一种基于激光捷联惯组的定瞄一体化系统设计
2016-10-14赵琳康冰万琦卫瑞董彦维
赵琳,康冰,万琦,卫瑞,董彦维
(北京航天发射技术研究所,北京100076)
一种基于激光捷联惯组的定瞄一体化系统设计
赵琳,康冰,万琦,卫瑞,董彦维
(北京航天发射技术研究所,北京100076)
针对武器系统任意点随机发射和“停下即打”目标的需求,提出了一种基于激光捷联惯组的定瞄一体化系统设计方案。系统由以激光捷联惯组为核心的车载定位导航单元和以光管为核心的光学传递单元组成。由里程计、高程计、电子地图及卫星系统辅助激光捷联惯组实现较高精度的定位导航功能。通过与车载定位导航单元刚性固联的光学传递单元,采用光学传递方式实现与外部设备的瞄准,瞄准结果通过车载定位导航单元完成。系统首次将定位瞄准实现一体化集成,在不损失水平瞄准精度的情况下,降低了对瞄准环境的要求,达到预期效果。
激光捷联惯组;定位;瞄准;一体化
0 前言
国内在目前已装备的现役武器系统中绝大多数还是采用有依托光电斜瞄方式。随着新一代武器系统对射前生存能力提高的迫切需求,减少武器系统起竖后垂直暴露时间,缩短发射准备时间,使得采用中远距离的光电斜瞄系统逐渐被与发射平台集成的近距离水平瞄准系统所替代。水平瞄准系统配套的自主定向设备主要是摆式陀螺寻北仪,为了实现较高精度,工作时需要将摆式陀螺寻北仪的下方机构架设在稳定的地基上,这给地面瞄准系统的使用带来了局限性[1]。近两年来,激光捷联惯组的对准精度获得了较大的突破和提升,其精度指标和中、高精度的摆式寻北仪可以相提并论,在工作时间和环境适应性上更有优势。定瞄一体技术既可以为发射平台提供机动过程中的经度、纬度和高程等位置信息,同时又可以为武器系统地面瞄准提供基准方向。定瞄一体技术的提出和发展,顺应了武器装备发展的需求,技术途径上可行,性能发展潜力巨大,可实现任意点随机发射和“停下即打”的目标[1]。
文章提出一种基于激光捷联惯组的定瞄一体化系统设计,为实现定瞄一体技术提供了一种技术途径,具有待机时间长、准备时间短、随机发射、环境要求低等特点。
1 系统方案
一种基于激光捷联惯组的定瞄一体化系统由车载定位导航单元和光学传递单元组成,系统组成如图1所示。
车载定位导航单元以激光捷联惯组为核心,由激光陀螺和加表实现系统姿态测量,采用动基座寻北的方法,由激光捷联惯组内的控制板实现系统北向基准输出。同时,车载定位导航单元内配置辅助测量设备(里程计、高程计、地图、卫星设备),利用惯性航位推算(DR)不受外界干扰、卫星定位误差不随时间积累等优点,在激光捷联惯组内的控制板上,采用多信息融合的卡尔曼滤波算法,实现惯性航位推算+电子地图匹配(MM)+卫星组合的定位方式。

图1 定瞄一体化系统组成图Fig.1Composition of positioning and aiming integrated system
其中,里程计完成对车辆速度信息的采集,高程计完成车辆高度变化信息的采集,激光捷联惯组完成车辆姿态信息的采集,激光捷联惯组、里程仪和高度计组成一组定位传感器,其数据进行预处理后输入到航位推算系统;卫星设备作为一组定位传感器,其数据进行预处理后输入到卫星定位单元;处理后的数据采用卡尔曼滤波器进行融合;利用精确的电子地图道路(具有网络拓扑特性)和卫星/DR融合后定位轨迹的相似性进行地图匹配,将得到的最终最优解反馈给航位推算系统,从而实时修正定瞄一体化系统的定位参数,如图2所示。
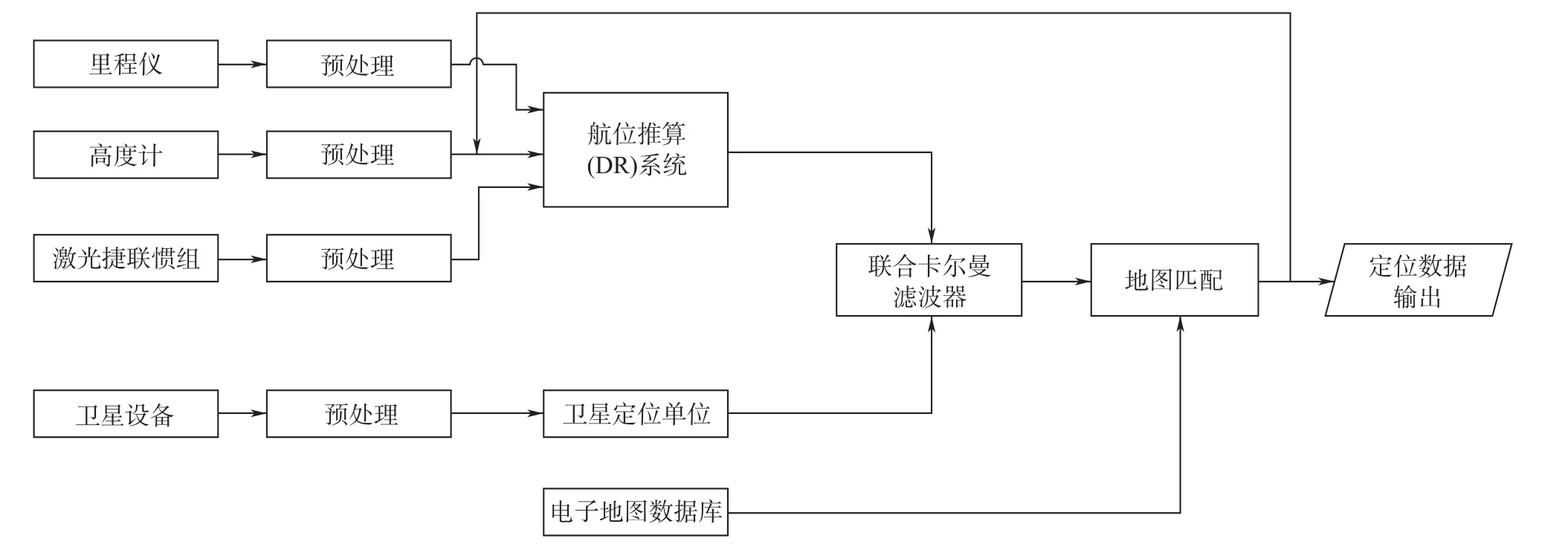
图2 惯性/地图/卫星信息融合框图Fig.2Schematic of DR/map/GPS fusion
动基座下获得的北向基准通过在车载定位导航单元上刚性固联的光学传递单元输出。光学传递单元采用光学传递对准的方式,以光轴为基准的光电测量,实时动态测量出目标设备棱镜与光轴的偏差,并通过姿态误差补偿解算,实现了定瞄一体化系统与外部设备的动基座瞄准。同时通过坐标系变换算法将车载定位导航单元的对准结果传递到光学传递单元的光轴上,实现实时动态测量目标的目的。
2 定位系统设计
一种基于激光捷联惯组的定瞄一体化系统的定位功能主要由车载定位导航单元完成。车载定位导航单元利用卫星数据作为定位观测值,运用多信息融合的卡尔曼滤波算法对航位推算系统进行误差校正。下面给出车载定位导航单元使用的航位推算系统的位置推算数学模型和多信息融合的卡尔曼滤波算法。
2.1航位推算系统的位置推算数学模型



图3 航位推算过程示意图Fig.3Schematic of DR
式(1)中,x(t)、y(t)、z(t)是t时刻车辆在参考坐标系下的位置;x(t-1)、y(t-1)、z(t-1)是t-1时刻车辆在参考坐标系下的位置。
2.2多信息融合的卡尔曼滤波算法
选取系统状态变量为:

其中,δVx、δVy分别为惯导系统与卫星侧向速度误差和纵向速度误差;δφX、δφY、δφZ分别为x轴、y轴、z轴的偏角;δKod为里程仪刻度系数误差。
系统状态方程为:

其中,状态矩阵F为:

其中,γ、θ分别为惯导系统侧向速度与北向夹角和纵向速度与天向的夹角;ωu、ωn分别为惯导系统侧向加速度与北向夹角和纵向加速度与天向的夹角;N为里程仪的脉冲测量值;W为零均值的白噪声。
将以上连续系统状态方程离散化后得:

选取捷联惯导系统侧向速度、纵向速度作为卡尔曼滤波量测变量,量测方程如下:

其中,H为2×6维的量测矩阵:

根据式(7)建立的系统模型[2-4],利用卡尔曼滤波对系统状态变量进行估计,该系统的观测矩阵V=[FFA…FA5]T,经判断矩阵V的秩为rank(V)=6,系统完全可观测,卡尔曼滤波结果不会发散。
3 瞄准系统设计
一种基于激光捷联惯组的定瞄一体化系统的瞄准功能由车载定位导航单元和光学传递单元共同完成对目标的动态瞄准,并实时输出目标的方位信息[5],工作原理如图4所示。

图4 瞄准原理Fig.4Principle of aiming
光学传递单元采用水平瞄准方式,测量目标与车载定位导航单元的相对位置关系。通过驱动电路和稳光回路发出一亮度恒定光源,并聚焦在星点板的焦面上,经光学系统成像,产生无穷远平行光[6]。通过以光轴为基准的光电测量,实时动态测量出目标棱镜与光轴的偏差,并通过姿态误差补偿解算,实时获得测量目标相对车载定位导航单元的相对位置关系。车载定位导航单元通过光学传递单元与测量目标建立的相对位置关系,利用激光捷联惯组输出的姿态矩阵,通过惯性坐标转换算法,实时解算出测量目标的姿态矩阵。
例如,当T0时刻测量目标发生相对线性运动时,测量目标棱镜与光轴的偏差随即发生变化。光电测量根据捕捉到的变化偏差,解算出当前T0时刻测量目标的相对位置关系。同时车载定位导航单元根据当前T0时刻测量目标的相对位置关系,以及当前T0时刻激光捷联惯组输出的姿态矩阵,解算出当前T0时刻测量目标的姿态矩阵,完成T0时刻测量目标的瞄准。
惯性坐标转换算法采用四元数法表示[3],下面给出惯性坐标转换算法的计算公式。
激光捷联惯组输出的姿态角为:航向角ψ、俯仰角θ、横滚角γ,激光捷联惯组的姿态矩阵表示如下:



通过矩阵计算得到光学传递单元的姿态值如下:
4 验证
在完成工程样机后,进行了车载验证。在车载环境下,系统瞄准时间只需5min,各种工况下的瞄准精度可达到90″(3σ),各种工况下的定位精度达到100m(3σ),系统全程只需按下“上电开机”按钮,无需其他操作,实时输出测量目标的定位和瞄准数据。在大风、振动、低温、高温等环境下均进行了测试,系统性能指标无明显变化。
5 结论
本文介绍了一种基于激光捷联惯组的定瞄一体化系统。从武器系统的需求出发,提出了一种基于激光捷联惯组的定瞄一体化技术的解决方案,详细介绍了该定瞄一体化系统的定位原理和瞄准原理,具有待机时间长、准备时间短、随机发射等特点。
[1]王丹丹,陈小军,王丽华.新对准技术应用展望[J].导航与航天运载技术,2009(3):20-22. WANG Dan-dan,CHEN Xiao-jun,WANG Li-hua.Outlook of new alignment technology applications[J].Missiles and Space Vehicles,2009(3):20-22.
[2]秦永元.卡尔曼滤波与组合导航原理[M].西安:西北工业大学,1998. QIN Yong-yuan.Theory of Kalman filer and integrated navigation[M].Xi'an:Northwest Polytechnical University Press,1998.
[3]张宗麟.惯性导航与组合导航[M].北京:航空工业出版社,2000. ZHANG Zong-lin.Inertial navigation and integrated navigation[M].Beijing:Aviation Industry Press,2000.
[4]程向红,万德钧,仲巡.捷联惯导系统的可观测性和可观测度研究[J].东南大学学报,1997,27(6):6-10. CHENG Xiang-hong,WAN De-jun,ZHONG Xun.Study on observability and its degree of strapdown inertial navigation system[J].Journal of Southeast University,1997,27(6):6-10.
[5]吉小辉,孙后环,周必方,蒋筱如.大视场平行光管的研究与设计[J].光学仪器,2007(3):35-40. JI Xiao-hui,SUN Hou-huan,ZHOU Bi-fang,JIANG Xiao-ru.Research and design on wild-view[J].Optical Instruments,2007(3):35-40.
[6]王磊,王守印,周虎,张余彬.平行光管的基本原理及使用方法[J].仪器仪表学报,2006(S1):980-982. WANG Lei,WANG Shou-yin,ZHOU Hu,ZHANG Yubin.Basic principles and use method of collimator[J]. Chinese Journal of Scientific Instrument,2006(S1):980-982.
Design of Positioning andAiming Integrated System Based on LSIMU
ZHAO Lin,KANG Bing,WAN Qi,WEI Rui,DONG Yan-wei
(Beijing Institute of Space Launch Technology,Beijing 100076)
In order to realize the requirement that the weapon system can random launch and“stop then hit”,the paper designs a positioning and aiming integrated system based on LSIMU.The system consists of the positioning unit and the aiming unit.The positioning unit takes LSIMU as the core,by using the method of moving base north seeking.The positioning unit configures a variety of measuring equipments(odometer,altimeter,maps,satellite positioning).It realizes the positioning capability by means of the integrated navigation.The aiming unit rigidly fixed on the positioning unit.It uses the optical way to realize aiming at the dynamic target.At the same time,the positioning unit is outputting the result.The system realizes the positioning and aiming integrated technology.Without loss of the aiming capability and positioning capability,it reduces the environmental requirements.It achieves the expected goal.
laser gyro strap down inertial measurement unit(LSIMU);positioning;aiming;integration
U666.1
A
1674-5558(2016)01-01053
10.3969/j.issn.1674-5558.2016.01.002
赵琳,女,工程师,研究方向为定位定向瞄准系统设计。
2014-12-18
