制框图Fig.3The control block diagram of pitch axis
2 RBF神经网络PID控制
相机稳定平台是一个具有强非线性的机电控制系统[9]。机械谐振、摩擦、随机干扰、轴间力矩耦合、陀螺漂移等不确定干扰因素使得平台系统的准确数学模型无法确定。RBF神经网络PID控制是一种具有自学习能力的在线参数整定的控制,在设计过程中不需要建立被控对象的准确数学模型,因此适用于非线性稳定平台的控制。
2.1RBF神经网络结构
RBF神经网络是一种具有单隐层的三层前馈网络。它模拟人脑局部调整、相互覆盖接收域,因此,是一种局部逼近网,已证明它能以任意精度逼近任意连续函数。RBF网络是一种三层前向网络,由输入到输出是非线性的,而隐含层到输出层是线性的[8]。图4所示RBF网络结构中,x= [x1,x2,…,xn]T为网络的输入向量,h=[h1,h2,…,hm]T为径向基向量,wj为网络的输出权系数。ym为辨识网络的输出。辨识器的输出ym=w1h1+w2h2+…+ wmhm。本文在速度环采用RBF神经网络PID控制,网络为3-6-1结构,即输入层3个节点,隐含层6个节点,输出层1个节点。输入量为:系统实际值输出y,系统上一次实际值输出y_1,PID输出量的增量Δu。hj为高斯基函数,其中:

式中,Cj为网络的第j个节点的中心矢量:Cj=[cj1,cj2,…,cjn],i=1,2,…,n。bj为节点j的基宽度参数。
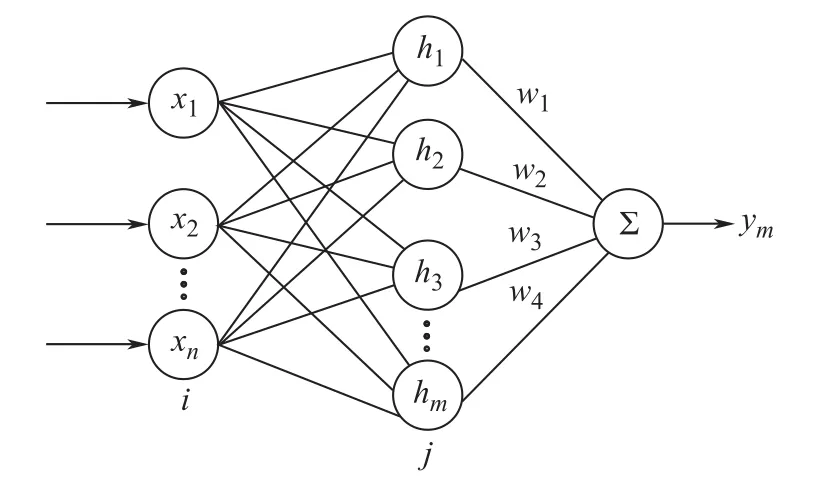
图4 RBF神经网络结构图Fig.4The block diagram of RBF neural network
2.2RBF神经网络学习机理
RBF神经网络辨识器的性能J=1/2(y-ym)2,根据梯度下降法,进行输出权、节点中心及节点基宽参数的迭代。迭代过程中,引入α、η分别作为学习速率和动量因子。
输出权的迭代算法如下:
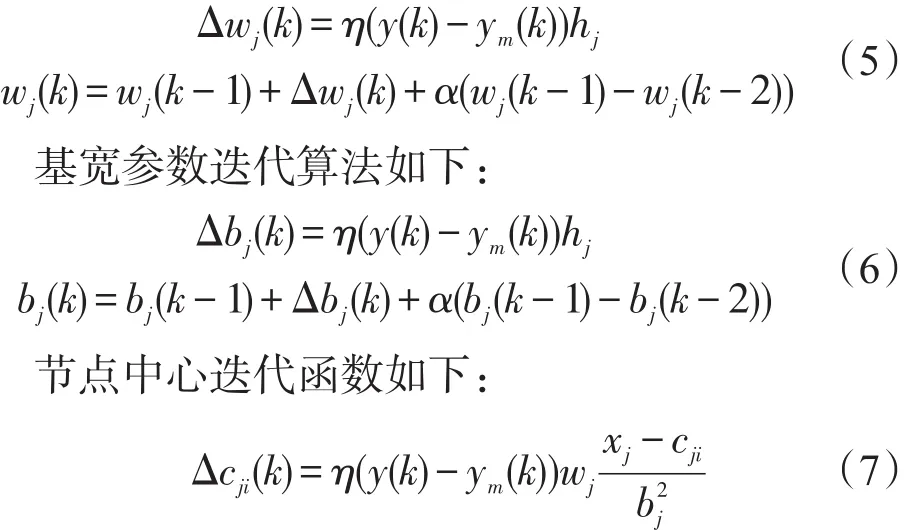
Jacobian阵(对象的输出对控制输入变化的灵敏度信息)算法为:

网络通过输入端x1,x2,…,xn,正向计算求解ym,继而根据y与ym的差值,逆向更新网络的输出权、基宽参数和节点中心。
2.3RBF神经网络PID整定原理
采用增量式PID控制器,控制误差为:

yd(k)为理论值,y(k)为实际值。此时,PID的三项输入为:
控制算法为:

3 仿真及分析
仿真条件设置为MEMS陀螺常值漂移为0.007(°)/s,电机峰值扭矩为40N·m,伺服采样频率为1000Hz。载体运动采用双正弦波叠加晃动,幅值分别为25°和20°,频率分别为0.125Hz和0.1Hz,相位差为60°。神经网络动量因子α=0.05,学习速率h=0.5,PID参数初始值分别为:kp0= 10,ki0=5,kd0=1,仿真时间设为60s。图5所示为不同控制策略下的俯仰方向平台跟踪精度。表1列出了两种控制结果的参数对比:常规PID控制的跟踪精度在5'左右;RBF神经网络PID控制的跟踪精度在3'左右。可见,RBF神经网络PID控制较常规PID控制下平台的跟踪精度提高约2'。同时,在人为将kd设置较大时,传统PID由于不具有参数自调节功能,仿真所得结果超调较大,而RBF神经网络PID很好地控制了系统的超调。如图6所示,在20s的时刻加上一个8N·m的阶跃干扰力矩,对比传统PID控制和RBF神经网络PID控制,传统PID有一个接近10s的调整过程,而采用RBF神经网络PID几乎不受影响,一直稳定在精度范围内。综上,RBF神经网络PID控制较传统PID控制下的平台的抗干扰能力显著增强。

表1 仿真数据Table 1The data of simulation
4 结论
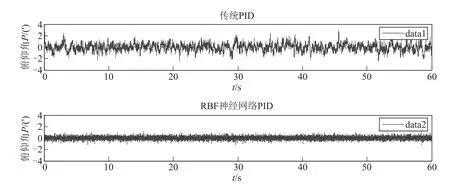
图5 不同控制策略下俯仰方向平台跟踪精度Fig.5The platform's tracking accuracy in pitch axis under different control methods

图620 s加阶跃力矩扰动俯仰方向平台跟踪精度Fig.6The platform's tracking accuracy in pitch axis during the step disturb
本文提出了一种用于相机稳定平台的RBF神经网络PID控制策略。运用神经网络自学习能力实现PID参数的在线调整,从而改善相机稳定平台控制系统的精度和适应能力。通过以上两种仿真结果表明:与传统PID控制相比,采用RBF神经网络PID控制能使相机稳定平台抗干扰能力显著增强,同时能将跟踪精度由5′提高到3′,为实现高精度飞行器航拍系统提供了一种新的途径。尽管本文提供了一种用于相机稳定平台的RBF神经网络PID控制方法,但所做工作仍然有限,将RBF神经网络与模糊控制相结合,以及RBF神经网络自适应控制,将在未来工作中继续研究。
[1]毛武军,王乐勇,赵文普,等.航空相机稳定平台设计与仿真[J].航空兵器,2009(4):48-52. MAO Wu-jun,WANG Le-yong,ZHAO Wen-pu,et al.Design and simulation of aerial camera stabilized platform [J].Aero Weaponry,2009(4):48-52.
[2]曾军,方厚辉.神经网络PID控制及其Matlab仿真[J].现代电子技术,2004,27(2):51-52. ZENG Jun,FANG Hou-hui.Neural network PID controller and its Matlab simulation[J].Modern Electronic Technology,2004,27(2):51-52.
[3]王旭东,邵惠鹤.RBF神经网络理论及其在控制中的应用[J].信息与控制,1997,26(4):272-284. WANG Xu-dong,SHAO Hui-he.RBF neural network theory and its application in control field[J].Information and Control,1997,26(4):272-284.
[4]Musavi M T,Ahmed W,Chan K H,et al.On the training of radial basis function classifiers[J].Neural Networks,1992,5(4):595-603.
[5]Park J,Sandberg I W.Approximation and radial-basisfunction networks[J].Neural Computation,1993,5(2):305-316.
[6]Park J,Sandberg I W.Universal approximation using radial-basis-function networks[J].Neural Computation,1991,3(2):246-257.
[7]秦永元.惯性导航[M].北京:科学出版社,2006. QIN Yong-yuan.Inertial navigation[M].Beijing:Science Press,2006.
[8]Wei Ji,Qi Li,Bo Xu.Adaptive fuzzy PID composite control with hysteresis-band switching for line of sight stabilization servo system[J].Aerospace Science and Technology,2011,15(1):25-32.
[9]刘金琨.先进PID控制MATLAB仿真[M].北京:电子工业出版社,2014. LIU Jin-kun.Matlab simulation of advanced PID control [M].Beijing:Electronics Industry Press,2014.
RBF Neural Network PID Control Method Used in Camera Stable Platform
TANG Shi-song,CHENG Xiang-hong,TAGao-ming,GONG Jing
(School of Instrument Science&Engineering,Southeast University,Nanjing 210096)
The camera stable platform is used for the aerial to shooting the pictures by hanging outside which can avoid influence of changes in aircraft attitude and body mass caused by jitter on aerial.Conventional PID control parameters need to be adjusted manually,so we propose a parameter self-tuning PID control method based on RBF neural network.By setting the initial PID parameters and using self-learning ability of RBF neural network,we tune the PID parameters online.The simulation results show that,the PID control based on RBF neural network can improve the accuracy and adaptability for the camera stable platform.The accuracy of the camera stable platform attitude can be controlled within 3′.
stable platform;PID;RBF neural network
U666.1
A
1674-5558(2016)01-01046
10.3969/j.issn.1674-5558.2016.01.001
汤世松,男,硕士,研究方向为导航制导与控制。
2014-12-10
